JP7096896B2 - ビデオ符号化のための方法及び装置 - Google Patents
ビデオ符号化のための方法及び装置 Download PDFInfo
- Publication number
- JP7096896B2 JP7096896B2 JP2020546101A JP2020546101A JP7096896B2 JP 7096896 B2 JP7096896 B2 JP 7096896B2 JP 2020546101 A JP2020546101 A JP 2020546101A JP 2020546101 A JP2020546101 A JP 2020546101A JP 7096896 B2 JP7096896 B2 JP 7096896B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- video
- motion vector
- prediction
- picture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 85
- 230000033001 locomotion Effects 0.000 claims description 121
- 239000013598 vector Substances 0.000 claims description 92
- 238000002372 labelling Methods 0.000 claims description 4
- 238000004590 computer program Methods 0.000 claims 1
- 239000000523 sample Substances 0.000 description 55
- 238000012545 processing Methods 0.000 description 50
- 230000002457 bidirectional effect Effects 0.000 description 41
- 230000006835 compression Effects 0.000 description 27
- 238000007906 compression Methods 0.000 description 27
- 230000008569 process Effects 0.000 description 18
- 239000000872 buffer Substances 0.000 description 17
- 238000006243 chemical reaction Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 13
- 238000004891 communication Methods 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 11
- 238000004458 analytical method Methods 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 9
- 238000009795 derivation Methods 0.000 description 8
- 238000013139 quantization Methods 0.000 description 7
- 239000000284 extract Substances 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000002123 temporal effect Effects 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 2
- 241000282412 Homo Species 0.000 description 2
- 101100537098 Mus musculus Alyref gene Proteins 0.000 description 2
- 101150095908 apex1 gene Proteins 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000013403 standard screening design Methods 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000000454 anti-cipatory effect Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000013074 reference sample Substances 0.000 description 1
- 238000007670 refining Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description


JEM:共同探索モデル
VVC:多機能ビデオ符号化
BMS:ベンチマークセット
MV:動きベクトル
HEVC:高効率ビデオ符号化
SEI:補充強化情報
VUI:ビデオユーザビリティ情報
GOP:ピクチャグループ
TU:変換ユニット
PU:予測ユニット
CTU:符号化ツリーユニット
CTB:符号化ツリーブロック
PB:予測ブロック
HRD:仮想参照復号器
SNR:信号対雑音比
CPU:中央処理ユニット
GPU:グラフィック処理ユニット
CRT:陰極線管
LCD:液晶ディスプレイ
OLED:有機発光ダイオード
CD:コンパクトディスク
DVD:デジタルビデオディスク
ROM:読み取り専用メモリ
RAM:ランダムアクセスメモリ
ASIC:特定用途向け集積回路
PLD:プログラマブルロジックデバイス
LAN:ローカルエリアネットワーク
GSM:グローバルモバイルシステムオブシステム
LTE:ロングタームエボリューション
CANBus:コントローラエリアネットワークバス
USB:ユニバーサルシリアルバス
PCI:周辺コンポーネント相互接続
FPGA:フィールドプログラム可能なゲートアレイ
SSD:ソリッドステートドライブ
IC:集積回路
CU:符号化ユニット
Claims (7)
- 復号器においてビデオ復号化を行うための方法であって、
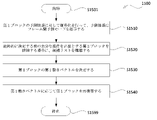
符号化ビデオビットストリームから現在ピクチャにおける第1ブロックの第1予測情報を復号化するステップと、
フレーム間予測モードに基づいて前記第1ブロックが符号化されていることを前記第1予測情報が示す場合、前記第1ブロックの第1動きベクトルを決定するステップと、
前記第1ブロックの前記第1動きベクトルに基づいて、前記第1ブロックを再構築するステップと、
前記符号化ビデオビットストリームから前記現在ピクチャにおける第2ブロックの第2予測情報を復号化するステップと、
前記フレーム間予測モードに基づいて前記第2ブロックが符号化されていることを前記第2予測情報が示す場合、
前記第1ブロックと前記第2ブロックとの復号化の順序に基づいて、前記第1ブロックの前記第1動きベクトルを含まない候補動きベクトル予測値のリストを構築し、
前記候補動きベクトル予測値のリストに基づき、前記第2ブロックの第2動きベクトルを決定することによって、
前記第2ブロックの前記第2動きベクトルを決定するステップと、
前記第2ブロックの前記第2動きベクトルに基づいて、前記第2ブロックを再構築するステップとを含み、
さらに、前記第1ブロックがマージモードとスキップモードのうちの1つにあるとともに、復号化の順序で前記第2ブロックより前にある場合、前記第1ブロックからの候補動きベクトル予測値を利用不能として標識するステップを含む方法。
- さらに、前記第1ブロックからの前記候補動きベクトル予測値を利用不能として標識した後、前記第1ブロックと前記第2ブロックとが異なる符号化ツリーユニットに属する場合、前記第1ブロックからの前記候補動きベクトル予測値を利用可能として標識するステップを含む請求項1に記載の方法。
- さらに、前記第1ブロックからの前記候補動きベクトル予測値を利用不能として標識した後、前記第1ブロックと前記第2ブロックとが異なるスライスに属する場合、前記第1ブロックからの前記候補動きベクトル予測値を利用可能として標識するステップを含む請求項1に記載の方法。
- さらに、前記第1ブロックからの前記候補動きベクトル予測値を利用不能として標識した後、前記第1ブロックと前記第2ブロックとが異なるタイルに属する場合、前記第2ブロックからの前記候補動きベクトル予測値を利用可能として標識するステップを含む請求項1に記載の方法。
- さらに、前記第1ブロックの隣接ブロックからの動きベクトル予測値によって、前記第1ブロックからの前記候補動きベクトル予測値を置き換えるステップを含む請求項1に記載の方法。
- ビデオ復号化のための装置であって、
プロセッサ及びメモリを含み、
前記プロセッサは、前記メモリに記憶されたプログラムをロードして実行することにより、請求項1乃至5のうちいずれか1項に記載の方法を実現する、装置。 - コンピュータがビデオ復号化を行う場合、前記コンピュータに、請求項1乃至5のうちいずれか1項に記載の方法を実行させるコンピュータプログラム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862679642P | 2018-06-01 | 2018-06-01 | |
| US62/679,642 | 2018-06-01 | ||
| US16/203,145 | 2018-11-28 | ||
| US16/203,145 US10469869B1 (en) | 2018-06-01 | 2018-11-28 | Method and apparatus for video coding |
| PCT/US2019/032672 WO2019231706A1 (en) | 2018-06-01 | 2019-05-16 | Method and apparatus for video coding |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021517392A JP2021517392A (ja) | 2021-07-15 |
| JP2021517392A5 JP2021517392A5 (ja) | 2021-08-26 |
| JP7096896B2 true JP7096896B2 (ja) | 2022-07-06 |
Family
ID=68392128
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020546101A Active JP7096896B2 (ja) | 2018-06-01 | 2019-05-16 | ビデオ符号化のための方法及び装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10469869B1 (ja) |
| EP (1) | EP3804330A4 (ja) |
| JP (1) | JP7096896B2 (ja) |
| KR (1) | KR102458138B1 (ja) |
| CN (1) | CN112106371B (ja) |
| WO (1) | WO2019231706A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118714349A (zh) * | 2018-04-06 | 2024-09-27 | 艾锐势有限责任公司 | 减少双向时间预测中的运动矢量信息传输 |
| WO2019234676A1 (en) | 2018-06-07 | 2019-12-12 | Beijing Bytedance Network Technology Co., Ltd. | Mv precision refine |
| JP7141463B2 (ja) * | 2018-06-27 | 2022-09-22 | エルジー エレクトロニクス インコーポレイティド | インター予測モードに基づいた映像処理方法およびそのための装置 |
| TWI719519B (zh) | 2018-07-02 | 2021-02-21 | 大陸商北京字節跳動網絡技術有限公司 | 對於dmvr的塊尺寸限制 |
| CN113727103B (zh) * | 2020-05-25 | 2022-08-12 | 腾讯科技(深圳)有限公司 | 视频编码、解码方法、装置、电子设备及存储介质 |
| US12219166B2 (en) | 2021-03-12 | 2025-02-04 | Lemon Inc. | Motion candidate derivation with search order and coding mode |
| US11671616B2 (en) | 2021-03-12 | 2023-06-06 | Lemon Inc. | Motion candidate derivation |
| US11936899B2 (en) * | 2021-03-12 | 2024-03-19 | Lemon Inc. | Methods and systems for motion candidate derivation |
| US12114009B2 (en) * | 2021-09-22 | 2024-10-08 | Tencent America LLC | Method and apparatus for adaptive reordering for reference frames |
| WO2023132509A1 (ko) * | 2022-01-04 | 2023-07-13 | 현대자동차주식회사 | 공간적 상관성을 이용하는 디코더측 움직임벡터 유도를 위한 방법 |
| US11616970B1 (en) * | 2022-01-25 | 2023-03-28 | Mediatek Inc. | Motion vector refinement apparatus having motion vector predictor derivation circuit that is allowed to start new task without waiting for motion vector difference computation and associated motion vector refinement method |
| KR20230141648A (ko) * | 2022-03-31 | 2023-10-10 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장하는 기록 매체 |
| WO2023191587A1 (ko) * | 2022-04-01 | 2023-10-05 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장하는 기록 매체 |
| WO2024210904A1 (en) * | 2023-04-07 | 2024-10-10 | Google Llc | Template matching using available peripheral pixels |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012191513A (ja) | 2011-03-11 | 2012-10-04 | Sony Corp | 画像処理装置および方法 |
| JP2013016930A (ja) | 2011-06-30 | 2013-01-24 | Jvc Kenwood Corp | 画像符号化装置、画像符号化方法及び画像符号化プログラム |
| JP2013034186A (ja) | 2011-06-30 | 2013-02-14 | Jvc Kenwood Corp | 画像符号化装置、画像符号化方法および画像符号化プログラム |
| US20130202037A1 (en) | 2012-02-08 | 2013-08-08 | Xianglin Wang | Restriction of prediction units in b slices to uni-directional inter prediction |
| US20130243093A1 (en) | 2012-03-16 | 2013-09-19 | Qualcomm Incorporated | Motion vector coding and bi-prediction in hevc and its extensions |
| US20140146890A1 (en) | 2010-12-21 | 2014-05-29 | Yi-Jen Chiu | System and method for enhanced dmvd processing |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3263807B2 (ja) * | 1996-09-09 | 2002-03-11 | ソニー株式会社 | 画像符号化装置および画像符号化方法 |
| KR100708091B1 (ko) * | 2000-06-13 | 2007-04-16 | 삼성전자주식회사 | 양방향 움직임 벡터를 이용한 프레임 레이트 변환 장치 및그 방법 |
| JP4114859B2 (ja) * | 2002-01-09 | 2008-07-09 | 松下電器産業株式会社 | 動きベクトル符号化方法および動きベクトル復号化方法 |
| KR100956910B1 (ko) * | 2002-07-02 | 2010-05-11 | 파나소닉 주식회사 | 움직임 벡터 도출 방법, 동화상 부호화 방법, 및 동화상복호화 방법 |
| US7724827B2 (en) * | 2003-09-07 | 2010-05-25 | Microsoft Corporation | Multi-layer run level encoding and decoding |
| JP2010503264A (ja) * | 2006-08-28 | 2010-01-28 | トムソン ライセンシング | デコードされたビデオブロック内の予期される歪みを判定する方法および装置 |
| JP5194833B2 (ja) * | 2008-01-23 | 2013-05-08 | ソニー株式会社 | 符号化装置および方法、記録媒体、並びにプログラム |
| US9060176B2 (en) * | 2009-10-01 | 2015-06-16 | Ntt Docomo, Inc. | Motion vector prediction in video coding |
| US8885711B2 (en) * | 2009-12-17 | 2014-11-11 | Sk Telecom Co., Ltd. | Image encoding/decoding method and device |
| US20110176611A1 (en) * | 2010-01-15 | 2011-07-21 | Yu-Wen Huang | Methods for decoder-side motion vector derivation |
| EP2559243B1 (en) * | 2010-04-13 | 2014-08-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | A video decoder and a video encoder using motion-compensated prediction |
| US9049452B2 (en) | 2011-01-25 | 2015-06-02 | Mediatek Singapore Pte. Ltd. | Method and apparatus for compressing coding unit in high efficiency video coding |
| TW201246943A (en) * | 2011-01-26 | 2012-11-16 | Panasonic Corp | Video image encoding method, video image encoding device, video image decoding method, video image decoding device, and video image encoding and decoding device |
| US9066110B2 (en) * | 2011-03-08 | 2015-06-23 | Texas Instruments Incorporated | Parsing friendly and error resilient merge flag coding in video coding |
| CN105245875B (zh) * | 2011-06-30 | 2018-01-05 | Jvc建伍株式会社 | 图像解码装置和图像解码方法 |
| PL3422714T3 (pl) * | 2011-06-30 | 2021-05-31 | JVC Kenwood Corporation | Urządzenie do kodowania obrazu, sposób kodowania obrazu, program do kodowania obrazu, urządzenie do dekodowania obrazu, sposób dekodowania obrazu i program do dekodowania obrazu |
| US9699456B2 (en) * | 2011-07-20 | 2017-07-04 | Qualcomm Incorporated | Buffering prediction data in video coding |
| KR20130050407A (ko) * | 2011-11-07 | 2013-05-16 | 오수미 | 인터 모드에서의 움직임 정보 생성 방법 |
| KR101934277B1 (ko) * | 2011-11-28 | 2019-01-04 | 에스케이텔레콤 주식회사 | 개선된 머지를 이용한 영상 부호화/복호화 방법 및 장치 |
| US20130177083A1 (en) * | 2012-01-05 | 2013-07-11 | Qualcomm Incorporated | Motion vector candidate index signaling in video coding |
| CN105791822A (zh) * | 2012-01-18 | 2016-07-20 | Jvc建伍株式会社 | 动图像解码装置以及动图像解码方法 |
| US9729873B2 (en) * | 2012-01-24 | 2017-08-08 | Qualcomm Incorporated | Video coding using parallel motion estimation |
| US9549180B2 (en) * | 2012-04-20 | 2017-01-17 | Qualcomm Incorporated | Disparity vector generation for inter-view prediction for video coding |
| US9325990B2 (en) * | 2012-07-09 | 2016-04-26 | Qualcomm Incorporated | Temporal motion vector prediction in video coding extensions |
| CN102883163B (zh) * | 2012-10-08 | 2014-05-28 | 华为技术有限公司 | 用于运动矢量预测的运动矢量列表建立的方法、装置 |
| US9762905B2 (en) * | 2013-03-22 | 2017-09-12 | Qualcomm Incorporated | Disparity vector refinement in video coding |
| US9554150B2 (en) * | 2013-09-20 | 2017-01-24 | Qualcomm Incorporated | Combined bi-predictive merging candidates for 3D video coding |
| US10560718B2 (en) * | 2016-05-13 | 2020-02-11 | Qualcomm Incorporated | Merge candidates for motion vector prediction for video coding |
| EP3264769A1 (en) * | 2016-06-30 | 2018-01-03 | Thomson Licensing | Method and apparatus for video coding with automatic motion information refinement |
| US11638027B2 (en) * | 2016-08-08 | 2023-04-25 | Hfi Innovation, Inc. | Pattern-based motion vector derivation for video coding |
| US10701366B2 (en) * | 2017-02-21 | 2020-06-30 | Qualcomm Incorporated | Deriving motion vector information at a video decoder |
| US10785494B2 (en) * | 2017-10-11 | 2020-09-22 | Qualcomm Incorporated | Low-complexity design for FRUC |
| US10432962B1 (en) * | 2018-03-13 | 2019-10-01 | Pixelworks, Inc. | Accuracy and local smoothness of motion vector fields using motion-model fitting |
| US10779002B2 (en) * | 2018-04-17 | 2020-09-15 | Qualcomm Incorporated | Limitation of the MVP derivation based on decoder-side motion vector derivation |
-
2018
- 2018-11-28 US US16/203,145 patent/US10469869B1/en active Active
-
2019
- 2019-05-16 WO PCT/US2019/032672 patent/WO2019231706A1/en unknown
- 2019-05-16 KR KR1020207026329A patent/KR102458138B1/ko active IP Right Grant
- 2019-05-16 EP EP19812054.5A patent/EP3804330A4/en active Pending
- 2019-05-16 CN CN201980017093.XA patent/CN112106371B/zh active Active
- 2019-05-16 JP JP2020546101A patent/JP7096896B2/ja active Active
- 2019-09-23 US US16/579,188 patent/US11012707B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140146890A1 (en) | 2010-12-21 | 2014-05-29 | Yi-Jen Chiu | System and method for enhanced dmvd processing |
| JP2012191513A (ja) | 2011-03-11 | 2012-10-04 | Sony Corp | 画像処理装置および方法 |
| JP2013016930A (ja) | 2011-06-30 | 2013-01-24 | Jvc Kenwood Corp | 画像符号化装置、画像符号化方法及び画像符号化プログラム |
| JP2013034186A (ja) | 2011-06-30 | 2013-02-14 | Jvc Kenwood Corp | 画像符号化装置、画像符号化方法および画像符号化プログラム |
| US20130202037A1 (en) | 2012-02-08 | 2013-08-08 | Xianglin Wang | Restriction of prediction units in b slices to uni-directional inter prediction |
| US20130243093A1 (en) | 2012-03-16 | 2013-09-19 | Qualcomm Incorporated | Motion vector coding and bi-prediction in hevc and its extensions |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20200116524A (ko) | 2020-10-12 |
| CN112106371A (zh) | 2020-12-18 |
| US20200021843A1 (en) | 2020-01-16 |
| CN112106371B (zh) | 2022-09-09 |
| KR102458138B1 (ko) | 2022-10-25 |
| WO2019231706A1 (en) | 2019-12-05 |
| US10469869B1 (en) | 2019-11-05 |
| JP2021517392A (ja) | 2021-07-15 |
| EP3804330A1 (en) | 2021-04-14 |
| EP3804330A4 (en) | 2022-03-16 |
| US11012707B2 (en) | 2021-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7096896B2 (ja) | ビデオ符号化のための方法及び装置 | |
| JP7480382B2 (ja) | ビデオ・コーディングのための方法、装置、及びコンピュータ・プログラム | |
| JP2021517392A5 (ja) | ||
| JP7027617B2 (ja) | ビデオエンコーディング及びデコーディングのための方法、装置、コンピュータプログラム、及び非一時的なコンピュータ可読媒体 | |
| JP2021521730A (ja) | 動画を復号する方法、装置、及びコンピュータプログラム | |
| JP7457170B2 (ja) | サブブロックに基づく時間的動きベクトル予測のための方法並びにその機器及びコンピュータプログラム | |
| JP7238150B2 (ja) | イントラピクチャブロック補償のための予測候補リストサイズシグナリングのための方法および装置 | |
| JP2022532032A (ja) | ビデオコーディングのための方法及び装置 | |
| JP2021519039A (ja) | 動画の符号化並びに復号の方法、装置及びコンピュータプログラム | |
| JP7270644B2 (ja) | ビデオ復号化のための方法、装置及びコンピュータプログラム | |
| KR20200125733A (ko) | 비디오 코딩을 위한 방법 및 장치 | |
| JP2023040204A (ja) | ビデオをデコードするための方法、装置及びプログラム | |
| JP7080434B2 (ja) | サブブロックの動きベクトル予測の方法、並びにその装置及びコンピュータプログラム | |
| JP2022516062A (ja) | ビデオ復号のための方法、ビデオデコーダ、およびコンピュータプログラム、ならびにビデオ符号化のための方法 | |
| JP7570753B2 (ja) | ビデオコーディングのための方法、コンピュータプログラム及び装置 | |
| JP2021517410A5 (ja) | ||
| JP2022521168A (ja) | ビデオコーディング方法、装置及びコンピュータプログラム | |
| JP2022512088A (ja) | ビデオコーディングのための方法、装置、およびプログラム | |
| JP7625667B2 (ja) | ビデオ復号方法、ビデオ復号装置、コンピュータプログラム、およびビデオ符号化方法 | |
| JP2021517391A (ja) | ビデオ符号化のための方法、及び装置 | |
| JP2021516933A (ja) | ビデオ符号化の方法および装置 | |
| KR102747635B1 (ko) | 비디오 코딩을 위한 방법 및 장치 | |
| JP2024107165A (ja) | Mmvdシグナリングの改善 | |
| JP2023527657A (ja) | Cuレベル重みをシグナリングしない双予測 | |
| KR102761715B1 (ko) | 비디오 코딩을 위한 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201014 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211217 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220512 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220512 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220523 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220624 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7096896 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |