JP7162188B2 - 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 - Google Patents
光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 Download PDFInfo
- Publication number
- JP7162188B2 JP7162188B2 JP2020566172A JP2020566172A JP7162188B2 JP 7162188 B2 JP7162188 B2 JP 7162188B2 JP 2020566172 A JP2020566172 A JP 2020566172A JP 2020566172 A JP2020566172 A JP 2020566172A JP 7162188 B2 JP7162188 B2 JP 7162188B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- vibration
- guide
- frame
- guide shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 70
- 230000002093 peripheral effect Effects 0.000 claims description 15
- 239000000463 material Substances 0.000 claims description 6
- 239000004519 grease Substances 0.000 claims description 4
- 230000007246 mechanism Effects 0.000 description 21
- 230000001133 acceleration Effects 0.000 description 16
- 230000004044 response Effects 0.000 description 12
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 230000003068 static effect Effects 0.000 description 5
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 206010024796 Logorrhoea Diseases 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 239000009719 polyimide resin Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/021—Mountings, adjusting means, or light-tight connections, for optical elements for lenses for more than one lens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/021—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors using intermittent driving, e.g. step motors, piezoleg motors
- H02N2/025—Inertial sliding motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0046—Movement of one or more optical elements for zooming
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0061—Driving means for the movement of one or more optical element using piezoelectric actuators
Description
例えば、特許文献1には、駆動軸と、駆動軸の第1端側が接着剤等を用いて固定された圧電素子と、駆動軸の第2端側を軸方向に平行に移動可能な状態で支持する支持部材と、駆動軸を含む駆動部が軸方向とは異なる方向の外力を受けた場合に駆動部に作用するべき外力の影響を緩和するために圧電素子に取り付けられた外力緩和支持部(バネ等)を備えた駆動装置について開示されている。
すなわち、上記公報に開示された駆動装置の構成では、駆動軸等へ軸方向とは異なる方向の外力を受けた場合でも、バネ等の外力緩和支持部によって外力の影響を緩和することができる。
本開示に係る光学機器用アクチュエータは、レンズを含む可動枠と、ガイド軸と、振動付与部と、ウェイトと、第1枠体と、第2枠体と、弾性部材と、を備えている。ガイド軸は、可動枠をレンズの光軸に沿って移動可能に支持する。振動付与部は、ガイド軸の第1端側に振動を付与する。ウェイトは、振動付与部に固定されている。第1枠体は、ガイド軸の第1端側に配置された振動付与部とウェイトとを支持する。第2枠体は、ガイド軸の第1端側とは反対の第2端側を固定された状態で支持する。弾性部材は、ガイド軸の第1端側に設けられており、ウェイトを介して、ガイド軸の第1端に対して、振動付与部を軸方向に沿って押圧する。
(発明の効果)
本開示に係る光学機器用アクチュエータによれば、ガイド軸の軸方向に交差する方向から付与される外力に起因する破損を防止しつつ、レンズの光軸調整を容易に実施することができる。
なお、出願人は、当業者が本開示を十分に理解するために添付図面および以下の説明を提供するのであって、これらによって特許請求の範囲に記載の主題を限定することを意図するものではない。
本開示の一実施形態に係る光学機器用アクチュエータを備えたレンズ鏡筒10について、図1~図11を用いて説明すれば以下の通りである。
(1)レンズ鏡筒の構成
本実施形態に係るレンズ鏡筒10は、図1に示すように、複数のレンズを含む光学系と、1群ユニット11と、2群ユニット12と、カム枠13と、3群・4群ユニット14と、5群ユニット16と、外装ユニット17と、ベースリング18とを備えている。そして、レンズ鏡筒10は、ベースリング18の部分において、カメラ本体(図示せず)のマウント部に装着される。
(1-1)光学系の構成
レンズ鏡筒10の光学系は、図2に示すように、1群ユニット11と、2群ユニット12と、カム枠13と、3群・4群ユニット14と、5群ユニット16と、外装ユニット17と、ベースリング18等によって構成されている。
これにより、複数のレンズの間の距離が変化して、広角撮影および望遠撮影を行うことができる。
カム枠13は、図2に示すように、円筒状の部材であって、カム溝が形成されている。カム枠13は、2群ユニット12と、3群・4群ユニット14の外周面側に配置される。そして3群・4群ユニット14の外周面に設けられたカムピンが、カム枠13のカム溝に嵌合される。
3群・4群ユニット14は、略円筒状の部材であって、複数のレンズを保持している。3群・4群ユニット14に含まれる複数のレンズは、図2に示すように、2群ユニット12に含まれる複数のレンズよりも光軸AX方向における像面側に配置される。また、3群・4群ユニット14は、図3に示すように、フォーカスレンズL11を保持している。フォーカスレンズL11は、3群・4群ユニット14に含まれる複数のレンズの中で、光軸AX方向における像面側に配置されている。さらに、3群・4群ユニット14は、図3に示すように、略円筒状の固定枠30の外周部に配置されたメインヨーク31および対向ヨーク34と、可動枠33に配置された駆動コイル33cとを含むように構成されている。これにより、3群・4群ユニット14は、駆動コイル33c等を含む駆動部によって駆動されることで、複数のレンズを保持した状態で、フォーカスレンズL11を含む可動枠33を光軸AX方向に前後に移動する。
5群ユニット16は、図2に示すように、1群ユニット11の内周面側に配置された略円筒状の部材である。5群ユニット16は、複数のレンズを保持している。また、5群ユニット16には、相対回転可能な状態でカム枠13が取り付けられる。
外装ユニット17は、図2に示すように、レンズ鏡筒10の外装部分を構成する円筒状の部材である。外装ユニット17の外周面には、円環状のフォーカスリング、ズームリング等が回転可能な状態で取り付けられている。
(1-2)3群・4群ユニット14の構成
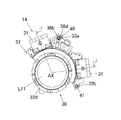
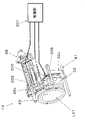
本実施形態のレンズ鏡筒10は、可動枠33によって保持されたフォーカスレンズL11を、光軸AX方向において前後に移動させるレンズユニットである。具体的には、レンズ鏡筒10を構成する3群・4群ユニット14が、図3に示すように、固定枠30、メインヨーク31、マグネット(駆動部)32(図6等参照)、可動枠33、主軸ガイド(ガイド軸)40、副軸ガイド41、対向ヨーク34、ガイド保持枠(第2枠体)35、振動付与機構36を備えている。
なお、図3~図8は、3群・4群ユニット14の構成を示している。図6は、図5のJ-J線断面図、図8は、図7のL-L線断面図である。
メインヨーク31は、図3および図6に示すように、側面から見て略U字状の部材であって、図5に示すように、固定枠30の外周面側に2つ設けられている。
主軸軸受部33aは、光軸AX方向に沿って本体部33dに形成された貫通穴であって、主軸ガイド40が挿入されている。
主軸ガイド40は、主軸軸受部33aに摺動可能に係合し、図3および図4に示すように、固定枠30に対して可動枠33を相対的に移動させる際のガイド部材として、光軸AX方向に沿って配置されている。そして、主軸ガイド40は、光軸AXの方向における第1端40aが、後述する振動付与機構36(圧電素子36a)に接続されている(図8および図9参照)。一方、第1端40aとは反対側の第2端40bが、ガイド保持枠35に形成された圧入穴35a(図10および図11参照)に固定された状態で支持されている。また、主軸ガイド40は、図4に示すように、可動枠33を移動させる際に、後述する振動付与機構36から図中の振動付与方向において所定の振動が付与される。
副軸ガイド41は、副軸軸受部33bに挿通され、図3および図4に示すように、主軸ガイド40に略平行に配置されている。そして、副軸ガイド41は、光軸AX方向における一方の端が固定枠30に保持され、その反対側の端部が後述するガイド保持枠35に保持される。そして、副軸ガイド41は、主軸ガイド40に沿って光軸AX方向において可動枠33が前後に移動する際に、主軸ガイド40とともに可動枠33の姿勢を維持できるように、可動枠33のガイド部材として機能する。
これにより、図6に示すように、マグネット32によって生じる径方向内側に向かう磁場と、駆動コイル33cを流れる電流とによって、可動枠33に図中Y軸方向(左方向)へのローレンツ力F1を発生させることができる。よって、駆動コイル33cに電流が流れることで、可動枠33は、光軸AX方向において前後に移動する。
本体部33dは、図5に示すように、中心部分においてフォーカスレンズL11を保持している。そして、本体部33dのフォーカスレンズL11を保持する部分の外周側に設けられた主軸軸受部33aおよび副軸軸受部33bには、主軸ガイド40および副軸ガイド41が挿通される。
ガイド保持枠35は、図3に示すように、可動枠33の光軸AX方向における被写体側とは反対側の像面側に配置されている。そして、ガイド保持枠35は、可動枠33の像面側の位置において、主軸ガイド40(第2端40b側)、および副軸ガイド41のそれぞれの端部を保持している。
ここで、3群・4群ユニット14のフォーカス制御について、説明する。
図16において、位置検出部202は、可動枠33に固定されたセンサマグネット203と、センサマグネット203に対向するように固定枠30に固定されたMR素子(図示せず)とで構成される。なお、位置検出部202は、エンコーダによって構成されていてもよく、固定枠30に対する可動枠33の位置を検出できるものであればよい。
制御部201は、位置検出部202から得られた可動枠33の現在の位置に基づいて、駆動コイル33cに駆動電流を流すことで、可動枠33を所望の位置に移動することができる。
本実施形態では、制御部201が、可動枠33の現在位置、速度に応じて、振動付与機構36の振動量、振動周波数を自在に変更可能な構成を有している。例えば、主軸ガイド軸の振動速度は、可動枠33の移動速度より大きいことが好ましい。
また、本実施形態では、制御部201は、可動枠33が移動するとき、振動付与部36は、機械強度の限界を超えない範囲で、主軸ガイド40が可動枠33の移動速度の2倍以上の速度で、振動するように制御する。
(1-3)振動付与機構36の構成
振動付与機構36は、図3および図4に示すように、主軸ガイド40に対して、主軸ガイド40の軸方向に略平行な方向に沿って振動を付与する機構であって、図7および図8に示すように、主軸ガイド40の被写体側の端部(第1端40a)が当接する位置に配置されている。そして、振動付与機構36は、図3に示すように、圧電素子36a、ウェイト36b、バネ36c、ホルダ(第1枠体)36d、および緩衝シート(緩衝材)36eを有している。
圧電素子36aは、電圧が印加されると力を発生させる圧電性を有する素子であって、交流電圧が印加されて伸縮を繰り返すことで、超音波振動を発生させる。そして、圧電素子36aは、可動枠33(本体部33d)と主軸ガイド40との間に生じる摩擦抵抗を低減するために、主軸ガイド40に対して所定の超音波振動を付与する超音波振動子として用いられる。
ここで、超音波振動により主軸ガイド40が振動する加速度をα、可動枠33の質量をmkとすると、可動枠33が主軸ガイド40と同じ加速度αで振動をするために必要な力は、α×mkとなる。また、主軸ガイド40から可動枠33に伝達できる力は、主軸ガイド40と可動枠33の間で作用する摩擦力Tとなる。
すなわち、可動枠33は、圧電素子36aによる主軸ガイド40の加速度αの振動に合わせて、加速度αで振動する。この時、可動枠33に伝達できる力(摩擦力T)は、可動枠33が加速度αで振動をするために必要な力(α×mk)と同じか、大きい。このため、主軸ガイド40の振動が同じ加速度αで可動枠33に伝わり、主軸ガイド40と可動枠33とは、略一体的に動き、相対的に滑らない。
すなわち、圧電素子36aによって主軸ガイド40が加速度αで振動しても、可動枠33は加速度αでは振動できず、振動しない、あるいは加速度αより小さな加速度で振動する。加速度αより小さな加速度で振動する場合は、可動枠33の振幅は、主軸ガイド40の振幅より小さくなる。この時、可動枠33に伝達できる力(摩擦力T)は、可動枠33が加速度αで振動するために必要な力(α×mk)より小さい。このため、主軸ガイド40の振動が同じ加速度αでは、可動枠33に伝わることができず、主軸ガイド40と可動枠33との間には、相対的な滑りが発生する。
つまり、T<α×mkの状態で圧電素子36aによる振動が続いている間は常に、主軸ガイド40と可動枠33の間では、動摩擦状態が維持される。一般的に、動摩擦力は、静止摩擦力よりも小さい。よって、動摩擦が発生している状態が維持されている場合には、静止摩擦が発生している状態よりも小さい駆動力で可動枠33を駆動することができる。


図13において、点線は、式(100)の計算結果、実線は、式(101)の計算結果を示している。図13で示されるように、式(100)、式(101)の特性は、W1、W2(10000Hzより低域に存在し、図示せず)に反共振点を持ち、W3、W4に共振点を持つ2次形式で表される特性を示す。本構成においては、以下の関係式を満たすように設定されている。
W2×10<W4
20×1000<W4/2π
50×1000<W3/2π
(上述の関係式において、W1,W2,W3,W4の単位はラジアン/秒である。)
図14は実際の振動付与部の特性で、実線は、主軸ガイド軸40の周波数応答特性を示し、点線は、ウェイト36bの特性を示す。
一方、点線は、実線と同様のピークを持つが、そのピーク間に理論計算値W1に対応する反共振点を持ち、振動応答性が抑制されている。
図15Aおよび図15Bにおける点線は目標値で、±2.3μmの三角波である。図15Aにおける実線は、振動を付与しないときの目標に対する可動枠33の応答値の測定波形である。図15Bにおける実線は、振動を付与したときの目標値に対する可動枠33の応答値の測定値である。ここで、示されるように本構成の振動付与機構36の振動付与により、約±2μmの制御目標に対してまったく追従しなかった可動枠33が、極めて高精度で微小な目標値に追従させることが可能となる。
なお、超音波振動とは、人間の耳には聞こえない高い振動数(例えば、振動数が20kHz以上の定常音として耳に感じない音)を持つ弾性振動波(音波)であって、広義の意味では、人が聞くこと以外の目的で利用される音を意味し、人間に聞こえるかどうかは問わない。
さらに、バネ36cの表面には、防振用のグリースが塗布されている。これにより、振動付与機構36の部分における防振性能を向上させることができる。
ホルダ36dは、図9および図10に示すように、有底状の略円筒状の部材であって、筒状の内部空間に、圧電素子36a、ウェイト36bおよびバネ36cを内包する。そして、ホルダ36dは、上述したように、底面において、内包されたバネ36cの被写体側の端部を支持している。さらに、ホルダ36dは、図10に示すように、固定枠30に形成された挿入孔30aの部分を覆うように、固定枠30に対して固定されている。
緩衝シート36eは、例えば、ポリイミド樹脂等によって形成されたシート状の部材であって、図9および図10に示すように、主軸ガイド40の第1端40a側(被写体側)の端面と、圧電素子36aの像面側の端面との間において、バネ36cの付勢力によって保持されている。そして、緩衝シート36eを介して、主軸ガイド40の第1端40a側の端面とこれに対向する圧電素子36aの端面とが接続されている。
本実施形態では、以上のように、フォーカスレンズL11を含む可動枠33を光軸AX方向において前後に移動させる光学機器用アクチュエータとして、フォーカスレンズL11を含む可動枠33、主軸ガイド40、圧電素子36a、ウェイト36b、固定枠30、ガイド保持枠35、バネ36cを備えている。主軸ガイド40は、可動枠33をフォーカスレンズL11の光軸AX方向に沿って移動可能に支持する。圧電素子36aは、主軸ガイド40の第1端40a側に振動を付与する。ウェイト36bは、圧電素子36aに固定されている。固定枠30は、主軸ガイド40の第1端40a側に配置された圧電素子36aとウェイト36bとを支持する。ガイド保持枠35は、主軸ガイド40の第1端40a側とは反対の第2端40b側を固定された状態で支持する。バネ36cは、主軸ガイド40の第1端40a側に設けられており、ウェイト36bを介して、主軸ガイド40の第1端40aに対して圧電素子36aを軸方向に沿って押圧する。
このため、例えば、主軸ガイド40の軸方向に交差する方向から外力が付与された場合において、主軸ガイド40の第1端40a側は、バネ36cの弾性によって軸方向に交差する方向に移動する。
また、主軸ガイド40の第2端40b側が、ガイド保持枠35において固定された状態で支持されている。
これにより、従来のフローティング構造と比較して、主軸ガイド40の第2端40b側を固定支持して主軸ガイド40を安定的に支持することができるため、フォーカスレンズL11を含む複数のレンズの光軸AXの調整を容易に実施することができる。
また、本実施形態では、上述したように、主軸ガイド40の第1端40a側が、固定枠30に形成された挿入孔30aに、円環状の隙間dを介して挿入されている。
これにより、主軸ガイド40の第2端40b側がガイド保持枠35に圧入固定された構成において、主軸ガイド40の軸方向に交差する方向から外力が付与された場合でも、主軸ガイド40の第1端40a側の端面と圧電素子36aの端面との接続部分に係るせん断応力を、緩衝シート36eによって吸収することで、接続部分の破壊をより効果的に防止することができる。
さらにまた、本実施形態では、ガイド保持枠35が、図10および図11に示すように、主軸ガイド40の第2端40bを圧入固定する圧入穴35aの周囲に形成された環状の溝部35bを有している。
このため、主軸ガイド40に対して軸方向に交差する方向から外力が付与された場合において、第2端40bを支持する圧入穴35a付近が変形することで、圧入穴35aを支点にして主軸ガイド40が光軸AXの方向に動きやすい状態を形成することができる。そして、上述したように、主軸ガイド40の第1端40a側がバネ36cを介して支持されている。
また、主軸ガイド40の第2端40b側が圧入支持される圧入穴35aの周囲の部分が、環状の溝部35bによって薄肉形状になるため、主軸ガイド40に付与される振動を吸収することができる。
[他の実施形態]
以上、本開示の一実施形態について説明したが、本開示は上記実施形態に限定されるものではなく、開示の要旨を逸脱しない範囲で種々の変更が可能である。
上記実施形態では、主軸ガイド40の第1端40a側の端面とこれに対向する圧電素子36aの端面との間に、緩衝シート36eが設けられた例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
例えば、主軸ガイド40の第1端40a側の端面とこれに対向する圧電素子36aの端面とが、接着剤によって固定された構成であってもよい。
(B)
上記実施形態では、主軸ガイド40の第2端40b側が、ガイド保持枠35の圧入穴35aに対して圧入固定された例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
(C)
上記実施形態では、複数のレンズ群を備えたレンズ鏡筒10に含まれる3群・4群ユニット14に対して、本開示の光学機器用アクチュエータを適用した例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
(D)
上記実施形態では、振動付与機構36から主軸ガイド40に対して、主軸ガイド40の軸方向に略平行な方向に沿って振動が付与される例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
(E)
上記実施形態では、振動付与機構36から主軸ガイド40に対して超音波振動が付与される例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
また、振動付与部から付与される超音波振動は、上記実施形態で説明した20kHz~60kHzの範囲に限らず、範囲外の超音波振動が付与されてもよい。
上記実施形態では、弾性部材として、ソレノイドバネを用いた例を挙げて説明した。しかし、本開示はこれに限定されるものではない。
例えば、ソレノイドバネ以外に、板ばね等の他の弾性部材を用いてもよい。すなわち、弾性部材は、ガイド軸を軸方向に沿って押圧するものであれば、特に限定されるものではない。
上記実施形態では、第1枠体としての固定枠30の一部と、第2枠体としてのガイド保持枠35とが別々の部材として設けられた構成を例として挙げて説明した。しかし、本開示はこれに限定されるものではない。
例えば、第1枠体と第2枠体とが一体化された構成であってもよい。
上記実施形態では、バネ36cに防振用のグリースが塗布された例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、バネ等の弾性部材への防振用のグリースの塗布は必須ではなく、塗布されていない構成であってもよい。
11 1群ユニット
12 2群ユニット
13 カム枠
14 3群・4群ユニット
16 5群ユニット
17 外装ユニット
18 ベースリング
30 固定枠(第1枠体)
30a 挿入孔
31 メインヨーク
32 マグネット(駆動部)
33 可動枠
33a 主軸軸受部
33b 副軸軸受部
33c 駆動コイル(駆動部)
33d 本体部
34 対向ヨーク
35 ガイド保持枠(第2枠体)
35a 圧入穴
35b 溝部
36 振動付与機構
36a 圧電素子(振動付与部)
36b ウェイト
36ba フランジ部
36c バネ(弾性部材)
36d ホルダ(第1枠体)
36e 緩衝シート(緩衝材)
40 主軸ガイド(ガイド軸)
40a 第1端
40b 第2端
41 副軸ガイド
AX 光軸
d 隙間
F1 ローレンツ力
L11 フォーカスレンズ
M 磁力
Claims (13)
- レンズを含む可動枠と、
前記可動枠を前記レンズの光軸に沿って移動可能に支持するガイド軸と、
前記ガイド軸の第1端側に振動を付与する振動付与部と、
前記振動付与部に固定されたウェイトと、
前記ガイド軸の前記第1端側に配置された前記振動付与部と前記ウェイトとを支持する第1枠体と、
前記ガイド軸の前記第1端側とは反対の第2端側を固定された状態で支持する第2枠体と、
前記ガイド軸の前記第1端側に設けられており、前記ウェイトを介して、前記ガイド軸の前記第1端に対して、前記振動付与部を軸方向に沿って押圧する弾性部材と、
を備えている光学機器用アクチュエータ。 - 前記ガイド軸の前記第1端と前記振動付与部との間に配置された緩衝材をさらに備えている、
請求項1に記載の光学機器用アクチュエータ。 - 前記緩衝材は、シート状に形成されている、
請求項2に記載の光学機器用アクチュエータ。 - 前記第2枠体は、前記ガイド軸の前記第2端が圧入によって固定支持される圧入穴を有している、
請求項1から3のいずれか1項に記載の光学機器用アクチュエータ。 - 前記第2枠体は、前記圧入穴の外周側に、前記圧入穴と同心円状に形成された溝部を、さらに有している、
請求項4に記載の光学機器用アクチュエータ。 - 前記弾性部材は、前記ウェイトと前記第1枠体との間に配置されている、
請求項1から5のいずれか1項に記載の光学機器用アクチュエータ。 - 前記弾性部材は、ソレノイドバネである、
請求項1から6のいずれか1項に記載の光学機器用アクチュエータ。 - 前記弾性部材には、防振用のグリースが塗布されている、
請求項1から7のいずれか1項に記載の光学機器用アクチュエータ。 - 前記振動付与部における前記ガイド軸と接続された側とは反対側の第1端は、前記ウェイトに対して接着固定されている、
請求項1から8のいずれか1項に記載の光学機器用アクチュエータ。 - 前記振動付与部は、前記ガイド軸の前記第1端に対して、前記ガイド軸の軸方向に沿って振動を付与する、
請求項1から9のいずれか1項に記載の光学機器用アクチュエータ。 - 前記振動付与部は、圧電素子である、
請求項1から10のいずれか1項に記載の光学機器用アクチュエータ。 - 前記レンズは、フォーカスレンズである、
請求項1から11のいずれか1項に記載の光学機器用アクチュエータ。 - 請求項1から12のいずれか1項に記載の光学機器用アクチュエータと、
前記レンズと前記光軸方向を合わせて配置された複数のレンズ群と、
を備えたレンズ鏡筒。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019006701 | 2019-01-18 | ||
| JP2019006701 | 2019-01-18 | ||
| PCT/JP2019/050347 WO2020149108A1 (ja) | 2019-01-18 | 2019-12-23 | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2020149108A1 JPWO2020149108A1 (ja) | 2021-11-11 |
| JPWO2020149108A5 JPWO2020149108A5 (ja) | 2022-04-20 |
| JP7162188B2 true JP7162188B2 (ja) | 2022-10-28 |
Family
ID=71614361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020566172A Active JP7162188B2 (ja) | 2019-01-18 | 2019-12-23 | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20220163752A1 (ja) |
| EP (1) | EP3913415A4 (ja) |
| JP (1) | JP7162188B2 (ja) |
| CN (1) | CN113272701B (ja) |
| WO (1) | WO2020149108A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11480756B2 (en) * | 2020-12-14 | 2022-10-25 | Karl Storz Imaging, Inc. | Two-speed focusing mechanism |
| WO2023203793A1 (ja) * | 2022-04-18 | 2023-10-26 | パナソニックIpマネジメント株式会社 | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004297920A (ja) | 2003-03-27 | 2004-10-21 | Minolta Co Ltd | 駆動装置 |
| JP2007049874A (ja) | 2005-08-12 | 2007-02-22 | Fujinon Corp | アクチュエータ |
| JP2010074912A (ja) | 2008-09-17 | 2010-04-02 | Konica Minolta Opto Inc | 超音波モータ |
| JP2012189711A (ja) | 2011-03-09 | 2012-10-04 | Olympus Imaging Corp | アダプタレンズ装置およびレンズ鏡筒 |
| WO2014091656A1 (ja) | 2012-12-12 | 2014-06-19 | コニカミノルタ株式会社 | 駆動装置および撮像装置 |
| WO2014174750A1 (ja) | 2013-04-24 | 2014-10-30 | コニカミノルタ株式会社 | 駆動装置およびこれを用いた撮像装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4906326B2 (ja) * | 2005-11-30 | 2012-03-28 | 富士フイルム株式会社 | 駆動装置及び駆動装置の製造方法 |
| JP5895985B2 (ja) * | 2014-08-07 | 2016-03-30 | Tdk株式会社 | 圧電駆動装置 |
| JP6565964B2 (ja) * | 2017-04-05 | 2019-08-28 | Tdk株式会社 | 圧電アクチュエータ |
-
2019
- 2019-12-23 WO PCT/JP2019/050347 patent/WO2020149108A1/ja unknown
- 2019-12-23 EP EP19910219.5A patent/EP3913415A4/en active Pending
- 2019-12-23 US US17/421,597 patent/US20220163752A1/en active Pending
- 2019-12-23 JP JP2020566172A patent/JP7162188B2/ja active Active
- 2019-12-23 CN CN201980087211.4A patent/CN113272701B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004297920A (ja) | 2003-03-27 | 2004-10-21 | Minolta Co Ltd | 駆動装置 |
| JP2007049874A (ja) | 2005-08-12 | 2007-02-22 | Fujinon Corp | アクチュエータ |
| JP2010074912A (ja) | 2008-09-17 | 2010-04-02 | Konica Minolta Opto Inc | 超音波モータ |
| JP2012189711A (ja) | 2011-03-09 | 2012-10-04 | Olympus Imaging Corp | アダプタレンズ装置およびレンズ鏡筒 |
| WO2014091656A1 (ja) | 2012-12-12 | 2014-06-19 | コニカミノルタ株式会社 | 駆動装置および撮像装置 |
| WO2014174750A1 (ja) | 2013-04-24 | 2014-10-30 | コニカミノルタ株式会社 | 駆動装置およびこれを用いた撮像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020149108A1 (ja) | 2021-11-11 |
| EP3913415A1 (en) | 2021-11-24 |
| EP3913415A4 (en) | 2022-03-16 |
| WO2020149108A1 (ja) | 2020-07-23 |
| CN113272701A (zh) | 2021-08-17 |
| CN113272701B (zh) | 2023-02-03 |
| US20220163752A1 (en) | 2022-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101258309B1 (ko) | 초음파 리드 스크류 모터를 포함하는 기구 | |
| JP7162188B2 (ja) | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 | |
| JP7336740B2 (ja) | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 | |
| JP2006330053A (ja) | レンズ鏡胴 | |
| JP2018124541A (ja) | 駆動装置、光学機器及び撮像装置 | |
| EP1983590A2 (en) | Method of driving a driving device | |
| US20170207725A1 (en) | Vibration-type actuator that moves vibrating body and driven body relatively to each other, and electronic apparatus | |
| US11336211B2 (en) | Vibration wave motor and driving apparatus using vibration wave motor | |
| JP2012029495A (ja) | 駆動装置 | |
| JP6025446B2 (ja) | 振動型アクチュエータ、撮像装置および、振動型アクチュエータを備えた装置 | |
| JP2003324979A (ja) | 駆動機構 | |
| WO2009157405A1 (ja) | 振動アクチュエータ、それを備えるレンズ鏡筒及びカメラ | |
| JP7352902B2 (ja) | レンズ鏡筒およびこれを備えた撮像装置 | |
| JP6529279B2 (ja) | 振動型駆動装置、レンズ鏡筒及び撮像装置 | |
| JP2012227988A (ja) | 振動型リニアアクチュエータとそれを有する光学機器 | |
| WO2023203793A1 (ja) | 光学機器用アクチュエータおよびこれを備えたレンズ鏡筒 | |
| US20220099915A1 (en) | Vibration-type driving apparatus and apparatus having the same | |
| JP7313909B2 (ja) | 振動波モータおよび電子機器。 | |
| JP2018066958A (ja) | 光学装置、投影光学系、露光装置及び物品の製造方法 | |
| WO2016002917A1 (ja) | 振動型アクチュエータ、レンズ鏡筒、撮像装置及び自動ステージ | |
| KR100752698B1 (ko) | 압전 구동기 및 이를 포함하는 렌즈 구동 장치 | |
| JP4677145B2 (ja) | 画像読取装置及び画像形成装置 | |
| JP6537482B2 (ja) | 振動波モータおよび電子機器 | |
| JP6812510B2 (ja) | 振動型アクチュエータ及びそれを有する電子機器 | |
| JP6753756B2 (ja) | 駆動装置、及びカメラモジュール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220412 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220831 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220913 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220930 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7162188 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |