JP7204672B2 - 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 - Google Patents
注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 Download PDFInfo
- Publication number
- JP7204672B2 JP7204672B2 JP2019560497A JP2019560497A JP7204672B2 JP 7204672 B2 JP7204672 B2 JP 7204672B2 JP 2019560497 A JP2019560497 A JP 2019560497A JP 2019560497 A JP2019560497 A JP 2019560497A JP 7204672 B2 JP7204672 B2 JP 7204672B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- control system
- measuring means
- drug delivery
- dose
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/31566—Means improving security or handling thereof
- A61M5/31568—Means keeping track of the total dose administered, e.g. since the cartridge was inserted
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
- A61M5/31545—Setting modes for dosing
- A61M5/31548—Mechanically operated dose setting member
- A61M5/3155—Mechanically operated dose setting member by rotational movement of dose setting member, e.g. during setting or filling of a syringe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
- A61M5/31545—Setting modes for dosing
- A61M5/31548—Mechanically operated dose setting member
- A61M5/3155—Mechanically operated dose setting member by rotational movement of dose setting member, e.g. during setting or filling of a syringe
- A61M5/31553—Mechanically operated dose setting member by rotational movement of dose setting member, e.g. during setting or filling of a syringe without axial movement of dose setting member
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/041—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators in which a variable is automatically adjusted to optimise the performance
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/10—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to drugs or medications, e.g. for ensuring correct administration to patients
- G16H20/17—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to drugs or medications, e.g. for ensuring correct administration to patients delivered via infusion or injection
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M2005/3125—Details specific display means, e.g. to indicate dose setting
- A61M2005/3126—Specific display means related to dosing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3317—Electromagnetic, inductive or dielectric measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3368—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3546—Range
- A61M2205/3553—Range remote, e.g. between patient's home and doctor's office
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3576—Communication with non implanted data transmission devices, e.g. using external transmitter or receiver
- A61M2205/3592—Communication with non implanted data transmission devices, e.g. using external transmitter or receiver using telemetric means, e.g. radio or optical transmission
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/50—General characteristics of the apparatus with microprocessors or computers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
- A61M2205/6054—Magnetic identification systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31525—Dosing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
- G01D18/002—Automatic recalibration
- G01D18/004—Continuous recalibration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
- G01D18/008—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00 with calibration coefficients stored in memory
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/20—Detecting rotary movement
- G01D2205/22—Detecting rotary movement by converting the rotary movement into a linear movement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0017—Means for compensating offset magnetic fields or the magnetic flux to be measured; Means for generating calibration magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Anesthesiology (AREA)
- Heart & Thoracic Surgery (AREA)
- Hematology (AREA)
- Vascular Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Chemical & Material Sciences (AREA)
- Medicinal Chemistry (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Software Systems (AREA)
- Automation & Control Theory (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Measuring Magnetic Variables (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
-前記薬物送達本体の近位端で回転可能投与量ホイールに取り外し可能に取り付け可能な、または永久的に固定される略円板形の直径方向単一双極子磁石と、
-薬物送達本体の近位端へ取り外し可能に取り付け可能なハウジングであって、前記取り外し可能に取り付け可能なハウジングは、
-略円板形の直径方向単一双極子磁石により生成される磁場を測定するように構成される、少なくとも第1および第2の磁場測定手段を備える、ハウジングと、
-少なくとも第1および第2の磁場測定手段へ連結され、少なくとも第1および第2の磁場測定手段から受信される情報を処理するように構成される一体式制御ユニットと、を備え、
-前記少なくとも第1および第2の磁場測定手段は、取り外し可能に取り付け可能なハウジング内に、薬物送達本体および略円板形の直径方向単一双極子磁石の長手方向軸に対して変位された軸方向関係で位置決めされ、
-前記略円板形の直径方向単一双極子磁石は、薬物送達本体の長手方向軸の周りを前記投与量設定ホイールと共回転するように構成され、かつ、
-前記一体式制御ユニットは、さらに、
磁場測定手段の変位された軸方向関係に関して正規化されたベクトルを提供するように構成され、前記正規化されるベクトルは、略円板形の直径方向単一双極子磁石の回転により生成されて磁場測定手段により測定される測定磁場から導出され、かつ前記一体式制御ユニットは、さらに、
前記正規化されたベクトルから投与量設定値を計算するように構成される。

m1とm2との関係は、次のように表される。
は、測定される任意の所与の磁場の座標であり、よって、回転角を次式のように計算することができる。
測定される各磁場の法線投影が、
(a)薬物送達デバイス本体の長手方向軸に沿った磁石の距離と、
(b)磁場測定手段の変位された非軸方向アラインメントに起因して、磁石の最大磁場ポテンシャルに対して距離の揺動、ひいては、法線投影の揺動を生み出す、磁石の回転角と、の関数として変化し、
法線投影の角度に対する測定された磁場の角度の差が、回転の距離および角度の双方の関数として変化する、言い替えれば、測定される磁場と法線投影とがもはや同一平面上にない。
各磁力計に起因するオフセットおよび較正誤差、
各磁力計に固有の感度誤差、および行われる各測定の誤差、
外的な磁場外乱に起因して生じる誤差、但しこれは、主に地球固有の磁場である、
システムを構成するコンポーネントの機械公差により誘発される誤差。

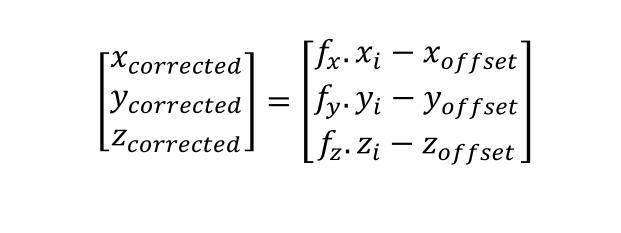
ここで、x、yおよびzは、磁場の直交する3軸であり、かつ、
xi、yiおよびziは、3次元の点のクラウドに似た測定磁場の対応するベクトルによって生成される一連の点であり、前記点のクラウドは、次の因数、
によってスフェリサイズ(sphericize)される。
CMm1:磁力計m1により測定される磁場
CMm2:磁力計m2により測定される磁場
CAm1:磁力計m1により測定される、磁石により生成される実際の磁場
CAm2:磁力計m2により測定される、磁石により生成される実際の磁場
CE:外部磁場、
およびこれらのコンポーネント間の関係は、次のように定義される。
CMm1=CAm1+CE
CMm2=CAm2+CE
CR=CMm1-CMm2=(CAm1+CE)-(CAm2+CE)=CAm1-CAm2
│CAm1│>│CAm2│
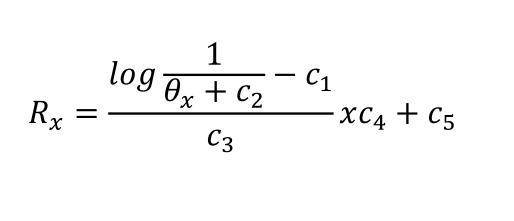
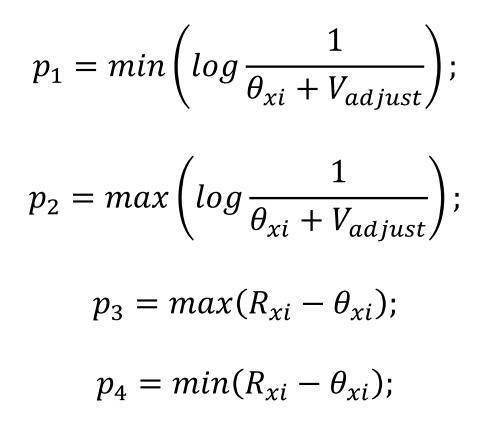
Rxは、単位度で示される角度であって、磁場擬似ベクトルの、好ましくはX軸である直交する1つの軸を中心とする回転による変換を有効化して前記磁場擬似ベクトルを位置合わせし、よって、前記擬似ベクトルは、その等法線投影と略同一平面となる。

であり、かつ、
である。
前記第1の磁力計(m1)と前記第2の磁力計(m2)との相対的空間位置、
前記第1および第2の磁力計の物理的特性、
略円板形の直径方向単一双極子磁石の磁場生成能力、
略円板形の直径方向単一双極子磁石のサイズ、
距離d、および、
その他、適切と思われる任意選択のパラメータ、
を考慮した定数である。
磁場の値の代表的な部分集合について、データセットを生成する。データは、様々な代表的距離dについて生成される。このようなデータ生成シミュレーションでの使用に適するシミュレーションソフトウェアプログラムまたはライブラリは、Infineonが提供する「3D磁気センサ設計ツール」として知られるものであり、ウェブページ、URL:http://design.infineon.com/3dsim/#/からアクセス可能である。
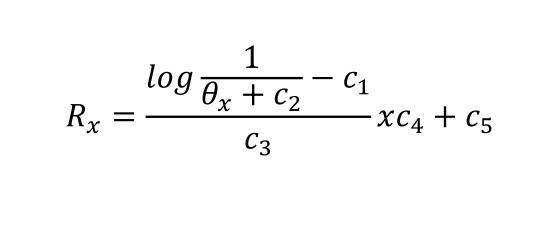
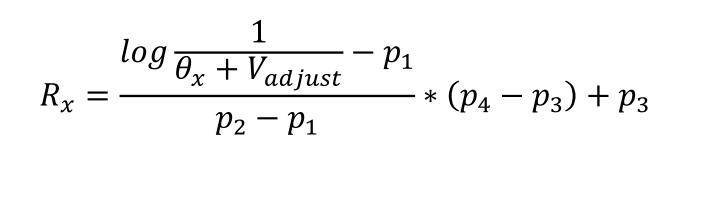
ここで、Rxは、次のようにモデリングすることができる。

ここで、
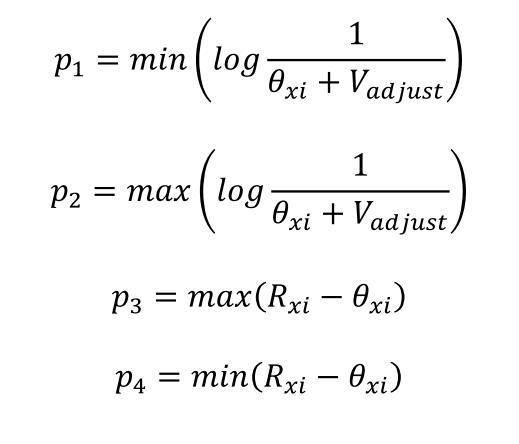
である。
c1=p1
c2=Vadjust
c3=p2-p1
c4=p4-p3
c5=p3
c1=-2.31864756900365
c2=175.72
c3=0.105103250465988
c4=25.2
c5=22.16
-回転可能な略円板形の直径方向単一双極子磁石により生成される磁場(CM)を、前記磁石の回転軸に対して変位される軸方向アラインメントで配置される少なくとも第1の磁力計(m1)および第2の磁力計(m2)によって測定するステップと、
-結果的に生じる磁場擬似ベクトル(CR)を計算するステップと、
-任意選択により、前記測定された磁場CMm1およびCMm2を補正するステップと、
-前記磁場擬似ベクトルについて、投影の等法線平面に対する回転角を計算するステップと、
-前記回転角を有する前記磁場擬似ベクトルを変換して、回転および投影により、等法線が補正された磁場擬似ベクトル(CR2)を生成するステップと、
-前記補正された等法線磁場擬似ベクトルから、前記回転軸を中心とする前記磁石の回転角を計算するステップとを含む。
-例えば鉄、酸素およびストロンチウムの結晶化合物を含む、フェライト磁石、特に、焼結フェライト磁石、
-熱可塑性マトリクスおよび等方性ネオジム-鉄-ホウ素粉末からなる複合材料、
-熱可塑性マトリクスおよびストロンチウム系ハードフェライト粉末で構成される複合材料。これにより、結果的に生じる磁石は、等方性、すなわち非配向性の、または異方性、すなわち配向性のフェライト粒子を包含することができる、
-熱硬化性マトリクスおよび等方性ネオジム-鉄-ホウ素粉末で製造される複合材料、
-例えば、合成ゴムまたはPVCと混合された重荷電ストロンチウムフェライト粉末で製造され、その後、所望される形状に押し出されるか、カレンダ掛けして微細シートにされる磁性エラストマー、
-概して茶色いシートの外観を有し、かつその厚さおよびその組成に依存して多かれ少なかれ柔軟であるカレンダ掛けされた軟質複合材。これらの複合材は、決してゴムのような弾性ではなく、60~65Shore D ANSI範囲のショア硬度を有する傾向がある。このような複合材は、概して、ストロンチウムフェライト粒子が充填された合成エラストマーから形成される。結果的に生じる磁石は、異方性または等方性である可能性があり、シートの多様性は、概してカレンダ掛けに起因する磁性粒子のアラインメントを有する、
-概して上述のような軟質複合材を含む、軟鉄極板で相互に積層されるラミネート複合材、
-ネオジム-鉄-ホウ素磁石、
-アルミニウム-ニッケル-コバルト合金で製造され、かつ磁化された鋼、
-サマリウム・コバルト合金。
Rxは、単位度で示される角度であって、磁場擬似ベクトルの、好ましくはX軸である直交する1つの軸を中心とした回転による変換を有効化して前記磁場ベクトルを位置合わせし、よって、前記擬似ベクトルは、その等法線投影平面と略同一平面となる。

であり、かつ、

である。
前記第1の磁力計(m1)と前記第2の磁力計(m2)との相対的空間位置、
前記第1および第2の磁力計の物理的特性、
略円板形の直径方向単一双極子磁石の磁場生成能力、
略円板形の直径方向単一双極子磁石のサイズ、
距離d、および、
その他、適切と思われる任意選択のパラメータ、
を考慮した定数である。
磁場の値の代表的な部分集合について、データセットを生成する。データは、様々な代表的距離dについて生成される。このようなデータ生成シミュレーションでの使用に適するシミュレーションソフトウェアプログラムまたはライブラリは、Infineonが提供する「3D磁気センサ設計ツール」として知られるものであり、ウェブページ、URL:http://design.infineon.com/3dsim/#/からアクセス可能である。
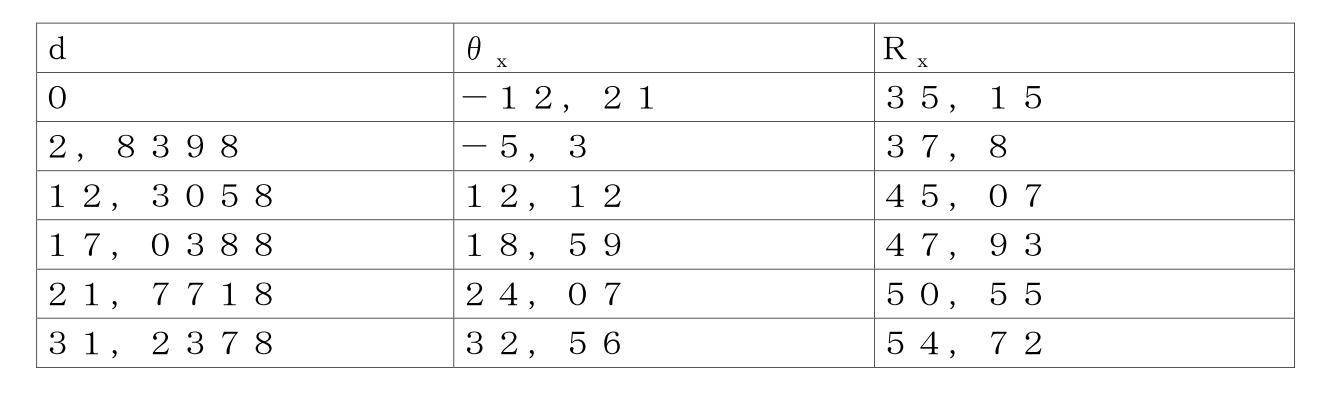
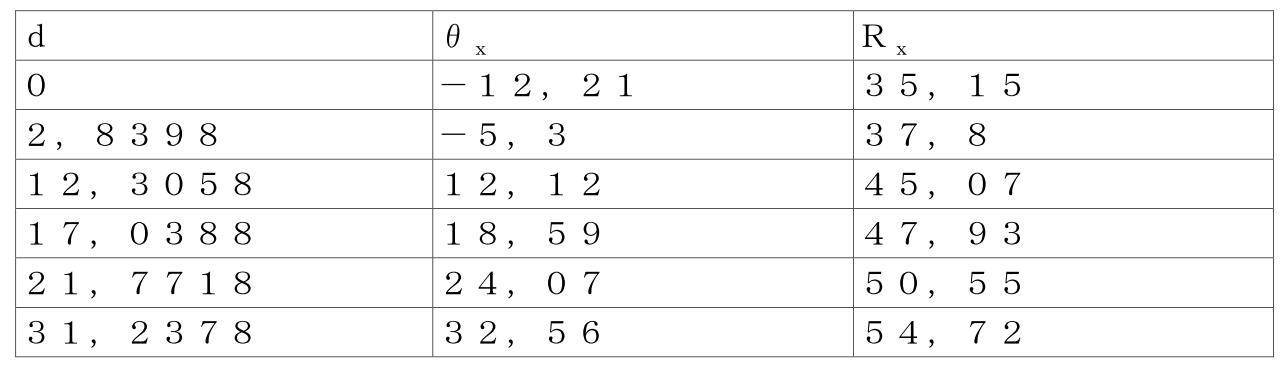
Rxを、各距離dのθx値についてモデリングし、di、θxiおよびRxiの値セットを得る。以下に示す値は、ある特定のシステムに関する、単に例示を目的とするものである。
ここで、Rxは、次のようにモデリングすることができる。
ここで、

である。
c1=p1
c2=Vadjust
c3=p2-p1
c4=p4-p3
c5=p3
c1=-2.31864756900365
c2=175.72
c3=0.105103250465988
c4=25.2
c5=22.16

次に、各測定値について、オフセットまたは感度因数が計算され、

が得られる。

および、
が計算される。
が得られる。

および、

を用いて計算される。


次いで、これを用いて、法線を次式のように計算することができる。

Claims (22)
- 注射可能な薬物送達デバイス用に構成される投与量制御システムであって、前記薬物送達デバイスは、遠位端と近位端とを有する細長い薬物送達本体と、前記薬物送達本体によって保持される少なくとも1つの注射可能な薬物と、前記薬物送達本体の近位端に位置決めされ、前記薬物送達本体の長手方向軸を中心にして回転可能な投与量設定ホイールとを備え、前記投与量制御システムは、
前記薬物送達本体の前記近位端で前記回転可能な投与量設定ホイールに取り外し可能に取り付け可能な、または永久的に固定される略円板形の直径方向単一双極子磁石と、
前記薬物送達本体の前記近位端へ取り外し可能に取り付け可能なハウジングであって、前記取り外し可能に取り付け可能なハウジングは、
前記略円板形の直径方向単一双極子磁石により生成される磁場を測定するように構成される、少なくとも第1および第2の磁場測定手段を備える、取り外し可能に取り付け可能なハウジングと、
前記少なくとも第1および第2の磁場測定手段へ連結され、前記少なくとも第1および第2の磁場測定手段から受信される情報を処理するように構成される一体式制御ユニットと、を備え、
前記少なくとも第1および第2の磁場測定手段は、前記取り外し可能に取り付け可能なハウジング内に、前記薬物送達本体および前記略円板形の直径方向単一双極子磁石の長手方向軸に対して変位された軸方向関係で位置決めされ、
前記略円板形の直径方向単一双極子磁石は、前記薬物送達本体の前記長手方向軸の周りを前記回転可能な投与量設定ホイールと共回転するように構成され、
前記一体式制御ユニットは、前記少なくとも第1および第2の磁場測定手段により測定され、かつ前記少なくとも第1および第2の磁場測定手段と前記略円板形の直径方向単一双極子磁石との軸方向アラインメントの欠如から結果的に生じる磁場値を、前記少なくとも第1および第2の磁場測定手段により測定される測定磁場で構成されかつ前記測定磁場から計算される合成擬似磁場を表す擬似ベクトルへ直交する3軸x、yまたはzのうちの1つを中心とする回転を印加して前記合成擬似磁場を表す前記擬似ベクトルを等法線投影平面に収めることにより、補正するように構成され、
前記擬似ベクトルは、以下の式
CR=CMm1-CMm2=(CAm1+CE)-(CAm2+CE)=CAm1-CAm2
で定義される擬似結果磁場であり、
ここで、
CRは、結果的に生じる磁場擬似ベクトル、
CMm1は、前記第1の磁場測定手段により測定される磁場、
CMm2は、前記第2の磁場測定手段により測定される磁場、
CAm1は、前記第1の磁場測定手段により測定される、前記略円板形の直径方向単一双極子磁石により生成される実際の磁場、
CAm2は、前記第2の磁場測定手段により測定される、前記略円板形の直径方向単一双極子磁石により生成される実際の磁場、
CEは、外部磁場、
であり、
前記一体式制御ユニットは、さらに、
前記少なくとも第1および第2の磁場測定手段の前記変位された軸方向関係に関して正規化されたベクトルを提供するように構成され、前記正規化されたベクトルは、前記略円板形の直径方向単一双極子磁石の前記回転により生成されて前記少なくとも第1および第2の磁場測定手段の前記測定磁場から導出され、前記一体式制御ユニットは、さらに、前記正規化されたベクトルから投与量設定値を計算するように構成され、前記正規化されたベクトルは、以下の計算式
[数1]
および、
[数2]
の適用により補正するように構成され、ここで、
R x は、単位度で表される角度であり、測定磁場の、好ましくはX軸である直交する1つの軸を中心とする回転による変換を有効化して、角ベクトルとして表される前記磁場を位置合わせし直し、よって、前記ベクトルは、その等法線投影平面と略同一平面となり、
θ x は、X軸を中心として測定される実際の回転角(単位度)であり、
c 1 =p 1 、
c 2 =V adjust 、
c 3 =p 2 -p 1 、
c 4 =p 4 -p 3 、
c 5 =p 3 、
であり、
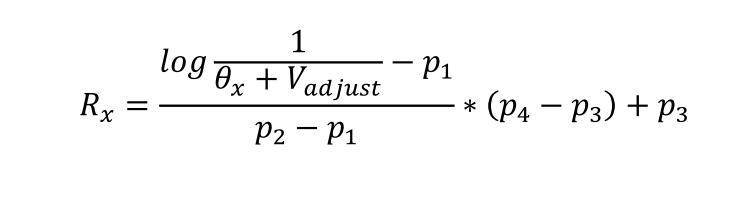
R x は、各距離dのθ x 値についてモデリングされて、以下のようなd i 、θ xi およびR xi の値セットが得られ、
[数3]
ここで、
[数4]
であり、
V adjust は、シミュレーションによって得られる近似されたR x 値と、前記システムによって計算されるR x 値との誤差を最小化するための調整変数であり、
前記一体式制御ユニットは、さらに、前記正規化されたベクトルから投与量設定値を計算するように構成される、投与量制御システム。 - 前記一体式制御ユニットは、前記少なくとも第1および第2の磁場測定手段のための補正されたオフセット値を計算するように構成される、請求項1に記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、前記取り外し可能に取り付け可能なハウジング内へ前記薬物送達本体の前記近位端に隣接して位置決めされる、請求項1または2のいずれか一項に記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、前記取り外し可能に取り付け可能なハウジング内へ前記近位端から遠位に位置決めされる、請求項1または2のいずれかに記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、前記取り外し可能に取り付け可能なハウジング内へ位置決めされる支持構造体上に位置決めされる、請求項1~4のいずれか一項に記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、前記略円板形の直径方向単一双極子磁石と軸方向にアラインされていない、請求項1~5のいずれか一項に記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、磁力計であり、前記第1の磁力計および前記第2の磁力計は、前記略円板形の直径方向単一双極子磁石が前記薬物送達本体の前記長手方向軸を中心として回転されるにつれて生成される磁場を同時に、かつ独立して測定するように構成される、請求項1~6のいずれか一項に記載の投与量制御システム。
- 前記少なくとも第1および第2の磁場測定手段は、さらに、前記略円板形の直径方向単一双極子磁石が前記薬物送達本体の前記長手方向軸に沿って平行移動するにつれて生成される磁場を測定するように構成される、請求項1~7のいずれか一項に記載の投与量制御システム。
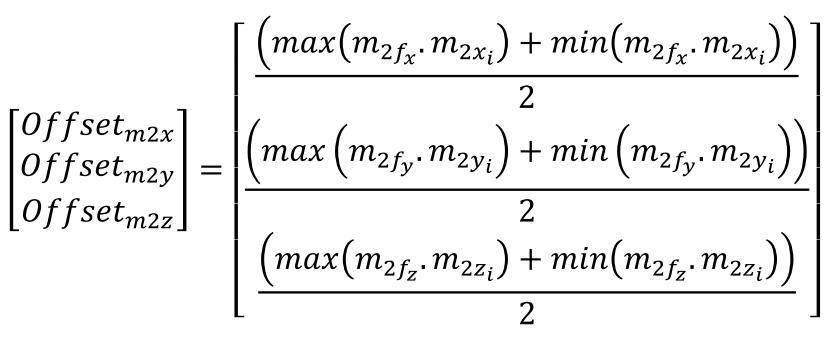
- 前記一体式制御ユニットは、さらに、前記少なくとも第1および第2の磁場測定手段のオフセット値を次式、
[数5]

を介して計算するように構成され、ここで、x、y、zは、磁場の直交する3軸であり、
xi、yiおよびziは、前記測定磁場の対応するベクトルにより生成される、3次元における点のクラウドに似た一連の点であり、前記点のクラウドは、因数、
[数6]

によってスフェリサイズ(sphericize)される、請求項1~8のいずれか一項に記載の投与量制御システム。 - 前記一体式制御ユニットは、さらに、磁気オフセット値を、次式、
[数7]
を介して補正するように構成される、請求項9に記載の投与量制御システム。 - 前記一体式制御ユニットは、さらに、前記少なくとも第1および第2の磁場測定手段により測定される磁場値を、前記少なくとも第1および第2の磁場測定手段の前記略円板形の直径方向単一双極子磁石に対する非軸方向アラインメントの関数として補正するように構成される、請求項1~10のいずれか一項に記載の投与量制御システム。
- 前記一体式制御ユニットは、低い、および高いカットオフ値を適用して、処理中に取得されるRx値を制限するように構成される、請求項11に記載の投与量制御システム。
- 前記低い、および高いカットオフ値は、機能システムの動作限界において、各々関数min(θx)およびmax(θx)を介して取得される、請求項12に記載の投与量制御システム。
- 前記投与量制御システムは、さらに、前記一体式制御ユニットからの情報のリモートおよび/またはローカルデータ処理システムへの通信を可能にするように構成される通信手段を備える、請求項1~13のいずれか一項に記載の投与量制御システム。
- 前記リモートおよび/またはローカルデータ処理システムは、スマートフォンアプリケーションを含む、請求項14に記載の投与量制御システム。
- 前記投与量制御システムは、さらに、リモートおよび/またはローカルデータ処理システムへ通信される一意の識別子を含む、請求項1~15のいずれか一項に記載の投与量制御システム。
- 前記投与量制御システムは、温度検出手段をさらに備える、請求項1~16のいずれか一項に記載の投与量制御システム。
- 前記投与量制御システムは、時間決定手段をさらに備える、請求項1~17のいずれか一項に記載の投与量制御システム。
- 前記投与量制御システムは、自律電源手段をさらに備える、請求項1~18のいずれか一項に記載の投与量制御システム。
- 前記略円板形の直径方向単一双極子磁石の磁場の強さおよび前記少なくとも第1および第2の磁場測定手段の位置合わせは、前記第1の磁場測定手段で測定される値と前記第2の磁場測定手段で測定される値との間に少なくとも100マイクロテスラ(μT)の差が存在するように構成される、請求項1~19のいずれか一項に記載の投与量制御システム。
- 請求項1~20のいずれか一項に記載の投与量制御システムにおいて投与量設定を計算するための方法であって、
回転可能な略円板形の直径方向単一双極子磁石により生成される磁場(CM)を、前記略円板形の直径方向単一双極子磁石の回転軸に対して変位される軸方向アラインメントで配置される少なくとも第1の磁力計(m1)および第2の磁力計(m2)によって測定するステップと、
結果的に生じる磁場擬似ベクトル(CR)を計算するステップと、
任意選択により、前記測定された磁場CMm1およびCMm2を補正するステップと、
前記磁場擬似ベクトルについて、投影の等法線平面に対する回転角を計算するステップと、
前記回転角を有する前記磁場擬似ベクトルを変換して、回転および投影により、等法線が補正された磁場擬似ベクトル(CR2)を生成するステップと、
前記等法線が補正された磁場擬似ベクトルから、前記回転軸を中心とする前記略円板形の直径方向単一双極子磁石の回転角を計算するステップとを含む、投与量設定を計算するための方法。 - 前記方法は、さらに、前記回転軸に沿った前記略円板形の直径方向単一双極子磁石の平行移動された位置に対応する前記略円板形の直径方向単一双極子磁石の法線上の基準位置を計算することを含む、請求項21に記載の方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021213678A JP7455107B2 (ja) | 2017-01-25 | 2021-12-28 | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/IB2017/000306 WO2018138542A1 (en) | 2017-01-25 | 2017-01-25 | Dose control system for injectable-drug delivery devices and associated methods of use |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021213678A Division JP7455107B2 (ja) | 2017-01-25 | 2021-12-28 | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020507429A JP2020507429A (ja) | 2020-03-12 |
| JP7204672B2 true JP7204672B2 (ja) | 2023-01-16 |
Family
ID=58530581
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019560497A Active JP7204672B2 (ja) | 2017-01-25 | 2017-01-25 | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 |
| JP2021213678A Active JP7455107B2 (ja) | 2017-01-25 | 2021-12-28 | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021213678A Active JP7455107B2 (ja) | 2017-01-25 | 2021-12-28 | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US12102807B2 (ja) |
| EP (1) | EP3573687A1 (ja) |
| JP (2) | JP7204672B2 (ja) |
| KR (1) | KR102681955B1 (ja) |
| CN (1) | CN110430905B (ja) |
| MX (1) | MX2019008559A (ja) |
| WO (1) | WO2018138542A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| LT3589340T (lt) | 2017-02-28 | 2026-01-12 | Eli Lilly And Company | Vaistų leidimo įrenginio dozės aptikimas ir vaistų identifikavimas |
| JP7204688B2 (ja) | 2017-06-09 | 2023-01-16 | サノフイ | 投与量検知用の電子機器 |
| JP7222985B2 (ja) | 2017-09-22 | 2023-02-15 | ノボ・ノルデイスク・エー/エス | 薬剤送達装置用アクセサリデバイス |
| DK3709888T3 (da) | 2017-11-14 | 2024-11-25 | Sanofi Sa | Integration af en ultralydssensor i en injektionsanordnings stempelstopper |
| WO2019096726A2 (en) | 2017-11-14 | 2019-05-23 | Sanofi | Conserving power in an injection device |
| EP3720525A1 (en) | 2017-12-04 | 2020-10-14 | Novo Nordisk A/S | Drug delivery system with multipolar magnet and sensor system |
| DK3755403T3 (da) | 2018-02-22 | 2024-09-23 | Lilly Co Eli | Medikamenttilførselsanordning med et registreret element |
| CN113164690B (zh) | 2018-12-04 | 2023-12-22 | 诺和诺德股份有限公司 | 具有移动传感器系统的药物递送组件 |
| CN113226409A (zh) | 2018-12-19 | 2021-08-06 | 赛诺菲 | 药物递送装置的药剂储器的光学配置 |
| US12370321B2 (en) | 2019-07-01 | 2025-07-29 | Sanofi | Awakening electronics in an injection device |
| JP7723081B2 (ja) | 2020-10-13 | 2025-08-13 | バイオコープ プロダクション ソシエテ パ アクシオンス シンプリフィエ | 磁気回転感知を伴う注入監視モジュール |
| EP4122513A1 (de) * | 2021-07-22 | 2023-01-25 | Ypsomed AG | Verbesserte betätigungsvorrichtung für einen pen |
| JP7829715B2 (ja) | 2022-03-31 | 2026-03-13 | バイオコープ プロダクション ソシエテ パ アクシオンス シンプリフィエ | 位置ロック・システムを有する注射モニタリング・モジュール |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012519025A (ja) | 2009-02-27 | 2012-08-23 | ライフスキャン・インコーポレイテッド | 薬物送達ペンのための医療モジュール |
| JP2012533058A (ja) | 2009-07-07 | 2012-12-20 | ムービング マグネット テクノロジーズ | 多周期的絶対位置検出器 |
| JP2014531283A (ja) | 2011-10-07 | 2014-11-27 | ノボ・ノルデイスク・エー/エス | 3軸磁気センサに基づいて要素の位置を決定するシステム |
| WO2015158230A1 (zh) | 2014-04-14 | 2015-10-22 | 江苏多维科技有限公司 | 一种使用磁电阻传感器的微型导螺杆泵及其制造方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2002064196A1 (en) | 2001-02-14 | 2002-08-22 | Novo Nordisk A/S | Electronically controlled injection or infusion device |
| US6929619B2 (en) * | 2002-08-02 | 2005-08-16 | Liebel-Flarshiem Company | Injector |
| DE10330984B4 (de) | 2003-07-09 | 2009-12-10 | Tecpharma Licensing Ag | Injektionsgerät mit Positionssensor |
| DE10330986B4 (de) | 2003-07-09 | 2010-01-07 | Tecpharma Licensing Ag | Berührungslose Abtastung mit magnetoresistivem Sensor |
| EP2011223B1 (en) * | 2006-04-12 | 2018-06-13 | Novo Nordisk A/S | Absolute position determination of movably mounted member in medication delivery device |
| JP5728231B2 (ja) | 2007-12-31 | 2015-06-03 | ノボ・ノルデイスク・エー/エス | 電子監視注射装置 |
| KR101939267B1 (ko) | 2010-07-21 | 2019-01-16 | 삼성전자주식회사 | 주사기의 주사량 측정 장치 및 방법 |
| EP2866862B1 (en) * | 2012-06-27 | 2016-05-04 | Sanofi-Aventis Deutschland GmbH | Drug delivery device |
| US10105497B2 (en) | 2013-04-05 | 2018-10-23 | Novo Nordisk A/S | Drug delivery device with integrated magnetic movement indicator |
| DK2981310T3 (en) | 2013-04-05 | 2017-10-16 | Novo Nordisk As | Dose monitoring apparatus for a drug delivery apparatus |
| CN203802882U (zh) * | 2014-04-14 | 2014-09-03 | 江苏多维科技有限公司 | 一种使用磁电阻传感器的微型导螺杆泵 |
| US10704944B2 (en) * | 2014-09-14 | 2020-07-07 | Becton, Dickinson And Company | System and method for capturing dose information |
| EP3058970A1 (en) * | 2015-02-19 | 2016-08-24 | Sanofi-Aventis Deutschland GmbH | Data collection device for attachment to an injection device |
| PT3419700T (pt) * | 2015-07-21 | 2023-12-12 | Biocorp Production SA | Dispositivo de controlo de dose para dispositivos de administração de fármaco injetável |
-
2017
- 2017-01-25 JP JP2019560497A patent/JP7204672B2/ja active Active
- 2017-01-25 KR KR1020197024396A patent/KR102681955B1/ko active Active
- 2017-01-25 US US16/479,782 patent/US12102807B2/en active Active
- 2017-01-25 EP EP17716594.1A patent/EP3573687A1/en active Pending
- 2017-01-25 WO PCT/IB2017/000306 patent/WO2018138542A1/en not_active Ceased
- 2017-01-25 CN CN201780088521.9A patent/CN110430905B/zh active Active
- 2017-01-25 MX MX2019008559A patent/MX2019008559A/es unknown
-
2021
- 2021-12-28 JP JP2021213678A patent/JP7455107B2/ja active Active
-
2024
- 2024-08-12 US US18/800,828 patent/US20240399068A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012519025A (ja) | 2009-02-27 | 2012-08-23 | ライフスキャン・インコーポレイテッド | 薬物送達ペンのための医療モジュール |
| JP2012533058A (ja) | 2009-07-07 | 2012-12-20 | ムービング マグネット テクノロジーズ | 多周期的絶対位置検出器 |
| JP2014531283A (ja) | 2011-10-07 | 2014-11-27 | ノボ・ノルデイスク・エー/エス | 3軸磁気センサに基づいて要素の位置を決定するシステム |
| WO2015158230A1 (zh) | 2014-04-14 | 2015-10-22 | 江苏多维科技有限公司 | 一种使用磁电阻传感器的微型导螺杆泵及其制造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7455107B2 (ja) | 2024-03-25 |
| CN110430905A (zh) | 2019-11-08 |
| BR112019015045A2 (pt) | 2020-03-10 |
| CA3051323A1 (en) | 2018-08-02 |
| KR102681955B1 (ko) | 2024-07-04 |
| JP2020507429A (ja) | 2020-03-12 |
| WO2018138542A1 (en) | 2018-08-02 |
| US12102807B2 (en) | 2024-10-01 |
| KR20190109474A (ko) | 2019-09-25 |
| CN110430905B (zh) | 2022-07-12 |
| US20240399068A1 (en) | 2024-12-05 |
| EP3573687A1 (en) | 2019-12-04 |
| JP2022046692A (ja) | 2022-03-23 |
| US20210330892A1 (en) | 2021-10-28 |
| MX2019008559A (es) | 2019-11-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7455107B2 (ja) | 注射可能な薬物送達デバイスの投与量制御システムおよび関連の使用方法 | |
| US12220565B2 (en) | Dose control system for injectable-drug delivery devices and associated methods of use | |
| US11511045B2 (en) | Dose control device for injectable-drug delivery devices | |
| US12070585B2 (en) | Dose control device for injectable-drug delivery devices | |
| CA3051323C (en) | Dose control system for injectable-drug delivery devices and associated methods of use | |
| JP7482964B2 (ja) | 注射可能な薬物送達デバイスのための投与量制御システム及び関連の使用方法 | |
| BR112019015045B1 (pt) | Sistema de controle de dose e método para calcular um ajuste de dose | |
| BR112020018521B1 (pt) | Dispositivo de controle de dose para um dispositivo de liberação de fármaco injetável | |
| BR112018001205B1 (pt) | Sistema de controle de dose adaptado para um dispositivo de entrega de fármaco injetável e método para melhorar a observância de tratamento em um regime de administração de fármaco injetável |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201225 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210322 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210524 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211228 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20211228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20211228 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220121 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220125 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20220311 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20220315 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20220511 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20220622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220916 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20221109 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20221206 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7204672 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |