JP7309600B2 - マルチコプターの離着陸装置 - Google Patents
マルチコプターの離着陸装置 Download PDFInfo
- Publication number
- JP7309600B2 JP7309600B2 JP2019237908A JP2019237908A JP7309600B2 JP 7309600 B2 JP7309600 B2 JP 7309600B2 JP 2019237908 A JP2019237908 A JP 2019237908A JP 2019237908 A JP2019237908 A JP 2019237908A JP 7309600 B2 JP7309600 B2 JP 7309600B2
- Authority
- JP
- Japan
- Prior art keywords
- multicopter
- state
- plate members
- deployment
- deployed state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 24
- 239000000126 substance Substances 0.000 description 8
- 239000007788 liquid Substances 0.000 description 6
- 238000005507 spraying Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 239000003337 fertilizer Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000036544 posture Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 239000003905 agrochemical Substances 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000012895 dilution Substances 0.000 description 2
- 238000010790 dilution Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000010899 nucleation Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 239000000575 pesticide Substances 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F1/00—Ground or aircraft-carrier-deck installations
- B64F1/12—Ground or aircraft-carrier-deck installations for anchoring aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Agricultural Machines (AREA)
- Soil Working Implements (AREA)
Description
そこで、本発明は上記問題点に鑑み、搬送時の障害物等への接触を抑制しつつ、マルチコプターが離着陸可能な大きさを確保できる離着陸装置を提供することを目的とする。
マルチコプターの離着陸装置は、機枠と、前記機枠に搭載された展開構造体であって、複数の板材を有し且つ前記複数の板材を展開していない非展開状態と、前記複数の板材を展開して前記非展開状態よりも平面視領域が大きい展開状態とに変更可能な展開構造体と、前記展開構造体を前記機枠に対して第1位置から第2位置にスライドさせるスライドステーと、を備え、前記展開構造体は、前記展開状態における平面視領域の大きさがマルチコプターの離着陸が可能な大きさに設定され、前記複数の板材を前記非展開状態において前記板材の厚み方向に重ねて支持し、前記複数の板材を前記展開状態において前記複数の板材のそれぞれを前記厚み方向と直交する方向に展開にして支持し、前記複数の板材は、同一の軸が貫通することによって枢支されており、厚み方向に重なった前記非展開状態から前記同一の軸回りに回転することにより前記展開状態とすることができ、前記展開構造体は、前記第1位置にあるとき前記非展開状態とされ、前記第2位置にあるとき前記展開状態とすることができ、前記展開構造体を前記第1位置から前記第2位置にスライドさせることにより、前記軸が移動して前記複数の板材が前記軸回りに回転するスペースが確保されて前記展開構造体を前記展開状態とすることができる。
前記機枠は、前記マルチコプターを充電可能な発電機を少なくとも積載する積載スペースを備えている。
前記機枠は、作業車両に連結される連結部を備え、前記連結部は、前記展開状態において前記マルチコプターが離着陸する平面視領域を水平に調整する調整機構を介して前記作業車両に連結される。
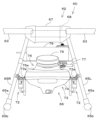
図1及び図2は、マルチコプター60の離着陸等の作業を行うことができる作業機1を示している。作業機1は、作業車両2と、作業車両2の後部に装着された離着陸装置20とを備えている。
図1に示す作業機1では、作業車両2は農業機械の一つであるトラクタ2である。トラクタ2には、離着陸装置20を装着可能な連結機構10が設けられている。本実施形態の場合、連結機構10は、トラクタ2の後部に設けられた3点リンク機構である。図15に示すように、3点リンク機構は、トップリンク10aと、左側及び右側のロアリンク10bと、左側及び右側のリフトアーム10cと、左側及び右側のリフトロッド10dと、左側及び右側のリフトシリンダ10eを有する。左側のロアリンク10bは、左側のリフトシリンダ10eの駆動によって揺動(昇降)可能である。右側のロアリンク10bは、右側のリフトシリンダ10eの駆動によって揺動(昇降)可能である。離着陸装置20は、当該離着陸装置20に設けられた連結部30を介して、トラクタ2の連結機構10に対して着脱自在に装着される。離着陸装置20は、トラクタ2に牽引されて移動することができる。
尚、作業車両2は、トラクタ及びトラックには限定されず、他の種類の作業車両であってもよい。
以下に説明する実施形態において、作業車両2の運転席7(図2では不図示)に着座した運転者の前側(図1及び図2の左側)を前方、運転者の後側(図1及び図2の右側)を後方、運転者の左側(図1及び図2の手前側)を左方、運転者の右側(図1及び図2の奥側)を右方として説明する。また、作業車両2の前後方向に直交する方向である水平方向を車両幅方向として説明する。また、車両幅方向の中央部から右部、或いは、左部へ向かう方向を幅方向外方として説明する。言い換えれば、幅方向外方とは、車両幅方向であって車両幅方向の中央部から離れる方向のことである。
トラクタ(作業車両)2は、車体3と、車体3の前部に装着された前輪5と、車体3の後部に装着された後輪6とを有する。車体3は、原動機(エンジン)4、クラッチを有するクラッチハウジング、変速装置を有するミッションケース11、作動装置を有するデフケース等を直結して構成されている。運転席7は、車体3の後部に設けられている。運転席7の前方には、ステアリングホイール8が設けられている。車体3の後部には、動力取出し用のPTO軸9、連結機構10、油圧取出し部(図示せず)が装備されている。
離着陸装置20は、マルチコプター60を離着陸させたり、離着陸させる際の支援を行ったりするための装置である。
図1、図2に示すように、離着陸装置20は、機枠21と、機枠21に搭載された展開構造体22を備えている。また、図1~図10に示すように、離着陸装置20は、展開構造体22を、機枠21に対してスライドさせるスライドステー23を備えている。
また、図10、図14に示すように、離着陸装置20は、展開状態Yの展開構造体22に装着可能な拡張部材24を備えている。
図1、図2及び図11~図13に示すように、マルチコプター60は、複数の回転翼により無人で飛行可能な回転翼機であって、例えば、ドローンと呼ばれる飛行体である。マルチコプター60は、無線または有線通信による遠隔操作により飛行するものであってもよいし、遠隔装置に依らずに自律制御により飛行するものであってもよい。
まず、機体61について説明する。機体61は、本体62と、アーム63と、回転翼64と、スキッド(脚部)65を有する。
本体62の形状(外形)は、本実施形態の場合、略直方体形であるが、円板形等の他の形状であってもよい。本体62は、ケース67(以下、「第1ケース67」という)と、電装品68(以下、「第1電装品68」という)と、を備えている。
第1電装品68は、マルチコプター60の飛行に関する制御を行う電装品であって、例えば、GPSアンテナ、制御装置90、各種センサ(ジャイロセンサ、加速度センサ等)等である。
回転翼64は、マルチコプター60が飛行するための揚力を発生させる。回転翼64は、ロータ69及びブレード(プロペラ)70から構成されている。ロータ69は、電動モータ(DCモータ等)から構成されている。ロータ69は、後述するバッテリ71から供給される電力により駆動される。ロータ69の回転軸の上部には、ブレード70が取り付けられている。隣り合う回転翼64は、互いに逆方向に回転する。回転翼64の数は、特に限定はされず、必要な揚力等に応じて変更することができる。例えば、マルチコプター60は、3つの回転翼64を有するトリコプターであってもよいし、4つの回転翼64を有するクアッドコプターであってもよいし、6つの回転翼64を有するヘキサコプターであってもよいし、8つの回転翼64を有するオクトコプターであってもよい。
次に、作業装置66について説明する。
作業装置66は、農業に関する作業を行う装置である。作業装置66としては、例えば、農場に農薬等の薬剤や希釈薬剤、肥料など液体(散布物)を散布する散布装置、農場を撮影する撮像装置(カメラ)、農場の温度を検知する温度センサ(赤外線センサ等)、農場の色(農作物の色)を検知する色センサ等のセンサ装置等が例示できる。
図1、図2及び図11~図13に示すように、飛行体タンク73は、本体62の下方に設けられたタンク装着部72に装着される。飛行体タンク73は、タンク装着部72に対して着脱可能である。なお、飛行体タンク73は、タンク装着部72に対して一体成形されていてもよい。タンク装着部72は、断面L字形状のレールである。タンク装着部72には、飛行体タンク73の側方から幅方向外方に向かって夫々突出した被装着部73aが懸架される。図13において、飛行体タンク73の装着状態を実線で示し、飛行体タンク73をタンク装着部72から離脱させる方向(矢印Bで示す)にスライド移動させた状態を仮想線で示している。
容器74は、農場に散布される液体が収容される内部空間を形成している。液体は、例えば、農薬等の薬剤や希釈薬剤、肥料、水などである。容器74は、当該容器74の上面に、液体を内部空間に供給するための供給部76を有する。供給部76は、容器74の上面から円筒状に突出する筒状体76aを有する。筒状体76aには、蓋75がネジ等により着脱可能に装着される。なお、飛行体タンク73に収容されている薬剤や希釈薬剤、肥料、水などは飛行体タンク73からポンプ77に供給される。
図11に示すように、マルチコプター60は制御装置90と、高度検出装置91と、を有する。制御装置90は、CPUや記憶部90aに記憶(保存)されているプログラム等から構成され、マルチコプター60に関する様々な制御を行う。具体的には、制御装置90は、例えば、ロータ69の回転を制御する。制御装置90は、記憶部90aを有する。記憶部90aは、不揮発性のメモリ等であって、マルチコプター60の情報を含む様々な情報を記憶する。
図1~図10に示すように、機枠21は、展開構造体22、スライドステー23、積載スペース27を構成する構造体(箱体)、連結部30等を支持する枠材であって、脚部材28が設けられている。機枠21は、前枠材31と、前枠材31の左端に接続された左枠材32Lと、前枠材31の右端部に接続された右枠材32Rと、左枠材32Lと右枠材32Rの後端部同士を接続する後枠材33とを有する。なお、機枠21は、後枠材33を有していないものであってもよい。本実施形態の場合、機枠21の平面視形状は、略四角形状であるが、略六角形状、略円形状等であってもよく、特に限定はされない。機枠21は、前枠材31、左枠材32L、右枠材32R及び後枠材33の下面が、板材に覆われていてもよい。
図1~図8及び図14は、第1実施形態の展開構造体22(221)を示している。第1実施形態の展開構造体22(221)は、複数の板材34を有する。第1実施形態の展開構造体22(221)は、複数の板材34を、展開していない非展開状態X(X1)(図3参照)と、複数の板材34を展開して非展開状態X1よりも平面視領域Z(Z1)が大きい展開状態Y(Y1)(図4参照)とに変更可能な構造体である。
展開構造体221は、複数の板材34を、非展開状態X1において板材34の厚み方向に重ねて支持し、展開状態Y1において複数の板材34のそれぞれを板材34の厚み方向と直交する方向(水平方向)に展開して支持する。板材34の厚み方向と直交する方向は、例えば、板材34の幅方向である。
また、図示していないが、複数の板材34は、それぞれ長孔を有し、各長孔に機枠21に取り付けられた同一の軸34aが挿通されている構成であってもよい。この構成では、各板材34は、軸34aが長孔に沿って相対的に移動することにより互いにスライドして展開可能である。この場合、上記「板材34の厚み方向と直交する方向に展開」は、「板材34の長孔に沿った移動による展開」と言い換えることができる。
また、上述した展開構造体221は、機枠21に対して着脱自在であってもよい。
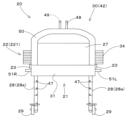
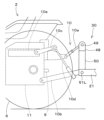
図9及び図10等に示すように、第2実施形態の展開構造体22(222)を示している。第2実施形態の展開構造体22(222)は、複数の板材36~39を有する。第2実施形態の展開構造体22(222)は、複数の板材36~39を、展開していない非展開状態X(X2)(図9参照)と、展開して非展開状態X2よりも平面視領域Z(Z2)が大きい展開状態Y(Y2)(図10参照)とに変更可能な構造体である。展開構造体222は、展開状態Y2における平面視領域Z2の大きさがマルチコプター60の離着陸が可能な大きさに設定される。
図10に示すように、底板材36の上面には、取手などの固定部43を設けることができる。この固定部43に、フックやバンド等を介して、マルチコプター60を固定することができる。固定部43は、後述する上蓋40の上面に設けてもよい。また、底板材36の上面には、マルチコプター60が着陸時にカメラ等により画像認識することができるマーク(Hマークなど)が描かれていてもよい。
本実施形態の場合、収納箱35を構成する展開構造体222は、スライドステー23を介して、機枠21の上側に取り付けられているが、スライドステー23を介さず、直接機枠21の上側に取り付けられていてもよい。また、展開構造体222は、機枠21に対して着脱自在であってもよい。
図1~図10に示すように、スライドステー23は、展開構造体22(221、222)を、機枠21に対してスライドさせる部材である。展開構造体22(221、222)は、スライドステー23と共に機枠21に対して前後方向にスライドすることができる。
スライドステー23は、左右一対の部材から構成されている。具体的には、スライドステー23は、機枠21の左枠材32Lに対してスライド可能な左側の部材と、右枠材32Rに対してスライド可能な右側の部材によって構成されている。本実施形態の場合、スライドステー23は、左枠材32L及び右枠材32Rにそれぞれ上側から被さってスライド可能な断面略U字状の部材である。但し、スライドステー23は、左枠材32L及び右枠材32Rをそれぞれ外側から囲ってスライド可能な断面略矩形状の部材や、レール溝等が形成された左枠材32L及び右枠材32R内にそれぞれスライド可能に入れられたランナー状の部材などであってもよい。また、スライドステー23は、機枠21に対して着脱自在であってもよい。
スライドステー23が位置固定部材23aによって固定される位置は、少なくとも機枠21の前方寄りの位置と後方寄りの位置である。スライドステー23が機枠21の前方寄りの位置にあるとき、展開構造体22は非展開状態Xとなる(図3、図9参照)。スライドステー23が機枠21の後方寄りの位置にあるとき、展開構造体22は展開状態Y(図4、図10参照)となる。
図10及び図14に示すように、拡張部材24は、展開状態Yにおいて展開構造体22に装着可能であって、展開構造体22に装着した装着状態でマルチコプター60が離着陸する平面視領域Zを拡張する部材である。
拡張部材24は、展開構造体22を展開状態Yにしたときの複数の板材のうち、隣接する板材の間に装着可能な板体(以下、「第1板体41」という)である。また、拡張部材24は、展開構造体22に装着され且つ折り畳み可能な複数の板材等であってもよい。
図1、図2及び図5~図7に示すように、発電機26は、積載スペース27に積載されている。具体的には、発電機26は、積載スペース27を構成する箱体に収容されている。発電機26は、マルチコプター60のバッテリ71を充電可能な機器である。
図1、図2、図5~図7、図9及び図10に示すように、積載スペース27は、少なくとも発電機26を積載するスペースである。
積載スペース27は、機枠21の前部に設けられ、上方開口した略直方体状の構造体(箱体)により構成されている。積載スペース27の前部は、機枠21の前枠材31の上面に設けられている。積載スペース27の前後方向中途部から後部にかけての左右端部は、機枠21の左枠材32L及び右枠材32Rの前部から中途部にかけての上面に設けられている。積載スペース27を構成する箱体は、着脱可能な蓋体を有していてもよい。積載スペース27を構成する箱体は、その内部に仕切が設けられていてもよい。積載スペース27を構成する箱体は、その前面によって連結部30の中央ブラケットを後方から支持してもよい。積載スペース27は、発電機26以外に、農薬等の薬剤、希釈薬剤、肥料、水などの液体を貯留する予備タンクや、農作業具、工具など、その他の付属品を積載することができる。
図1、図2及び図5~図8に示すように、脚部材28は、機枠21の下部に取り付けられている。本実施形態の場合、脚部材28は、伸縮可能で且つ機枠21に対して着脱可能な部材である。但し、脚部材28は、長さが一定の部材でもよいし、機枠21に対して着脱不能な部材であってもよい。また、図示したものよりも短い部材であってもよい。
図1、図2及び図5~図8に示すように、キャスタ29は、脚部材28の下端部に設けられている。
キャスタ29は、脚部材28の下端部に対して、板材(ブラケット)を介して、首振り可能(自在式)または首振り不可能(固定式)に取り付けられている。キャスタ29は、例えば、単輪式、双輪式、球体式などの構造を有する。
尚、キャスタ29は、機枠21の下部に直接取り付けられていてもよい。この場合、脚部材28は省略される。
図1、図2及び図5~図10に示すように、連結部30は、離着陸装置20の前部に設けられている。連結部30は、作業車両2の後部に設けられる連結機構10(3点リンク機構等)に連結される部分である。
図7~図10等に示すように、連結部30は、中央ブラケット48と、この中央ブラケット48の上端部に設けられた中央孔49と、中央ブラケット48を支える前アーチ50と、左右の端軸51L、51Rを有する。
左右の端軸51L、51Rは、機枠21の前枠材31の前部に設けられている。端軸51L、51Rは、前枠材31の幅方向外方の面(左右外方面)における前部からそれぞれ幅方向外方(左右外方)に突出している。端軸51L、51Rは、その軸心方向が車両幅方向(左右方向)を向いている。左右の端軸51L、51Rの先端部には貫通孔が設けられている。
中央ブラケット48は、中央孔49を介して連結機構10のトップリンク10aに連結することができる。端軸51L、51Rは、連結機構10のロアリンク10bに連結することができる。これにより、連結部30を作業車両2の連結機構10(3点リンク機構)に連結することができる。連結部30を作業車両2の連結機構10に連結した状態において、当該連結機構10を操作する(3点リンク機構の左側と右側のロアリンク10bの高さを個別に調整する)ことにより、マルチコプター60が離着陸する平面視領域Zを水平に調整することができる。つまり、作業車両2の連結機構10は、展開構造体22の展開状態Yにおいてマルチコプター60が離着陸する平面視領域Zを水平に調整する調整機構42を構成している。連結部30を構成する中央ブラケット48、中央孔49、前アーチ50及び左右の端軸51L、51Rは、調整機構42を構成する連結機構10を介して作業車両2に連結される。
上記したマルチコプターの離着陸装置20によれば、以下の効果を奏する。
離着陸装置20は、機枠21と、機枠21に搭載された展開構造体22であって、複数の板材を有し且つ複数の板材を展開していない非展開状態Xと、複数の板材を展開して非展開状態Xよりも平面視領域Zが大きい展開状態Yとに変更可能な展開構造体22を備え、展開構造体22は、展開状態Yにおいて平面視領域Zの大きさがマルチコプター60の離着陸可能な大きさに設定される。
また、展開構造体22(221)は、複数の板材34を非展開状態X(X1)において板材34の厚み方向に重ねて支持し、複数の板材34を展開状態Y(Y1)において複数の板材34のそれぞれを板材34の厚み方向と直交する方向に展開にして支持する。
また、展開構造体22(222)は、複数の板材36~39を非展開状態X(X2)において複数の板材36~39を組み合わせて立体構造に形成し、展開状態Y(Y2)において立体構造を展開して複数の板材36~39を平面状に形成する。
また、展開構造体22(222)は、立体構造において、マルチコプター60を収納する収納箱35を形成する。
また、離着陸装置20は、展開構造体22を、機枠21に対してスライドさせるスライドステー23を備えている。
この構成によれば、マルチコプター60の離着陸時には、拡張部材24を展開構造体22に装着することによって、マルチコプター60の離着陸のために十分に広い面積をもつ平面視領域Zを確保できる。また、離着陸装置20の搬送時・保管時などには、拡張部材24を取り外すことで、搬送の邪魔にならずスムースな搬送が可能となり、保管場所を省スペース化することができる。
この構成によれば、第1板体41を装着することによって、マルチコプター60の離着陸に適した面積及び形状を有する平面視領域Zを確保することができる。
また、機枠21は、マルチコプター60を充電可能な発電機26を少なくとも積載する積載スペース27を備えている。
また、機枠21は、作業車両2に連結される連結部30を備え、連結部30は、展開状態Yにおいてマルチコプター60が離着陸する平面視領域Zを水平に調整する調整機構42を介して作業車両2に連結される。
以上、本発明の実施形態について説明したが、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
20 離着陸装置
21 機枠
22 展開構造体
23 スライドステー
24 拡張部材
26 発電機
27 積載スペース
30 連結部
34 板材
35 収納箱
36 板材
37 板材
38 板材
39 板材
41 板体(第1板体)
42 調整機構
221 展開構造体
222 展開構造体
X 非展開状態
X1 非展開状態
X2 非展開状態
Y 展開状態
Y1 展開状態
Y2 展開状態
Z 平面視領域
Claims (5)
- 機枠と、
前記機枠に搭載された展開構造体であって、複数の板材を有し且つ前記複数の板材を展開していない非展開状態と、前記複数の板材を展開して前記非展開状態よりも平面視領域が大きい展開状態とに変更可能な展開構造体と、
前記展開構造体を前記機枠に対して第1位置から第2位置にスライドさせるスライドステーと、
を備え、
前記展開構造体は、前記展開状態における平面視領域の大きさがマルチコプターの離着陸が可能な大きさに設定され、前記複数の板材を前記非展開状態において前記板材の厚み方向に重ねて支持し、前記複数の板材を前記展開状態において前記複数の板材のそれぞれを前記厚み方向と直交する方向に展開にして支持し、
前記複数の板材は、同一の軸が貫通することによって枢支されており、厚み方向に重なった前記非展開状態から前記同一の軸回りに回転することにより前記展開状態とすることができ、
前記展開構造体は、前記第1位置にあるとき前記非展開状態とされ、前記第2位置にあるとき前記展開状態とすることができ、
前記展開構造体を前記第1位置から前記第2位置にスライドさせることにより、前記軸が移動して前記複数の板材が前記軸回りに回転するスペースが確保されて前記展開構造体を前記展開状態とすることができるマルチコプターの離着陸装置。 - 前記展開状態において前記展開構造体に装着可能であって、前記展開構造体に装着した状態で前記マルチコプターが離着陸する平面視領域を拡張する拡張部材を備えている請求項1に記載のマルチコプターの離着陸装置。
- 前記拡張部材は、前記展開構造体を展開状態にしたときの前記複数の板材のうち、隣接する板材の間に装着可能な板体である請求項2に記載のマルチコプターの離着陸装置。
- 前記機枠は、前記マルチコプターを充電可能な発電機を少なくとも積載する積載スペースを備えている請求項1~3のいずれかに記載のマルチコプターの離着陸装置。
- 前記機枠は、作業車両に連結される連結部を備え、
前記連結部は、前記展開状態において前記マルチコプターが離着陸する平面視領域を水平に調整する調整機構を介して前記作業車両に連結される請求項1~4のいずれかに記載のマルチコプターの離着陸装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019237908A JP7309600B2 (ja) | 2019-12-27 | 2019-12-27 | マルチコプターの離着陸装置 |
| PCT/JP2020/047026 WO2021131982A1 (ja) | 2019-12-27 | 2020-12-16 | マルチコプターの離着陸装置 |
| JP2023110807A JP7443604B2 (ja) | 2019-12-27 | 2023-07-05 | マルチコプターの離着陸装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019237908A JP7309600B2 (ja) | 2019-12-27 | 2019-12-27 | マルチコプターの離着陸装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023110807A Division JP7443604B2 (ja) | 2019-12-27 | 2023-07-05 | マルチコプターの離着陸装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021104786A JP2021104786A (ja) | 2021-07-26 |
| JP7309600B2 true JP7309600B2 (ja) | 2023-07-18 |
Family
ID=76573245
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019237908A Active JP7309600B2 (ja) | 2019-12-27 | 2019-12-27 | マルチコプターの離着陸装置 |
| JP2023110807A Active JP7443604B2 (ja) | 2019-12-27 | 2023-07-05 | マルチコプターの離着陸装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023110807A Active JP7443604B2 (ja) | 2019-12-27 | 2023-07-05 | マルチコプターの離着陸装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (2) | JP7309600B2 (ja) |
| WO (1) | WO2021131982A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023187953A1 (ja) * | 2022-03-29 | 2023-10-05 | 株式会社クボタ | 作業支援システム |
| WO2023187964A1 (ja) * | 2022-03-29 | 2023-10-05 | 株式会社クボタ | 作業支援システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015026018A1 (ko) | 2013-08-23 | 2015-02-26 | 한국항공우주연구원 | 무인 수직이착륙 비행체의 충전 및 격납을 위한 장치 및 그 방법 |
| JP2017124758A (ja) | 2016-01-14 | 2017-07-20 | 田淵電機株式会社 | 飛行体の着陸対象装置、および飛行体の制御方法 |
| JP2019085104A (ja) | 2017-11-06 | 2019-06-06 | 株式会社エアロネクスト | 飛行体及び飛行体の制御方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09302628A (ja) * | 1996-05-16 | 1997-11-25 | Mutsuo Hamaguchi | 小型飛行体物体の移動式離着陸施設 |
| JP7059383B2 (ja) | 2018-02-21 | 2022-04-25 | シューコー インターナショナル コマンデイトゲゼルシャフト | 無人航空機から手紙および小包を送受するための装置を含む、窓、ドア、傾斜屋根またはファサードのための要素 |
| CN207956095U (zh) | 2018-03-13 | 2018-10-12 | 江苏捷诚车载电子信息工程有限公司 | 无人机运输及发射起飞车 |
| CN109623839A (zh) | 2018-12-24 | 2019-04-16 | 西南交通大学 | 配电站室内设备地空协同巡检装置及其巡检方法 |
-
2019
- 2019-12-27 JP JP2019237908A patent/JP7309600B2/ja active Active
-
2020
- 2020-12-16 WO PCT/JP2020/047026 patent/WO2021131982A1/ja active Application Filing
-
2023
- 2023-07-05 JP JP2023110807A patent/JP7443604B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015026018A1 (ko) | 2013-08-23 | 2015-02-26 | 한국항공우주연구원 | 무인 수직이착륙 비행체의 충전 및 격납을 위한 장치 및 그 방법 |
| JP2017124758A (ja) | 2016-01-14 | 2017-07-20 | 田淵電機株式会社 | 飛行体の着陸対象装置、および飛行体の制御方法 |
| JP2019085104A (ja) | 2017-11-06 | 2019-06-06 | 株式会社エアロネクスト | 飛行体及び飛行体の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023118892A (ja) | 2023-08-25 |
| JP7443604B2 (ja) | 2024-03-05 |
| JP2021104786A (ja) | 2021-07-26 |
| WO2021131982A1 (ja) | 2021-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7443604B2 (ja) | マルチコプターの離着陸装置 | |
| JP6583874B1 (ja) | 配送システム、飛行体、および、コントローラ | |
| US8342440B2 (en) | Miniature robotic vehicle with ground and flight capability | |
| US20220203880A1 (en) | Modular container transport systems | |
| US10947036B2 (en) | Modular container transport systems | |
| CN109070989B (zh) | 可折叠无人飞行器 | |
| RU2719047C1 (ru) | Рабочее транспортное средство (варианты) | |
| US20140217230A1 (en) | Drone cargo helicopter | |
| JP6891102B2 (ja) | 農業用マルチコプター | |
| WO2021131983A1 (ja) | 散布機能付きマルチコプターの離着陸装置 | |
| CN114393965A (zh) | 一种自动折叠的陆空两栖多模态运载装置 | |
| JP6746137B2 (ja) | 無人航空機 | |
| BR112018074142B1 (pt) | Sistema de veículo agrícola de múltiplos objetivos | |
| ES2933962T3 (es) | Dispositivo de trabajo autopropulsado | |
| JP6558787B1 (ja) | 飛行体 | |
| KR102473938B1 (ko) | 비행 안정성이 향상된 드론 | |
| EP3573898B1 (en) | Ground transport drive container, method for positioning a drive container | |
| WO2021132372A1 (ja) | マルチコプターの離着陸装置 | |
| US11975821B2 (en) | Flight device | |
| JP6881336B2 (ja) | 作業車両 | |
| JP2020083296A (ja) | 飛行体 | |
| KR102473944B1 (ko) | 기체 안전성이 향상된 드론 | |
| WO2024142226A1 (ja) | 無人航空機 | |
| US20240180062A1 (en) | Agricultural assistance system | |
| KR20230039166A (ko) | 이동이 용이한 드론 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230509 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230705 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7309600 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |