JP6983067B2 - 医療用観察装置及び医療用観察方法 - Google Patents
医療用観察装置及び医療用観察方法 Download PDFInfo
- Publication number
- JP6983067B2 JP6983067B2 JP2017528310A JP2017528310A JP6983067B2 JP 6983067 B2 JP6983067 B2 JP 6983067B2 JP 2017528310 A JP2017528310 A JP 2017528310A JP 2017528310 A JP2017528310 A JP 2017528310A JP 6983067 B2 JP6983067 B2 JP 6983067B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- observation
- coefficient
- image pickup
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 83
- 230000003287 optical effect Effects 0.000 claims description 187
- 238000011156 evaluation Methods 0.000 claims description 167
- 238000003384 imaging method Methods 0.000 claims description 59
- 238000004364 calculation method Methods 0.000 claims description 57
- 230000003595 spectral effect Effects 0.000 claims description 43
- 238000011161 development Methods 0.000 claims description 31
- 238000001356 surgical procedure Methods 0.000 claims description 13
- 230000004075 alteration Effects 0.000 claims description 12
- 238000012545 processing Methods 0.000 description 72
- 230000008569 process Effects 0.000 description 40
- 238000001514 detection method Methods 0.000 description 26
- 238000006243 chemical reaction Methods 0.000 description 19
- 238000004891 communication Methods 0.000 description 19
- 230000006870 function Effects 0.000 description 19
- 230000010365 information processing Effects 0.000 description 18
- 238000011282 treatment Methods 0.000 description 17
- 239000011159 matrix material Substances 0.000 description 14
- 238000010586 diagram Methods 0.000 description 10
- 238000002674 endoscopic surgery Methods 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 6
- 238000010336 energy treatment Methods 0.000 description 5
- 238000003331 infrared imaging Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 230000003187 abdominal effect Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 238000000799 fluorescence microscopy Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 208000005646 Pneumoperitoneum Diseases 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 2
- 210000003815 abdominal wall Anatomy 0.000 description 2
- 210000004204 blood vessel Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000001151 other effect Effects 0.000 description 2
- 102000001554 Hemoglobins Human genes 0.000 description 1
- 108010054147 Hemoglobins Proteins 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 230000003434 inspiratory effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000002406 microsurgery Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 238000010186 staining Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00188—Optical arrangements with focusing or zooming features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/042—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by a proximal camera, e.g. a CCD camera
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/043—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances for fluorescence imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0638—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements providing two or more wavelengths
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/40—Optical focusing aids
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00045—Display arrangement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- General Physics & Mathematics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Gynecology & Obstetrics (AREA)
- Endoscopes (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
Description
1.システム構成
2.焦点位置の制御に関する検討
3.機能構成
4.処理
5.変形例
6.適用例
7.ハードウェア構成
8.まとめ
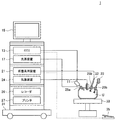
まず、図1を参照して、本実施形態に係る医療用観察装置を適用したシステムの構成の一例について説明する。図1は、本実施形態に係る医療用観察装置を適用したシステムの概略的な構成の一例について説明するための説明図である。
次に、本開示の一実施形態に係る医療用観察装置の特徴をよりわかりやすくするために、内視鏡11等に含まれる撮像部による焦点位置の制御に関する動作の概要を説明し、次いで、本実施形態に係る医療用観察装置の課題について整理する。
まず、図4を参照して、本実施形態に係る医療用観察装置の機能構成の一例について説明する。図4は、本実施形態に係る医療用観察装置の機能構成の一例について示したブロック図であり、特に、観察対象(被検体)の画像を撮像し、当該画像を表示する処理に着目した機能構成の一例を示している。

次に、図6を参照して、本実施形態に係る医療用観察装置の一連の処理の流れの一例について、特に、AF動作に係る処理に着目して説明する。図6は、本実施形態に係る医療用観察装置の一連の処理の流れの一例を示したフローチャートであり、特に、制御部130によるAF動作に係る処理の流れの一例について示している。
制御部130のAF評価信号算出部135は、術者(ユーザ)により選択された観察モードを示す観察モード選択信号を入力部から取得し、当該観察モード選択信号に応じたAF用評価信号係数を、所定の記憶領域から読み出す。また、他の一例として、AF評価信号算出部135は、撮像信号処理部131が撮像信号に対して適用した現像処理の内容に応じて、AF用評価信号係数を算出してもよい。以上のようにして、AF評価信号算出部135は、適用するAF用評価信号係数を決定する。
次いで、AF評価信号算出部135は、検波枠ゲート132を介して撮像信号処理部131から分光成分ごとの撮像信号を取得し、取得した当該撮像信号に対して決定したAF用評価信号係数を適用することで、分光成分間で重み付けを行い、AF評価信号を生成する。そして、AF評価信号算出部135は、算出したAF評価信号をAF評価値算出部136に出力する。
AF評価値算出部136は、AF評価信号算出部135からAF評価信号を取得し、取得したAF評価信号に基づきAF評価値を算出する。例えば、AFの方式がコントラスト方式の場合には、AF評価値算出部136は、取得したAF評価信号に基づきコントラストをAF評価値として算出する。AF評価値算出部136は、算出したAF評価値を、光学系制御部134に出力する。
光学系制御部134は、AF検波部133から出力されるAF評価値に基づき、フォーカスレンズ113の移動方向や移動量を決定する。例えば、光学系制御部134は、駆動系制御部117を介してフォーカスレンズ113の位置を制御しながら、AF検波部133から出力されるAF評価値を、フォーカスレンズ113の移動前後で比較する。光学系制御部134は、AF評価値の比較結果に基づき、当該AF評価値がより大きくなる方向にフォーカスレンズ113が光軸上を移動するように、当該フォーカスレンズ113の移動方向や移動量を決定する。
制御部130は、上記に説明した一連の処理を、AF評価値が最大になる位置にフォーカスレンズ113が移動する(即ち、合焦位置に移動する)まで継続する(S109、NO)。
そして、制御部130は、フォーカスレンズ113が合焦位置に移動すると(S109、YES)、当該フォーカスレンズ113の移動を停止し、AF動作を終了する。
次に、本実施形態に係る医療用観察装置の変形例について説明する。
前述した実施形態に係る医療用観察装置は、術者(ユーザ)により選択された観察モードに応じて、AF用評価信号係数を決定し、当該AF用評価信号係数に基づきAF用評価信号を生成していた。これに対して変形例に係る医療用観察装置は、撮像信号に対して適用した現像処理の内容(例えば、ホワイトバランスの調整や色再現処理のために適用した現像パラメータ)に応じて、AF用評価信号係数を動的に算出する。
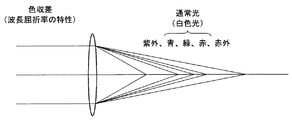
また、医療用観察装置100は、撮像光学系111(または、撮像部110自体)が着脱可能に構成されていてもよい。このような場合には、医療用観察装置100に対して、光学特性が異なる撮像光学系111が装着される場合が想定され、装着される撮像光学系111の光学特性に応じて合焦位置が異なる場合も想定され得る。特に、被写体からの観察対象光のうち複数の帯域(例えば、互いに近傍に位置する帯域)を観察対象とする状況下で、各帯域に対応する被写体像それぞれに合焦するように撮像光学系111の焦点位置を制御する場合には、好適な合焦位置が撮像光学系111の光学特性に応じて異なる場合がある。このような状況を鑑みて、医療用観察装置100は、装着された撮像光学系111の光学特性(特に、色収差)に応じて、AF用評価信号係数を算出してもよい。
次に、図7を参照して、本実施形態に係る医療用観察装置の他の適用例として、アームを備えた手術用ビデオ顕微鏡装置が用いられる場合の一例について説明する。図7は、本実施形態に係る医療用観察装置の一適用例について説明するための説明図である。
次に、図8を参照しながら、本実施形態に係る医療用観察装置として構成される情報処理装置900のハードウェア構成の一例について、詳細に説明する。図8は、本開示の一実施形態に係る医療用観察装置として構成される情報処理装置900のハードウェア構成の一構成例を示す機能ブロック図である。
以上、説明したように、本実施形態に係る医療用観察装置100は、被写体からの観察対象光のうち観察の対象となる帯域に応じたAF用評価信号係数と、撮像素子114からの撮像信号とに基づきAF評価値を算出し、算出した当該AF評価値に基づき合焦動作(AF動作)を行う。このような構成により、本実施形態に係る医療用観察装置100は、色収差の比較的大きい光学系を使用した場合においても、観察の対象となる帯域に応じて、被写体に対して合焦するように、撮像光学系111の焦点位置を制御することが可能となる。即ち、本実施形態に係る医療用観察装置100に依れば、術者(ユーザ)は、所謂特殊光観察においても、観察の対象となる帯域に応じた、より鮮明な被写体像を観察することが可能となる。
(1)
撮像素子による生体内の被写体からの観察対象光の受光結果に基づく、互いに異なる複数の分光成分それぞれに対応する撮像信号に対して、前記観察対象光の帯域のうち観察の対象とする帯域に応じた前記複数の分光成分間の重みを適用し、前記重みが適用された当該撮像信号に基づき、合焦の度合いを示す評価値を算出する算出部と、
前記被写体からの観察対象光を前記撮像素子に結像する光学系のうち少なくとも1つの光学部材の位置を、前記評価値に基づき制御することで当該光学系の焦点位置を制御する制御部と、
を備える、医療用観察装置。
(2)
前記算出部は、前記複数の分光成分に基づき前記観察の対象とする帯域の成分に基づく画像データを生成するための補正パラメータに応じた前記重みに基づき、前記評価値を算出する、前記(1)に記載の医療用観察装置。
(3)
前記算出部は、前記観察の対象とする帯域ごとにあらかじめ設定された前記重みに基づき、前記評価値を算出する、前記(1)に記載の医療用観察装置。
(4)
前記算出部は、前記観察対象光の帯域のうち少なくとも一部の帯域を観察対象とする複数のモードそれぞれについてあらかじめ設定された前記重みのうち、選択された前記モードに対応する前記重みを取得し、取得した当該重みに基づき、前記評価値を算出する、前記(3)に記載の医療用観察装置。
(5)
前記複数のモードには、狭帯域光観察、蛍光観察、及び赤外光観察のうち少なくともいずれかに対応するモードが含まれる、前記(4)に記載の医療用観察装置。
(6)
前記算出部は、前記被写体の撮像が行われる手術の術式に応じて設定される前記重みに基づき、前記評価値を算出する、前記(1)に記載の医療用観察装置。
(7)
前記算出部は、前記被写体の撮像が行われる診療科に応じて設定される前記重みに基づき、前記評価値を算出する、前記(1)に記載の医療用観察装置。
(8)
前記算出部は、前記光学系の光学特性に応じて設定される前記重みに基づき、前記評価値を算出する、前記(1)〜(7)のいずれか一項に記載の医療用観察装置。
(9)
前記複数の分光成分に対応する前記撮像信号は、RGB信号であり、
R信号、G信号、及びB信号の輝度成分をそれぞれR、G、及びBとし、前記重みに基づく、前記R信号、前記G信号、及び前記B信号それぞれに対応する係数をr、g、及びbとしたとき、前記評価値を算出するための評価信号Lは、以下に示す計算式に基づき算出される、前記(1)〜(8)のいずれか一項に記載の医療用観察装置。
前記制御部は、前記評価値を基に算出される被写体像のコントラストに基づき、前記光学系の焦点位置を制御する、前記(1)〜(9)のいずれか一項に記載の医療用観察装置。
(11)
前記撮像素子を含む撮像部を備える、前記(1)〜(10)のいずれか一項に記載の医療用観察装置。
(12)
前記撮像部は、患者の体腔内に挿入される内視鏡である、
前記(11)に記載の医療用観察装置。
(13)
前記撮像部は、前記被写体の光学像を取得する前記光学系を含む顕微鏡部であって、
前記顕微鏡部を支持する支持部、
をさらに備える、
前記(11)に記載の医療用観察装置。
(14)
プロセッサが、
撮像素子による生体内の被写体からの観察対象光の受光結果に基づく、互いに異なる複数の分光成分それぞれに対応する撮像信号に対して、前記観察対象光の帯域のうち観察の対象とする帯域に応じた前記複数の分光成分間の重みを適用し、前記重みが適用された当該撮像信号に基づき、合焦の度合いを示す評価値を算出することと、
前記被写体からの観察対象光を前記撮像素子に結像する光学系のうち少なくとも1つの光学部材の位置を、前記評価値に基づき制御することで当該光学系の焦点位置を制御することと、
を含む、医療用観察方法。
11 内視鏡
13 CCU
15 表示装置
17 光源装置
21 処置具用装置
22 エネルギ処置具
23 鉗子
24 気腹装置
25a、25b トロッカ
26 レコーダ
27 プリンタ
31 カート
33 患者ベッド
35 フットスイッチ
100 医療用観察装置
110 撮像部
111 撮像光学系
112 ズームレンズ
113 フォーカスレンズ
114 撮像素子
115 ズームレンズ駆動部
116 フォーカスレンズ駆動部
117 駆動系制御部
118 撮像素子駆動部
130 制御部
131 撮像信号処理部
132 検波枠ゲート
133 検波部
134 光学系制御部
135 評価信号算出部
136 評価値算出部
170 光源部
Claims (13)
- 撮像素子による生体内の被写体からの観察対象光の受光結果に基づく、互いに異なる複数の分光成分それぞれに対応する撮像信号に対して、前記観察対象光の帯域のうち観察の対象とする帯域に応じた前記複数の分光成分間で重み付けを行うための係数を適用し、前記係数が適用された当該撮像信号に基づき、合焦の度合いを示す評価値を算出する算出部と、
前記被写体からの観察対象光を前記撮像素子に結像する光学系のうち少なくとも1つの光学部材の位置を、前記評価値に基づき制御することで当該光学系の焦点位置を制御する制御部と、
ユーザから観察モードの選択を受け付けて当該選択された観察モードを示す観察モード選択信号を生成する入力部と、
を備え、
前記観察モードは、通常光を観察対象とする通常光観察モードと、前記通常光とは異なる帯域の成分を観察対象とする特殊光観察モードとを含み、
前記係数は、前記通常光観察モードで取得された撮像信号に対する第1係数と、前記特殊光観察モードで取得された撮像信号に対する第2係数とを含み、
前記第1係数及び前記第2係数のうちの少なくとも一方において、前記複数の分光成分のうちの少なくとも1つの係数は、他の分光成分の係数とは異なり、
前記算出部は、前記観察モード選択信号を前記入力部から取得し、取得された前記観察モード選択信号に基づいて所定の記憶領域に格納されている前記第1係数及び前記第2係数の中から前記観察モード選択信号に応じた前記係数を読み出して、前記評価値を算出する、
医療用観察装置。 - 前記算出部は、前記複数の分光成分に基づき前記観察の対象とする帯域の成分に基づく画像データを生成するための現像パラメータに応じた前記係数に基づき、前記評価値を算出する、請求項1に記載の医療用観察装置。
- 前記算出部は、前記観察の対象とする帯域ごとにあらかじめ設定された前記係数に基づき、前記評価値を算出する、請求項1に記載の医療用観察装置。
- 前記特殊光観察モードには、狭帯域光観察、蛍光観察、及び赤外光観察のうちの少なくとも1つに対応するモードが含まれる、請求項1に記載の医療用観察装置。
- 前記算出部は、前記被写体の撮像が行われる手術の術式に応じて設定される前記係数に基づき、前記評価値を算出する、請求項1に記載の医療用観察装置。
- 前記算出部は、前記被写体の撮像が行われる診療科に応じて設定される前記係数に基づき、前記評価値を算出する、請求項1に記載の医療用観察装置。
- 前記算出部は、前記光学系の光学特性に応じて設定される前記係数に基づき、前記評価値を算出し、
前記複数の分光成分それぞれの係数は、前記撮像素子に結像する光学系の色収差に基づいて設定される、
請求項1乃至請求項6の何れか1項に記載の医療用観察装置。 - 前記複数の分光成分に対応する前記撮像信号は、RGB信号であり、
R信号、G信号、及びB信号の輝度成分をそれぞれR、G、及びBとし、前記R信号、前記G信号、及び前記B信号それぞれに対応する前記係数をr、g、及びbとしたとき、前記評価値を算出するための評価信号Lは、以下に示す計算式に基づき算出される、請求項1乃至請求項7の何れか1項に記載の医療用観察装置。
- 前記制御部は、前記評価値を基に算出される被写体像のコントラストに基づき、前記光学系の焦点位置を制御する、請求項1乃至請求項8の何れか1項に記載の医療用観察装置。
- 前記撮像素子を含む撮像部を備える、請求項1乃至請求項9の何れか1項に記載の医療用観察装置。
- 前記撮像部は、患者の体腔内に挿入される内視鏡である、
請求項10に記載の医療用観察装置。 - 前記撮像部は、前記被写体の光学像を取得する前記光学系を含む顕微鏡部であって、
前記顕微鏡部を支持する支持部、
をさらに備える、
請求項10に記載の医療用観察装置。 - プロセッサが、
撮像素子による生体内の被写体からの観察対象光の受光結果に基づく、互いに異なる複数の分光成分それぞれに対応する撮像信号に対して、前記観察対象光の帯域のうち観察の対象とする帯域に応じた前記複数の分光成分間で重み付けを行うための係数を適用し、前記係数が適用された当該撮像信号に基づき、合焦の度合いを示す評価値を算出することと、
前記被写体からの観察対象光を前記撮像素子に結像する光学系のうち少なくとも1つの
光学部材の位置を、前記評価値に基づき制御することで当該光学系の焦点位置を制御することと、
ユーザから観察モードの選択を受け付けて当該選択された観察モードを示す観察モード選択信号を生成することと、
を含み、
前記観察モードは、通常光を観察対象とする通常光観察モードと、前記通常光とは異なる帯域の成分を観察対象とする特殊光観察モードとを含み、
前記係数は、前記通常光観察モードで取得された撮像信号に対する第1係数と、前記特殊光観察モードで取得された撮像信号に対する第2係数とを含み、
前記第1係数及び前記第2係数のうちの少なくとも一方において、前記複数の分光成分のうちの少なくとも1つの係数は、他の分光成分の係数とは異なり、
前記評価値は、生成された前記観察モード選択信号に基づいて所定の記憶領域に格納されている前記第1係数及び前記第2係数の中から前記観察モード選択信号に応じた前記係数が読み出しされて算出される、
医療用観察方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015141225 | 2015-07-15 | ||
| JP2015141225 | 2015-07-15 | ||
| PCT/JP2016/064126 WO2017010157A1 (ja) | 2015-07-15 | 2016-05-12 | 医療用観察装置及び医療用観察方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017010157A1 JPWO2017010157A1 (ja) | 2018-05-24 |
| JP6983067B2 true JP6983067B2 (ja) | 2021-12-17 |
Family
ID=57757199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017528310A Active JP6983067B2 (ja) | 2015-07-15 | 2016-05-12 | 医療用観察装置及び医療用観察方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10568492B2 (ja) |
| EP (1) | EP3300650B1 (ja) |
| JP (1) | JP6983067B2 (ja) |
| CN (1) | CN107847107B (ja) |
| WO (1) | WO2017010157A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6581952B2 (ja) * | 2016-09-30 | 2019-09-25 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| JP7039938B2 (ja) * | 2017-06-27 | 2022-03-23 | ソニーグループ株式会社 | 情報処理装置および方法、並びに、情報処理システム |
| EP3514600A1 (en) * | 2018-01-19 | 2019-07-24 | Leica Instruments (Singapore) Pte. Ltd. | Method for fluorescence intensity normalization |
| WO2020080209A1 (ja) * | 2018-10-18 | 2020-04-23 | ソニー株式会社 | 医療用観察システム、医療用観察装置及び医療用観察方法 |
| JP7286948B2 (ja) * | 2018-11-07 | 2023-06-06 | ソニーグループ株式会社 | 医療用観察システム、信号処理装置及び医療用観察方法 |
| JP7476800B2 (ja) | 2018-12-13 | 2024-05-01 | ソニーグループ株式会社 | 医療支援システム、医療支援装置及び医療支援方法 |
| JP7247702B2 (ja) | 2019-03-27 | 2023-03-29 | ソニーグループ株式会社 | 内視鏡システム、内視鏡制御方法、及び、撮像制御装置 |
| US11944273B2 (en) * | 2019-06-20 | 2024-04-02 | Cilag Gmbh International | Fluorescence videostroboscopy of vocal cords |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09253041A (ja) * | 1996-03-26 | 1997-09-30 | Olympus Optical Co Ltd | 内視鏡装置 |
| JP4772235B2 (ja) * | 2001-09-13 | 2011-09-14 | オリンパス株式会社 | 内視鏡装置 |
| JP3619801B2 (ja) * | 2001-11-22 | 2005-02-16 | オリンパス株式会社 | 内視鏡用撮像装置 |
| JP2004272039A (ja) | 2003-03-11 | 2004-09-30 | Pentax Corp | 自動焦点調節装置 |
| JP2004272037A (ja) * | 2003-03-11 | 2004-09-30 | Pentax Corp | 自動焦点調節装置及び自動焦点調節方法 |
| JP2005250401A (ja) * | 2004-03-08 | 2005-09-15 | Kodak Digital Product Center Japan Ltd | 焦点距離検出方法及び合焦装置 |
| CN102387736A (zh) * | 2009-04-09 | 2012-03-21 | 奥林巴斯医疗株式会社 | 内窥镜装置 |
| JP5597942B2 (ja) * | 2009-06-10 | 2014-10-01 | 株式会社ニコン | 電子カメラ |
| JP5346856B2 (ja) * | 2010-03-18 | 2013-11-20 | オリンパス株式会社 | 内視鏡システム、内視鏡システムの作動方法及び撮像装置 |
| JP2012110481A (ja) * | 2010-11-24 | 2012-06-14 | Olympus Corp | 内視鏡装置、フォーカス制御方法及びプログラム |
| JP5466182B2 (ja) * | 2011-01-11 | 2014-04-09 | 富士フイルム株式会社 | 内視鏡システムおよび内視鏡システムの作動方法 |
| JP5940306B2 (ja) * | 2012-01-13 | 2016-06-29 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP6120491B2 (ja) * | 2012-05-01 | 2017-04-26 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置のフォーカス制御方法 |
| JP5953373B2 (ja) * | 2012-05-31 | 2016-07-20 | オリンパス株式会社 | 内視鏡装置 |
| JP2016170182A (ja) * | 2013-07-22 | 2016-09-23 | オリンパスメディカルシステムズ株式会社 | 医療用観察装置 |
| US9451876B2 (en) | 2013-10-21 | 2016-09-27 | Olympus Corporation | Endoscope system and focus control method for endoscope system |
| CN109640781A (zh) * | 2016-09-06 | 2019-04-16 | 奥林巴斯株式会社 | 内窥镜系统 |
-
2016
- 2016-05-12 CN CN201680040221.9A patent/CN107847107B/zh active Active
- 2016-05-12 JP JP2017528310A patent/JP6983067B2/ja active Active
- 2016-05-12 WO PCT/JP2016/064126 patent/WO2017010157A1/ja active Application Filing
- 2016-05-12 EP EP16824137.0A patent/EP3300650B1/en active Active
- 2016-05-12 US US15/576,969 patent/US10568492B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3300650A4 (en) | 2019-02-06 |
| US10568492B2 (en) | 2020-02-25 |
| CN107847107B (zh) | 2021-09-24 |
| US20180146844A1 (en) | 2018-05-31 |
| EP3300650B1 (en) | 2023-08-23 |
| JPWO2017010157A1 (ja) | 2018-05-24 |
| WO2017010157A1 (ja) | 2017-01-19 |
| EP3300650A1 (en) | 2018-04-04 |
| CN107847107A (zh) | 2018-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6983067B2 (ja) | 医療用観察装置及び医療用観察方法 | |
| US11642004B2 (en) | Image processing device, image processing method and recording medium | |
| WO2018034075A1 (ja) | 撮像システム | |
| JP5968944B2 (ja) | 内視鏡システム、プロセッサ装置、光源装置、内視鏡システムの作動方法、プロセッサ装置の作動方法、光源装置の作動方法 | |
| JP7095693B2 (ja) | 医療用観察システム | |
| JP6401800B2 (ja) | 画像処理装置、画像処理装置の作動方法、画像処理装置の作動プログラムおよび内視鏡装置 | |
| US20210019921A1 (en) | Image processing device, image processing method, and program | |
| WO2017010156A1 (ja) | 医療用観察装置及び医療用観察方法 | |
| JPWO2019031000A1 (ja) | 信号処理装置、撮像装置、信号処理方法及びプログラム | |
| JP2024072843A (ja) | 医療用観察システム、制御装置、制御方法、および撮像装置 | |
| WO2018173605A1 (ja) | 手術用制御装置、制御方法、手術システム、およびプログラム | |
| US20230047294A1 (en) | Medical image generation apparatus, medical image generation method, and medical image generation program | |
| JP7456385B2 (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| WO2020009127A1 (ja) | 医療用観察システム、医療用観察装置、及び医療用観察装置の駆動方法 | |
| WO2023145480A1 (ja) | 医療撮像システム、制御方法、及びプログラム | |
| US20230347169A1 (en) | Phototherapy device, phototherapy method, and computer-readable recording medium | |
| WO2024158040A1 (ja) | 画像処理装置、医療用システム、画像処理装置の作動方法およびプログラム | |
| WO2021181484A1 (ja) | 医療用画像処理装置、医療用撮像装置、医療用観察システム、画像処理方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190208 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190214 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190215 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190426 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190426 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200714 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210104 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20210104 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20210113 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20210119 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20210226 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20210302 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20210413 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20210629 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20210706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210721 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20211012 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20211109 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20211109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6983067 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |