以下、本発明の一実施例について、図面を参照しつつ詳細に説明する。なお、図は適宜簡略化されており、また、図面における寸法などは、実際の寸法や比率などとは必ずしも一致するものではない。
図1は、本発明の磁気計測装置10におけるセンサ部12の構成の概要を説明する図である。このうち、図1(a)はセンサ部12の構成の概要を説明する図であり、図1(b)は外観を説明する図(写真)である。図1(a)に示すように、本発明の磁気計測装置10はセンサ部12と後述する回路部14とを含んで構成される。本実施例におけるセンサ部12には、2つのセンサヘッド12a、12bを有するように構成されており、後述するようにそれら2つのセンサヘッド12a、12bを差動させて用いることなどができるようになっている。
センサ部12は、図1に示すように、1本のアモルファスワイヤ22と、2つのセンサヘッド12a、12bに対応して検出コイル26、28が設けられている。アモルファスワイヤ22は本発明の磁気異方性を有する磁性体に相当する。長手状のアモルファスワイヤ22の両端には電極が設けられていて、一方の電極は接地される一方、他方の電極には電線24が接続され、後述する回路部14から駆動電圧PEXが供給される。この駆動電圧PEXもしくは後述するDP1が、本発明の間欠的直流電流を印可するためのパルス信号に相当する。また、検出コイル26、28はそれぞれ一端が設置され、他端に接続された電線30、32がそれぞれ後述する回路部14に接続されることにより、それら検出コイル26、28の両端電圧であるETC1、ETC2をそれぞれ検出しうるようになっている。また、アモルファスワイヤ22は、検出コイル26、28に沿った部分、すなわちセンサヘッド12a、12bに対応する部分22a、22bと、それ以外の部分であるバランス部22cに分けられる。このバランス部12cは前記駆動電圧PEXが印可される必要がないため、電気的な損失を低減するために、バランス部の両端を電気抵抗の小さいケーブルによって短絡するバイパスケーブル34が設けられている。
図1(b)は、本実施例のセンサ部12の外観を説明する写真である。同図に示すように、本実施例のセンサ部12は、一枚の基板36上に実装されている。すなわち、基板36にアモルファスワイヤ22、検出コイル26、28が設けられるとともに、アモルファスワイヤ22の両端と電気的に接続されたケーブルを取り出すためのコネクタ38が、また、検出コイル26、28の両端のそれぞれと電気的に接続されたケーブルを取り出すためのコネクタ40、42がそれぞれ設けられている。
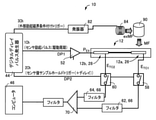
図2は、本実施例の磁気計測装置10の全体の構成を説明する図であって、特に回路部14の構成を説明する図である。図2に示すように回路部14は制御回路42、デジタルディレイパルス発生器44、コンピュータ46、アナログフィルタ48、データロガー50などを備えて構成される。
このうち、制御回路42は、前記センサ部12を制御、すなわち、駆動したり出力を取り出したりするためのものである。この制御回路は、所望の作動をおこなうよう設計された電子回路として構成されてもよいし、設計者が所望の論理機能をプログラムすることができるFPGA(Field Programmable Gate Array)などによって構成されてもよい。この制御回路42は、本発明の通電部や検出部に対応する。
また、デジタルディレイパルス発生器44は、操作者によって設定された形状のパルス波形を出力可能な装置である。すなわち、デジタルディレイパルス発生器44は、パルスの間隔(周期)、幅、タイミング、大きさなどを所望の値として出力することができる。本実施例においては、デジタルディレイパルス発生器44は少なくとも図2に示すDP1およびDP2の2系統の出力が可能とされている。デジタルディレイパルス発生器44も本発明の通電部に対応する。
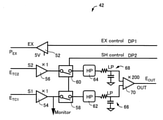
図3は、この制御回路42の構成の一例を説明する回路図である。図3に示すように、制御回路42は、入力アンプ52、出力アンプ54、56、サンプルホールド回路58、60、ハイパスフィルタ62、64、ローパスフィルタ66、68、差動アンプ70を含んで構成されている。
入力アンプ52は、前記デジタルディレイパルス発生器44から入力されるパルス信号DP1を所定の増幅率にて増幅して出力ポートEXから出力する。出力ポートEXからの出力PEXは、電線24を介してセンサ部12のアモルファスワイヤ22に印可される。すなわち、デジタルディレイパルス発生器44の出力するパルス信号DP1は、アモルファスワイヤ22に印可する電圧パターンを決定するパルス信号である。
出力アンプ54、56は、検出コイル26、28のそれぞれについて設けられており、検出コイル26、28の出力電圧であるETC1、ETC2[V]を入力ポートS1、S2からそれぞれ取り込み、所定の増幅率により増幅する。この増幅率は後述する高速ADコンバータの分解能などの仕様に応じて決定される。
サンプルホールド回路58、60は、出力アンプ54、56からの出力であるアナログ波形に対し、前記デジタルディレイパルス発生器44から供給されるパルス信号DP2に応じてホールド処理を行う。具体的には、パルス信号DP2が低電圧となった場合に、それをトリガとしてアナログ波形における値を再び高電圧となるまで保持する。
図4は、デジタルディレイパルス発生器44から発生させられるパルス信号DP1およびDP2と出力アンプ54、56に入力される入力ポートS1、S2のアナログ信号の例を示す図であり、図4(a)は理論値、図4(b)は実際の実験値をそれぞれ表している。図4(a)に示すように、アモルファスワイヤ22に印可される電圧を決定するパルス信号DP1は、本実施例においてはたとえば1[μsec]程度の一定周期p(すなわち1[MHz]程度の周波数)、一定幅wのパルスである。また、サンプルホールド回路を制御するパルス信号DP2は、前記パルス信号DP1の立ち上がりから時間dだけ遅れて一瞬だけ落ち込むようになっている。そしてパルス信号DP2が落ち込んだ後に立ち上がるのをトリガとしてサンプルホールド処理が行われるものとされている。この時間dはたとえば、検出コイル26、28の出力電圧ETC1、ETC2がピークとなった際にサンプリングが可能となるように、事前にシミュレーションあるいは実験的に決定される。
また、図4(b)に示すように、本実施例においては、パルス信号DP1、DP2とも、その振幅(パルスの大きさ)は5Vとされている。
サンプルホールド回路58、60から出力された信号は、ハイパスフィルタ62、64、および、ローパスフィルタ66、68を通過することにより、所定の周波数成分が除去される。なお、図3に示すように、ハイパスフィルタ62およびローパスフィルタ66はサンプルホールド回路58から出力された信号、すなわち、検出コイル26の出力ETC1に対応して設けられたものであり、ハイパスフィルタ64およびローパスフィルタ68はサンプルホールド回路60から出力された信号、すなわち、検出コイル28の出力ETC2に対応して設けられたものである。
差動アンプ70は、ハイパスフィルタ62、64、および、ローパスフィルタ66、68を通過したサンプルホールド回路58、60の出力値の差分を出力する。これにより、2つの検出コイル26、28の出力電圧ETC1、ETC2の差分を得ることができる。
なお、この図3に示す制御回路42の例は、センサ部12における2つのセンサヘッド12a、12bの出力を差動させる場合の制御回路の一例を説明するものである。したがって、2つのセンサヘッド12a、12bを差動させない場合、たとえば、それぞれのセンサヘッド12a、12bの出力を単独で用いるような場合には、制御回路42における差動アンプ70を要しない一方、出力端子が各センサヘッド12a、12b毎にそれぞれ必要となる。
また、図3に示す制御回路42においては、入出力される信号はアナログ信号とされているが、本実施例のように図2に示すように入力信号DP1、DP2がデジタルディレイパルス発生器44によって発生させられるデジタル信号である場合には、制御回路42において高速DAコンバータを備えてアナログ信号に変換することができる。また、出力信号EOUTについても同様であり、最終的にコンピュータ46において演算処理されるのに先立って、適切な段階で高速ADコンバータによってデジタル信号化されればよい。本実施例においては、これら高速DA/ADコンバータの図示は省略している。
図2に戻って、コンピュータ46は、たとえばCPU、メモリ、ROM、RAMなどを備えたいわゆるマイコンであり、あらかじめ記憶されたプログラムの内容にしたがって、前記デジタルディレイパルス発生器44の差動を制御したり、あるいは、後述するデータロガー50から得られるデータを所定の演算処理したりする。このコンピュータ46が本発明の演算部に対応する。
アナログフィルタ48は、たとえばバンドパスフィルタを含んで構成され、制御回路42から出力された信号から所望の周波数成分のみを取り出す。
データロガー50は、アナログフィルタ48から出力されたデータを所定のサンプリングレートに応じて記憶する。また、記憶されたデータを前記コンピュータ46に出力する。データロガー50は本発明の記憶部に対応する。
本実施例において、コンピュータ46は、データロガー50から得られたデータについて、ノイズの低減を目的とした演算を行う。この演算を図5を用いて説明する。図5(a)に示すように、アモルファスワイヤ22にパルス状の電圧PEXが印可されると、そのアモルファスワイヤ22のセンサヘッドに対応する部分22a、22bに近接させられた検出コイル26、28には電圧の変動が生ずる。前記パルス信号DP1において1回のパルスの発生に伴うセンサヘッド12a、12bのそれぞれの出力信号ETC1、ETC2の変化を1つの単位とする。図5(b)には、複数回のパルスが前記パルス信号DP1として供給された場合の検出コイルの該複数回の変化を伴う出力電圧Ecoilの例が記載されている。この検出コイルの出力電圧Ecoilは、前記検出コイル26、28の出力信号ETC1、ETC2に対応するものである。
コンピュータ46は、かかる出力電圧Ecoilについて、N回のパルスによって生じた出力電圧を積算する。この積算は、たとえばパルス信号DP1の立ち上がり時を基準として、所定のサンプリングレートごとに出力電圧Ecoilを積算するものである。積算区間は、検出コイル26、28の出力波形に応じて、たとえば300乃至1000[μsec]の範囲から適宜定められる。この出力電圧Ecoilの積算値ΣEcoilが得られる。かかる積算値においては、ノイズの積算は平均化されて、信号の積算に対して相対的に小さくなることから、信号に対するノイズの影響を低減しうるものであることから、より精度のよい磁気検出を可能とすることができる。
本実施例の磁気計測装置10の構成は上述の通りであり、アモルファスワイヤ22への入力電圧PEXとしては、高電位と低電位をペアとして、少なくとも1回、あるいは反復的に与えるものである。このことは、以下のことを意図している。言い換えれば、アモルファスワイヤ22には間欠的な直流電流が流れることとなる。センサヘッド部12の(磁気異方性を有する)素材であるアモルファスワイヤ22の内部の磁化素子は、環境磁界によって長手方向にボルツマンの法則に従って分布している。この内部磁化を高電位に伴う電流で一定方向に配向させる。この一定方向とは、本実施例のようにアモルファスワイヤ22が線状、言い換えれば円柱形状である場合には、その周方向のベクトル成分を有するものである。さらに低電位、あるいはそれに伴う小電流や無電流へ戻すことで再び環境磁界の支配となる。この2つの過程では同じ割合の内部磁化の移動が反対方向に起こることとなる。則ち、環境磁界に依存した軸方向の内部磁化を高電位印可時に排出し、低電位側印可時には吸収する。この内部磁化排出と吸収反応の時定数(反応・緩和速度)が異なるため、間欠的に印可する直流電流の幅w(duration)と間隔(interval)を好適に選ぶことで最大感度が得られる。このように、アモルファスワイヤ22に間欠的な直流電流を印可することによって発生させる磁界は、一般的にコイルに交流電流を印可して得られるような磁界とはその原理も実際の現象、すなわち、実際に発生する磁界の時間変化なども異なる。本実施例の磁気計測装置10は上述の原理に基づくものである。また、後述する構成により、回路ノイズを低減させる効果も有する。
なお、本明細書においては、パルス信号DP1が入力アンプ52により増幅されてアモルファスワイヤ22への入力電圧PEXとして印可される。そのため、パルス信号DP1における電圧の高低とアモルファスワイヤ22への入力電圧PEXの高低とは対応した概念である。さらに、アモルファスワイヤ22への入力電圧PEXの高低は、アモルファスワイヤ22へ通電される電流の大小とも一致した概念である。
続いて、本発明の磁気計測装置の動作原理についての検討を行うために、発明者が行った実験について説明する。図6はかかる実験を説明する図であって、図6(a)はその実験における装置の構成を示す図である。図6(a)に示すように、センサ部12における1つのセンサヘッド12aに対して、その長手方向、すなわち、アモルファスワイヤ22の延びる方向(図6(a)における紙面内の上下方向)に対して直交する方向となるように所定の間隔を介して導線74が配設される。そして、ある環境磁界Beの存在下において、導線74には何も通電しない状態で、センサヘッド12aの検出コイル26(図1など参照)のコイル起電力ETC1をオシロスコープで観察した。このとき、アモルファスワイヤ12に通電されるパルス状の電圧PEXにおけるパルスの幅w(図4(a)参照)の大きさを複数の異なる値に設定して、検出コイル26(図1など参照)のコイル起電力ETC1をそれぞれ測定した。このようにして得られた、パルスの幅wの値に対して、発生した検出コイル26のコイル起電力(誘導起電力)ETC1の振幅の関係を図6(b)に示す。図6(b)からわかるように、パルスの幅wの値が大きくなるにつれて、検出コイル26の起電力ETC1の振幅の大きさが増加する一方、パルスの幅wの値が200~300[nsec]程度において検出コイル26の起電力ETC1の振幅の大きさは最大に達した。
続いて、前記導線74に正弦波状の交流電流ITを通電して同様の実験を行った。このとき、サンプルホールド回路58(図3参照)によりサンプルホールド処理されて連続的に出力されるセンサ出力EOUTの振幅の大きさと、アモルファスワイヤ12に通電されるパルス状の電圧PEXにおけるパルスの幅wの大きさとの関係は、前述の導線74に電流を流さない場合の検出コイル26の起電力ETC1の振幅の大きさとパルスの幅wの大きさとの関係と一致した関係となった。すなわち、パルスの幅wの値が大きくなるにつれて、センサ出力EOUTの振幅の大きさが増加する一方、パルスの幅wの値が200~300[nsec]程度においてセンサ出力EOUTの振幅の大きさは最大に達した。
これらの結果を考察すると、検出コイル26の起電力ETC1の出力の回路には容量成分もあり、出力波系は遅れ平滑化されると考えられるが、パルス幅wが大きくなるのにつれて検出コイル26の起電力ETC1の振幅の大きさも増大していることから、本発明の磁気計測装置の感度上昇には、励起パルスの直流成分が関与していると考えることができる。
ところで、本発明と同様にアモルファスワイヤのようなMI素子に高周波電流を印可し、その際の表皮効果によりMI素子のインピーダンスが変化することを利用して周辺の磁気変動を検出することにより磁気検出を行ういわゆるMI(Magneto-Impedance)センサが提案されている。
かかるMIセンサにおいては、前述のようにMI素子の表皮効果を利用するものであるので、MI素子に印可する交流電流の高周波交流成分の影響を受ける。すなわち、前記MI素子のインピーダンスの変化は、MI素子に通電する交流電流の周波数に依存する。従ってワイヤへ励起信号は、サインウェーブ類似に加工された電流を周期的に印可しMI効果を得ている(非特許文献5)。一方、本発明の磁気計測装置においては、アモルファスワイヤ22に通電する直流電流のもととなるパルス信号DP1は、たとえば方形パルスのようなパルス波であるものの、前記MIセンサとは異なり、該パルス波の高周波成分を利用していない。すなわち、前述の図6に示したように、低電圧状態と高電圧状態とが切り替わるパルス信号DP1において、低電圧状態から切り替わった高電圧状態の長さ、すなわち前記パルスの幅wに起因して検出コイル26の起電力ETC1の大きさやセンサ出力EOUTの大きさが変動している。また、図5などに示すように、パルス信号DP1において、高電圧状態から低電圧状態に切り替わったことに伴っても、低電圧状態から高電圧状態に切り替わった際とは逆向きの起電力が検出コイル26の起電力ETC1に生じているが、この逆向きの起電力のピークの大きさも、低電圧状態に切り替わる前の高電圧状態の長さ、すなわち前記パルスの幅wの長さに伴って変化している。これらのことから、前記パルス信号DP1におけるパルスの幅w、言い換えれば、アモルファスワイヤ22に印可する電圧の直流成分により、アモルファスワイヤ22の内部磁化の移動の大きさが変化し、これが磁気計測装置10における検出感度を決定することと考えられるのである。これは本発明の発明者によって得られた知見に基づくものである。すなわち、パルスON/OFFによる内部磁化の排出と吸収過程と考えられる。
本発明においては、前記デジタルディレイパルス発生器44は、高精度、具体的にはたとえばナノ秒(nsec)単位で前記パルスの幅wを制御可能なものとされることが好ましい。また、前記パルスの高さe、すなわち、高電位状態と低電位状態との電位差についても精度よく制御可能なものであることが好ましい。ここで制御可能とはたとえば、かかる設定値とされた安定的なパルス信号が出力可能であることを意図している。このようにすれば、高感度、かつ、所望の感度の磁気計測装置を実現しうる。
さらに、本実施例の磁気計測装置を検証するために、本発明の発明者らによってなされた実験について説明する。図7は、本実験を説明する図であって、図7(a)は、装置の構成を表す図、図7(b)は実験結果としての検出コイル26、28の出力電圧ETC1、ETC2の時間変化を示す図、図7(c)は、図7(b)に示す実験結果を環境磁界の強さMHHと検出コイル26、28の出力電圧ETC1、ETC2の振幅との関係を説明する図である。
図7(a)に示すように、本実験においては、ヘルムホルツ回路78が用いられる。このヘルムホルツ回路78は周知のものであり、円形の2つのコイルを平行かつ同軸に配置し、各コイルの半径と2つのコイルの間隔とを等しくしたものであって、コイルの中心付近に一様な磁場(磁界)MHHを発生することのできるものである。図7(a)に示すように、ヘルムホルツコイル78のコイル中心付近にセンサヘッド12a、12bが位置するようにセンサ部12を配置する。そして、ヘルムホルツコイル78に複数の異なる強度の磁界MHHを発生させて、センサ部12を用いた本実施例の磁気計測装置10により磁界MHHの強度の計測を行った。なお、本実験においては図6(a)で説明した導線74は用いられていない。
上述の実施例と同様に、デジタルディレイパルス発生器44により発生させたパルス信号DP1を制御回路42の入力アンプ52により所定の増幅率で増幅させた電圧PEXをアモルファスワイヤ22に印可した。図7(b)は、このときの入力電圧PEXと検出コイル26、28の出力電圧ETC1、ETC2の時間変化を共通する横向きの時間軸を用いて示すものであって、ヘルムホルツコイル78に-100[μT]から100[μT]までの5つの異なる強度の磁界MHHを発生させた場合を示している。なお、本実験においては検出コイル26、28の出力は理論上同じものとなるので、図7(b)、図7(c)においては、一方の検出コイルのものを示しており、以下の説明においては、出力電圧ETCと記す。図7(b)における(i)乃至(v)は、図7(c)における(i)乃至(v)で示された三角形の印が付されたプロットの磁界MHHの強度に対応する出力電圧ETCである。
入力電圧PEXとして、幅(時間)wのステップ状のパルスを印可した際の出力電圧ETCの変化は、図7(b)に示すように、外部磁界MHHの値に応じて異なるものとなっている。具体的にはたとえば、磁界MHHが100[μT]付近の場合、入力電圧PEXが低電圧状態から高電圧状態に切り替わると、その後出力電圧ETCは極大となり、入力電圧PEXが高電圧状態から低電圧状態に切り替わると、その後出力電圧ETCは極小となる(図7(b)の(i))。また、磁界MHHが-100[μT]付近の場合、出力電圧ETCは100[μT]の場合と比べて正負がほぼ逆の出力となり、入力電圧PEXが低電圧状態から高電圧状態に切り替わると、その後出力電圧ETCは極小となり、入力電圧PEXが高電圧状態から低電圧状態に切り替わると、その後出力電圧ETCは極大となる(図7(b)の(v))。
ここで、図7(b)の(i)の例について検討すると、出力電圧ETCの変化における極大は、入力電圧PEXにおけるパルスの高電圧状態における直流成分により、アモルファスワイヤ22の内部磁化に軸方向に蓄えられていた環境磁界の影響が放出されることに起因するものであると考えられる。また、出力電圧ETCの変化における極小は、入力電圧PEXが低電圧状態、すなわち、アモルファスワイヤ22に流される電流が小さい状態へ戻すことによる、アモルファスワイヤ22の内部磁化が環境磁界の吸収過程に起因するものであるとと考えられる。つまり、出力電圧ETCの極大および極小の出現は、いずれも入力電圧PEXにおけるパルスの変化に伴うものであるが、それぞれ入力電圧PEXが低電圧状態から高電圧状態への変化、および、その逆である高電圧状態から低電圧状態への変化に伴うものである、そして、出力電圧ETCの極大および極小に変化する際の遷移の時定数は、それぞれ異なる。すなわち、入力電圧PEXが低電圧状態から高電圧状態となり出力電圧ETCが極大となる過程では、出力電圧ETCのの時定数は数10[nsec](several tens of nsec)であるため、200[nsec]程度で定常状態に達する。一方、入力電圧PEXが高電圧状態から低電圧状態となり出力電圧ETCが極小となる過程では、出力電圧ETCが極大となる過程より遅い。そのため、入力電圧PEXにおけるパルスの間隔、すなわち、高電圧状態から低電圧状態に変化した後、再び高電圧状態となるまでの間隔は、2~3[μsec]程度の間隔(interval/period)をもって与えないと、入力電圧PEXが再び高電圧状態となった際に出力電圧ETCの十分大きな反応を得られなくなる。なお、上記入力電圧PEXにおけるパルスの高電圧状態と低電圧状態は、それぞれ相対的に高低を有する2つの電圧状態であればよいが、好適には低電圧状態は0[V]とされる。そのようにした場合、前記低電圧状態の場合にアモルファスワイヤ22に流される電流も0[A]である。
前記出力電圧ETCにおける極大および極小の2つのピークは、上述のように環境磁界MHHを反映するものであり、それぞれ反対方向を向いているので、これら2つのピーク値を差分することで、極大値のみ、あるいは極小値のみというように1つのピークを用いるよりも大きな振幅を得ることができる。また、入力電圧PEXにおけるパルスの繰り返し周期p(図4(a)参照)を、ハムノイズ周波数などより十分に短くとることにより、低周波数の回路ノイズに対するフィルター効果が得ることができる。
励起直流電流の幅wは通常数百[nsec]レベルである。従って、検出コイルの出力電圧ETCにおけるその反対方向のピーク位置または領域は、通常数百[nsec]レベルの時間的なずれしか持たない。一方、回路ノイズ、例えば、電源の交流に依存する50-60[Hz]の電気的振動は、前述の反対方向ピークの数百[nsec]レベルの時間差に対してきわめて長いため、出力電圧ETCにおける2つのピークに対して同じ方向の電気ノイズを与える。2つのピークの振幅・面積は、外部磁界に依存して反対符号方向へ変化を与えるので、2つのピークの振幅・面積を差分することで外部磁界を計測することができる。このとき、ピーク演算のためのサンプリング時間・積算時間を同じにすれば、通常の電源などの低周波数の電気ノイズは、差分により打ち消されることとなる。この差分演算は、外部磁界計測の精度を向上させるとともに、ノイズフィルター効果も同時に発揮する。
図7(c)にみられるように、検出コイル26,28に発生する誘導起電力ETCの振幅は、外部磁界MHHに依存して変化している。アモルファスワイヤ22の内部磁化の移動により誘導起電力ETCが発生するので、このグラフ曲線の中央部分は、外部磁界MHH強度のボルツマン分布関数として近似できる。+-50μT程度で飽和するボルツマン曲線の中心部スロープから内部磁化が順方向と反方向の配向を取るエネルギー差ΔEが電子のスピンに起因するとき、通常エネルギー差は磁束密度Bに比例しており、磁束密度Bは、比透磁率μs、真空の透磁率μ0と磁界強度Hの積で表される。そこで、使用するアモルファス素材の比透磁率は真空の10,000倍程度であると推定される。この見かけ上の比透磁率は、磁場(磁界強度)を強化する構造が感磁部材内部にあるか、または電子スピンの集合が同時に変化する構造となっているか、またはその両者の組み合わせと考えられる。従って、非特許文献4に記載されるような単一スピンが独立に磁界の影響を受けることを仮定する場合のノイズレベルは、1cmの素材あたり10[fT]程度と推定されるが、多くのスピンが同時に配向を変化する構造となっている場合、例えば10000個が同時に配向を変える構造の場合には、ノイズレベルは100[pT]となる。従って、多くの感磁部材を同時に制御する前記IPAの方式は、感磁部材の量(数、体積)を増加することにより、ノイズレベルを低減することができる。
本実施例の磁気計測装置10によれば、磁気異方性を有するアモルファスワイヤ22を有するセンサヘッド部12と、センサヘッド部12に通電するためのステップ状のパルス信号を生成するデジタルディレイパルス発生器44および制御回路42と、センサヘッド部12の生ずる磁界を計測するための検出コイル26、28と、検出コイル26、28の起電力ETC1、ETC2を制御回路42によるセンサヘッド部12への通電に同期して検出する制御回路42と、を含み、制御回路42より、アモルファスワイヤ22もしくはアモルファスワイヤ22にに沿って設けられた導線124にパルス信号DP1、PEXが通電させられ、検出コイル26,28において、アモルファスワイヤ22が生ずる磁界の変動に起因して起電力ETC1、ETC2が生じさせられ、コンピュータ46により、パルス信号DP1が低電位側から高電位側に変化したこと、および、高電位側から低電位側に変化したことの少なくとも一方に基づく検出コイル26,28の起電力ETC1、ETC2の変化に基づいて磁気の検出が行われるので、精度よく磁気計測が行われるとともに、センサヘッド部12の小型化が実現される。
また、上述の実施例によれば、コンピュータ46は、ステップ状のパルス信号DP1,PEXが低電位側から高電位側に変化したこと、および、該変化に続いて高電位側から低電位側に変化したことに基づく検出コイル26、28の起電力ETC1、ETC2の変化に基づいて磁気の検出を行うので、パルス信号DP1,PEXが低電位側から高電位側に変化したこと、および、該変化に続いて高電位側から低電位側に変化したことを一対のものとして捉え、それらに基づく検出コイル26、28の起電力DP1,PEXの変化の振幅や面積を差分もしくは合計するなどした演算が可能となる。
また、上述の実施例によれば、一対の前記センサヘッド12a、12bと、一対のセンサヘッド12a、12b部に対応して一対の前記検出コイル26、28を有し、制御回路42の差動アンプ70は、それら一対の検出コイル26,28の出力ETC1、ETC2を差分もしくは増幅することにより磁気の検出を行うものであるので、一対のセンサヘッドを差動、あるいは、併用などした磁気計測が可能となる。
また、上述の実施例によれば、デジタルディレイパルス発生器44の発生するステップ状のパルス信号DP1は、その高電位側となる時間wを変更可能であるので、センサヘッド部12から生ずる磁界の大きさを所望の値に適宜変更させることができる。
また、上述の実施例によれば、磁気異方性を有する磁性体としては、アモルファスワイヤ22が用いられているので、そのアモルファスワイヤ22もしくはアモルファスワイヤ22に沿って配設された導線124に電流を流すことで、所望の効果を得ることができる。
また前述の実施例によれば、磁気異方性を有する磁性体として、固体、液体、気体もしくは蒸気のいずれかの態様のものを用いることができるので、形状に自由度を持たせてセンサヘッド部12を構成することができる。
続いて、本発明の別の実施例について説明する。以下の説明において、実施例相互に共通する部分については、同一の符号を付して説明を省略する。
図10は、本発明の磁気計測装置のさらに別の実施例の構成を説明する図であって、前述の実施例の図2、図3などに対応する図である。本実施例の磁気計測装置110においては、図2、図3で示された前述の実施例の磁気計測装置10が、さらに後述する発振器82およびコイル84を有している。
図10における発振器82はコイル84に接続されており、コイル84は、そのコイル84から発生する磁界を磁気計測装置10の測定対象90に与えることができるように配設されている。発振器82からコイル84電流が供給され、コイル84から所定の周波数で振動する磁界が発生できるものとされている。ここで本実施例においては、コイル84から発生する振動磁界が計測対象90を共鳴させることができる周波数となるようにされている。発振器82およびコイル84が本発明の振動磁界発生部に対応する。
なお、本実施例や前述の実施例において一対のセンサヘッド12a、12bの出力ETC1、ETC2が差動させられる場合においては、それら一対のセンサヘッド12a、12bのいずれか一方、図10の例においてはセンサヘッド12aに測定対象90が近接するようにセンサ部12が配設されることができる。このようにすれば、一方のセンサヘッド12aには環境磁界および測定対象90からの磁界が印可される一方、他方のセンサヘッド12bには環境磁界のみが印可されるため、両者の検出コイル26、28の出力電圧出力ETC1、ETC2が差動させられることにより環境磁界の影響を除去あるいは低減することができ、出力電圧の変動レンジが小さくなることから、同一のハードウェアを用いる場合においてより分解能を向上させることができる。
また、本実施例においては、デジタルディレイパルス発生器44は、前述の実施例と同様に、アモルファスワイヤ22に供給する駆動電圧PEXの元となるパルス信号DP1、サンプルホールド回路58、60を駆動させるための基準になるパルス信号DP2を発生するための2つのチャンネル1Ch、2Chに加え、発振器82の作動を制御するためのトリガー信号を発生するためのチャンネル3Chを有しており、全体として少なくとも3チャンネルの出力ポートを有している。発振器82はデジタルディレイパルス発生器44(図2参照)に接続されており、デジタルパルス発生器44からの制御信号に基づいて発振器82がコイル84に電流を供給するようにされている。そして、デジタルパルス発生器44は、アモルファスワイヤ22に励起電圧PEXを印可し、サンプルホールド回路58、60を制御するのに関連して、発振器82の作動を制御するためのトリガー信号を発生する。このようにすれば、センサ部12による磁気計測に併せて振動磁界を発生させることができる。
図11は、本実施例の磁気計測装置110におけるデジタルディレイパルス発生器44の各チャンネルごとの出力パターンと、発振器82からの出力、コイル84から測定対象90に印可される振動磁界の時間変化を説明するためのタイムチャートである。
前述のとおり、デジタルディレイパルス発生器44の1Chからは、アモルファスワイヤ22を励起させるための電圧PEXのもとになるパルス信号DP1が発生させられる。そして、3Chからは、発振器82を起動するためのトリガー信号が発生させられる。ここで図11に示すように、デジタルディレイパルス発生器44は、パルス信号DP1が低電圧状態から高電圧状態に立ち上がる時点から時間t13だけ前に、トリガー信号を発生させるものとされている。そして、かかるトリガー信号を受信した発振器82は、所定時間tOSCの間、コイル84に対して電流を供給する。コイル84からは、その電流が流れているtOSCの間、振動磁界が発生させられるとともに、その振動磁界は、電流が停止した後時間tdmpの間だけかかって減衰していく。一方、デジタルディレイパルス発生器44は、コイル84からの振動時間が減衰している途中において、サンプルホールド回路58、60がサンプルホールド処理を行うためのトリガー信号となるパルス信号DP2を2Chから出力する。
本実施例の磁気計測装置110によれば、測定対象90に対して振動磁界を与える発振器82およびコイル84をさらに備え、制御回路42およびデジタルディレイパルス発生器42は、発振器82およびコイル84によって発生させられる振動磁界の振動と同期して検出コイル26の起電力ETC1を検出するので、共鳴現象などを検出できる。すなわち、環境磁界またはヘルムホルツコイル78などで補助的に付加する低強度の静磁場環境において、計測対象物90内部の原子核・電子が有する共鳴周波数に相当する振動磁界が周囲の別の第二のコイル(たとえばコイル84)から印可されたとき、振動磁界印可後も、対象物内部の原子核・電子が発する振動磁界を(静磁界強度・スピンの種類やその)緩和時間に応じて検出する。このとき、本実施例の磁気計測装置による計測(励起直流電流印可)インターバルを対象物の共鳴周波数と同期させることで、効果的な測定を行うことができる。
その他、一々例示はしないが、本発明はその趣旨を逸脱しない範囲内において種々の変更が加えられて実施されるものである。
例えば、前述の実施例では2つのセンサ12a、12bを有するセンサヘッド12の例を示したが、これに限られず、1つのセンサ12aを用いることによって磁気測定を行うことも可能である。かかる場合において、実施例2のような構成をとらないのであれば、2つのセンサの出力を作動させることを前提として設けられた回路部14の構成部分、すなわち差動アンプ70などは設けられる必要はない。
また、前述の実施例においては、磁気異方性を有する磁性体として長手状のアモルファスワイヤ22が用いられたが、かかる態様に限られない。たとえば、磁気異方性を有する磁性体としては、iron garnet、ダイヤモンド、SiCの少なくとも1を有する物質が用いられてもよいし。また、形状も長手棒状に限られず、円筒状や平面状のものであってもよいし、平面状の磁性体をたとえば円筒状に巻き回したような所望の形状とされてもよい。さらに、磁気異方性を有する磁性体は、1つの固体に限られず、微小固体の集合体であってもよいし、固体に限られず、たとえば所望形状の容器に収納された磁気異方性を有する粒子を含有するイオン液体などのように、磁気異方性を有する液体や気体、蒸気とすることも可能である。さらに、アモルファス材料と上記イオン液体との複合物として設けることも可能である。
また、前述の実施例においては、回路部14において、サンプルホールド回路58、60は、それぞれ検出コイル26、28の起電力ETC1、ETC2の振幅のピーク(ピーク値)を検出するものとされたが、この際、検出コイル26、28の起電力ETC1、ETC2は、図示しないバンドパスフィルタによりACカップリングされた後、サンプルホールド回路58、60に入力されるようにしてもよい。
また、前述の実施例においては、アモルファスワイヤ22のうち、センサヘッド12a、12bに該当しない部分は電気的に短絡するためのバイパスケーブル(導線)34が設けられたが、必ずしも必須ではなく、パルス信号に基づいて作成された電流PEXアモルファスワイヤ22全体を流れるようにしてもよい。」
また、前述の実施例においては、アモルファスワイヤ22に印可される励起電圧の基になるパルス信号DP1は一定周期pのものとされたが、これに限定されず、間欠的なパルス信号とされてもよい。すなわち、パルス幅wは一定であるが、その発生間隔は一定でなくてもよい。これは、本発明によれば、前述の通り、パルス信号DP1の立ち上がりおよび落ち込みとその後の直流電流成分に起因して検出コイル26、28による起電力の変化の検出を行うものであって、パルス信号DP1が所定周期であることを要しないためである。
また、前述の実施例おいては、デジタルディレイパルス発生器44の発生するステップ状のパルス信号DP1は、その高電位側となる時間wを変更することによって、センサヘッド部12から生ずる磁界の大きさを所望の値に適宜変更させるものとしたが、このような態様に限られない。この時間wの変更に代えて、あるいは加えて、アモルファスワイヤ22に印可するパルス電位PEXの振幅を変化することや、または、センサヘッド部12から生ずる磁界の大きさを変更することもできる。このパルス電位PEXの振幅の変化は、入力アンプ52の増幅率を変更したり、あるいはパルス電位PEXの元となるパルス信号DP1の電圧を変更することによって実行される。これは、パルス電位PEXの振幅のある値によって生ずる磁界強度における遷移速度に依存して磁化の状態遷移が起こることによることで、定常状態に達するまでの時間wを十分な定常状態に達する前の値とすることで、検出コイルの誘導起電力を調整することができるためである。