JP7399552B2 - Container transport device and laser processing device - Google Patents
Container transport device and laser processing device Download PDFInfo
- Publication number
- JP7399552B2 JP7399552B2 JP2019059799A JP2019059799A JP7399552B2 JP 7399552 B2 JP7399552 B2 JP 7399552B2 JP 2019059799 A JP2019059799 A JP 2019059799A JP 2019059799 A JP2019059799 A JP 2019059799A JP 7399552 B2 JP7399552 B2 JP 7399552B2
- Authority
- JP
- Japan
- Prior art keywords
- storage
- substrate
- magazine
- storage body
- transported
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 51
- 239000000758 substrate Substances 0.000 claims description 94
- 230000032258 transport Effects 0.000 claims description 34
- 238000000034 method Methods 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 5
- 238000011144 upstream manufacturing Methods 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 description 20
- 238000010586 diagram Methods 0.000 description 8
- 238000012546 transfer Methods 0.000 description 8
- 238000013519 translation Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000004378 air conditioning Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 235000012431 wafers Nutrition 0.000 description 1
Images





Landscapes
- Feeding Of Workpieces (AREA)
- Laser Beam Processing (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
本発明は、例えばレーザ加工装置に対して被加工体としての基板を供給し、加工後の基板を取り出すために、基板を搬送する収納体搬送装置及びレーザ加工装置に関する。 TECHNICAL FIELD The present invention relates to a storage body transport device and a laser processing device that transport a substrate, for example, to supply a substrate as a workpiece to a laser processing device and take out the processed substrate.
半導体、FPD(フラットパネルディスプレイ)、プリント配線板等の製造工場では、基板を複数枚収納する収納体(マガジン、カセット、キャリア、FOUP(Front Opening Unify Pod):ウエハ用のカセット等)を用いて基板を搬送する。工場ではAGV(Automated Guided Vehicle:無人搬送車)等を用いて、装置と装置の間、または同一装置内の複数の収納体のセット場所の間で収納体を搬送する。 In manufacturing factories for semiconductors, FPDs (flat panel displays), printed wiring boards, etc., storage bodies (magazines, cassettes, carriers, FOUPs (Front Opening Unify Pods): cassettes for wafers, etc.) are used to store multiple boards. Transport the board. In factories, AGVs (Automated Guided Vehicles) and the like are used to transport storage objects between devices or between locations where a plurality of storage objects are set within the same device.
例えば特許文献1には、加工装置に収納体を2つセットし、基板投入側の位置にセットした一方の収納体から基板を取出し、加工装置で基板を加工した後、基板搬出側の位置にセットした他方の収納体に基板を格納することが記載されている。また、加工装置の2つの位置間を、コンベアにて搬送する技術が知られている(特許文献2参照)。
For example, in
特許文献1に記載の構成では、基板投入側の位置にセットした一方の収納体が空になった際には、AGVがこの収納体を加工装置から受け取って基板搬出側の位置に移動する必要がある。しかしながら、以前にセットした他方の収納体が満載になるまで、一方の収納体を基板搬出側の位置に搬送することができないので、次の新しい収納体をセットすることができず、待ち時間が生じる。特に、複数の収納体に跨るロットの生産がある場合、空となった一方の収納体の一時保管と満載した他方の収納体の次工程への搬送と、一時保管した一方の収納体の基板搬出側の位置へのセットのために、AGVを度々占有され、また、AGVの導線が複雑になる問題がある。特許文献2の場合では、AGVを用いない収納体の搬送装置が示されているが、特許文献1に記載の構成で生じる収納体の搬送が煩雑になるという問題を解決することはできない。
In the configuration described in
したがって、本発明の目的は、収納体を効率よく搬送することができる収納体搬送装置及びレーザ加工装置を提供することにある。 Therefore, an object of the present invention is to provide a storage object transport device and a laser processing device that can efficiently transport storage objects.
本発明は、被加工層が形成された基板を複数収納可能な収納体を搬送し、設定された第1の位置乃至第4の位置にそれぞれ収納体を位置させる収納体搬送ユニットと、
第1の位置にある第1の収納体から取り出した基板を基板処理装置に搬送し、第1の位置の下流側に設定された第2の位置にある第2の収納体の中に基板処理装置から取り出した基板を格納する受け渡し装置とを備え、
第1の収納体から基板を基板処理装置に搬送する期間において、基板が収納された第3の収納体が第1の位置の上流側に設定された第3の位置に搬入され、
第2の収納体の中に基板処理装置から取り出した基板を格納する期間において、第2の位置の下流側に設定された第4の位置において、加工後の基板が収納された第4の収納体が収納体搬送ユニットから搬出され、
第2の収納体の中に基板処理装置から取り出した基板を格納する期間の後に、第2の収納体が第2の位置から第4の位置に搬送され、
第1の収納体から基板を基板処理装置に搬送する期間の後に、第1の収納体が第1の位置から第2の位置に搬送されると共に、第3の収納体が第3の位置から第1の位置に搬送される
ようにした収納体搬送装置である。
The present invention provides a storage body transport unit that transports a storage body capable of storing a plurality of substrates each having a processed layer formed thereon, and positions the storage bodies at a set first position to a fourth position, respectively;
The substrate taken out from the first storage body located at the first position is transported to the substrate processing apparatus, and the substrate is processed into the second storage body located at the second position set on the downstream side of the first position. and a delivery device for storing the board taken out from the device,
During the period of transporting the substrates from the first storage body to the substrate processing apparatus, a third storage body containing the substrates is carried into a third position set upstream of the first position,
During the period in which the substrates taken out from the substrate processing apparatus are stored in the second storage body, the fourth storage unit stores the processed substrates at a fourth position set on the downstream side of the second position. The body is removed from the storage body transport unit,
After a period of storing the substrate taken out from the substrate processing apparatus in the second storage body, the second storage body is transported from the second position to the fourth position,
After a period of transporting the substrate from the first storage body to the substrate processing apparatus, the first storage body is transported from the first position to the second position , and the third storage body is transported from the third position. transported to the first position
This is a container conveying device.
少なくとも一つの実施形態によれば、収納体を移動させるのに、移動先が空くのを待つ必要がなく、またAGVを利用せずに、収納体搬送ユニット内で収納体を移動させることができるので、生産性が向上する利点がある。なお、ここに記載された効果は必ずしも限定されるものではなく、本明細書に記載されたいずれかの効果又はそれらと異質な効果であっても良い。 According to at least one embodiment, it is not necessary to wait for a destination to become available in order to move the storage object, and the storage object can be moved within the storage object transport unit without using an AGV. Therefore, it has the advantage of improving productivity. Note that the effects described here are not necessarily limited, and may be any of the effects described in this specification or effects different from them.
以下、本発明の実施形態等について図面を参照しながら説明する。なお、以下に説明する実施形態等は本発明の好適な具体例であり、本発明の内容がこれらの実施形態等に限定されるものではない。 Embodiments of the present invention will be described below with reference to the drawings. Note that the embodiments described below are preferred specific examples of the present invention, and the content of the present invention is not limited to these embodiments.
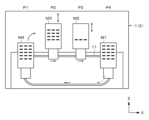
図1は本発明の第1実施形態の正面概略構成図である。また図2は第1実施形態の平面概略構成図である。第1実施形態では、レーザ加工装置1が、被加工層が形成された複数の基板が収納された収納体(以下、マガジンと適宜称する)を搬送する収納体搬送装置2を備えている。収納体搬送装置2には、収納体搬送ユニットとして、水平方向(X方向)に延長するガイドレール等のX方向直動機構10と、X方向直動機構10の移動部にマガジン係止ユニットHが設置されている。X方向直動機構1及びマガジン係止ユニットHは、空調チャンバー(収納体搬送装置2の外装フレーム)の天井部に吊り下げるように設けられている。但し、収納体搬送ユニットは、空調チャンバーの内側面や底面に取り付けるようにしてもよい。また、複数のマガジン係止ユニットを設けてもよい。
FIG. 1 is a schematic front configuration diagram of a first embodiment of the present invention. Further, FIG. 2 is a schematic plan configuration diagram of the first embodiment. In the first embodiment, a
マガジン係止ユニットHは、水平方向を左右(X軸方向)に移動自在可能とされ、また、その移動量及び停止位置が制御可能とされている。マガジン係止ユニットHの下方先端には、マガジン係止ユニットとマガジンを連結するためのクランプ機構Cが設けられている。クランプ機構CをZ方向(垂直方向)に移動させるためのZ方向直動機構をマガジン係止ユニットHが有する。クランプ機構Cによって、マガジン係止ユニットHとマガジンが連結される。この連結状態及び非連結状態が制御可能とされている。 The magazine locking unit H can be moved horizontally from side to side (X-axis direction), and its movement amount and stop position can be controlled. A clamp mechanism C for connecting the magazine locking unit and the magazine is provided at the lower end of the magazine locking unit H. The magazine locking unit H has a Z direction translation mechanism for moving the clamp mechanism C in the Z direction (vertical direction). The clamp mechanism C connects the magazine locking unit H and the magazine. This connected state and non-connected state can be controlled.
収納体搬送ユニットの下部にX方向に延長して配されたベースBが配置されている。ベースB上の複数箇所例えば4箇所にマガジン載置テーブルT1,T2,T3及びT4が取り付けられている。各マガジン載置テーブルT1~T4は、載置されるマガジンを位置決めするための位置決め機構を有する。 A base B extending in the X direction is disposed at the bottom of the storage object conveying unit. Magazine mounting tables T1, T2, T3, and T4 are attached to a plurality of locations on the base B, for example, four locations. Each magazine mounting table T1 to T4 has a positioning mechanism for positioning the magazine on which it is mounted.
マガジン載置テーブルT1及びT4の下側には、AGVの備えるフォークの逃げ溝2a,2bが設けられている。また、マガジン載置テーブルT2及びT3は、テーブル昇降機構3a,3bによって昇降自在とされている。
図1においては、マガジン載置テーブルT1~T4に対してマガジンM1,M2,M3及びM4がそれぞれ載置されている状態が示されている。各マガジンに対して破線で示すように、基板が間隔を空けて複数枚収納されている。基板は例えばプリント配線板用の有機基板であり、表面にレーザ加工をする被加工層が形成されている。被加工層は例えば、樹脂膜や金属箔であり、レーザによってビア形成等の加工処理が可能な材料によって形成されている。 In FIG. 1, magazines M1, M2, M3, and M4 are shown placed on magazine placement tables T1 to T4, respectively. A plurality of substrates are stored at intervals in each magazine, as shown by broken lines. The substrate is, for example, an organic substrate for a printed wiring board, and a layer to be processed by laser processing is formed on the surface. The layer to be processed is, for example, a resin film or a metal foil, and is formed of a material that can be processed such as via formation using a laser.
マガジン載置テーブルT1~T4のそれぞれの位置をP1,P2,P3及びP4と称する。位置P2は、第1の位置で、位置P3は、第2の位置である。第1の位置P2において、マガジンから取り出した加工前基板を、基板に対して処理(レーザビア加工処理、露光処理等)を行う基板処理装置(以降、加工装置と適宜称する)に搬送し、第2の位置P3において、加工装置から取り出した加工後基板をマガジンの中に格納するようになされる。さらに、第3の位置P1において、加工前基板が収納されたマガジンがAGVによって収納体搬送ユニット(マガジン載置テーブルT1)に搬送可能なように配される。さらに、第4の位置P4において、加工後の基板が収納されたマガジンがAGVによって収納体搬送ユニットから離脱するために待機するようになされる。
The respective positions of the magazine mounting tables T1 to T4 are referred to as P1, P2, P3 and P4. Position P2 is the first position and position P3 is the second position. At the first position P2, the unprocessed substrate taken out from the magazine is transported to a substrate processing device (hereinafter appropriately referred to as a processing device) that performs processing (laser via processing, exposure processing, etc.) on the substrate, and the second At position P3, the processed substrate taken out from the processing device is stored in the magazine. Further, at the third position P1, a magazine storing unprocessed substrates is arranged so as to be transportable by the AGV to the storage body transport unit (magazine mounting table T1). Furthermore, at the fourth position P4, the magazine in which processed substrates are stored is placed on standby for being removed from the container transport unit by the AGV.
図1に示すように、最大数のマガジンがセットされた状態においては、位置P1(マガジン載置テーブルT1)に加工前基板が収納されたマガジンM4がセットされ、位置P2(マガジン載置テーブルT2)に加工前基板が収納されたマガジンM3がセットされ、位置P3(マガジン載置テーブルT3)に加工後基板が収納される空のマガジンM2がセットされ、位置P4(マガジン載置テーブルT4)に加工後基板が収納されたマガジンM1がセットされる。 As shown in FIG. 1, in a state where the maximum number of magazines is set, magazine M4 containing unprocessed substrates is set at position P1 (magazine mounting table T1), and magazine M4 containing unprocessed substrates is set at position P2 (magazine mounting table T2). ) is set to the magazine M3 containing the substrate before processing, an empty magazine M2 containing the substrate after processing is set to the position P3 (magazine mounting table T3), and an empty magazine M2 containing the board after processing is set to the position P4 (magazine mounting table T4). A magazine M1 containing processed substrates is set.
第1の実施形態の動作について説明する。各マガジン載置テーブル上にマガジンが全くセットされていない初期状態では、位置P1(マガジン載置テーブルT1)に対してAGVによって加工後基板を収納するための空のマガジンM1がセットされる。
次に、マガジン係止ユニットHのクランプ機構CがマガジンM1の上部フックをクランプし、マガジン係止ユニットHのZ方向直動機構がZ+方向(上方向)に作動し、マガジンM1を持ち上げる。X方向直動機構1がX+方向に作動し、マガジンM1をマガジン載置テーブルT2上まで搬送する。マガジン係止ユニットHのZ方向直動機構がZ-方向(下方向)に作動し、マガジンM1をマガジン載置テーブルT2に載置する。このようにしてマガジンM1を位置P1から位置P2へ移動する。マガジン係止ユニットHのクランプ機構Cが解除され、マガジン係止ユニットHがZ方向直動機構によってZ+方向(上方向)に退避する。
The operation of the first embodiment will be explained. In an initial state in which no magazines are set on each magazine mounting table, an empty magazine M1 for storing processed substrates is set by the AGV at position P1 (magazine mounting table T1).
Next, the clamp mechanism C of the magazine locking unit H clamps the upper hook of the magazine M1, and the Z direction translation mechanism of the magazine locking unit H operates in the Z+ direction (upward) to lift the magazine M1. The X-direction
さらに、上述した動作と同様の動作によってマガジンM1を位置P2(マガジン載置テーブルT2)から位置P3(マガジン載置テーブルT3)まで搬送する。但し、他のマガジンが存在していない時には、マガジンM1を位置P1から位置P3まで搬送してもよい。 Furthermore, the magazine M1 is conveyed from position P2 (magazine mounting table T2) to position P3 (magazine mounting table T3) by the same operation as described above. However, when no other magazine exists, magazine M1 may be transported from position P1 to position P3.
次に、位置P1(マガジン載置テーブルT1)に加工前基板が収納されたマガジンM2をAGVによってセットし、そして、このマガジンM2を位置P2(マガジン載置テーブルT2)までマガジン係止ユニットHによって搬送する。したがって、位置P2に加工前基板が収納されたマガジンM2が位置し、位置P3に空のマガジンM1が位置した状態となる。 Next, the magazine M2 containing the substrate to be processed is set at position P1 (magazine mounting table T1) by the AGV, and this magazine M2 is moved to position P2 (magazine mounting table T2) by the magazine locking unit H. transport. Therefore, the magazine M2 storing unprocessed substrates is located at position P2, and the empty magazine M1 is located at position P3.
次に、受け渡し装置としての基板搬送ロボット13によってマガジンM2から加工前基板を取り出して加工装置例えばレーザ加工装置に投入する。例えば基板搬送ロボットがマガジンM2の上部開口から1枚ずつ基板を取り出して加工装置の加工ステージ(不図示)にセットする。
Next, the
加工装置により加工された加工後基板が基板搬送ロボット13によって1枚ごと順にマガジンM1に収納される。このように、基板搬送ロボット13は、位置P2にあるマガジンM2から基板を1枚取り出して加工装置の加工ステージ(不図示)にセットし、加工済みの基板を加工ステージから受取り、位置P3にあるマガジンM1に加工した基板を収納する。基板搬送ロボットは、周知の機構、例えば、スカラロボットと直動機構の組合せで構成される。
The processed substrates processed by the processing device are stored one by one in the magazine M1 by the
マガジンM2の加工前基板を加工装置に投入して加工を行っている間に、AGVによってマガジンM3が位置P1(マガジン載置テーブルT1)にセットされる。そして、加工後基板が収納されたマガジンM1が位置P3(マガジン載置テーブルT3)から位置P4(マガジン載置テーブルT4)に搬送される。そして、AGVによってマガジンM1が収納体搬送ユニットから取り出されて次の工程に搬送される。さらに、空となったマガジンM2が位置P2から位置P3に移動され、加工後基板の収納開始を待機する。さらに、マガジンM3が位置P1(マガジン載置テーブルT1)から位置P2(マガジン載置テーブル2)に移動し、加工前基板の取り出しを待機する。 While the unprocessed substrates of the magazine M2 are loaded into the processing device and processed, the magazine M3 is set at position P1 (magazine mounting table T1) by the AGV. Then, the magazine M1 storing the processed substrates is transported from the position P3 (magazine mounting table T3) to the position P4 (magazine mounting table T4). Then, the magazine M1 is taken out from the storage body conveyance unit by the AGV and conveyed to the next process. Furthermore, the empty magazine M2 is moved from position P2 to position P3, and waits for the start of storing processed substrates. Further, the magazine M3 moves from position P1 (magazine mounting table T1) to position P2 (magazine mounting table 2) and waits for removal of the unprocessed substrate.
マガジンM3の加工前基板を加工装置に投入して加工を行っている間に、AGVによってマガジンM4が位置P1(マガジン載置テーブルT1)にセットされる。図1は、マガジンM1をAGVによって取り出す前の状態を示している。
以上の処理の流れを概略的に図示したものが図3A、図3B及び図3Cである。
While the unprocessed substrates of the magazine M3 are put into the processing device and processed, the magazine M4 is set at the position P1 (magazine mounting table T1) by the AGV. FIG. 1 shows the state before the magazine M1 is taken out by the AGV.
3A, 3B, and 3C schematically illustrate the flow of the above processing.
上述した第1の実施形態によれば、収納体としてのマガジンを移動させるのに、移動先が空くのを待つ必要がなく、またAGVを利用せずに、収納体搬送ユニット内でマガジンを移動させることができるので、生産性が向上する利点がある。 According to the first embodiment described above, there is no need to wait for a destination to become vacant in order to move a magazine as a storage object, and the magazine can be moved within the storage object transport unit without using an AGV. This has the advantage of improving productivity.
本発明の第2の実施形態について図4を参照して説明する。図4に示すように、マガジンをX方向に搬送するために、ローラチェーン、ベルトコンベア等の収納体搬送ユニット11が使用される。収納体搬送ユニット11は、第1の実施形態と同様に、P1~P4の位置にマガジンを搬送することが可能とされている。また、マガジンをZ方向に変位させることが可能とされている。
A second embodiment of the present invention will be described with reference to FIG. As shown in FIG. 4, a
かかる第2の実施形態によっても、マガジンを移動させるのに、移動先が空くのを待つ必要がなく、またAGVを利用せずに、収納体搬送ユニット内でマガジンを移動させられるので、生産性が向上する利点がある。 According to the second embodiment, there is no need to wait for a destination to become vacant in order to move a magazine, and the magazine can be moved within the storage object transport unit without using an AGV, so productivity can be improved. This has the advantage of improving
図5は、収納体搬送ユニットの変形例の平面図である。マガジンのセット位置P1と、加工位置P2の間を半円状の搬送経路で結び、加工後の基板を収納する基板収納位置P3と、マガジンが離脱のためにAGVを待機する位置P4の間を半円状の搬送経路で結んだ構成である。さらに、円形状に搬送経路を構成してもよい。 FIG. 5 is a plan view of a modified example of the storage object transport unit. A semicircular conveyance path connects the magazine set position P1 and the processing position P2, and connects the board storage position P3, where the processed board is stored, and the position P4, where the magazine waits for the AGV for removal. It has a configuration in which they are connected by a semicircular conveyance path. Furthermore, the conveyance path may be configured in a circular shape.
さらに、収納体搬送ユニットの経路は、水平(X)方向に限定されず、垂直(Z)方向に延長するものであってもよい。例えば図6の収納体搬送ユニットの変形例の正面図に示すように、位置P1と位置P2間の経路が上方向に延びるものであり、位置P2及び位置P3を結ぶ経路が水平方向に延びるものであり、位置P3及び位置P4を結ぶ経路が下方向に延びるものであってもよい。 Furthermore, the path of the container transport unit is not limited to the horizontal (X) direction, but may extend in the vertical (Z) direction. For example, as shown in the front view of a modified example of the container transport unit in FIG. 6, the path between position P1 and position P2 extends upward, and the path connecting position P2 and position P3 extends horizontally. , and the path connecting position P3 and position P4 may extend downward.
以上の説明では、位置P1から位置P4の4個の位置を設定しているが、位置P1と位置P2を同一位置とするか、又は位置P3と位置P4を同一位置として合計3箇所の位置を設定するようにしてもよい。さらに、合計2箇所の位置としてもよい。また、位置P2及びP3の間に、空マガジンを待機するための位置を設けて全部で5カ所の位置としてもよい。 In the above explanation, four positions from position P1 to position P4 are set, but it is possible to set position P1 and position P2 as the same position, or position P3 and position P4 as the same position, and set a total of three positions. You may also set it. Furthermore, it may be located at two locations in total. Alternatively, a position for waiting an empty magazine may be provided between the positions P2 and P3 for a total of five positions.
以上、本発明の実施形態について具体的に説明したが、本発明は、上述の実施形態に限定されるものではなく、本発明の技術的思想に基づく各種の変形が可能である。また、上述の実施形態において挙げた構成、方法、工程、形状、材料及び数値などはあくまでも例に過ぎず、必要に応じてこれと異なる構成、方法、工程、形状、材料及び数値などを用いてもよい。 Although the embodiments of the present invention have been specifically described above, the present invention is not limited to the above-described embodiments, and various modifications can be made based on the technical idea of the present invention. Furthermore, the configurations, methods, processes, shapes, materials, numerical values, etc. mentioned in the above-mentioned embodiments are merely examples, and different configurations, methods, processes, shapes, materials, numerical values, etc. may be used as necessary. Good too.
10・・・X方向直動機構、2・・・収納体搬送装置、3a,3b・・・Z方向直動機構、H・・・マガジン係止ユニット、C・・・クランプ機構、M1~M4・・・マガジン、T1~T4・・・マガジン載置テーブル、P1~P4・・・位置、11・・・収納体搬送ユニット、12・・・加工装置、13・・・基板搬送ロボット 1 0 ...X direction linear motion mechanism, 2...Storage body conveyance device, 3a, 3b...Z direction linear motion mechanism, H...Magazine locking unit, C...Clamp mechanism, M1~ M4...Magazine, T1-T4...Magazine mounting table, P1-P4...Position, 11...Storage body transfer unit, 12...Processing device, 13...Substrate transfer robot
Claims (4)
前記第1の位置にある第1の収納体から取り出した前記基板を基板処理装置に搬送し、前記第1の位置の下流側に設定された前記第2の位置にある第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する受け渡し装置とを備え、
前記第1の収納体から前記基板を前記基板処理装置に搬送する期間において、前記基板が収納された第3の収納体が前記第1の位置の上流側に設定された第3の位置に搬入され、
前記第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する期間において、前記第2の位置の下流側に設定された第4の位置において、加工後の前記基板が収納された第4の収納体が前記収納体搬送ユニットから搬出され、
前記第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する期間の後に、前記第2の収納体が前記第2の位置から前記第4の位置に搬送され、
前記第1の収納体から前記基板を前記基板処理装置に搬送する期間の後に、前記第1の収納体が前記第1の位置から前記第2の位置に搬送されると共に、前記第3の収納体が前記第3の位置から前記第1の位置に搬送される
ようにした収納体搬送装置。 a storage body transport unit that transports a storage body capable of storing a plurality of substrates each having a processed layer formed thereon, and positions the storage bodies at a set first position to a fourth position, respectively;
The substrate taken out from the first storage body located at the first position is transported to a substrate processing apparatus, and the substrate is transferred to a second storage body located at the second position set on the downstream side of the first position. a delivery device for storing the substrate taken out from the substrate processing device therein;
During a period of transporting the substrates from the first storage body to the substrate processing apparatus, a third storage body containing the substrates is transported to a third position set upstream of the first position. is,
During a period in which the substrate taken out from the substrate processing apparatus is stored in the second storage body, the processed substrate is stored in a fourth position set downstream of the second position. the fourth storage body is carried out from the storage body conveyance unit,
After a period of storing the substrate taken out from the substrate processing apparatus in the second storage, the second storage is transported from the second position to the fourth position,
After a period of transporting the substrate from the first storage to the substrate processing apparatus, the first storage is transported from the first position to the second position , and the third storage a body is transported from the third location to the first location
A storage object conveying device.
被加工層が形成された基板を複数収納可能な収納体を搬送し、設定された第1の位置乃至第4の位置にそれぞれ前記収納体を位置させる収納体搬送ユニットと、
前記第1の位置にある第1の収納体から取り出した前記基板を基板処理装置に搬送し、前記第1の位置の下流側に設定された前記第2の位置にある第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する受け渡し装置とを備え、
前記第1の収納体から前記基板を前記基板処理装置に搬送する期間において、前記基板が収納された第3の収納体が前記第1の位置の上流側に設定された第3の位置に搬入され、
前記第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する期間において、前記第2の位置の下流側に設定された第4の位置において、加工後の前記基板が収納された第4の収納体が前記収納体搬送ユニットから搬出され、
前記第2の収納体の中に前記基板処理装置から取り出した前記基板を格納する期間の後に、前記第2の収納体が前記第2の位置から前記第4の位置に搬送され、
前記第1の収納体から前記基板を前記基板処理装置に搬送する期間の後に、前記第1の収納体が前記第1の位置から前記第2の位置に搬送されると共に、前記第3の収納体が前記第3の位置から前記第1の位置に搬送される
ようにしたレーザ加工装置。
a substrate processing device that processes a substrate with a laser beam;
a storage body transport unit that transports a storage body capable of storing a plurality of substrates each having a processed layer formed thereon, and positions the storage bodies at a set first position to a fourth position, respectively;
The substrate taken out from the first storage body located at the first position is transported to a substrate processing apparatus, and the substrate is transferred to a second storage body located at the second position set on the downstream side of the first position. a delivery device for storing the substrate taken out from the substrate processing device therein;
During a period of transporting the substrates from the first storage body to the substrate processing apparatus, a third storage body containing the substrates is transported to a third position set upstream of the first position. is,
During a period in which the substrate taken out from the substrate processing apparatus is stored in the second storage body, the processed substrate is stored in a fourth position set downstream of the second position. the fourth storage body is carried out from the storage body conveyance unit,
After a period of storing the substrate taken out from the substrate processing apparatus in the second storage, the second storage is transported from the second position to the fourth position,
After a period of transporting the substrate from the first storage to the substrate processing apparatus, the first storage is transported from the first position to the second position , and the third storage a body is transported from the third location to the first location
A laser processing device designed to
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019059799A JP7399552B2 (en) | 2019-03-27 | 2019-03-27 | Container transport device and laser processing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019059799A JP7399552B2 (en) | 2019-03-27 | 2019-03-27 | Container transport device and laser processing device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020161654A JP2020161654A (en) | 2020-10-01 |
| JP7399552B2 true JP7399552B2 (en) | 2023-12-18 |
Family
ID=72639921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019059799A Active JP7399552B2 (en) | 2019-03-27 | 2019-03-27 | Container transport device and laser processing device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7399552B2 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000272750A (en) | 1999-03-25 | 2000-10-03 | Olympus Optical Co Ltd | Carrying device |
| JP2001308160A (en) | 2001-03-08 | 2001-11-02 | Dainippon Screen Mfg Co Ltd | Substrate processing equipment |
| JP2005103685A (en) | 2003-09-29 | 2005-04-21 | Canon Sales Co Inc | Apparatus for carrying board, and laser machining apparatus |
| JP2011059927A (en) | 2009-09-09 | 2011-03-24 | Dainippon Screen Mfg Co Ltd | Method of preparing schedule of substrate processing apparatus and program thereof |
| JP2012160758A (en) | 2012-05-14 | 2012-08-23 | Apic Yamada Corp | Semiconductor cutting apparatus and semiconductor cutting method |
| JP2018098363A (en) | 2016-12-13 | 2018-06-21 | 株式会社ディスコ | Laser processing equipment |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4824310A (en) * | 1985-09-04 | 1989-04-25 | Kosmowski Wojciech B | Automated work-piece handling system for machine tool |
| JPH04249320A (en) * | 1991-02-05 | 1992-09-04 | Mitsubishi Electric Corp | Transport system of automatic cleaning apparatus |
| JPH04313212A (en) * | 1991-04-04 | 1992-11-05 | Mitsubishi Electric Corp | Conveyance apparatus for semiconductor wafer |
| JPH05217975A (en) * | 1992-01-08 | 1993-08-27 | Nec Corp | Semiconductor wet processor |
-
2019
- 2019-03-27 JP JP2019059799A patent/JP7399552B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000272750A (en) | 1999-03-25 | 2000-10-03 | Olympus Optical Co Ltd | Carrying device |
| JP2001308160A (en) | 2001-03-08 | 2001-11-02 | Dainippon Screen Mfg Co Ltd | Substrate processing equipment |
| JP2005103685A (en) | 2003-09-29 | 2005-04-21 | Canon Sales Co Inc | Apparatus for carrying board, and laser machining apparatus |
| JP2011059927A (en) | 2009-09-09 | 2011-03-24 | Dainippon Screen Mfg Co Ltd | Method of preparing schedule of substrate processing apparatus and program thereof |
| JP2012160758A (en) | 2012-05-14 | 2012-08-23 | Apic Yamada Corp | Semiconductor cutting apparatus and semiconductor cutting method |
| JP2018098363A (en) | 2016-12-13 | 2018-06-21 | 株式会社ディスコ | Laser processing equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020161654A (en) | 2020-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5088468B2 (en) | Conveying system using a suspended conveying cart | |
| US11515189B2 (en) | Automatic handling buffer for bare stocker | |
| US9299597B2 (en) | Scalable stockers with automatic handling buffer | |
| CN112786504B (en) | Substrate processing device and substrate storage container storage method | |
| KR20200100982A (en) | Stockr unit and apparatus for transferring articles having the same | |
| US20090022575A1 (en) | Article storing apparatus | |
| KR20170051641A (en) | Apparatus for loading substrate storage container | |
| JP2002544662A (en) | Equipment for manufacturing semiconductor products | |
| EP1845552B1 (en) | Transportation system and transportation method | |
| KR102294887B1 (en) | Apparatus for transferring articles | |
| CN116354086B (en) | Transmission device and transmission method | |
| JP2004303916A (en) | Apparatus and method for conveying object to be manufactured | |
| WO2013150841A1 (en) | Conveyance system | |
| JP7399552B2 (en) | Container transport device and laser processing device | |
| JP2010241547A (en) | Traveling vehicle system | |
| JP2008019017A (en) | Article storage device | |
| JP2005136294A (en) | Transfer apparatus | |
| KR102166348B1 (en) | Method of controlling operations of transport apparatus | |
| JP2004319889A (en) | Manufacturing object delivery apparatus and manufacturing object delivery method | |
| CN212322971U (en) | semiconductor process system | |
| KR102909727B1 (en) | Stocker and apparatus for transferring carrier having the same | |
| KR102181492B1 (en) | Method of controlling operations of transport apparatus | |
| KR20100113625A (en) | Auto Handling Buffer for Bare Stockers | |
| JP2009035414A (en) | Transport system between different levels | |
| JP2024034913A (en) | Goods conveyance equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7399552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |