JP7453152B2 - 磁気共鳴イメージング用アンテナコネクタの自動位置決め - Google Patents
磁気共鳴イメージング用アンテナコネクタの自動位置決め Download PDFInfo
- Publication number
- JP7453152B2 JP7453152B2 JP2020555125A JP2020555125A JP7453152B2 JP 7453152 B2 JP7453152 B2 JP 7453152B2 JP 2020555125 A JP2020555125 A JP 2020555125A JP 2020555125 A JP2020555125 A JP 2020555125A JP 7453152 B2 JP7453152 B2 JP 7453152B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- magnetic resonance
- resonance imaging
- connector
- medical device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002595 magnetic resonance imaging Methods 0.000 title claims description 186
- 230000005855 radiation Effects 0.000 claims description 32
- 238000003384 imaging method Methods 0.000 claims description 30
- 230000015654 memory Effects 0.000 claims description 30
- 238000001959 radiotherapy Methods 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 17
- 238000004590 computer program Methods 0.000 claims description 12
- 230000001678 irradiating effect Effects 0.000 claims 1
- 238000003860 storage Methods 0.000 description 21
- 238000002059 diagnostic imaging Methods 0.000 description 16
- 230000003287 optical effect Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 8
- 230000009286 beneficial effect Effects 0.000 description 7
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000007726 management method Methods 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 230000001902 propagating effect Effects 0.000 description 3
- 238000007792 addition Methods 0.000 description 2
- 210000003484 anatomy Anatomy 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 238000009206 nuclear medicine Methods 0.000 description 2
- 239000000700 radioactive tracer Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000003325 tomography Methods 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 241000699670 Mus sp. Species 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000005251 gamma ray Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 238000002600 positron emission tomography Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000002603 single-photon emission computed tomography Methods 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/34007—Manufacture of RF coils, e.g. using printed circuit board technology; additional hardware for providing mechanical support to the RF coil assembly or to part thereof, e.g. a support for moving the coil assembly relative to the remainder of the MR system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
- A61N5/1048—Monitoring, verifying, controlling systems and methods
- A61N5/1049—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam
- A61N2005/1055—Monitoring, verifying, controlling systems and methods for verifying the position of the patient with respect to the radiation beam using magnetic resonance imaging [MRI]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/283—Intercom or optical viewing arrangements, structurally associated with NMR apparatus
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/36—Electrical details, e.g. matching or coupling of the coil to the receiver
- G01R33/3692—Electrical details, e.g. matching or coupling of the coil to the receiver involving signal transmission without using electrically conductive connections, e.g. wireless communication or optical communication of the MR signal or an auxiliary signal other than the MR signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4808—Multimodal MR, e.g. MR combined with positron emission tomography [PET], MR combined with ultrasound or MR combined with computed tomography [CT]
Description
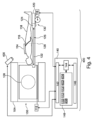
102 磁気共鳴イメージングシステム
104 磁石
106 磁石のボア
108 イメージングゾーン
110 磁場勾配コイル
112 磁場勾配コイル電源
114 磁気共鳴イメージングアンテナ
115 ケーブル
116 トランシーバ
118 被験者
120 被験者支持体
122 遠隔制御可能なアクチュエータ
124 アンテナコネクタ
126 経路
128 コネクタ位置の物理的位置
130 ケーブルマネジメントシステム
140 コンピュータシステム
142 ハードウェアインターフェース
144 プロセッサ
146 ユーザーインターフェース
148 コンピュータメモリ
150 機械実行可能命令
152 パルスシーケンスコマンド
154 コネクタ位置
300 関心領域
302 磁気共鳴イメージングデータ
304 磁気共鳴画像
350 コネクタ位置を受信する
352 遠隔制御可能アクチュエータを制御して、アンテナコネクタを経路に沿ってコネクタ位置に移動させる
400 カメラシステム
402 カメラ画像
404 アンテナ位置モデル
406 アンテナ位置モデルのカメラ画像に対する位置合わせ
500 被験者モデル
502 被験者モデルのカメラ画像に対する位置合わせ
504 関心MRI領域選択
600 医療機器
606 NFC検出器
608 NFC信号
610 受信NFC信号
700 ボタンの線形アレイ
800 タッチセンサ
900 医用イメージングシステム
902 RFシステムトランスシーバ
904 アンテナトランシーバ
906 ワイヤレス接続
1000 医療機器
1002 コイル電子機器付きアンテナプラグ
1100 医療機器
1102 コイル電子機器
1200 医療機器
1202 外部ビーム放射線治療システム
1206 ガントリ
1208 放射線治療源
1210 コリメータ
1214 クライオスタット
1216 超電導コイル
1218 超電導シールドコイル
1220 ボディコイル
1238 ターゲットゾーン
1240 ガントリ回転軸
1242 放射ビーム経路
1250 放射線治療命令
1252 計算されたビーム経路
1300 ターゲットゾーンを照射するように放射線治療システムを制御する放射線治療命令を受信する
1302 放射線治療命令を使用してビーム経路を決定する
1304 ビーム経路を避けるためにコネクタ位置を修正する
1306 放射線治療命令を使用してターゲットゾーンを照射するように放射線治療システムを制御する
1400 医療機器
Claims (16)
- 磁気共鳴イメージングシステムを含む医療機器であって、前記医療機器は、
磁気共鳴イメージングデータを取得するために無線周波数信号を送受信する無線周波数システムであって、磁気共鳴イメージングアンテナに接続する、無線周波数システムと、
前記磁気共鳴イメージングシステムのイメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体であって、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、前記アンテナコネクタを、経路に沿ったコネクタ位置に平行移動させる制御可能なアクチュエータを含む、被験者支持体と、
前記被験者支持体を含むカメラ画像を提供するカメラと、
機械実行可能命令を含むメモリと、
前記磁気共鳴イメージングシステムを制御するためのプロセッサと、を含み、
前記機械実行可能命令の実行は、前記プロセッサに、
前記カメラ画像を使用して前記コネクタ位置を決定させ、前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御させる、医療機器。 - 磁気共鳴イメージングシステムを含む医療機器であって、前記医療機器は、
磁気共鳴イメージングデータを取得するために無線周波数信号を送受信する無線周波数システムであって、磁気共鳴イメージングアンテナに接続する、無線周波数システムと、
前記磁気共鳴イメージングシステムのイメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体であって、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、前記アンテナコネクタを、経路に沿ったコネクタ位置に平行移動させる制御可能なアクチュエータを含み、前記被験者支持体は、前記経路に沿って分布する線形位置セレクタを含む、被験者支持体と、
機械実行可能命令を含むメモリと、
前記磁気共鳴イメージングシステムを制御するためのプロセッサと、を含み、
前記機械実行可能命令の実行は、前記プロセッサに、
非接触手段によって前記コネクタ位置を決定させ、前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御させ、前記線形位置セレクタから選択された位置を受信させ、
前記コネクタ位置は、前記選択された位置を使用して少なくとも部分的に決定され、前記線形位置セレクタは、ボタンの線形アレイ及びタッチセンサのうちのいずれか1つである、医療機器。 - 磁気共鳴イメージングシステムを含む医療機器であって、前記医療機器は、
磁気共鳴イメージングデータを取得するために無線周波数信号を送受信する無線周波数システムであって、磁気共鳴イメージングアンテナに接続する、無線周波数システムと、
前記磁気共鳴イメージングシステムのイメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体であって、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、前記アンテナコネクタを、経路に沿ったコネクタ位置に平行移動させる制御可能なアクチュエータを含む、被験者支持体と、
機械実行可能命令を含むメモリと、
前記磁気共鳴イメージングシステムを制御するためのプロセッサと、
ターゲットゾーンを照射する放射線治療システムと、を含み、
前記ターゲットゾーンは、前記イメージングゾーン内にあり、
前記機械実行可能命令の実行は、前記プロセッサに、
非接触手段によって前記コネクタ位置を決定させ、前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御させ、
前記ターゲットゾーンを照射するように前記放射線治療システムを制御する放射線治療命令を受信させ、
前記放射線治療命令を使用してビーム経路を決定させ、
前記ビーム経路を回避するように前記コネクタ位置を修正させ、前記放射線治療命令を使用して前記ターゲットゾーンを照射するように前記放射線治療システムを制御させる、医療機器。 - 前記被験者支持体を含むカメラ画像を提供するカメラをさらに含み、前記機械実行可能命令の実行はさらに、前記プロセッサに、前記カメラ画像を使用して前記コネクタ位置を決定させる、請求項2又は3に記載の医療機器。
- 前記制御可能なアクチュエータは、遠隔制御可能なアクチュエータである、請求項1から4のいずれか一項に記載の医療機器。
- 磁気共鳴イメージングシステムを含む医療機器であって、前記医療機器は、
磁気共鳴イメージングデータを取得するために無線周波数信号を送受信する無線周波数システムであって、磁気共鳴イメージングアンテナに接続する、無線周波数システムと、
前記磁気共鳴イメージングシステムのイメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体であって、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、前記アンテナコネクタを、経路に沿ったコネクタ位置に平行移動させる制御可能なアクチュエータを含み、前記被験者支持体は、前記磁気共鳴イメージングアンテナからNFC信号を受信するNFC検出器を含む、被験者支持体と、
機械実行可能命令を含むメモリと、
前記磁気共鳴イメージングシステムを制御するためのプロセッサと、を含み、
前記機械実行可能命令の実行は、前記プロセッサに、
前記NFC信号を少なくとも部分的に使用して前記コネクタ位置を決定させ、前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御させる、医療機器。 - 前記プロセッサは、前記カメラ画像に対してアンテナ位置モデルを位置合わせし、前記カメラ画像を使用する前記コネクタ位置の決定は、前記アンテナ位置モデルの前記位置合わせを使用して少なくとも部分的に行われる、請求項1、請求項4、又は、請求項1若しくは4を引用する請求項5に記載の医療機器。
- 前記プロセッサは、前記カメラ画像に対して被験者モデルを位置合わせし、前記カメラ画像を使用する前記コネクタ位置の決定は、前記被験者モデルの前記位置合わせを使用して少なくとも部分的に行われる、請求項1、請求項4、請求項1若しくは4を引用する請求項5、又は、請求項7に記載の医療機器。
- 前記機械実行可能命令の実行はさらに、前記プロセッサに、関心MRI領域選択を受信させ、前記コネクタ位置は、前記関心MRI領域選択及び前記被験者モデルの前記位置合わせを使用して少なくとも部分的に決定される、請求項8に記載の医療機器。
- 前記磁気共鳴イメージングアンテナを含む、請求項1から9のいずれか一項に記載の医療機器。
- 前記磁気共鳴イメージングアンテナは、アンテナプラグを有するRFケーブルを含み、前記アンテナプラグは、前記アンテナコネクタと結合し、前記アンテナプラグは、MRIアンテナ前置増幅器、MRIアンテナ前置増幅器、デジタル-アナログ変換器、アナログ-デジタル変換器、及びこれらの組み合わせのうちのいずれか1つを含む、請求項10に記載の医療機器。
- 前記無線周波数システムは、前記被験者支持体内にコイル電子機器を含み、前記コイル電子機器は、前記アンテナコネクタと共に移動し、前記コイル電子機器は、MRIアンテナ前置増幅器、デジタル-アナログ変換器、アナログ-デジタル変換器、及びこれらの組み合わせのうちのいずれか1つを含む、請求項1から10のいずれか一項に記載の医療機器。
- 前記アンテナコネクタは、前記磁気共鳴イメージングアンテナと無線接続を形成するRFシステムトランシーバを含み、前記機械実行可能命令の実行はさらに、前記プロセッサに、
前記RFシステムトランシーバを少なくとも部分的に使用して前記磁気共鳴イメージングアンテナの位置を決定させ、前記磁気共鳴イメージングアンテナの前記位置を使用して前記コネクタ位置を決定させる、請求項1から9のいずれか一項に記載の医療機器。 - 前記医療機器は前記磁気共鳴イメージングアンテナをさらに含み、前記磁気共鳴イメージングアンテナはさらに、前記RFシステムトランシーバとの前記無線接続を形成するアンテナトランシーバを含む、請求項13に記載の医療機器。
- 磁気共鳴イメージングシステムを含む医療機器を操作する方法であって、前記医療機器はさらに、前記磁気共鳴イメージングシステムのイメージングゾーンから磁気共鳴イメージングデータを取得する無線周波数システムを含み、前記無線周波数システムは、前記磁気共鳴イメージングデータを取得するために無線周波数信号を送受信し、前記無線周波数システムは、磁気共鳴イメージングアンテナに接続し、前記医療機器はさらに、前記イメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体を含み、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、前記アンテナコネクタを経路に沿ってコネクタ位置に平行移動させる制御可能なアクチュエータを含み、前記医療機器はさらに、前記被験者支持体を含むカメラ画像を提供するカメラを含み、前記方法は、
前記カメラ画像を使用して前記コネクタ位置を決定するステップと、
前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御するステップと、
を含む、方法。 - 磁気共鳴イメージングシステムを含む医療機器を制御するプロセッサによる実行のための機械実行可能命令を含むコンピュータプログラムであって、前記医療機器はさらに、前記磁気共鳴イメージングシステムのイメージングゾーンから磁気共鳴イメージングデータを取得する無線周波数システムを含み、前記無線周波数システムは、前記磁気共鳴イメージングデータを取得するために無線周波数信号を送受信し、前記無線周波数システムは、磁気共鳴イメージングアンテナに接続し、前記医療機器はさらに、前記イメージングゾーン内の被験者の少なくとも一部を支持する被験者支持体を含み、前記被験者支持体は、前記磁気共鳴イメージングアンテナに接続するアンテナコネクタを含み、前記無線周波数システムは、前記アンテナコネクタを介して前記磁気共鳴イメージングアンテナに接続し、前記被験者支持体は、 前記アンテナコネクタを経路に沿ったコネクタ位置に平行移動させる制御可能なアクチュエータを含み、前記医療機器はさらに、前記被験者支持体を含むカメラ画像を提供するカメラを含み、前記機械実行可能命令の実行は、前記プロセッサに、
前記カメラ画像を使用して前記コネクタ位置を決定させ、
前記アンテナコネクタを前記経路に沿って前記コネクタ位置に移動させるために前記制御可能なアクチュエータを制御させる、
コンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP18166265.1A EP3553546A1 (en) | 2018-04-09 | 2018-04-09 | Automatic positioning of antenna connectors for magnetic resonance imaging |
| EP18166265.1 | 2018-04-09 | ||
| PCT/EP2019/058264 WO2019197215A1 (en) | 2018-04-09 | 2019-04-02 | Automatic positioning of antenna connectors for magnetic resonance imaging |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021520871A JP2021520871A (ja) | 2021-08-26 |
| JPWO2019197215A5 JPWO2019197215A5 (ja) | 2022-04-08 |
| JP7453152B2 true JP7453152B2 (ja) | 2024-03-19 |
Family
ID=62063262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020555125A Active JP7453152B2 (ja) | 2018-04-09 | 2019-04-02 | 磁気共鳴イメージング用アンテナコネクタの自動位置決め |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210030306A1 (ja) |
| EP (2) | EP3553546A1 (ja) |
| JP (1) | JP7453152B2 (ja) |
| CN (1) | CN112272776A (ja) |
| WO (1) | WO2019197215A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019218285A1 (de) * | 2019-11-26 | 2021-05-27 | Siemens Healthcare Gmbh | Kopfspulenanordnung mit automatisch positionierbarer Sendespuleneinheit |
| USD951274S1 (en) * | 2020-12-30 | 2022-05-10 | Varian Medical Systems, Inc. | Display screen of an electronic device with a graphical user interface |
| TWI776669B (zh) * | 2021-09-07 | 2022-09-01 | 川升股份有限公司 | 評估受人體影響後之天線輻射效率的建模系統 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007068984A (ja) | 2005-08-10 | 2007-03-22 | Toshiba Corp | 磁気共鳴イメージング装置、コイル支持ユニット、高周波コイルユニット、ならびに磁気共鳴イメージング装置を制御する制御方法 |
| JP2016524510A (ja) | 2013-06-17 | 2016-08-18 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 磁気共鳴画像化被験者支持器 |
| WO2017077435A1 (en) | 2015-11-05 | 2017-05-11 | Koninklijke Philips N.V. | Mri system with automatic positioning of radio-frequency coil based upon wireless signal and method of operation thereof |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3935082C1 (ja) * | 1989-10-20 | 1991-01-31 | Siemens Ag, 1000 Berlin Und 8000 Muenchen, De | |
| JP4327311B2 (ja) * | 1999-10-01 | 2009-09-09 | 東芝医用システムエンジニアリング株式会社 | Mrイメージング用rfコイル装置 |
| US7570056B2 (en) * | 2005-08-10 | 2009-08-04 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus |
| JP5238156B2 (ja) * | 2005-11-02 | 2013-07-17 | 株式会社東芝 | 磁気共鳴イメージング装置およびこの装置における高周波コイルの選択方法 |
| DE102009004448B4 (de) * | 2009-01-13 | 2012-05-24 | Siemens Aktiengesellschaft | Spulenpositionserkennung |
| US8467847B2 (en) * | 2010-09-08 | 2013-06-18 | Siemens Medical Solutions Usa, Inc. | Hybrid MR/PET scanner with patient table split cable feed |
| US9529063B2 (en) * | 2011-09-07 | 2016-12-27 | Koninklijke Philips N.V. | MR receive coil platform with selective engagement between receive coil and patient table top |
| JP6073612B2 (ja) * | 2012-09-12 | 2017-02-01 | 東芝メディカルシステムズ株式会社 | 磁気共鳴イメージング装置 |
| JP6001177B2 (ja) * | 2012-09-18 | 2016-10-05 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 磁気共鳴で案内される直線加速器 |
| DE112013005114T5 (de) * | 2012-10-23 | 2015-09-10 | Koninklijke Philips N.V. | Spezifische Apsorptionsraten - Steuerung für die Magnetresonanz - (SAR) Bildgebung |
| CN105190341B (zh) * | 2013-05-02 | 2019-05-28 | 皇家飞利浦有限公司 | 用于系列局部rf线圈的包括数字转换器的可拆卸接收器块 |
| KR101541291B1 (ko) * | 2013-07-17 | 2015-08-03 | 삼성전자주식회사 | Mri 장치 및 mri 장치에 의한 알림 정보 제공 방법, 및 rf 코일 및 rf 코일에 의한 알림 정보 제공 방법 |
| CN203576502U (zh) * | 2013-09-09 | 2014-05-07 | 皇家飞利浦有限公司 | 具有可移动线圈连接器的磁共振患者床 |
| US9517021B2 (en) * | 2013-09-23 | 2016-12-13 | Toshiba Medical Systems Corporation | Communicating between MRI control system and RF coils |
| JP6615122B2 (ja) * | 2014-05-09 | 2019-12-04 | コーニンクレッカ フィリップス エヌ ヴェ | Mriモジュールと、rfコイルの位置を決定するための手段とを含む療法システム |
| WO2015197741A1 (en) * | 2014-06-27 | 2015-12-30 | Koninklijke Philips N.V. | Positioning of a magnetic resonance imaging antenna within the homogeneous field zone |
| WO2016034364A1 (en) * | 2014-09-01 | 2016-03-10 | Koninklijke Philips N.V. | Magnetic resonance imaging receive coil with reduced radiation attenuation |
| KR20160049273A (ko) * | 2014-10-27 | 2016-05-09 | 삼성전자주식회사 | 의료 영상 장치 |
| US10481228B2 (en) * | 2014-12-04 | 2019-11-19 | Koninklijke Philips N.V. | Light data communication link device for use in magnetic resonance examination systems |
| US9715304B2 (en) | 2015-06-30 | 2017-07-25 | Synaptics Incorporated | Regular via pattern for sensor-based input device |
| DE102016212043B4 (de) * | 2016-07-01 | 2018-03-01 | Siemens Healthcare Gmbh | Patientenliege mit flexibler HF Sendeleistungsverteilung für einen Magnetresonanztomographen |
-
2018
- 2018-04-09 EP EP18166265.1A patent/EP3553546A1/en not_active Withdrawn
-
2019
- 2019-04-02 US US17/046,109 patent/US20210030306A1/en active Pending
- 2019-04-02 JP JP2020555125A patent/JP7453152B2/ja active Active
- 2019-04-02 EP EP19713514.8A patent/EP3775951A1/en active Pending
- 2019-04-02 CN CN201980038918.6A patent/CN112272776A/zh active Pending
- 2019-04-02 WO PCT/EP2019/058264 patent/WO2019197215A1/en unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007068984A (ja) | 2005-08-10 | 2007-03-22 | Toshiba Corp | 磁気共鳴イメージング装置、コイル支持ユニット、高周波コイルユニット、ならびに磁気共鳴イメージング装置を制御する制御方法 |
| JP2016524510A (ja) | 2013-06-17 | 2016-08-18 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 磁気共鳴画像化被験者支持器 |
| WO2017077435A1 (en) | 2015-11-05 | 2017-05-11 | Koninklijke Philips N.V. | Mri system with automatic positioning of radio-frequency coil based upon wireless signal and method of operation thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021520871A (ja) | 2021-08-26 |
| EP3775951A1 (en) | 2021-02-17 |
| US20210030306A1 (en) | 2021-02-04 |
| EP3553546A1 (en) | 2019-10-16 |
| CN112272776A (zh) | 2021-01-26 |
| WO2019197215A1 (en) | 2019-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2872913B1 (en) | Magnetic resonance guided linac | |
| US10307616B2 (en) | Medical apparatus with a radiation therapy device and a radiation detection system | |
| JP6348902B2 (ja) | インターリーブスキャニングによる磁気共鳴誘導治療 | |
| CN105792894B (zh) | 用于外部射束放射治疗和短程治疗的医学仪器 | |
| JP7453152B2 (ja) | 磁気共鳴イメージング用アンテナコネクタの自動位置決め | |
| CN105793721B (zh) | 使用零回波时间脉冲序列的磁共振成像系统 | |
| CN106662626A (zh) | 包含mri模块和用于确定rf线圈的位置的单元的治疗系统 | |
| EP3117230B1 (en) | Magnetic resonance antenna with electronic dosimeters | |
| JP6499209B2 (ja) | 一体型光子検出器リングを有する磁気共鳴イメージングシステム | |
| CN113677266B (zh) | 组合的光学图像生成器与光学成像系统 | |
| CN113678012B (zh) | 用于磁共振成像的二维显示器 | |
| US20220354433A1 (en) | Configurable radiotherapy couch top for magnetic resonance radiotherapy simulation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220331 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230306 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20231002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231226 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240307 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7453152 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |