JP6966426B2 - 経皮分析物センサ、そのためのアプリケータ、及び関連した方法 - Google Patents
経皮分析物センサ、そのためのアプリケータ、及び関連した方法 Download PDFInfo
- Publication number
- JP6966426B2 JP6966426B2 JP2018513507A JP2018513507A JP6966426B2 JP 6966426 B2 JP6966426 B2 JP 6966426B2 JP 2018513507 A JP2018513507 A JP 2018513507A JP 2018513507 A JP2018513507 A JP 2018513507A JP 6966426 B2 JP6966426 B2 JP 6966426B2
- Authority
- JP
- Japan
- Prior art keywords
- seal
- needle
- sensor
- patent publication
- cannula
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14503—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue invasive, e.g. introduced into the body by a catheter or needle or using implanted sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3468—Trocars; Puncturing needles for implanting or removing devices, e.g. prostheses, implants, seeds, wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0004—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by the type of physiological signal transmitted
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/14532—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue for measuring glucose, e.g. by tissue impedance measurement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/683—Means for maintaining contact with the body
- A61B5/6832—Means for maintaining contact with the body using adhesives
- A61B5/6833—Adhesive patches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0023—Surgical instruments, devices or methods, e.g. tourniquets disposable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00407—Ratchet means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
Description
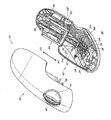
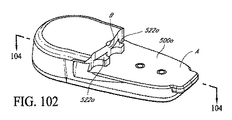
図1は、受容者に取り付けられ、多くの他の例示的なデバイス110〜113と通信している、連続分析物センサシステム100の概略図である。使い捨て筐体(図示せず)を介して受容者の皮膚に固定される、皮膚上センサアセンブリ600を備える経皮分析物センサシステムが示される。システムは、経皮分析物センサ200と、分析物情報を受信機に無線で送信するための電子機器ユニット(互換的に「センサ電子機器」または「送信機」と称される)500とを含む。使用中、センサ200の検知部分は、受容者の皮膚下にあり、センサ200の接触部分は、電子機器ユニット500に電気接続される。電子機器ユニット500は、受容者の皮膚に固定された接着パッチに取り付けられる筐体と係合される。
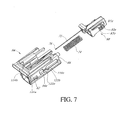
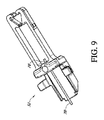
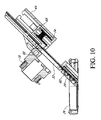
貯蔵エネルギーの補助源、すなわち、別個のブースタバネを開示した。力の主要源であるバネ54は、特に、針などの挿入コンポーネントに関して、挿入力のための、及びさらには格納力の一部分のためのエネルギー源を提供した。力の二次源であるバネ74は、特にカニューレなどの挿入コンポーネントに対して、格納力のためのエネルギー源を提供した。挿入コンポーネント、例えば、カニューレが抵抗源、例えば、エラストマーシールを通じて格納されていたため、追加の格納力が部分的に必要であった。同じ機能を達成するために単一の大きい、またはより大きいバネもまた用いられ得る一方で、その使用は、アプリケータのサイズを有害に増大させる。したがって、特に子供または小柄な大人による使用のための、コンパクトなアプリケータを確実にするために、図3〜16の実装は、より有利な代替物を提供する。

Claims (18)
- 皮膚上センサアセンブリを受容者の皮膚に適用するためのアプリケータであって、前記アプリケータは、
使い捨て筐体に動作可能に結合されたアプリケータ筐体であって、前記使い捨て筐体は、電子機器ユニットを受容するように構成され、前記電子機器ユニットは、センサからの信号に基づき分析物情報を生成するように構成された、アプリケータ筐体と、
挿入部材を備える挿入アセンブリであって、前記挿入部材は、前記センサを前記受容者の前記皮膚に挿入するように構成された、挿入アセンブリと、
前記挿入アセンブリに解除可能に結合された、エラストマーを含むシールと、
第1の量の貯蔵エネルギーを含む第1の駆動アセンブリであって、前記第1の駆動アセンブリは、前記挿入部材を遠位方向に挿入位置まで駆動するように構成された、第1の駆動アセンブリと、
第2の量の貯蔵エネルギーを含む第2の駆動アセンブリであって、前記第2の駆動アセンブリは、前記挿入部材を近位方向に駆動するように構成された、第2の駆動アセンブリと、を備え、
前記第2の量の貯蔵エネルギーは、前記シールを前記挿入アセンブリから分離するのに十分である、アプリケータ。 - 前記第1の駆動アセンブリは、前記挿入部材が前記挿入位置に到達した後に、前記挿入部材を前記近位方向に駆動するように構成された、請求項1に記載のアプリケータ。
- 前記第1の駆動アセンブリは、前記第1の駆動アセンブリが前記挿入部材を前記近位方向に駆動し始めた後に、前記第2の駆動アセンブリを起動するように構成された、請求項1または2に記載のアプリケータ。
- 前記第1の駆動アセンブリは、前記第1の駆動アセンブリがトリガ位置に到達したときに前記第2の駆動アセンブリを起動するように構成され、前記トリガ位置は、前記挿入位置の近位である、請求項1または2に記載のアプリケータ。
- 前記第2の駆動アセンブリは、前記シールを前記挿入アセンブリから分離するように構成された、請求項1または2に記載のアプリケータ。
- 前記第2の量の貯蔵エネルギーは、前記シールを前記挿入アセンブリから分離するのに十分である、請求項1または2に記載のアプリケータ。
- 前記第2の量の貯蔵エネルギーは、前記シールを前記挿入アセンブリから分離し、前記挿入部材を近位方向に格納位置まで駆動するのに十分である、請求項1または2に記載のアプリケータ。
- 前記近位方向及び前記遠位方向は、前記挿入部材の軸に沿って延在する、請求項1または2に記載のアプリケータ。
- 前記近位方向及び前記遠位方向の延在方向は、前記使い捨て筐体の平面に対してある角度を有する、請求項1または2に記載のアプリケータ。
- 前記シールは、前記使い捨て筐体に動作可能に結合される、請求項1または2に記載のアプリケータ。
- 前記シールは、前記挿入アセンブリと摩擦係合される、請求項1または2に記載のアプリケータ。
- 前記シールは、前記挿入アセンブリと摺動可能に結合される、請求項1または2に記載のアプリケータ。
- 前記シールは、エラストマーを含む、請求項1または2に記載のアプリケータ。
- 前記使い捨て筐体に動作可能に結合されたキャリアをさらに備え、前記シールは、前記キャリアに動作可能に結合される、請求項1または2に記載のアプリケータ。
- 前記キャリアは、前記使い捨て筐体に可動結合される、請求項14に記載のアプリケータ。
- 前記挿入部材は、針を含む、請求項1または2に記載のアプリケータ。
- 前記シールは、第1の部分と第2の部分とを含み、前記第1の部分は、第1のデュロメータを有し、前記第2の部分は、第2のデュロメータを有し、前記第2のデュロメータは、前記第1のデュロメータよりも高い、請求項1または2に記載のアプリケータ。
- 前記第1の部分は、シリコーンを含み、前記第2の部分は、TPEを含む、請求項17に記載のアプリケータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021172367A JP7463328B2 (ja) | 2015-10-21 | 2021-10-21 | 皮膚上センサアセンブリを適用するためのアプリケータ |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562244520P | 2015-10-21 | 2015-10-21 | |
| US62/244,520 | 2015-10-21 | ||
| PCT/US2016/057933 WO2017070360A1 (en) | 2015-10-21 | 2016-10-20 | Transcutaneous analyte sensors, applicators therefor, and associated methods |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021172367A Division JP7463328B2 (ja) | 2015-10-21 | 2021-10-21 | 皮膚上センサアセンブリを適用するためのアプリケータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019500064A JP2019500064A (ja) | 2019-01-10 |
| JP2019500064A5 JP2019500064A5 (ja) | 2019-11-28 |
| JP6966426B2 true JP6966426B2 (ja) | 2021-11-17 |
Family
ID=58557786
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018513507A Active JP6966426B2 (ja) | 2015-10-21 | 2016-10-20 | 経皮分析物センサ、そのためのアプリケータ、及び関連した方法 |
| JP2021172367A Active JP7463328B2 (ja) | 2015-10-21 | 2021-10-21 | 皮膚上センサアセンブリを適用するためのアプリケータ |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021172367A Active JP7463328B2 (ja) | 2015-10-21 | 2021-10-21 | 皮膚上センサアセンブリを適用するためのアプリケータ |
Country Status (10)
| Country | Link |
|---|---|
| US (6) | US20170112534A1 (ja) |
| EP (2) | EP3364861B1 (ja) |
| JP (2) | JP6966426B2 (ja) |
| CN (4) | CN114767099A (ja) |
| AU (4) | AU2016341945B2 (ja) |
| CA (1) | CA2993280A1 (ja) |
| DK (1) | DK3364861T3 (ja) |
| ES (1) | ES2911676T3 (ja) |
| LT (1) | LT3364861T (ja) |
| WO (1) | WO2017070360A1 (ja) |
Families Citing this family (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190357827A1 (en) * | 2003-08-01 | 2019-11-28 | Dexcom, Inc. | Analyte sensor |
| US20080314395A1 (en) | 2005-08-31 | 2008-12-25 | Theuniversity Of Virginia Patent Foundation | Accuracy of Continuous Glucose Sensors |
| US7885698B2 (en) | 2006-02-28 | 2011-02-08 | Abbott Diabetes Care Inc. | Method and system for providing continuous calibration of implantable analyte sensors |
| US7653425B2 (en) | 2006-08-09 | 2010-01-26 | Abbott Diabetes Care Inc. | Method and system for providing calibration of an analyte sensor in an analyte monitoring system |
| WO2015122964A1 (en) | 2014-02-11 | 2015-08-20 | Dexcom, Inc. | Packaging system for analyte sensors |
| WO2017085624A1 (en) | 2015-11-20 | 2017-05-26 | Advanced Microfluidics Sa | Micropump |
| US10716896B2 (en) * | 2015-11-24 | 2020-07-21 | Insulet Corporation | Wearable automated medication delivery system |
| US20170188911A1 (en) | 2015-12-30 | 2017-07-06 | Dexcom, Inc. | Transcutaneous analyte sensor systems and methods |
| US20200352485A1 (en) * | 2016-04-08 | 2020-11-12 | Medtronic Minimed, Inc. | Sensor and transmitter product |
| USD815289S1 (en) * | 2016-12-22 | 2018-04-10 | Verily Life Sciences Llc | Glucose monitor |
| CN110461217B (zh) | 2017-01-23 | 2022-09-16 | 雅培糖尿病护理公司 | 用于分析物传感器插入的系统、装置和方法 |
| EP3612258A4 (en) * | 2017-04-19 | 2021-01-06 | Metronom Health, Inc. | INSERTER FOR ANALYSIS SENSORS |
| EP3406193B1 (en) * | 2017-05-23 | 2021-12-08 | Roche Diabetes Care GmbH | Sensor system and method for manufacturing thereof |
| US11395607B2 (en) * | 2017-06-19 | 2022-07-26 | Dexcom, Inc. | Applicators for applying transcutaneous analyte sensors and associated methods of manufacture |
| US11311240B2 (en) * | 2017-06-23 | 2022-04-26 | Dexcom, Inc. | Transcutaneous analyte sensors, applicators therefor, and associated methods |
| USD842996S1 (en) * | 2017-07-31 | 2019-03-12 | Verily Life Sciences Llc | Glucose monitoring skin patch |
| USD816229S1 (en) * | 2017-08-25 | 2018-04-24 | Verily Life Sciences Llc | Transmitter unit for a glucose monitoring skin patch |
| CN212438615U (zh) | 2017-10-24 | 2021-02-02 | 德克斯康公司 | 可穿戴设备 |
| US11331022B2 (en) | 2017-10-24 | 2022-05-17 | Dexcom, Inc. | Pre-connected analyte sensors |
| US11529458B2 (en) | 2017-12-08 | 2022-12-20 | Amf Medical Sa | Drug delivery device |
| DE102018101313B3 (de) | 2018-01-22 | 2019-05-02 | Eyesense Gmbh | Vorrichtung zur Analyse eines Patienten mittels eines transkutanen Sensors |
| US11730403B2 (en) * | 2018-02-06 | 2023-08-22 | Arnold Chase | Diversified glucose sensor system |
| US20210169518A1 (en) * | 2018-03-23 | 2021-06-10 | Phc Holdings Corporation | Sensor insertion device |
| US10588551B2 (en) | 2018-03-28 | 2020-03-17 | Dexcom, Inc. | Sensor cable support device including mechanical connectors |
| EP3787505A4 (en) | 2018-05-04 | 2022-03-16 | Dexcom, Inc. | SYSTEMS AND METHODS RELATING TO AN ANALYTE SENSOR SYSTEM HAVING A BATTERY LOCATED INSIDE A DISPOSABLE BASE |
| US20210236028A1 (en) * | 2018-05-17 | 2021-08-05 | Abbott Diabetes Care Inc. | Analyte sensor antimicrobial configurations and adhesives |
| USD888252S1 (en) | 2018-06-18 | 2020-06-23 | Dexcom, Inc. | Transcutaneous analyte sensor applicator |
| USD926325S1 (en) | 2018-06-22 | 2021-07-27 | Dexcom, Inc. | Wearable medical monitoring device |
| USD870291S1 (en) * | 2018-06-22 | 2019-12-17 | Dexcom, Inc. | Wearable medical monitoring device |
| KR102200138B1 (ko) * | 2018-07-31 | 2021-01-11 | 주식회사 아이센스 | 연속 혈당 측정 장치 |
| KR102197577B1 (ko) * | 2018-07-31 | 2021-01-05 | 주식회사 아이센스 | 연속 혈당 측정 장치 |
| CN113347925A (zh) * | 2019-03-20 | 2021-09-03 | 普和希控股公司 | 传感器插入装置 |
| WO2020219461A1 (en) | 2019-04-22 | 2020-10-29 | Dexcom, Inc. | Preconnected analyte sensors |
| CN109998555B (zh) * | 2019-04-30 | 2023-12-15 | 苏州百孝医疗科技有限公司 | 一种受体生理参数测量系统 |
| EP3968843A4 (en) * | 2019-05-14 | 2022-12-14 | Sanvita Medical Corporation | SUBCUTANEOUS ANALYTE SENSOR APPLICATOR AND CONTINUOUS MONITORING SYSTEM |
| CN110251141B (zh) * | 2019-06-26 | 2022-05-13 | 三诺生物传感股份有限公司 | 一种全自动传感器植入装置 |
| CN110338888A (zh) * | 2019-07-18 | 2019-10-18 | 浙江荷清柔性电子技术有限公司 | 植入施加器 |
| US11399747B2 (en) | 2019-08-02 | 2022-08-02 | Bionime Corporation | Physiological signal monitoring device |
| US20210030360A1 (en) * | 2019-08-02 | 2021-02-04 | Bionime Corporation | Physiological signal monitoring device |
| US11896804B2 (en) | 2019-08-02 | 2024-02-13 | Bionime Corporation | Insertion device for a biosensor and insertion method thereof |
| EP3771408A1 (en) | 2019-08-02 | 2021-02-03 | Bionime Corporation | Physiological signal monitoring system for fast assembly |
| AU2020294357B2 (en) * | 2019-08-02 | 2022-11-24 | Bionime Corporation | Physiological signal monitoring device |
| US11678846B2 (en) | 2019-08-02 | 2023-06-20 | Bionime Corporation | Insertion device for a biosensor |
| WO2021030761A1 (en) * | 2019-08-14 | 2021-02-18 | Hemotek Medical Incorporated | Needle safety systems |
| JPWO2021039335A1 (ja) * | 2019-08-29 | 2021-03-04 | ||
| WO2021046255A1 (en) * | 2019-09-03 | 2021-03-11 | Metronom Health, Inc. | Analyte sensor applicator |
| US20210088496A1 (en) * | 2019-09-19 | 2021-03-25 | Matthew Hummer | System and method for measuring chemicals, analytes and other factors in food |
| EP3797828A1 (de) * | 2019-09-27 | 2021-03-31 | Dyconex AG | Lösbare dichtung für medizinische implantate |
| US11375955B2 (en) * | 2019-12-18 | 2022-07-05 | Medtronic Minimed, Inc. | Systems for skin patch gravity resistance |
| US11690573B2 (en) | 2019-12-18 | 2023-07-04 | Medtronic Minimed, Inc. | Systems for skin patch gravity resistance |
| US20230068002A1 (en) * | 2020-02-20 | 2023-03-02 | Medtrum Technologies Inc. | Highly integrated analyte detection device |
| CN111331765B (zh) * | 2020-03-06 | 2021-02-26 | 西南交通大学 | 一种新型多功能预应力柔性气动机器人及其加工方法 |
| US11272884B2 (en) * | 2020-06-04 | 2022-03-15 | Medtronic Minimed, Inc. | Liner for adhesive skin patch |
| JP2023540275A (ja) * | 2020-08-31 | 2023-09-22 | アボット ダイアベティス ケア インコーポレイテッド | 検体センサー挿入のためのシステム、装置、及び方法 |
| US11241530B1 (en) | 2020-11-23 | 2022-02-08 | Amf Medical Sa | Insulin patch pump having photoplethysmography module |
| US11738140B2 (en) * | 2021-01-15 | 2023-08-29 | Medtronic Minimed, Inc. | Insertion device with linkage assembly |
| US11679199B2 (en) | 2021-06-01 | 2023-06-20 | Amf Medical Sa | Systems and methods for delivering microdoses of medication |
| US11857757B2 (en) | 2021-06-01 | 2024-01-02 | Tandem Diabetes Care Switzerland Sàrl | Systems and methods for delivering microdoses of medication |
| US11529460B1 (en) | 2021-06-01 | 2022-12-20 | Amf Medical Sa | Systems and methods for delivering microdoses of medication |
| WO2023028585A2 (en) * | 2021-08-26 | 2023-03-02 | Resilient Lifescience, Inc. | Method and apparatus for detection and auto-injection |
| US11654270B2 (en) | 2021-09-28 | 2023-05-23 | Biolinq Incorporated | Microneedle enclosure and applicator device for microneedle array based continuous analyte monitoring device |
| CN114403862A (zh) * | 2021-12-20 | 2022-04-29 | 苏州百孝医疗科技有限公司 | 保险机构及其使用方法 |
| CN114699071B (zh) * | 2022-06-06 | 2022-08-23 | 乐普(北京)医疗器械股份有限公司 | 一种持续血糖监测器的施加器及血糖监测器 |
Family Cites Families (217)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4757022A (en) | 1986-04-15 | 1988-07-12 | Markwell Medical Institute, Inc. | Biological fluid measuring device |
| US4994167A (en) | 1986-04-15 | 1991-02-19 | Markwell Medical Institute, Inc. | Biological fluid measuring device |
| US5515871A (en) * | 1990-09-28 | 1996-05-14 | Sulzer Brothers Ltd. | Hollow needle for medical use and a laser method for manufacturing |
| DK148592D0 (da) | 1992-12-10 | 1992-12-10 | Novo Nordisk As | Apparat |
| US5299571A (en) | 1993-01-22 | 1994-04-05 | Eli Lilly And Company | Apparatus and method for implantation of sensors |
| US5390671A (en) | 1994-03-15 | 1995-02-21 | Minimed Inc. | Transcutaneous sensor insertion set |
| US5586553A (en) | 1995-02-16 | 1996-12-24 | Minimed Inc. | Transcutaneous sensor insertion set |
| US5568806A (en) | 1995-02-16 | 1996-10-29 | Minimed Inc. | Transcutaneous sensor insertion set |
| US6197001B1 (en) | 1996-09-27 | 2001-03-06 | Becton Dickinson And Company | Vascular access device |
| US6093172A (en) | 1997-02-05 | 2000-07-25 | Minimed Inc. | Injector for a subcutaneous insertion set |
| US5851197A (en) | 1997-02-05 | 1998-12-22 | Minimed Inc. | Injector for a subcutaneous infusion set |
| US6607509B2 (en) | 1997-12-31 | 2003-08-19 | Medtronic Minimed, Inc. | Insertion device for an insertion set and method of using the same |
| US6741877B1 (en) | 1997-03-04 | 2004-05-25 | Dexcom, Inc. | Device and method for determining analyte levels |
| US20050033132A1 (en) | 1997-03-04 | 2005-02-10 | Shults Mark C. | Analyte measuring device |
| US9155496B2 (en) | 1997-03-04 | 2015-10-13 | Dexcom, Inc. | Low oxygen in vivo analyte sensor |
| US6862465B2 (en) | 1997-03-04 | 2005-03-01 | Dexcom, Inc. | Device and method for determining analyte levels |
| US7899511B2 (en) | 2004-07-13 | 2011-03-01 | Dexcom, Inc. | Low oxygen in vivo analyte sensor |
| US8527026B2 (en) | 1997-03-04 | 2013-09-03 | Dexcom, Inc. | Device and method for determining analyte levels |
| US6001067A (en) | 1997-03-04 | 1999-12-14 | Shults; Mark C. | Device and method for determining analyte levels |
| US6558321B1 (en) | 1997-03-04 | 2003-05-06 | Dexcom, Inc. | Systems and methods for remote monitoring and modulation of medical devices |
| US7657297B2 (en) | 2004-05-03 | 2010-02-02 | Dexcom, Inc. | Implantable analyte sensor |
| US7192450B2 (en) | 2003-05-21 | 2007-03-20 | Dexcom, Inc. | Porous membranes for use with implantable devices |
| US5954643A (en) | 1997-06-09 | 1999-09-21 | Minimid Inc. | Insertion set for a transcutaneous sensor |
| AU8031898A (en) | 1997-06-16 | 1999-01-04 | Elan Medical Technologies Limited | Methods of calibrating and testing a sensor for (in vivo) measurement of an analyte and devices for use in such methods |
| US6081736A (en) | 1997-10-20 | 2000-06-27 | Alfred E. Mann Foundation | Implantable enzyme-based monitoring systems adapted for long term use |
| US6119028A (en) | 1997-10-20 | 2000-09-12 | Alfred E. Mann Foundation | Implantable enzyme-based monitoring systems having improved longevity due to improved exterior surfaces |
| US6579690B1 (en) | 1997-12-05 | 2003-06-17 | Therasense, Inc. | Blood analyte monitoring through subcutaneous measurement |
| JP4647098B2 (ja) | 1997-12-31 | 2011-03-09 | メドトロニック ミニメド インコーポレイテッド | 挿入セットのための挿入装置 |
| DE69838526T2 (de) * | 1998-02-05 | 2008-07-03 | Biosense Webster, Inc., Diamond Bar | Gerät zum Freisetzen eines Medikaments im Herzen |
| US6134461A (en) | 1998-03-04 | 2000-10-17 | E. Heller & Company | Electrochemical analyte |
| US6175752B1 (en) | 1998-04-30 | 2001-01-16 | Therasense, Inc. | Analyte monitoring device and methods of use |
| US5993423A (en) | 1998-08-18 | 1999-11-30 | Choi; Soo Bong | Portable automatic syringe device and injection needle unit thereof |
| US6254586B1 (en) | 1998-09-25 | 2001-07-03 | Minimed Inc. | Method and kit for supplying a fluid to a subcutaneous placement site |
| US6424847B1 (en) | 1999-02-25 | 2002-07-23 | Medtronic Minimed, Inc. | Glucose monitor calibration methods |
| US7003336B2 (en) | 2000-02-10 | 2006-02-21 | Medtronic Minimed, Inc. | Analyte sensor method of making the same |
| US6695860B1 (en) | 2000-11-13 | 2004-02-24 | Isense Corp. | Transcutaneous sensor insertion device |
| US6560471B1 (en) | 2001-01-02 | 2003-05-06 | Therasense, Inc. | Analyte monitoring device and methods of use |
| JP3946468B2 (ja) | 2001-07-11 | 2007-07-18 | 三菱電機株式会社 | 光中継システムおよび光増幅中継器制御方法 |
| US20030032874A1 (en) | 2001-07-27 | 2003-02-13 | Dexcom, Inc. | Sensor head for use with implantable devices |
| US6702857B2 (en) | 2001-07-27 | 2004-03-09 | Dexcom, Inc. | Membrane for use with implantable devices |
| US6997921B2 (en) | 2001-09-07 | 2006-02-14 | Medtronic Minimed, Inc. | Infusion device and driving mechanism for same |
| US8858434B2 (en) | 2004-07-13 | 2014-10-14 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US9247901B2 (en) | 2003-08-22 | 2016-02-02 | Dexcom, Inc. | Systems and methods for replacing signal artifacts in a glucose sensor data stream |
| US7613491B2 (en) | 2002-05-22 | 2009-11-03 | Dexcom, Inc. | Silicone based membranes for use in implantable glucose sensors |
| US8364229B2 (en) | 2003-07-25 | 2013-01-29 | Dexcom, Inc. | Analyte sensors having a signal-to-noise ratio substantially unaffected by non-constant noise |
| US8010174B2 (en) | 2003-08-22 | 2011-08-30 | Dexcom, Inc. | Systems and methods for replacing signal artifacts in a glucose sensor data stream |
| US7379765B2 (en) | 2003-07-25 | 2008-05-27 | Dexcom, Inc. | Oxygen enhancing membrane systems for implantable devices |
| US8260393B2 (en) | 2003-07-25 | 2012-09-04 | Dexcom, Inc. | Systems and methods for replacing signal data artifacts in a glucose sensor data stream |
| US9282925B2 (en) | 2002-02-12 | 2016-03-15 | Dexcom, Inc. | Systems and methods for replacing signal artifacts in a glucose sensor data stream |
| US6936006B2 (en) | 2002-03-22 | 2005-08-30 | Novo Nordisk, A/S | Atraumatic insertion of a subcutaneous device |
| US7343188B2 (en) | 2002-05-09 | 2008-03-11 | Lifescan, Inc. | Devices and methods for accessing and analyzing physiological fluid |
| US20060258761A1 (en) | 2002-05-22 | 2006-11-16 | Robert Boock | Silicone based membranes for use in implantable glucose sensors |
| US7226978B2 (en) | 2002-05-22 | 2007-06-05 | Dexcom, Inc. | Techniques to improve polyurethane membranes for implantable glucose sensors |
| US7381184B2 (en) | 2002-11-05 | 2008-06-03 | Abbott Diabetes Care Inc. | Sensor inserter assembly |
| US6932584B2 (en) | 2002-12-26 | 2005-08-23 | Medtronic Minimed, Inc. | Infusion device and driving mechanism and process for same with actuator for multiple infusion uses |
| US7228162B2 (en) | 2003-01-13 | 2007-06-05 | Isense Corporation | Analyte sensor |
| US7134999B2 (en) | 2003-04-04 | 2006-11-14 | Dexcom, Inc. | Optimized sensor geometry for an implantable glucose sensor |
| US6926694B2 (en) | 2003-05-09 | 2005-08-09 | Medsolve Technologies, Llc | Apparatus and method for delivery of therapeutic and/or diagnostic agents |
| US7875293B2 (en) | 2003-05-21 | 2011-01-25 | Dexcom, Inc. | Biointerface membranes incorporating bioactive agents |
| US7510564B2 (en) * | 2003-06-27 | 2009-03-31 | Abbott Diabetes Care Inc. | Lancing device |
| US20050051427A1 (en) | 2003-07-23 | 2005-03-10 | Brauker James H. | Rolled electrode array and its method for manufacture |
| US7424318B2 (en) | 2003-12-05 | 2008-09-09 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| JP2007500336A (ja) | 2003-07-25 | 2007-01-11 | デックスコム・インコーポレーテッド | 電気化学センサーに用いる電極システム |
| WO2007120442A2 (en) | 2003-07-25 | 2007-10-25 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US20050176136A1 (en) | 2003-11-19 | 2005-08-11 | Dexcom, Inc. | Afinity domain for analyte sensor |
| US9763609B2 (en) | 2003-07-25 | 2017-09-19 | Dexcom, Inc. | Analyte sensors having a signal-to-noise ratio substantially unaffected by non-constant noise |
| US8423113B2 (en) | 2003-07-25 | 2013-04-16 | Dexcom, Inc. | Systems and methods for processing sensor data |
| WO2005019795A2 (en) | 2003-07-25 | 2005-03-03 | Dexcom, Inc. | Electrochemical sensors including electrode systems with increased oxygen generation |
| US7467003B2 (en) | 2003-12-05 | 2008-12-16 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| WO2005012871A2 (en) | 2003-07-25 | 2005-02-10 | Dexcom, Inc. | Increasing bias for oxygen production in an electrode system |
| US7366556B2 (en) | 2003-12-05 | 2008-04-29 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US7460898B2 (en) | 2003-12-05 | 2008-12-02 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US7959569B2 (en) | 2003-08-01 | 2011-06-14 | Dexcom, Inc. | System and methods for processing analyte sensor data |
| US20100168657A1 (en) | 2003-08-01 | 2010-07-01 | Dexcom, Inc. | System and methods for processing analyte sensor data |
| US8160669B2 (en) | 2003-08-01 | 2012-04-17 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US8626257B2 (en) | 2003-08-01 | 2014-01-07 | Dexcom, Inc. | Analyte sensor |
| US8845536B2 (en) | 2003-08-01 | 2014-09-30 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US7519408B2 (en) | 2003-11-19 | 2009-04-14 | Dexcom, Inc. | Integrated receiver for continuous analyte sensor |
| US7591801B2 (en) | 2004-02-26 | 2009-09-22 | Dexcom, Inc. | Integrated delivery device for continuous glucose sensor |
| US8761856B2 (en) | 2003-08-01 | 2014-06-24 | Dexcom, Inc. | System and methods for processing analyte sensor data |
| US7774145B2 (en) | 2003-08-01 | 2010-08-10 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US8369919B2 (en) | 2003-08-01 | 2013-02-05 | Dexcom, Inc. | Systems and methods for processing sensor data |
| US8886273B2 (en) | 2003-08-01 | 2014-11-11 | Dexcom, Inc. | Analyte sensor |
| US9135402B2 (en) | 2007-12-17 | 2015-09-15 | Dexcom, Inc. | Systems and methods for processing sensor data |
| US6931327B2 (en) | 2003-08-01 | 2005-08-16 | Dexcom, Inc. | System and methods for processing analyte sensor data |
| US8275437B2 (en) | 2003-08-01 | 2012-09-25 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US20070208245A1 (en) | 2003-08-01 | 2007-09-06 | Brauker James H | Transcutaneous analyte sensor |
| US7920906B2 (en) | 2005-03-10 | 2011-04-05 | Dexcom, Inc. | System and methods for processing analyte sensor data for sensor calibration |
| US20050090607A1 (en) | 2003-10-28 | 2005-04-28 | Dexcom, Inc. | Silicone composition for biocompatible membrane |
| US7699807B2 (en) | 2003-11-10 | 2010-04-20 | Smiths Medical Asd, Inc. | Device and method for insertion of a cannula of an infusion device |
| US20080197024A1 (en) | 2003-12-05 | 2008-08-21 | Dexcom, Inc. | Analyte sensor |
| US8532730B2 (en) | 2006-10-04 | 2013-09-10 | Dexcom, Inc. | Analyte sensor |
| US8364230B2 (en) | 2006-10-04 | 2013-01-29 | Dexcom, Inc. | Analyte sensor |
| US8425417B2 (en) | 2003-12-05 | 2013-04-23 | Dexcom, Inc. | Integrated device for continuous in vivo analyte detection and simultaneous control of an infusion device |
| US8425416B2 (en) | 2006-10-04 | 2013-04-23 | Dexcom, Inc. | Analyte sensor |
| EP1711790B1 (en) | 2003-12-05 | 2010-09-08 | DexCom, Inc. | Calibration techniques for a continuous analyte sensor |
| US20100185071A1 (en) | 2003-12-05 | 2010-07-22 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US8364231B2 (en) | 2006-10-04 | 2013-01-29 | Dexcom, Inc. | Analyte sensor |
| US8287453B2 (en) | 2003-12-05 | 2012-10-16 | Dexcom, Inc. | Analyte sensor |
| US8423114B2 (en) | 2006-10-04 | 2013-04-16 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US20080200788A1 (en) | 2006-10-04 | 2008-08-21 | Dexcorn, Inc. | Analyte sensor |
| WO2005057173A2 (en) | 2003-12-08 | 2005-06-23 | Dexcom, Inc. | Systems and methods for improving electrochemical analyte sensors |
| EP1711791B1 (en) | 2003-12-09 | 2014-10-15 | DexCom, Inc. | Signal processing for continuous analyte sensor |
| US7637868B2 (en) | 2004-01-12 | 2009-12-29 | Dexcom, Inc. | Composite material for implantable device |
| US20050182451A1 (en) | 2004-01-12 | 2005-08-18 | Adam Griffin | Implantable device with improved radio frequency capabilities |
| WO2005079257A2 (en) | 2004-02-12 | 2005-09-01 | Dexcom, Inc. | Biointerface with macro- and micro- architecture |
| US8808228B2 (en) | 2004-02-26 | 2014-08-19 | Dexcom, Inc. | Integrated medicament delivery device for use with continuous analyte sensor |
| US8792955B2 (en) | 2004-05-03 | 2014-07-29 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US20050245799A1 (en) | 2004-05-03 | 2005-11-03 | Dexcom, Inc. | Implantable analyte sensor |
| US8277713B2 (en) | 2004-05-03 | 2012-10-02 | Dexcom, Inc. | Implantable analyte sensor |
| US7585287B2 (en) | 2004-06-16 | 2009-09-08 | Smiths Medical Md, Inc. | Device and method for insertion of a cannula of an infusion device |
| US20060015020A1 (en) | 2004-07-06 | 2006-01-19 | Dexcom, Inc. | Systems and methods for manufacture of an analyte-measuring device including a membrane system |
| US8565848B2 (en) | 2004-07-13 | 2013-10-22 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US7783333B2 (en) | 2004-07-13 | 2010-08-24 | Dexcom, Inc. | Transcutaneous medical device with variable stiffness |
| US20060270922A1 (en) | 2004-07-13 | 2006-11-30 | Brauker James H | Analyte sensor |
| US20080242961A1 (en) | 2004-07-13 | 2008-10-02 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US7857760B2 (en) | 2004-07-13 | 2010-12-28 | Dexcom, Inc. | Analyte sensor |
| US8452368B2 (en) | 2004-07-13 | 2013-05-28 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US7905833B2 (en) | 2004-07-13 | 2011-03-15 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US7697967B2 (en) * | 2005-12-28 | 2010-04-13 | Abbott Diabetes Care Inc. | Method and apparatus for providing analyte sensor insertion |
| US9788771B2 (en) | 2006-10-23 | 2017-10-17 | Abbott Diabetes Care Inc. | Variable speed sensor insertion devices and methods of use |
| US20070027381A1 (en) | 2005-07-29 | 2007-02-01 | Therasense, Inc. | Inserter and methods of use |
| US10226207B2 (en) | 2004-12-29 | 2019-03-12 | Abbott Diabetes Care Inc. | Sensor inserter having introducer |
| US7731657B2 (en) | 2005-08-30 | 2010-06-08 | Abbott Diabetes Care Inc. | Analyte sensor introducer and methods of use |
| US8029441B2 (en) | 2006-02-28 | 2011-10-04 | Abbott Diabetes Care Inc. | Analyte sensor transmitter unit configuration for a data monitoring and management system |
| US20090105569A1 (en) | 2006-04-28 | 2009-04-23 | Abbott Diabetes Care, Inc. | Introducer Assembly and Methods of Use |
| US7704229B2 (en) | 2005-02-03 | 2010-04-27 | Medtronic Minimed, Inc. | Insertion device |
| US8133178B2 (en) | 2006-02-22 | 2012-03-13 | Dexcom, Inc. | Analyte sensor |
| US20090076360A1 (en) * | 2007-09-13 | 2009-03-19 | Dexcom, Inc. | Transcutaneous analyte sensor |
| US20060249381A1 (en) | 2005-05-05 | 2006-11-09 | Petisce James R | Cellulosic-based resistance domain for an analyte sensor |
| WO2006110193A2 (en) | 2005-04-08 | 2006-10-19 | Dexcom, Inc. | Cellulosic-based interference domain for an analyte sensor |
| US8744546B2 (en) | 2005-05-05 | 2014-06-03 | Dexcom, Inc. | Cellulosic-based resistance domain for an analyte sensor |
| US8060174B2 (en) | 2005-04-15 | 2011-11-15 | Dexcom, Inc. | Analyte sensing biointerface |
| WO2006113618A1 (en) | 2005-04-15 | 2006-10-26 | Dexcom, Inc. | Analyte sensing biointerface |
| US7905868B2 (en) | 2006-08-23 | 2011-03-15 | Medtronic Minimed, Inc. | Infusion medium delivery device and method with drive device for driving plunger in reservoir |
| US7641649B2 (en) | 2005-05-06 | 2010-01-05 | Medtronic Minimed, Inc. | Reservoir support and method for infusion device |
| US20070060801A1 (en) | 2005-08-31 | 2007-03-15 | Isense Corporation | Transcutaneous introducer assembly |
| US20070173706A1 (en) * | 2005-11-11 | 2007-07-26 | Isense Corporation | Method and apparatus for insertion of a sensor |
| EP2004796B1 (en) | 2006-01-18 | 2015-04-08 | DexCom, Inc. | Membranes for an analyte sensor |
| US7736310B2 (en) | 2006-01-30 | 2010-06-15 | Abbott Diabetes Care Inc. | On-body medical device securement |
| EP1991110B1 (en) | 2006-03-09 | 2018-11-07 | DexCom, Inc. | Systems and methods for processing analyte sensor data |
| WO2007120381A2 (en) | 2006-04-14 | 2007-10-25 | Dexcom, Inc. | Analyte sensor |
| US7789857B2 (en) | 2006-08-23 | 2010-09-07 | Medtronic Minimed, Inc. | Infusion medium delivery system, device and method with needle inserter and needle inserter device and method |
| US8449464B2 (en) | 2006-10-04 | 2013-05-28 | Dexcom, Inc. | Analyte sensor |
| US7831287B2 (en) | 2006-10-04 | 2010-11-09 | Dexcom, Inc. | Dual electrode system for a continuous analyte sensor |
| US8447376B2 (en) | 2006-10-04 | 2013-05-21 | Dexcom, Inc. | Analyte sensor |
| US8298142B2 (en) | 2006-10-04 | 2012-10-30 | Dexcom, Inc. | Analyte sensor |
| US8478377B2 (en) | 2006-10-04 | 2013-07-02 | Dexcom, Inc. | Analyte sensor |
| US8275438B2 (en) | 2006-10-04 | 2012-09-25 | Dexcom, Inc. | Analyte sensor |
| US8562528B2 (en) | 2006-10-04 | 2013-10-22 | Dexcom, Inc. | Analyte sensor |
| ATE485858T1 (de) | 2007-03-14 | 2010-11-15 | Hoffmann La Roche | Insertionskopf für medizinische oder pharmazeutische anwendungen |
| DK1970084T3 (da) | 2007-03-14 | 2010-11-22 | Hoffmann La Roche | Indføringsapparat til en indføringshoved, især til et infusionssæt |
| DK1970083T3 (en) | 2007-03-14 | 2017-09-11 | Hoffmann La Roche | Insertion device for an insertion head, especially for an infusion set |
| US20100113897A1 (en) * | 2007-03-19 | 2010-05-06 | Bayer Health Care Llc | Continuous analyte monitoring assembly and methods of using the same |
| US20080306434A1 (en) | 2007-06-08 | 2008-12-11 | Dexcom, Inc. | Integrated medicament delivery device for use with continuous analyte sensor |
| US8002752B2 (en) * | 2007-06-25 | 2011-08-23 | Medingo, Ltd. | Protector apparatus |
| DE102007049446A1 (de) | 2007-10-16 | 2009-04-23 | Cequr Aps | Katheter-Einführeinrichtung |
| US8417312B2 (en) | 2007-10-25 | 2013-04-09 | Dexcom, Inc. | Systems and methods for processing sensor data |
| US8290559B2 (en) | 2007-12-17 | 2012-10-16 | Dexcom, Inc. | Systems and methods for processing sensor data |
| US20090299155A1 (en) | 2008-01-30 | 2009-12-03 | Dexcom, Inc. | Continuous cardiac marker sensor system |
| CA2715624A1 (en) | 2008-02-20 | 2009-08-27 | Dexcom, Inc. | Continuous medicament sensor system for in vivo use |
| CA2715628A1 (en) | 2008-02-21 | 2009-08-27 | Dexcom, Inc. | Systems and methods for processing, transmitting and displaying sensor data |
| JP5581310B2 (ja) * | 2008-03-17 | 2014-08-27 | アイセンス コーポレーション | 分析対象物センササブアセンブリ |
| US8396528B2 (en) | 2008-03-25 | 2013-03-12 | Dexcom, Inc. | Analyte sensor |
| US20090242399A1 (en) | 2008-03-25 | 2009-10-01 | Dexcom, Inc. | Analyte sensor |
| US8682408B2 (en) | 2008-03-28 | 2014-03-25 | Dexcom, Inc. | Polymer membranes for continuous analyte sensors |
| US20090247856A1 (en) | 2008-03-28 | 2009-10-01 | Dexcom, Inc. | Polymer membranes for continuous analyte sensors |
| US8583204B2 (en) | 2008-03-28 | 2013-11-12 | Dexcom, Inc. | Polymer membranes for continuous analyte sensors |
| US9295786B2 (en) | 2008-05-28 | 2016-03-29 | Medtronic Minimed, Inc. | Needle protective device for subcutaneous sensors |
| JP5125876B2 (ja) | 2008-08-20 | 2013-01-23 | ニプロ株式会社 | 挿入装置 |
| US8560039B2 (en) | 2008-09-19 | 2013-10-15 | Dexcom, Inc. | Particle-containing membrane and particulate electrode for analyte sensors |
| US8409118B2 (en) * | 2008-09-26 | 2013-04-02 | University Of Delaware | Upper arm wearable exoskeleton |
| US20100331644A1 (en) | 2008-11-07 | 2010-12-30 | Dexcom, Inc. | Housing for an intravascular sensor |
| US20100198034A1 (en) | 2009-02-03 | 2010-08-05 | Abbott Diabetes Care Inc. | Compact On-Body Physiological Monitoring Devices and Methods Thereof |
| US9446194B2 (en) | 2009-03-27 | 2016-09-20 | Dexcom, Inc. | Methods and systems for promoting glucose management |
| EP2272553A1 (en) | 2009-06-29 | 2011-01-12 | Unomedical A/S | Inserter Assembly |
| US20110004085A1 (en) | 2009-04-30 | 2011-01-06 | Dexcom, Inc. | Performance reports associated with continuous sensor data from multiple analysis time periods |
| US10376213B2 (en) * | 2009-06-30 | 2019-08-13 | Waveform Technologies, Inc. | System, method and apparatus for sensor insertion |
| US9351677B2 (en) | 2009-07-02 | 2016-05-31 | Dexcom, Inc. | Analyte sensor with increased reference capacity |
| US20110027458A1 (en) | 2009-07-02 | 2011-02-03 | Dexcom, Inc. | Continuous analyte sensors and methods of making same |
| DK3689237T3 (da) * | 2009-07-23 | 2021-08-16 | Abbott Diabetes Care Inc | Fremgangsmåde til fremstilling og system til kontinuerlig analytmåling |
| US20120157922A1 (en) * | 2009-08-06 | 2012-06-21 | Medx-Set Ltd. | Inserter mechanisms |
| US8323249B2 (en) | 2009-08-14 | 2012-12-04 | The Regents Of The University Of Michigan | Integrated vascular delivery system |
| US20110106126A1 (en) | 2009-08-31 | 2011-05-05 | Michael Love | Inserter device including rotor subassembly |
| EP2482724A2 (en) | 2009-09-30 | 2012-08-08 | Dexcom, Inc. | Transcutaneous analyte sensor |
| WO2011044386A1 (en) * | 2009-10-07 | 2011-04-14 | Abbott Diabetes Care Inc. | Sensor inserter assembly having rotatable trigger |
| WO2011051922A2 (en) | 2009-11-02 | 2011-05-05 | Università Degli Studi Di Padova | Method to recalibrate continuous glucose monitoring data on-line |
| US9041730B2 (en) | 2010-02-12 | 2015-05-26 | Dexcom, Inc. | Receivers for analyzing and displaying sensor data |
| WO2011119898A1 (en) | 2010-03-24 | 2011-09-29 | Abbott Diabetes Care Inc. | Medical device inserters and processes of inserting and using medical devices |
| CN102639185B (zh) | 2010-03-24 | 2015-02-04 | 雅培糖尿病护理公司 | 医疗装置插入物以及插入和使用医疗装置的方法 |
| WO2011163519A2 (en) | 2010-06-25 | 2011-12-29 | Dexcom, Inc. | Systems and methods for communicating sensor data between communication devices |
| DK2422693T3 (en) * | 2010-08-27 | 2019-03-11 | Hoffmann La Roche | Device and method for performing at least one medical function |
| US10231653B2 (en) | 2010-09-29 | 2019-03-19 | Dexcom, Inc. | Advanced continuous analyte monitoring system |
| EP2632334B1 (en) | 2010-10-27 | 2020-09-09 | Dexcom, Inc. | Continuous analyte monitor data recording device operable in a blinded mode |
| US20120303043A1 (en) | 2011-02-28 | 2012-11-29 | Abbott Diabetes Care Inc. | Medical Device Inserters and Processes of Inserting and Using Medical Devices |
| US9002390B2 (en) | 2011-04-08 | 2015-04-07 | Dexcom, Inc. | Systems and methods for processing and transmitting sensor data |
| WO2012142502A2 (en) | 2011-04-15 | 2012-10-18 | Dexcom Inc. | Advanced analyte sensor calibration and error detection |
| WO2012158950A1 (en) | 2011-05-17 | 2012-11-22 | Cross Match Technologies, Inc. | Fingerprint sensors |
| WO2013016573A1 (en) * | 2011-07-26 | 2013-01-31 | Glysens Incorporated | Tissue implantable sensor with hermetically sealed housing |
| US20130035865A1 (en) | 2011-08-05 | 2013-02-07 | Dexcom, Inc. | Systems and methods for detecting glucose level data patterns |
| EP4218570A3 (en) | 2011-08-26 | 2023-10-04 | DexCom, Inc. | Polymer membranes for continuous analyte sensors |
| CN103930029B (zh) | 2011-09-23 | 2016-11-23 | 德克斯康公司 | 用于处理和传输传感器数据的系统和方法 |
| CA2806765C (en) * | 2012-03-08 | 2020-09-22 | Isense Corporation | Method and apparatus for insertion of a sensor |
| JP6054943B2 (ja) * | 2012-03-13 | 2016-12-27 | テルモ株式会社 | センサ挿入装置 |
| US9615779B2 (en) * | 2012-04-04 | 2017-04-11 | Dexcom, Inc. | Transcutaneous analyte sensors, applicators therefor, and associated methods |
| US10453573B2 (en) | 2012-06-05 | 2019-10-22 | Dexcom, Inc. | Dynamic report building |
| US10598627B2 (en) | 2012-06-29 | 2020-03-24 | Dexcom, Inc. | Devices, systems, and methods to compensate for effects of temperature on implantable sensors |
| US10881339B2 (en) | 2012-06-29 | 2021-01-05 | Dexcom, Inc. | Use of sensor redundancy to detect sensor failures |
| US9743871B2 (en) * | 2012-09-24 | 2017-08-29 | Dexcom, Inc. | Multiple electrode system for a continuous analyte sensor, and related methods |
| WO2014045448A1 (ja) * | 2012-09-24 | 2014-03-27 | テルモ株式会社 | センサ挿入装置及びセンサ挿入方法 |
| US9788765B2 (en) | 2012-09-28 | 2017-10-17 | Dexcom, Inc. | Zwitterion surface modifications for continuous sensors |
| US20140107450A1 (en) | 2012-10-12 | 2014-04-17 | Dexcom, Inc. | Sensors for continuous analyte monitoring, and related methods |
| US9119529B2 (en) | 2012-10-30 | 2015-09-01 | Dexcom, Inc. | Systems and methods for dynamically and intelligently monitoring a host's glycemic condition after an alert is triggered |
| US20140129151A1 (en) | 2012-11-07 | 2014-05-08 | Dexcom, Inc. | Systems and methods for managing glycemic variability |
| US9211092B2 (en) | 2013-01-03 | 2015-12-15 | Dexcom, Inc. | End of life detection for analyte sensors |
| DE102013224431B4 (de) * | 2013-11-28 | 2015-06-18 | 4A Engineering Gmbh | Setzhilfe zum Setzen eines Katheters für Diabetiker |
| CN104887242B (zh) * | 2014-03-07 | 2018-08-28 | 上海移宇科技股份有限公司 | 分析物传感系统 |
-
2016
- 2016-10-20 JP JP2018513507A patent/JP6966426B2/ja active Active
- 2016-10-20 DK DK16858223.7T patent/DK3364861T3/da active
- 2016-10-20 CA CA2993280A patent/CA2993280A1/en active Pending
- 2016-10-20 US US15/299,132 patent/US20170112534A1/en not_active Abandoned
- 2016-10-20 EP EP16858223.7A patent/EP3364861B1/en active Active
- 2016-10-20 AU AU2016341945A patent/AU2016341945B2/en active Active
- 2016-10-20 US US15/298,990 patent/US10278732B2/en active Active
- 2016-10-20 EP EP22150156.2A patent/EP4046571B1/en active Active
- 2016-10-20 CN CN202210375885.8A patent/CN114767099A/zh active Pending
- 2016-10-20 US US15/298,721 patent/US10595900B2/en active Active
- 2016-10-20 US US15/299,075 patent/US20170112533A1/en not_active Abandoned
- 2016-10-20 CN CN201680048135.2A patent/CN108024716B/zh active Active
- 2016-10-20 WO PCT/US2016/057933 patent/WO2017070360A1/en active Application Filing
- 2016-10-20 ES ES16858223T patent/ES2911676T3/es active Active
- 2016-10-20 LT LTEPPCT/US2016/057933T patent/LT3364861T/lt unknown
- 2016-10-21 CN CN201721601714.3U patent/CN209252875U/zh active Active
- 2016-10-21 CN CN201621146753.4U patent/CN206777328U/zh active Active
-
2019
- 2019-09-10 AU AU2019226297A patent/AU2019226297C1/en active Active
-
2020
- 2020-02-06 US US16/784,198 patent/US20200170671A1/en not_active Abandoned
-
2021
- 2021-10-21 JP JP2021172367A patent/JP7463328B2/ja active Active
- 2021-10-22 AU AU2021254662A patent/AU2021254662A1/en not_active Abandoned
-
2022
- 2022-10-07 US US17/962,308 patent/US20230032816A1/en active Pending
-
2023
- 2023-08-23 AU AU2023219873A patent/AU2023219873A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6966426B2 (ja) | 経皮分析物センサ、そのためのアプリケータ、及び関連した方法 | |
| JP7416747B2 (ja) | 皮膚上センサアセンブリを受容者の皮膚に適用するためのシステム | |
| CN110996775A (zh) | 经皮分析物传感器,其施加器以及相关方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191017 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201019 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201016 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210921 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6966426 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |