JP7288317B2 - 補正情報送信システム - Google Patents
補正情報送信システム Download PDFInfo
- Publication number
- JP7288317B2 JP7288317B2 JP2019044315A JP2019044315A JP7288317B2 JP 7288317 B2 JP7288317 B2 JP 7288317B2 JP 2019044315 A JP2019044315 A JP 2019044315A JP 2019044315 A JP2019044315 A JP 2019044315A JP 7288317 B2 JP7288317 B2 JP 7288317B2
- Authority
- JP
- Japan
- Prior art keywords
- satellite
- mobile station
- correction information
- satellites
- transmission system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012937 correction Methods 0.000 title claims description 171
- 230000005540 biological transmission Effects 0.000 title claims description 79
- 238000004891 communication Methods 0.000 claims description 108
- 238000004364 calculation method Methods 0.000 claims description 45
- 238000012545 processing Methods 0.000 description 47
- 238000010586 diagram Methods 0.000 description 13
- 238000000034 method Methods 0.000 description 13
- 230000008569 process Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 7
- 230000006866 deterioration Effects 0.000 description 5
- 238000010276 construction Methods 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 230000008901 benefit Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/03—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers
- G01S19/07—Cooperating elements; Interaction or communication between different cooperating elements or between cooperating elements and receivers providing data for correcting measured positioning data, e.g. DGPS [differential GPS] or ionosphere corrections
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/22—Multipath-related issues
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/28—Satellite selection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
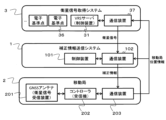
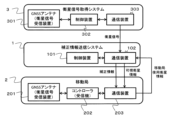
図1は本発明の第1実施形態に係る衛星測位システムのハードウェア構成図である。この図に示す衛星測位システムは,補正情報を生成して送信する補正情報送信システム1と,補正情報送信システム1から送信される補正情報を利用して移動体の位置を計測する移動局2と,衛星信号を補正情報送信システム1に送信する衛星信号取得システム3とを備えている。
以上のように構成された第1実施形態に係る衛星測位システムでは,補正情報送信システム1の制御装置101が,衛星信号取得システム3のVRSサーバ31から衛星信号が送信される複数の衛星のうち,移動局2のコントローラ202による測位に使用する可能性の高い衛星を推測し,その推測した衛星の衛星情報を優先的に選択することで通信装置102の通信速度から規定されるデータ量に納めた補正情報を移動局2に送信する。これにより移動局2での測位演算に使用される衛星の情報が含まれた補正情報が,通信装置102の通信速度で充分送信可能なデータ量で送信され,通信速度に制限のある環境下においても移動局2の衛星測位精度を維持することができる。
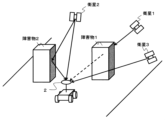
次に本発明の第2実施形態に係る衛星測位システムについて説明する。第1実施形態では,移動局2と衛星と障害物(地形,建物等)の位置に基づいて移動局2での通信状況の良い衛星を推定し,その衛星の信号から補正情報を生成することで補正情報のデータ量を制限した。これに対して,本実施形態では,基準局(衛星信号取得システム3)での通信状況の良い衛星の情報(可視衛星情報)と,移動局2での通信状況が良く移動局2で測位演算に使用される可能性のある衛星の情報(移動局使用衛星情報)とを対比して,それらに共通する衛星の信号から補正情報を生成することで補正情報のデータ量の削減を図っている。以下,本実施の形態の詳細について説明する。なお,第1実施形態と同じ部分には同じ符号を付して説明を省略することがある。
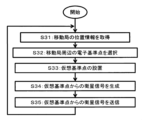
使用衛星推定部13は,衛星信号取得システム3から衛星信号が送信される複数の衛星の中から移動局2が測位演算(RTK測位)に使用する衛星を,移動局2から送信される移動局使用衛星情報に基づいて推定する処理を行う部分である。移動局使用衛星情報とは,移動局2での通信状況が良好な衛星の情報であって,移動局2で測位に使用する可能性が比較的高い衛星の情報のことである。
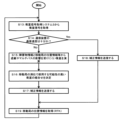
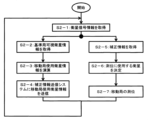
上記のように構成された第2実施形態に係る衛星測位システムでは,補正情報送信システム1の制御装置101(基準局可視衛星判定部16)が基準局(衛星信号取得システム3)で衛星信号の受信状況の良い衛星(基準局可視衛星)の番号を移動局2に送信する。移動局2のコントローラ202(使用衛星推定部27)は,例えば,その基準局可視衛星と,移動局2で衛星信号の受信状況の良い衛星との双方に含まれる衛星を選択し,その選択した衛星の情報を移動局使用衛星情報(すなわち,移動局2が測位演算に衛星信号を使用する可能性のある衛星の情報)として補正情報送信システム1に送信する。この移動局使用衛星情報を受信した補正情報送信システム1の制御装置101(優先度判定部14)は,通信機102で送信可能なデータ量の範囲内まで移動局使用衛星情報に含まれる衛星数を低減し,その衛星数低減後の衛星信号を基に生成した補正情報を移動局2(補正情報受信部22)に送信する。移動局2のコントローラ202(測位演算部24)は衛星数低減後の補正情報とその補正情報に含まれる衛星の信号(衛星信号受信部21で受信した衛星信号)とに基づいて測位を行う。これにより通信速度に制限のある環境下においても移動局2の測位精度の低下を抑制できる。特に本実施形態では,基準局3で受信状況の良い衛星(基準局可視衛星)と,移動局2で受信状況の良い衛星(移動局使用衛星)とを比較し,両者に含まれる衛星の衛星信号と補正情報に基づく移動局2の測位が可能になるので,測位精度が向上し易い点がメリットとなる。また,第1実施形態のように移動局2の周囲に存在する障害物情報を予め用意しておく必要がない点も特長となり得る。
本発明は,上記の各実施形態に限定されるものではなく,その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば,本発明は,上記の各実施形態で説明した全ての構成を備えるものに限定されず,その構成の一部を削除したものも含まれる。また,ある実施形態に係る構成の一部を,他の実施形態に係る構成に追加又は置換することが可能である。
Claims (5)
- 移動局がRTK測位に使用する補正情報を生成する制御装置と,前記制御装置で生成された前記補正情報を前記移動局に送信する通信装置とを備えた補正情報送信システムにおいて,
前記制御装置は,
基準点から送信される複数の衛星からの衛星信号を前記通信装置を介して取得し,
前記制御装置に記憶された前記移動局の周辺の障害物の位置及び形状の情報と,前記移動局から送信される前記移動局の位置情報と,前記複数の衛星からの衛星信号に含まれる前記複数の衛星の位置情報とに基づいて,前記複数の衛星からの衛星信号のうちマルチパスの影響を受けずに前記移動局が受信できる衛星信号を送信する衛星を,前記移動局が測位演算に衛星信号を使用する衛星として推定し,
前記通信装置の通信速度から規定されるデータ量に前記補正情報のデータ量が収まるように,前記複数の衛星の中から前記推定した衛星を優先的に選択することで前記補正情報を生成することを特徴とする補正情報送信システム。 - 移動局がRTK測位に使用する補正情報を生成する制御装置と,前記制御装置で生成された前記補正情報を前記移動局に送信する通信装置とを備えた補正情報送信システムにおいて,
前記制御装置は,
基準点から送信される複数の衛星からの衛星信号を前記通信装置を介して取得し,
前記移動局から前記補正情報送信システムに送信される情報であって,前記複数の衛星の中で前記移動局が測位演算に衛星信号を使用する可能性のある衛星の情報である移動局使用衛星情報に基づいて,前記複数の衛星の中から前記移動局が測位演算に衛星信号を使用する衛星を推定し,
前記通信装置の通信速度から規定されるデータ量に前記補正情報のデータ量が収まるように,前記複数の衛星の中から前記推定した衛星を優先的に選択することで前記補正情報を生成することを特徴とする補正情報送信システム。 - 請求項2の補正情報送信システムにおいて,
前記移動局使用衛星情報は,前記移動局で衛星信号を受信できた衛星と,前記基準点においてマルチパスの影響を受けずに衛星信号を受信できた衛星との双方に含まれる衛星に基づいて演算される衛星の情報であって,前記補正情報送信システムが送信する前記補正情報に含まれるべき衛星の情報であることを特徴とする補正情報送信システム。 - 請求項1-3のいずれか1項の補正情報送信システムにおいて,
前記複数の衛星の衛星信号は,前記基準点に設置された固定局で受信されることを特徴とする補正情報送信システム。 - 請求項1-3のいずれか1項の補正情報送信システムにおいて,
前記基準点は,前記移動局の周辺に位置する複数の電子基準点が受信した衛星信号に基づいて設定される仮想基準点であることを特徴とする補正情報送信システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019044315A JP7288317B2 (ja) | 2019-03-11 | 2019-03-11 | 補正情報送信システム |
| PCT/JP2020/004158 WO2020183986A1 (ja) | 2019-03-11 | 2020-02-04 | 補正情報送信システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019044315A JP7288317B2 (ja) | 2019-03-11 | 2019-03-11 | 補正情報送信システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020148514A JP2020148514A (ja) | 2020-09-17 |
| JP2020148514A5 JP2020148514A5 (ja) | 2022-03-16 |
| JP7288317B2 true JP7288317B2 (ja) | 2023-06-07 |
Family
ID=72426013
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019044315A Active JP7288317B2 (ja) | 2019-03-11 | 2019-03-11 | 補正情報送信システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7288317B2 (ja) |
| WO (1) | WO2020183986A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7292359B2 (ja) * | 2021-11-17 | 2023-06-16 | 三菱電機株式会社 | 位置推定装置、位置推定方法及び自動運転システム |
| JP2026020629A (ja) * | 2024-07-29 | 2026-02-10 | Astemo株式会社 | 自己位置推定装置及び自己位置推定方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005233719A (ja) | 2004-02-18 | 2005-09-02 | Matsushita Electric Ind Co Ltd | 現在位置検出装置およびナビゲーション装置 |
| WO2006132003A1 (ja) | 2005-06-06 | 2006-12-14 | National University Corporation Tokyo University Of Marine Science And Technology | Gps受信装置およびgps測位補正方法 |
| JP2010163118A (ja) | 2009-01-19 | 2010-07-29 | Toshiba Corp | 列車位置検知システム |
| JP2013083480A (ja) | 2011-10-06 | 2013-05-09 | Electronic Navigation Research Institute | Rtk測位計算に利用する衛星の選択方法及びその装置 |
| US20130304376A1 (en) | 2012-05-09 | 2013-11-14 | Samsung Electronics Co. Ltd. | Method and apparatus for position measuring of portable electronic device |
| JP2016102789A (ja) | 2014-11-18 | 2016-06-02 | 長田電機株式会社 | 変位監視システム及び変位監視方法 |
| WO2016088654A1 (ja) | 2014-12-02 | 2016-06-09 | 三菱電機株式会社 | 情報処理装置及び測位装置 |
| WO2018083803A1 (ja) | 2016-11-07 | 2018-05-11 | 三菱電機株式会社 | 測位補強装置、測位補強システムおよび測位補強方法 |
| WO2018110026A1 (ja) | 2016-12-16 | 2018-06-21 | パナソニックIpマネジメント株式会社 | 測位方法、配信方法、測位端末および測位システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3637354B2 (ja) * | 1997-03-05 | 2005-04-13 | 国土交通省九州地方整備局長 | 測量用データ収集装置、測量用データ収集方法および測量用データ収集プログラムを記憶した媒体 |
| JP3734625B2 (ja) * | 1998-08-03 | 2006-01-11 | アルパイン株式会社 | ナビゲーション装置 |
| JP2016020812A (ja) * | 2014-07-11 | 2016-02-04 | トヨタ自動車株式会社 | 測位補正情報提供装置および衛星測位装置 |
-
2019
- 2019-03-11 JP JP2019044315A patent/JP7288317B2/ja active Active
-
2020
- 2020-02-04 WO PCT/JP2020/004158 patent/WO2020183986A1/ja not_active Ceased
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005233719A (ja) | 2004-02-18 | 2005-09-02 | Matsushita Electric Ind Co Ltd | 現在位置検出装置およびナビゲーション装置 |
| WO2006132003A1 (ja) | 2005-06-06 | 2006-12-14 | National University Corporation Tokyo University Of Marine Science And Technology | Gps受信装置およびgps測位補正方法 |
| JP2010163118A (ja) | 2009-01-19 | 2010-07-29 | Toshiba Corp | 列車位置検知システム |
| JP2013083480A (ja) | 2011-10-06 | 2013-05-09 | Electronic Navigation Research Institute | Rtk測位計算に利用する衛星の選択方法及びその装置 |
| US20130304376A1 (en) | 2012-05-09 | 2013-11-14 | Samsung Electronics Co. Ltd. | Method and apparatus for position measuring of portable electronic device |
| JP2016102789A (ja) | 2014-11-18 | 2016-06-02 | 長田電機株式会社 | 変位監視システム及び変位監視方法 |
| WO2016088654A1 (ja) | 2014-12-02 | 2016-06-09 | 三菱電機株式会社 | 情報処理装置及び測位装置 |
| WO2018083803A1 (ja) | 2016-11-07 | 2018-05-11 | 三菱電機株式会社 | 測位補強装置、測位補強システムおよび測位補強方法 |
| WO2018110026A1 (ja) | 2016-12-16 | 2018-06-21 | パナソニックIpマネジメント株式会社 | 測位方法、配信方法、測位端末および測位システム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020183986A1 (ja) | 2020-09-17 |
| JP2020148514A (ja) | 2020-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2839686B1 (en) | Navigation track correction | |
| JP7334503B2 (ja) | 測位方法、測位システム、および移動局 | |
| US20110201357A1 (en) | Method and system for refining a location of a base station and/or a mobile device based on signal strength measurements and corresponding transmitter and/or receiver antenna patterns | |
| EP2995969B1 (en) | Providing wireless transmitter almanac information to mobile station based on expected contribution to future navigation operation | |
| CN109076481B (zh) | 网络通信装置、用户通信装置、确定位置的方法和介质 | |
| US9660740B2 (en) | Signal strength distribution establishing method and wireless positioning system | |
| US20150185331A1 (en) | Navigation System and Method Using RTK with Data Received from a Mobile Base Station | |
| KR101203272B1 (ko) | 의사위성 항법 시스템 | |
| CN108267762A (zh) | 实时动态定位系统虚拟参考站切换方法和设备 | |
| CN104427609A (zh) | 一种定位方法和系统 | |
| JP2015075380A (ja) | リアルタイムキネマティックシステム及び位置測定方法 | |
| JP7288317B2 (ja) | 補正情報送信システム | |
| KR20200040333A (ko) | 무제한 네트워크-rtk 방법 및 이를 이용한 가상 기준국 서버 | |
| KR102205681B1 (ko) | 임시 기준 단말 장치를 활용한 rtk 그룹 측위 방법 | |
| JP2007333636A (ja) | 路側装置、端末装置およびdgps測位システム | |
| US20160124069A1 (en) | Systems and methods for estimating a two-dimensional position of a receiver | |
| EP3276377B1 (en) | Positioning method, positioning system, correction information generation method, correction information generation device, and positioning system relay station and terminal | |
| CN107632314A (zh) | 移动终端的定位方法及移动终端 | |
| KR102199972B1 (ko) | 위성항법 보강정보 선택 방법 및 그 방법을 이용하는 사용자 단말 | |
| KR101631121B1 (ko) | 모바일 컴퓨팅 장치의 위치 검출 방법 및 이를 수행하는 모바일 컴퓨팅 장치 | |
| CN102236098A (zh) | 全球定位系统的辅助定位方法与装置 | |
| JP2006258461A (ja) | 測位装置、測位方法および測位プログラム | |
| JP2018004434A (ja) | 測位処理システム、方法、コンピュータプログラム、サーバ装置及びユーザ端末 | |
| KR20150084725A (ko) | 무선 ap를 이용한 정밀 측위 장치 및 방법 | |
| JP2008267973A (ja) | 測位システム、移動通信端末、測位方法、測位サーバ、測位用icチップ、及び測位プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220308 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230526 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7288317 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |