JP7433848B2 - 撮像装置、コンピュータプログラム、記憶媒体および撮像制御方法 - Google Patents
撮像装置、コンピュータプログラム、記憶媒体および撮像制御方法 Download PDFInfo
- Publication number
- JP7433848B2 JP7433848B2 JP2019204141A JP2019204141A JP7433848B2 JP 7433848 B2 JP7433848 B2 JP 7433848B2 JP 2019204141 A JP2019204141 A JP 2019204141A JP 2019204141 A JP2019204141 A JP 2019204141A JP 7433848 B2 JP7433848 B2 JP 7433848B2
- Authority
- JP
- Japan
- Prior art keywords
- focus
- control
- subject
- tilt
- imaging device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 77
- 238000000034 method Methods 0.000 title claims description 29
- 238000004590 computer program Methods 0.000 title claims description 5
- 238000012937 correction Methods 0.000 claims description 52
- 230000003287 optical effect Effects 0.000 claims description 29
- 238000011156 evaluation Methods 0.000 description 20
- 238000004364 calculation method Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 17
- 238000012545 processing Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012806 monitoring device Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/95—Computational photography systems, e.g. light-field imaging systems
- H04N23/958—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging
- H04N23/959—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging by adjusting depth of field during image capture, e.g. maximising or setting range based on scene characteristics
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/58—Means for changing the camera field of view without moving the camera body, e.g. nutating or panning of optics or image sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/631—Graphical user interfaces [GUI] specially adapted for controlling image capture or setting capture parameters
- H04N23/632—Graphical user interfaces [GUI] specially adapted for controlling image capture or setting capture parameters for displaying or modifying preview images prior to image capturing, e.g. variety of image resolutions or capturing parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/695—Control of camera direction for changing a field of view, e.g. pan, tilt or based on tracking of objects
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
- Lens Barrels (AREA)
- Automatic Focus Adjustment (AREA)
Description
そのため、ピントが合う領域は画面の一部となり、その他の領域はピントが合っていない状態となる。
このような課題に対し、レンズもしくは撮像素子を相対的に傾ける制御(以下、あおり制御)によって被写界深度範囲を広げる、シャインプルーフの定理を適用した撮像装置が一般的に知られている。
また、被写体が変化することが考えられ、その時々に応じて適切なあおり制御を行うことが必要となる。その場合にあおり角度だけ制御すると、複数の被写体のうち一つの被写体には合わせることができるが、複数の領域の被写体に合わせることができない。そのため、あおり角度を変更するだけでなく、同時にフォーカスレンズを制御することが必要となる。
そこで本発明の目的は、被写体が変化した場合などでも、フォーカスレンズ駆動とあおり制御を最適化することができ、高速で最適なあおり制御が可能な撮像装置を提供することにある。
撮像素子または撮像光学系の少なくとも一つを駆動し、あおり制御を行うあおり制御手段と、
フォーカスレンズを駆動するフォーカスレンズ駆動手段と、
前記あおり制御手段と前記フォーカスレンズ駆動手段のどちらかひとつを用いてフォーカス補正を行う第1の制御モードと、前記あおり制御手段と前記フォーカスレンズ駆動手段の両方を用いてフォーカス補正を行うための第2の制御モードを有するとともに、撮影画像内の被写体領域の数に応じて、前記第1の制御モードと前記第2の制御モードの一つを選択する制御手段と、を有し、
前記制御手段は、前記被写体領域に対する前記撮像光学系の結像面からのフォーカス補正量を算出すると共に、前記あおり制御手段を用いて前記フォーカス補正を行う場合において、撮影画像における、前記被写体領域とあおり軸との距離に基づき前記フォーカス補正量を算出することを特徴とする。
<実施例1>
図1は、本発明の実施例1にかかわる撮像装置の構成を示すブロック図である。
本実施例の撮像光学系としてのレンズユニットは、光軸方向に移動して焦点距離を変更するズームレンズ101と、光軸方向に移動してピントの制御を行うフォーカスレンズ102と、光量を調整する絞りユニット103とを有する。図1における撮像光学系は、その一例を示したものであり、ズームレンズ101、フォーカスレンズ102、絞りユニット103のうちの一部がなくても良い。
BPF104は撮像光学系の光路に対し進退可能なものもある。被写体像は、撮像素子106により光電変換され撮像信号を形成する。
撮像素子106から出力されたアナログの撮像信号は、AGC(Auto Gain Control)107によりゲイン調整され、AD変換器108によりデジタル信号に変換された後、カメラ信号処理部109に入力される。
映像信号は、通信部110を介して、有線または無線通信によりネットワークを介して監視モニタ装置111に出力される。また通信部110は、外部PC等の外部制御装置からのコマンドを受けて撮像装置内のあおり/フォーカス制御部115にコマンドなどの制御信号を渡す。
フォーカス評価値算出部112はAD変換器108やカメラ信号処理部109からRGBの画素値や輝度値を受け取り、あおり制御やオートフォーカス(以下、AF)で使用するためのフォーカス評価値を算出する。フォーカス評価値は例えば監視モニタ装置111の不図示の表示部に表示される撮影画面を複数の被写体領域に分割し、被写体領域ごとに画像のコントラストや高周波成分を基に算出される。フォーカス評価値としては、フォーカス調整に用いることができる評価値であれば位相差AF方式や赤外光AF方式など、どのような方式によって取得しても構わない。
被写体判定部113はカメラ信号処理部109からの映像信号を画像認識して、撮影画面内から特定の被写体の検出を行う。特定の被写体としては、ユーザーにより任意に指定された、もしくは予めデフォルトとして設定された被写体(例えば人、顔、車など)であるが、これらの例に限らない。
本実施例では、撮像素子106をチルトするための回転軸は撮影画面の中心を通る水平方向の(撮像素子の長手方向に沿った)軸であり、この回転軸を中心に撮像素子106は撮像光学系に対して相対的にチルト制御される。
フォーカス駆動部117はあおり/フォーカス制御部115から指示されたフォーカスの設定位置に基づいてフォーカスレンズ102の位置を制御する。
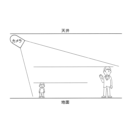
あおり制御を行うシーンの例として図2のようなシーンを想定する。図2はあおり制御を行うシーンの例を示す図である。
一方、図3はあおり制御方法を説明する図であり、あおり制御とは図3に示すように例えば撮像素子106をチルトすることによって、ピントの合った面を地面などの水平面に平行にする制御である。これにより地面と平行な面に関して、近距離から遠距離の被写体まで被写界深度内に入り、ピントの合った状態を維持することができる。
あおり角度bはシャインプルーフの定理より、次式(1)で算出される。
なお、fは焦点距離、Lは被写体距離、αは光軸とピント面の角度である。
また、高さの異なる被写体が複数存在する場合には、あおり制御だけでは最適な制御ができない場合が多い。
その一例を、図8を用いて説明する。図8はフォーカスレンズ駆動とあおり制御を説明する図である。
x=k1×α+β (式2)
y=k2×α-β (式3)
となり、連立方程式を解くと、
β=(k2×x-k1×y)/(k1+k2) (式4)
α=(x+y)/(k1+k2) (式5)
θ=arctan((x+y)/(k1+k2)) (式6)
により算出できる。また、フォーカスレンズの駆動量(フォーカスレンズ駆動量)γを近似的に算出するには、例えばγ=β/(フォーカスレンズの敏感度)で算出できる。なお、正確に算出するためには敏感度に応じた高次方程式や多項式を解くようにしても良い。
なお、フォーカスレンズ駆動量γの算出方法に関しては種々の変形及び近似等が可能であり、それらの変形や近似等を用いた算出方法であっても良い。
遠距離の被写体人901、被写体人902、近距離の被写体人903それぞれに対する撮像光学系の結像面からのフォーカス補正量(ずれ量、ボケ量)をa[um]、b[um]、c[um]とする。
FΔ≧k1’×α+β (式6)
FΔ≧k2’×α+β (式7)
FΔ≧k3’×α-β (式8)
a[um]、b[um]、c[um]が被写界深度に収まるとユーザーからはピントのボケが分からないし、第一の方法のようにa[um]、b[um]、c[um]の最大値が最小になるように追い込む必要がない。第二の方法で制御を行い、撮影したい被写体が被写界深度に入らない場合に、第一の方法で追い込む制御も考えられる。
また、被写体が変わるということは、いなくなることも考えられる。その場合には、地面などの平面にピントが合ってしまう可能性がある。また、本来、ピントを合わせたい平面から離れてしまう場合もあるため、固定のフォーカスレンズの位置、あおり角度に制御する方法が考えらえる。
本実施例においては、あおり制御手段と前記フォーカスレンズ駆動手段の少なくとも一つを用いてフォーカス補正を行うための複数の制御モードを有する。さらに、撮影画面内の被写体領域の数に応じて、前記複数の制御モードの一つを選択する点に特徴を有する。
S1101でスキャンを行う。スキャンとは撮像素子106のあおり角度またはフォーカスレンズ102を一方向に徐々に変化させるように駆動する制御である。S1102でスキャン中にフォーカス評価値算出部112にて画面内の複数の領域に対して領域ごとに評価値を算出する。
S1104で、被写体のいる領域数(被写体領域の数)を判定する。S1104で1つであると判定された場合、S1105にて、被写体のいる領域にピントが合うようにあおり制御かフォーカスレンズ駆動のいずれかを用いてフォーカス補正を行う第1の制御モードを選択する。
S1104で被写体のいる領域数が2つである場合には、S1106にて第2の制御モードを選択する。即ち、あおり制御とフォーカスレンズ駆動の両方を用いてフォーカス補正を行う。具体的には、例えば式2~式5を用いて前述の通り被写体のいる領域にピントが合うように、被写体のいる領域のフォーカス補正量を算出する。
そして、上記のあおり角度θ、フォーカスレンズ駆動量γになるようにあおり制御とフォーカスレンズ駆動を行う。
なお、領域ごとのフォーカス補正量の計算としては、前述の方法に限ったものでなく、外測センサや、各画素が視差を有する複数の光電変換部から構成された撮像素子を用いた、いわゆる撮像面位相差方式によって被写体距離を取得するものであっても構わない。
以上説明したように、実施例1においては、S1103によって撮影画面内の被写体領域の数を自動的に判別している。そして、その数に応じて、あおり制御手段とフォーカスレンズ駆動手段の少なくとも一方を用いた複数のフォーカス補正のための制御モードのうちの一つを選択している。従って、被写体の変化によってピントがずれてしまったりせず、状況に応じた最適なあおり制御とフォーカスレンズ駆動を実現することができる。
<実施例2>
図12は、実施例2における撮影シーンの一例を示した図である。図12中に映っている被写体A1201、被写体B1202に対して、この2つの領域をユーザーが領域指定手段(タッチパネルやマウス等)を用いて領域指定する。本実施例では、ユーザーが領域指定手段を用いて領域の原点やコーナー、幅、高さ等を指定することで指定領域の設定を行う。
このように図11のステップS1101~S1103における、撮影画面内の被写体領域の自動判別を実行する代わりに、ユーザーによって撮影画面内の被写体領域を手動で指定するようにしても良い。その場合には、ユーザーが指定した撮影画面内の被写体領域の数が、ステップS1104において、被写体のいる領域の数に相当することになる。
<実施例3>
図13は実施例3の処理フローの一例を示したフローチャートである。
まずS1301において上記で述べたようにユーザーが図12に示すような任意の2つの指定領域A(第1領域)(1203)、指定領域B(第2領域)(1204)を設定する。ここで指定領域Aを評価枠A、指定領域Bを評価枠Bと呼ぶ。
算出方法は実施例1に記載の通りである。
あおり角θは実施例1に記載したように、式6から、
θ=arctan((x+y)/(k1+k2))
で求められる。
以上の算出結果の値に基づいて、S1307であおり角とフォーカス位置を制御することであおり制御が可能となる。
また、本実施例で説明しなかった2つよりも多い領域もしくは2つよりも少ない領域を選択した場合の処理に関しては、実施例1に記載の複数ピント位置での処理と同様の対応で対処することが可能である。
さらに指定領域の設定に関しても、本実施例では矩形で説明を行ったが領域を指定するうえで、その目的が果たせるものであれば指定の方法、形状はどのようなものでも構わない。
なお以上の実施例1~3において、式を用いてCPU等で演算を行うことによって演算結果を導出する例を説明した。しかし、式を用いた演算の代わりに、予め不図示のメモリにこれらの式に対応したテーブルを記憶しておき、そのテーブルを用いて式に基づく演算結果と同様の結果を直接導出しても良い。
また、本実施例における制御の一部または全部を上述した実施例の機能を実現するコンピュータプログラムをネットワーク又は各種記憶媒体を介して撮像装置や撮像制御装置に供給するようにしてもよい。そしてその撮像装置や撮像制御装置におけるコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行するようにしてもよい。その場合、そのプログラム、及び該プログラムを記憶した記憶媒体は本発明を構成することとなる。
102 フォーカスレンズ
103 絞りユニット
104 バンドパスフィルタ
105 カラーフィルタ
106 撮像素子
107 AGC
108 AD変換機
109 カメラ信号処理部
110 通信部
111 監視モニタ装置
112 フォーカス評価値算出部
113 被写体判定部
114 あおり/フォーカスレンズ駆動量算出部
115 あおり/フォーカス制御部
116 撮像素子駆動部
117 フォーカス駆動部
Claims (16)
- 撮像素子または撮像光学系の少なくとも一つを駆動し、あおり制御を行うあおり制御手段と、
フォーカスレンズを駆動するフォーカスレンズ駆動手段と、
前記あおり制御手段と前記フォーカスレンズ駆動手段のどちらかひとつを用いてフォーカス補正を行う第1の制御モードと、前記あおり制御手段と前記フォーカスレンズ駆動手段の両方を用いてフォーカス補正を行うための第2の制御モードを有するとともに、撮影画像内の被写体領域の数に応じて、前記第1の制御モードと前記第2の制御モードの一つを選択する制御手段と、を有し、
前記制御手段は、前記被写体領域に対する前記撮像光学系の結像面からのフォーカス補正量を算出すると共に、前記あおり制御手段を用いて前記フォーカス補正を行う場合において、撮影画像における、前記被写体領域とあおり軸との距離に基づき前記フォーカス補正量を算出することを特徴とする撮像装置。 - 前記制御手段は、前記撮影画像内の被写体領域の数が2つ以上の場合には、前記あおり制御手段と前記フォーカスレンズ駆動手段を用いて被写体にフォーカス補正を行う第2の制御モードを選択することを特徴とする請求項1に記載の撮像装置。
- 前記制御手段は、前記撮影画像内の被写体領域の数が1つの場合には、前記あおり制御手段またはフォーカスレンズ駆動手段のどちらかひとつを用いてフォーカス補正を行う第1の制御モードを選択することを特徴とする請求項1又は2に記載の撮像装置。
- 前記制御手段は、前記撮影画像内の被写体領域の数が2つ以上の場合には、前記あおり制御手段と前記フォーカスレンズ駆動手段を用いて被写体にフォーカス補正を行う第2の制御モードを選択することを特徴とする請求項1~3のいずれか1項に記載の撮像装置。
- 前記制御手段は、前記撮影画像内に被写体領域がない場合には、予め設定したフォーカス補正量となるように制御する第3の制御モードを選択することを特徴とする請求項1~4のいずれか1項に記載の撮像装置。
- 前記予め設定したフォーカス補正量は過去の履歴に基づき設定されることを特徴とする請求項5に記載の撮像装置。
- 前記制御手段は、前記撮影画像内の被写体領域の数が所定数以上の場合には、複数の被写体に対するフォーカス補正量の最大値が最も小さくなるように前記あおり制御手段または前記フォーカスレンズ駆動手段を制御することを特徴とする請求項1に記載の撮像装置。
- 前記制御手段は、前記撮影画像内の被写体領域の数が所定数以上の場合には、複数の被写体に対するフォーカス補正量がそれぞれ被写界深度に入るように前記あおり制御手段または前記フォーカスレンズ駆動手段を制御することを特徴とする請求項1に記載の撮像装置。
- 被写体の距離を算出する測距手段を有し、
前記制御手段は、前記撮影画像内の被写体領域の数が所定数以上の場合には、前記撮像素子に相対的に近い被写体を優先して前記あおり制御手段または前記フォーカスレンズ駆動手段を制御することを特徴とする請求項1に記載の撮像装置。 - 前記所定数は3であることを特徴とする請求項7~9のいずれか1項に記載の撮像装置。
- 更に、前記制御手段とネットを介して通信するための外部制御装置を有することを特徴とする請求項1~10のいずれか1項に記載の撮像装置。
- 前記制御手段は、前記撮影画像内の被写体領域を自動的に判別することを特徴とする請求項1~11のいずれか1項に記載の撮像装置。
- ユーザーが指定した前記撮影画像内の被写体領域を取得する取得手段を有することを特徴とする請求項1~11のいずれか1項に記載の撮像装置。
- 請求項1~13のいずれか1項に記載の撮像装置の各手段としてコンピュータを機能させるためのコンピュータプログラム。
- 請求項14に記載のコンピュータプログラムを記憶したコンピュータで読み取り可能な記憶媒体。
- 撮像素子または撮像光学系の少なくとも一つを駆動し、あおり制御を行うあおり制御ステップと、
フォーカスレンズを駆動するフォーカスレンズ駆動ステップと
前記あおり制御ステップと前記フォーカスレンズ駆動ステップのどちらかひとつを用いてフォーカス補正を行う第1の制御モードと、前記あおり制御ステップと前記フォーカスレンズ駆動ステップの両方を用いてフォーカス補正を行うための第2の制御モードを有するとともに、撮影画像内の被写体領域の数に応じて、前記第1の制御モードと前記第2の制御モードの一つを選択する制御ステップと、を有し、
前記制御ステップは、前記被写体領域に対する前記撮像光学系の結像面からのフォーカス補正量を算出すると共に、前記あおり制御ステップを用いて前記フォーカス補正を行う場合において、撮影画像における、前記被写体領域とあおり軸との距離に基づき前記フォーカス補正量を算出することを特徴とする撮像装置の制御方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/811,454 US11381731B2 (en) | 2019-03-15 | 2020-03-06 | Imaging apparatus, imaging control method, and storage medium |
| EP20162323.8A EP3722871B1 (en) | 2019-03-15 | 2020-03-11 | Imaging apparatus, imaging control method, and storage medium |
| KR1020200030133A KR20200110210A (ko) | 2019-03-15 | 2020-03-11 | 촬상 장치, 촬상 제어 방법, 및 저장 매체 |
| CN202010174269.7A CN111698417B (zh) | 2019-03-15 | 2020-03-13 | 摄像设备、摄像控制方法和存储介质 |
| US17/833,271 US11750939B2 (en) | 2019-03-15 | 2022-06-06 | Imaging apparatus, imaging control method, and storage medium |
| JP2024016683A JP2024040284A (ja) | 2019-03-15 | 2024-02-06 | 撮像装置、コンピュータプログラム、および撮像制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019048401 | 2019-03-15 | ||
| JP2019048401 | 2019-03-15 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024016683A Division JP2024040284A (ja) | 2019-03-15 | 2024-02-06 | 撮像装置、コンピュータプログラム、および撮像制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020154283A JP2020154283A (ja) | 2020-09-24 |
| JP2020154283A5 JP2020154283A5 (ja) | 2022-11-18 |
| JP7433848B2 true JP7433848B2 (ja) | 2024-02-20 |
Family
ID=72558959
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019204141A Active JP7433848B2 (ja) | 2019-03-15 | 2019-11-11 | 撮像装置、コンピュータプログラム、記憶媒体および撮像制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7433848B2 (ja) |
| KR (1) | KR20200110210A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7293309B2 (ja) * | 2021-03-17 | 2023-06-19 | キヤノン株式会社 | 撮像装置、制御方法および記憶媒体 |
| US11722769B2 (en) | 2021-03-17 | 2023-08-08 | Canon Kabushiki Kaisha | Image pickup apparatus, control method, and storage medium |
| US12047681B2 (en) * | 2021-04-21 | 2024-07-23 | Canon Kabushiki Kaisha | Image pickup apparatus including tilt driving portion, control method, and memory medium |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008205569A (ja) | 2007-02-16 | 2008-09-04 | Fujifilm Corp | 撮像装置及び方法 |
| JP2009015828A (ja) | 2007-06-06 | 2009-01-22 | Sony Corp | 画像処理装置、画像処理方法及び画像処理プログラム |
| JP2014155063A (ja) | 2013-02-08 | 2014-08-25 | Sharp Corp | 解像度測定用チャート、解像度測定方法、カメラモジュールにおける位置調整方法およびカメラモジュールの製造方法 |
| JP2015031754A (ja) | 2013-07-31 | 2015-02-16 | キヤノン株式会社 | 撮像装置及びその制御方法、情報処理装置及びその制御方法、及び、システム |
| US20150138383A1 (en) | 2013-11-21 | 2015-05-21 | International Business Machines Corporation | Automated tilt and shift optimization |
| JP2015102694A (ja) | 2013-11-25 | 2015-06-04 | オリンパス株式会社 | アライメント装置、顕微鏡システム、アライメント方法、及びアライメントプログラム |
| JP2017098613A (ja) | 2015-11-18 | 2017-06-01 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| JP2017134322A (ja) | 2016-01-29 | 2017-08-03 | キヤノン株式会社 | レンズ装置 |
| US20170272658A1 (en) | 2016-03-16 | 2017-09-21 | Ricoh Imaging Company, Ltd. | Photographing apparatus |
| JP2017173802A (ja) | 2016-03-16 | 2017-09-28 | リコーイメージング株式会社 | 撮影装置 |
| JP2018056810A (ja) | 2016-09-29 | 2018-04-05 | リコーイメージング株式会社 | 撮像装置及び撮像方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04324843A (ja) * | 1991-04-25 | 1992-11-13 | Canon Inc | チルト手段を有したカメラ |
| JP3733228B2 (ja) * | 1997-12-25 | 2006-01-11 | キヤノン株式会社 | アオリ機構付き撮像装置、方法、及び記憶媒体 |
-
2019
- 2019-11-11 JP JP2019204141A patent/JP7433848B2/ja active Active
-
2020
- 2020-03-11 KR KR1020200030133A patent/KR20200110210A/ko not_active Application Discontinuation
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008205569A (ja) | 2007-02-16 | 2008-09-04 | Fujifilm Corp | 撮像装置及び方法 |
| JP2009015828A (ja) | 2007-06-06 | 2009-01-22 | Sony Corp | 画像処理装置、画像処理方法及び画像処理プログラム |
| JP2014155063A (ja) | 2013-02-08 | 2014-08-25 | Sharp Corp | 解像度測定用チャート、解像度測定方法、カメラモジュールにおける位置調整方法およびカメラモジュールの製造方法 |
| JP2015031754A (ja) | 2013-07-31 | 2015-02-16 | キヤノン株式会社 | 撮像装置及びその制御方法、情報処理装置及びその制御方法、及び、システム |
| US20150138383A1 (en) | 2013-11-21 | 2015-05-21 | International Business Machines Corporation | Automated tilt and shift optimization |
| JP2015102694A (ja) | 2013-11-25 | 2015-06-04 | オリンパス株式会社 | アライメント装置、顕微鏡システム、アライメント方法、及びアライメントプログラム |
| JP2017098613A (ja) | 2015-11-18 | 2017-06-01 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| JP2017134322A (ja) | 2016-01-29 | 2017-08-03 | キヤノン株式会社 | レンズ装置 |
| US20170272658A1 (en) | 2016-03-16 | 2017-09-21 | Ricoh Imaging Company, Ltd. | Photographing apparatus |
| JP2017173802A (ja) | 2016-03-16 | 2017-09-28 | リコーイメージング株式会社 | 撮影装置 |
| JP2018056810A (ja) | 2016-09-29 | 2018-04-05 | リコーイメージング株式会社 | 撮像装置及び撮像方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020154283A (ja) | 2020-09-24 |
| KR20200110210A (ko) | 2020-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2024040284A (ja) | 撮像装置、コンピュータプログラム、および撮像制御方法 | |
| EP3648450B1 (en) | Imaging apparatus | |
| US10009540B2 (en) | Image processing device, image capturing device, and image processing method for setting a combination parameter for combining a plurality of image data | |
| JP6512810B2 (ja) | 撮像装置および制御方法とプログラム | |
| JP6618255B2 (ja) | ズーム制御装置、撮像装置、ズーム制御装置の制御方法、ズーム制御装置の制御プログラム及び記憶媒体 | |
| US20140267869A1 (en) | Display apparatus | |
| US9462252B2 (en) | Single-eye stereoscopic imaging device, imaging method and recording medium | |
| JP6863284B2 (ja) | 検出装置、検出方法、検出プログラムおよび撮像装置 | |
| US8711274B2 (en) | Image processing apparatus and method configured to calculate defocus amount of designated area | |
| JP2013013050A (ja) | 撮像装置及びこの撮像装置を用いた表示方法 | |
| JP7433848B2 (ja) | 撮像装置、コンピュータプログラム、記憶媒体および撮像制御方法 | |
| US11582394B2 (en) | Control apparatus, control method, and storage medium for providing tilt control | |
| WO2016002355A1 (ja) | 撮影装置及び撮影方法 | |
| JP5936358B2 (ja) | 画像表示装置、画像表示方法、撮像装置およびその制御方法、プログラムおよびそれを記憶する記憶媒体 | |
| JP6833801B2 (ja) | 撮像装置、撮像方法、プログラムおよび記録媒体 | |
| JP7254562B2 (ja) | 撮像装置及びその制御装置 | |
| JP4582295B2 (ja) | 撮影装置及びそのプログラム | |
| JP6501536B2 (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| US11012629B2 (en) | Image capturing apparatus, control method for image capturing apparatus, and control program for image capturing apparatus | |
| JP2007133301A (ja) | オートフォーカスカメラ | |
| JP2021162829A (ja) | 焦点検出装置、撮像装置および焦点検出方法 | |
| JP6223502B2 (ja) | 画像処理装置、画像処理方法、プログラム、それを記憶した記憶媒体 | |
| JP2021019214A (ja) | 撮像装置、コンピュータプログラムおよび記憶媒体 | |
| JP7463078B2 (ja) | 撮像装置 | |
| JP2022128941A (ja) | 撮像装置、コンピュータプログラム、記憶媒体及び撮像装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240207 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7433848 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |