以下、図面を参照しながら、本発明の実施形態に係るプロジェクターについて説明する。
なお、本発明の範囲は、以下の実施の形態に限定されず、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせる場合がある。
図1は、本実施形態のプロジェクター500を示す概略構成図である。図1に示すように、本実施形態のプロジェクター500は、光源装置200と、平行化レンズ305と、照明光学系310と、色分離光学系320と、3つの液晶ライトバルブ(光変調装置)330R,330G,330Bと、クロスダイクロイックプリズム340と、投射光学系350と、を備えている。
光源装置200から射出された光は、平行化レンズ305を通過して照明光学系310に入射する。平行化レンズ305は、光源装置200からの光を平行化する。
照明光学系310は、光源装置200から射出される光の照度を、液晶ライトバルブ330R,330G,330B上において均一化するように調整する。さらに、照明光学系310は、光源装置200から射出される光の偏光方向を一方向に揃える。その理由は、光源装置200から射出される光を液晶ライトバルブ330R,330G,330Bで有効に利用するためである。
照度分布と偏光方向とが調整された光は、色分離光学系320に入射する。色分離光学系320は、入射光を赤色光(R)、緑色光(G)、青色光(B)の3つの色光に分離する。3つの色光は、各色光に対応付けられた液晶ライトバルブ330R,330G,330Bにより、画像信号に応じてそれぞれ変調される。液晶ライトバルブ330R,330G,330Bは、後述する液晶パネル560R,560G,560Bと、偏光板(図示せず)と、を備えている。偏光板は、液晶パネル560R,560G,560Bのそれぞれの光入射側および光射出側に配置される。
変調された3つの色光は、クロスダイクロイックプリズム340により合成される。合成光は投射光学系350に入射する。投射光学系350は、入射光をスクリーン700(図3参照)に投射する。これにより、スクリーン700上に画像が表示される。なお、平行化レンズ305、照明光学系310、色分離光学系320、クロスダイクロイックプリズム340、投射光学系350の各々の構成としては、周知の構成を採用することができる。
図2は、光源装置200の構成を示す断面図である。光源装置200は、光源ユニット210と、放電灯点灯装置(放電灯駆動装置)10と、を備えている。図2には、光源ユニット210の断面図が示されている。光源ユニット210は、主反射鏡112と、放電灯90と、副反射鏡113と、を備えている。
放電灯点灯装置10は、放電灯90に駆動電流Iを供給して放電灯90を点灯させる。主反射鏡112は、放電灯90から放出された光を照射方向Dに向けて反射する。照射方向Dは、放電灯90の光軸AXと平行である。
放電灯90の形状は、照射方向Dに沿って延びる棒状である。放電灯90の一方の端部を第1端部90e1とし、放電灯90の他方の端部を第2端部90e2とする。放電灯90の材料は、例えば、石英ガラス等の透光性材料である。放電灯90の中央部は球状に膨らんでおり、その内部は放電空間91である。放電空間91には、希ガス、金属ハロゲン化合物等を含む放電媒体であるガスが封入されている。
放電空間91には、第1電極92および第2電極93の先端が突出している。第1電極92は、放電空間91の第1端部90e1側に配置されている。第2電極93は、放電空間91の第2端部90e2側に配置されている。第1電極92および第2電極93の形状は、光軸AXに沿って延びる棒状である。放電空間91には、第1電極92および第2電極93の電極先端部が、所定距離だけ離れて対向するように配置されている。第1電極92および第2電極93の材料は、例えば、タングステン等の金属である。
放電灯90の第1端部90e1に、第1端子536が設けられている。第1端子536と第1電極92とは、放電灯90の内部を貫通する導電性部材534により電気的に接続されている。同様に、放電灯90の第2端部90e2に、第2端子546が設けられている。第2端子546と第2電極93とは、放電灯90の内部を貫通する導電性部材544により電気的に接続されている。第1端子536および第2端子546の材料は、例えば、タングステン等の金属である。導電性部材534,544の材料としては、例えば、モリブデン箔が利用される。
第1端子536および第2端子546は、放電灯点灯装置10に接続されている。放電灯点灯装置10は、第1端子536および第2端子546に、放電灯90を駆動するための駆動電流Iを供給する。その結果、第1電極92および第2電極93の間でアーク放電が起きる。アーク放電により発生した光(放電光)は、破線の矢印で示すように、放電位置から全方向に向かって放射される。
主反射鏡112は、固定部材114により、放電灯90の第1端部90e1に固定されている。主反射鏡112は、放電光のうち、照射方向Dと反対側に向かって進む光を照射方向Dに向かって反射する。主反射鏡112の反射面(放電灯90側の面)の形状は、放電光を照射方向Dに向かって反射できる範囲内において、特に限定されず、例えば、回転楕円形状であっても、回転放物線形状であってもよい。例えば、主反射鏡112の反射面の形状を回転放物線形状とした場合、主反射鏡112は、放電光を光軸AXに略平行な光に変換することができる。これにより、平行化レンズ305を省略することができる。
副反射鏡113は、固定部材522により、放電灯90の第2端部90e2側に固定されている。副反射鏡113の反射面(放電灯90側の面)の形状は、放電空間91の第2端部90e2側の部分を囲む球面形状である。副反射鏡113は、放電光のうち、主反射鏡112が配置された側と反対側に向かって進む光を主反射鏡112に向かって反射する。これにより、放電空間91から放射される光の利用効率を高めることができる。
固定部材114,522の材料は、放電灯90からの発熱に耐え得る耐熱材料である範囲内において、特に限定されず、例えば、無機接着剤である。主反射鏡112および副反射鏡113と放電灯90との配置を固定する方法としては、主反射鏡112および副反射鏡113を放電灯90に固定する方法に限らず、任意の方法を採用できる。例えば、放電灯90と主反射鏡112とを、独立にプロジェクター500の筐体(図示せず)に固定してもよい。副反射鏡113についても同様である。
以下、プロジェクター500の回路構成について説明する。
図3は、本実施形態のプロジェクター500の回路構成の一例を示す図である。プロジェクター500は、図1に示した光学系の他、画像信号変換部510と、直流電源装置80と、液晶パネル560R,560G,560Bと、画像処理装置570と、CPU(Central Processing Unit)580と、を備えている。
画像信号変換部510は、外部から入力された画像信号502(輝度−色差信号やアナログRGB信号など)を所定のワード長のデジタルRGB信号に変換して画像信号512R,512G,512Bを生成し、画像処理装置570に供給する。
画像処理装置570は、3つの画像信号512R,512G,512Bに対してそれぞれ画像処理を行う。画像処理装置570は、液晶パネル560R,560G,560Bをそれぞれ駆動するための駆動信号572R,572G,572Bを液晶パネル560R,560G,560Bに供給する。
直流電源装置80は、外部の交流電源600から供給される交流電圧を一定の直流電圧に変換する。直流電源装置80は、トランス(図示しないが、直流電源装置80に含まれる)の2次側にある画像信号変換部510、画像処理装置570およびトランスの1次側にある放電灯点灯装置10に直流電圧を供給する。
放電灯点灯装置10は、起動時に放電灯90の電極間に高電圧を発生し、絶縁破壊を生じさせて放電路を形成する。以後、放電灯点灯装置10は、放電灯90が放電を維持するための駆動電流Iを供給する。
液晶パネル560R,560G,560Bは、前述した液晶ライトバルブ330R,330G,330Bにそれぞれ備えられている。液晶パネル560R,560G,560Bは、それぞれ駆動信号572R,572G,572Bに基づいて、前述した光学系を介して各液晶パネル560R,560G,560Bに入射される色光の透過率(輝度)を変調する。
CPU580は、プロジェクター500の点灯開始から消灯に至るまでの各種の動作を制御する。例えば、図3の例では、通信信号582を介して点灯命令や消灯命令を放電灯点灯装置10に出力する。CPU580は、放電灯点灯装置10から通信信号584を介して放電灯90の点灯情報を受け取る。
以下、放電灯点灯装置10の構成について説明する。
図4は、放電灯点灯装置10の回路構成の一例を示す図である。
放電灯点灯装置10は、図4に示すように、電力制御回路20と、極性反転回路30と、制御部40と、動作検出部60と、イグナイター回路70と、を備えている。
電力制御回路20は、放電灯90に供給する駆動電力Wdを生成する。本実施形態においては、電力制御回路20は、直流電源装置80からの電圧を入力とし、入力電圧を降圧して直流電流Idを出力するダウンチョッパー回路で構成されている。
電力制御回路20は、スイッチ素子21、ダイオード22、コイル23およびコンデンサー24を含んで構成される。スイッチ素子21は、例えば、トランジスターで構成される。本実施形態においては、スイッチ素子21の一端は直流電源装置80の正電圧側に接続され、他端はダイオード22のカソード端子およびコイル23の一端に接続されている。
コイル23の他端にコンデンサー24の一端が接続され、コンデンサー24の他端はダイオード22のアノード端子および直流電源装置80の負電圧側に接続されている。スイッチ素子21の制御端子には、後述する制御部40から電流制御信号が入力されてスイッチ素子21のON/OFFが制御される。電流制御信号には、例えば、PWM(Pulse Width Modulation)制御信号が用いられてもよい。
スイッチ素子21がONすると、コイル23に電流が流れ、コイル23にエネルギーが蓄えられる。その後、スイッチ素子21がOFFすると、コイル23に蓄えられたエネルギーがコンデンサー24とダイオード22とを通る経路で放出される。その結果、スイッチ素子21がONする時間の割合に応じた直流電流Idが発生する。
極性反転回路30は、電力制御回路20から入力される直流電流Idを所定のタイミングで極性反転させる。これにより、極性反転回路30は、制御された時間だけ継続する直流である駆動電流I、もしくは、任意の周波数を持つ交流である駆動電流Iを生成し、出力する。本実施形態において、極性反転回路30は、インバーターブリッジ回路(フルブリッジ回路)で構成されている。
極性反転回路30は、例えば、トランジスターなどで構成される第1のスイッチ素子31、第2のスイッチ素子32、第3のスイッチ素子33、および第4のスイッチ素子34を含んでいる。極性反転回路30は、直列接続された第1のスイッチ素子31および第2のスイッチ素子32と、直列接続された第3のスイッチ素子33および第4のスイッチ素子34と、が互いに並列接続された構成を有する。第1のスイッチ素子31、第2のスイッチ素子32、第3のスイッチ素子33、および第4のスイッチ素子34の制御端子には、それぞれ制御部40から極性反転制御信号が入力される。この極性反転制御信号に基づいて、第1のスイッチ素子31、第2のスイッチ素子32、第3のスイッチ素子33および第4のスイッチ素子34のON/OFF動作が制御される。
極性反転回路30においては、第1のスイッチ素子31および第4のスイッチ素子34と、第2のスイッチ素子32および第3のスイッチ素子33と、を交互にON/OFFさせる動作が繰り返される。これにより、電力制御回路20から出力される直流電流Idの極性が交互に反転する。極性反転回路30は、第1のスイッチ素子31と第2のスイッチ素子32との共通接続点、および第3のスイッチ素子33と第4のスイッチ素子34との共通接続点から、制御された時間だけ同一極性状態を継続する直流である駆動電流I、もしくは制御された周波数をもつ交流である駆動電流Iを生成し、出力する。
すなわち、極性反転回路30は、第1のスイッチ素子31および第4のスイッチ素子34がONのときには第2のスイッチ素子32および第3のスイッチ素子33がOFFであり、第1のスイッチ素子31および第4のスイッチ素子34がOFFのときには第2のスイッチ素子32および第3のスイッチ素子33がONであるように制御される。したがって、第1のスイッチ素子31および第4のスイッチ素子34がONのときには、コンデンサー24の一端から第1のスイッチ素子31、放電灯90、第4のスイッチ素子34の順に流れる駆動電流Iが発生する。第2のスイッチ素子32および第3のスイッチ素子33がONのときには、コンデンサー24の一端から第3のスイッチ素子33、放電灯90、第2のスイッチ素子32の順に流れる駆動電流Iが発生する。
本実施形態において、電力制御回路20と極性反転回路30とを合わせた部分が放電灯駆動部230に対応する。すなわち、放電灯駆動部230は、放電灯90を駆動する駆動電流Iを放電灯90に供給する。
制御部40は、放電灯駆動部230を制御する。図4の例では、制御部40は、電力制御回路20および極性反転回路30を制御することにより、駆動電流Iが同一極性を継続する保持時間、駆動電流Iの電流値(駆動電力Wdの電力値)、周波数等のパラメーターを制御する。制御部40は、極性反転回路30に対して、駆動電流Iの極性反転タイミングにより、駆動電流Iが同一極性で継続する保持時間、駆動電流Iの周波数等を制御する極性反転制御を行う。制御部40は、電力制御回路20に対して、出力される直流電流Idの電流値を制御する電流制御を行う。
本実施形態において制御部40は、例えば、交流駆動と、直流駆動と、を実行可能である。交流駆動は、放電灯90に交流電流が供給される駆動である。直流駆動は、放電灯90に直流電流が供給される駆動である。各放電灯駆動によって放電灯90に供給される駆動電流Iの駆動電流波形については、後段において詳述する。
制御部40の構成は、特に限定されない。本実施形態においては、制御部40は、システムコントローラー41、電力制御回路コントローラー42、および極性反転回路コントローラー43を含んで構成されている。なお、制御部40は、その一部または全てを半導体集積回路で構成してもよい。
システムコントローラー41は、電力制御回路コントローラー42および極性反転回路コントローラー43を制御することにより、電力制御回路20および極性反転回路30を制御する。システムコントローラー41は、動作検出部60が検出したランプ電圧(電極間電圧)Vlaおよび駆動電流Iに基づき、電力制御回路コントローラー42および極性反転回路コントローラー43を制御してもよい。
本実施形態においては、システムコントローラー41には、記憶部44が接続されている。
システムコントローラー41は、記憶部44に格納された情報に基づき、電力制御回路20および極性反転回路30を制御してもよい。記憶部44には、駆動電流Iの複数の駆動パターンDWが格納されている。より具体的には、記憶部44には、例えば、各駆動パターンDWを構成する各駆動に関する、駆動が実行される時間の長さ、駆動電流Iの電流値、周波数、周期数、極性、波形、変調パターン等の駆動パラメーターに関する情報が格納されている。駆動電流Iの各駆動パターンDWは、上述した交流駆動と直流駆動とのうち少なくとも一方を含んでいる。駆動パターンDWの詳細については、後段において詳述する。
電力制御回路コントローラー42は、システムコントローラー41からの制御信号に基づき、電力制御回路20へ電流制御信号を出力することにより、電力制御回路20を制御する。
極性反転回路コントローラー43は、システムコントローラー41からの制御信号に基づき、極性反転回路30へ極性反転制御信号を出力することにより、極性反転回路30を制御する。
制御部40は、機械学習に基づいて放電灯駆動部230を制御する機械学習制御MLCと、機械学習によらず、定められた所定の駆動パターンDWに基づいて放電灯駆動部230を制御する非機械学習制御NMLCと、を実行可能である。すなわち、制御部40は、機械学習を行う。制御部40は、機械学習に基づいて、記憶部44に格納された複数の駆動パターンDWのうちいずれか1つの駆動パターンDWを選択し、選択された駆動パターンDWを実行する。機械学習の詳細については、後段において詳述する。本実施形態において非機械学習制御NMLCは、第1電圧増加制御VIC1および第2電圧増加制御VIC2と、ちらつき抑制制御FRCと、高負荷駆動制御HLCと、強制入力制御CICと、を含む。各制御についての詳細は、後段において詳述する。
制御部40は、専用回路を用いて実現され、上述した制御や後述する処理の各種制御を行うようにすることができる。これに対して、制御部40は、例えば、CPUが記憶部44に記憶された制御プログラムを実行することによりコンピューターとして機能し、これらの処理の各種制御を行うようにすることもできる。
図5は、制御部40の他の構成例について説明するための図である。図5に示すように、制御部40は、制御プログラムにより、電力制御回路20を制御する電流制御手段40−1、極性反転回路30を制御する極性反転制御手段40−2として機能するように構成されてもよい。
図4に示した例では、制御部40は、放電灯点灯装置10の一部として構成されている。これに対して、制御部40の機能の一部をCPU580が担うように構成されていてもよい。
動作検出部60は、本実施形態においては、放電灯90のランプ電圧Vlaを検出して制御部40にランプ電圧情報を出力する電圧検出部を含む。また、動作検出部60は、駆動電流Iを検出して制御部40に駆動電流情報を出力する電流検出部などを含んでいてもよい。本実施形態においては、動作検出部60は、第1の抵抗61、第2の抵抗62および第3の抵抗63を含んで構成されている。
本実施形態において、動作検出部60の電圧検出部は、放電灯90と並列に、互いに直列接続された第1の抵抗61および第2の抵抗62で分圧した電圧によりランプ電圧Vlaを検出する。また、本実施形態において、電流検出部は、放電灯90に直列に接続された第3の抵抗63に発生する電圧により駆動電流Iを検出する。
イグナイター回路70は、放電灯90の点灯開始時にのみ動作する。イグナイター回路70は、放電灯90の点灯開始時に放電灯90の電極間(第1電極92と第2電極93との間)を絶縁破壊して放電路を形成するために必要な高電圧(放電灯90の通常点灯時よりも高い電圧)を、放電灯90の電極間(第1電極92と第2電極93との間)に供給する。本実施形態においては、イグナイター回路70は、放電灯90と並列に接続されている。
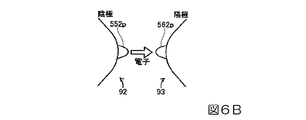
図6Aおよび図6Bには、第1電極92および第2電極93の先端部分が示されている。第1電極92および第2電極93の先端にはそれぞれ突起552p,562pが形成されている。図6Aは、第1電極92が陽極として動作し、第2電極93が陰極として動作する第1極性状態を示している。第1極性状態では、放電により、第2電極93(陰極)から第1電極92(陽極)へ電子が移動する。陰極(第2電極93)からは電子が放出される。陰極(第2電極93)から放出された電子は陽極(第1電極92)の先端に衝突する。この衝突によって熱が生じ、陽極(第1電極92)の先端(突起552p)の温度が上昇する。
図6Bは、第1電極92が陰極として動作し、第2電極93が陽極として動作する第2極性状態を示している。第2極性状態では、第1極性状態とは逆に、第1電極92から第2電極93へ電子が移動する。その結果、第2電極93の先端(突起562p)の温度が上昇する。
このように、放電灯90に駆動電流Iが供給されることで、電子が衝突する陽極の温度は上昇する。一方、電子を放出する陰極は、陽極に向けて電子を放出している間、温度は低下する。
第1電極92と第2電極93との電極間距離は、突起552p,562pの劣化とともに大きくなる。突起552p,562pが損耗するためである。電極間距離が大きくなると、第1電極92と第2電極93との間の抵抗が大きくなるため、ランプ電圧Vlaが大きくなる。したがって、ランプ電圧Vlaを参照することによって、電極間距離の変化、すなわち、放電灯90の劣化度合いを検出することができる。
なお、第1電極92と第2電極93とは、同様の構成であるため、以下の説明においては、代表して第1電極92についてのみ説明する場合がある。また、第1電極92の先端の突起552pと第2電極93の先端の突起562pとは、同様の構成であるため、以下の説明においては、代表して突起552pについてのみ説明する場合がある。
図1に示す入力部45は、使用者による所定の入力を受け付ける部分である。入力部45は、例えば、プロジェクター500の電源のON/OFF、点灯モードの変更等の使用者による入力を受け付ける。本実施形態において入力部45は、放電灯点灯装置10の制御部40に接続されている。使用者から入力を受け付けた場合、入力部45は、制御部40に、入力に応じた信号を出力する。入力部45が受け付ける入力については、後段において詳述する。
入力部45が入力を受け付ける方法は、特に限定されない。入力部45は、例えば、プロジェクター500の筐体に取り付けられた各種ボタンが押されること、または、プロジェクター500の筐体に取り付けられたディスプレイ上に表示されるメニューが操作されることによって入力を受け付けてもよいし、プロジェクター500のリモートコントローラーから送られる信号によって入力を受け付けてもよい。さらには、入力部45は、例えば、プロジェクター500に有線または無線で接続されるPC(Personal Computer)、携帯電話、タブレット等の図示しない電子端末における操作によって入力を受け付けてもよい。
以下、本実施形態の制御部40による放電灯駆動部230の制御について説明する。本実施形態において制御部40は、交流駆動および直流駆動うち少なくとも1つの駆動によって放電灯駆動部230を制御する。
まず、本実施形態の制御部40による機械学習制御MLCについて説明する。機械学習制御MLCは、後述する所定の条件がいずれも満たされない場合に実行される。機械学習制御MLCにおいては、複数の駆動パターンDWのうち機械学習駆動パターン(第1駆動パターン)DW1が実行される。すなわち、制御部40は、所定の条件が満たされない場合、機械学習駆動パターンDW1を実行する。機械学習駆動パターンDW1は、複数設けられている。各機械学習駆動パターンDW1は、駆動パターンDWを構成する各駆動における駆動パラメーターのうち少なくとも1つが互いに異なる同様の駆動電流波形を有する。
以下、各駆動について説明する。図7は、交流駆動において放電灯90に供給される駆動電流波形の一例を示す図である。図8Aおよび図8Bは、直流駆動において放電灯90に供給される駆動電流波形の一例を示す図である。図7、図8Aおよび図8Bにおいて、縦軸は駆動電流Iを示しており、横軸は時間Tを示している。駆動電流Iは、第1極性状態である場合を正とし、第2極性状態となる場合を負として示している。
図7に示す交流駆動において放電灯90に供給される駆動電流Iは、例えば、電流値Imと電流値−Imとの間で極性が複数回反転される矩形波交流電流である。図7に示す交流電流において、周期C1の長さは、一定である。図7に示す交流電流のデューティー比は、0.5(50%)である。
図8Aに示す直流駆動において放電灯90に供給される駆動電流Iは、一定の電流値Imを有する第1極性の直流電流である。図8Bに示す直流駆動において放電灯90に供給される駆動電流Iは、一定の電流値−Imを有する第2極性の直流電流である。
図9は、本実施形態において、放電灯90に供給される駆動電流Iの機械学習駆動パターンDW1の一例を示す図である。図9において縦軸は駆動電流Iを示しており、横軸は時間Tを示している。
図9に示される機械学習駆動パターンDW1は、交流駆動および直流駆動から構成される。より具体的には、図9の機械学習駆動パターンDW1は、第1交流駆動AC1、第1直流駆動DC1、第2交流駆動AC2、および第2直流駆動DC2から構成される。第1交流駆動AC1が実行される期間、および第2交流駆動AC2が実行される期間は、交流電流が放電灯90に供給される第1期間である。第1直流駆動DC1が実行される期間、および第2直流駆動DC2が実行される期間は、直流電流が放電灯90に供給される第2期間である。すなわち、図9の機械学習駆動パターンDW1は、第1期間と第2期間とが交互に繰り返される混合期間を有する。
このように、制御部40は、後述する所定の条件が満たされない場合に、混合期間が設けられるように放電灯駆動部230を制御する。換言すると、制御部40は、後述する所定の条件が満たされない場合に、混合期間を含む機械学習駆動パターン(第1駆動パターン)DW1が設けられるように放電灯駆動部230を制御する。混合期間における第1期間の数と第2期間の数とは、特に限定されない。
そして、この機械学習駆動パターンDW1は、各交流駆動および各直流駆動に関して複数の駆動パラメーターを有する。例えば、第1交流駆動AC1は、駆動パラメーターとして、交流駆動の実行時間の長さta1および交流電流の第1周波数f1を有する。第1直流駆動DC1は、駆動パラメーターとして、直流駆動の実行時間の長さtd1および第1極性を有する。第2交流駆動AC2は、駆動パラメーターとして、交流駆動の実行時間の長さta2および交流電流の第2周波数f2を有する。第2直流駆動DC2は、駆動パラメーターとして、直流駆動の実行時間の長さtd2および第2極性を有する。
なお、図9の機械学習駆動パターンDW1の場合、第1交流駆動AC1の実行時間の長さta1および第2交流駆動AC2の実行時間の長さta2は、同じとしており、また、第1交流駆動AC1の実行時間の長さta1および第2交流駆動AC2の実行時間の長さta2も、同じとしている。さらに、図9の機械学習駆動パターンDW1の場合、第1交流駆動AC1における交流電流の第1周波数f1および第2交流駆動AC2における交流電流の第2周波数f2は、同じとしている。
第1周波数f1および第2周波数f2は、例えば、100Hz以上、1kHz以下である。第1交流駆動AC1の実行時間の長さta1および第2交流駆動AC2の実行時間の長さta2は、例えば、10ms(ミリ秒)以上、10s(秒)以下である。第1直流駆動DC1の実行時間の長さtd1および第2直流駆動DC2の実行時間の長さtd2は、例えば、10ms(ミリ秒)以上、40ms(ミリ秒)以下である。
複数の機械学習駆動パターンDW1は、例えば、上記各駆動における各駆動パラメーターの数値範囲のうちから選択された複数の数値が適宜組み合わされて構成される。例えば、組み合わせとして用いる各駆動における駆動パラメーターの種類の合計は、2種類以上、6種類以下が好ましく、駆動パラメーターの種類ごとに用意する数値は、2つ以上、6つ以下が好ましい。これらを組み合わせて複数の機械学習駆動パターンDW1を構成することで、好ましい数の機械学習駆動パターンDW1が得られる。
例えば、前述の図9に示される機械学習駆動パターンDW1で説明された駆動パラメーターは、交流駆動の実行時間の長さ、交流駆動における交流電流の周波数、直流駆動の実行時間の長さ、および直流駆動の極性であり、この場合、各駆動における駆動パラメーターの種類の合計は、4種類である。
複数の機械学習駆動パターンDW1は、上述した複数の駆動パラメーターのうちの少なくとも1つの駆動パラメーターの値が互いに異なる。機械学習駆動パターンDW1の数は、例えば、3パターン以上、150パターン以下である。好ましくは、機械学習駆動パターンDW1の数は、10パターン以上、100パターン以下である。より好ましくは、機械学習駆動パターンDW1数は、20パターン以上、30パターン以下である。このように機械学習駆動パターンDW1の数を設定することで、放電灯90の寿命をより向上できる。
次に、本実施形態の制御部40による各駆動パターンDWの切り換えについて説明する。制御部40は、機械学習に基づいて、機械学習駆動パターンDW1を切り換える。本実施形態において制御部40は、ランプ電圧Vlaの変化に基づいて機械学習駆動パターンDW1の評価を行い、この機械学習駆動パターンDW1の評価に基づいて、機械学習駆動パターンDW1の選択を行う。
本実施形態においては、複数の機械学習駆動パターンDW1の初期評価が行われる初期学習期間と、初期学習期間の後に設けられる定常学習期間と、が設けられる。図10は、初期学習期間における制御部40の制御手順の一例を示すフローチャートである。なお、以下の説明においては、機械学習駆動パターンDW1は、N個設けられ、各機械学習駆動パターンDW1には、それぞれ1番〜N番までの番号が振られているとする。
図10に示すように、制御部40は、初期学習期間を開始した(ステップS11)後、1番〜N番までの機械学習駆動パターンDW1のうちから、初期学習期間において選択していない機械学習駆動パターンDW1を選択する(ステップS12)。制御部40は、例えば、選択していない機械学習駆動パターンDW1をランダムで選択する。初期学習期間を開始した直後においては、いずれの機械学習駆動パターンDW1も選択していないため、制御部40は、1番〜N番までの機械学習駆動パターンDW1のうちから1つの機械学習駆動パターンDW1を選択する。次に、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vla1を検出し(ステップS13)、制御部40は、検出されたランプ電圧Vla1を記憶部44に記憶する。そして、制御部40は、選択された機械学習駆動パターンDW1を実行する(ステップS14)。
機械学習駆動パターンDW1の実行を開始した後、制御部40は、現在選択されている機械学習駆動パターンDW1の実行が開始されてから初期学習時間が経過したか否かを判断する(ステップS15)。初期学習時間の長さは、例えば、10min(分)以上、120min(分)以下である。現在選択されている機械学習駆動パターンDW1の実行が開始されてから初期学習時間が経過していない場合(ステップS15:NO)、制御部40は、現在選択されている機械学習駆動パターンDW1を実行し続ける。
一方、現在選択されている機械学習駆動パターンDW1の実行が開始されてから初期学習時間が経過した場合(ステップS15:YES)、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vla2を検出し(ステップS16)、制御部40は、検出されたランプ電圧Vla2を記憶部44に記憶する。そして、制御部40は、現在選択されている機械学習駆動パターンDW1を評価する(ステップS17)。
本実施形態において機械学習駆動パターンDW1の評価は、ランプ電圧Vlaの変化に基づいて行われる。具体的には、制御部40は、選択された機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2の値と、選択された機械学習駆動パターンDW1を実行する前のランプ電圧Vla1に対する、機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2の差と、に基づいて、機械学習駆動パターンDW1を評価する。以下の説明においては、機械学習駆動パターンDW1を実行する前のランプ電圧Vla1に対する、機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2の差を、第1変動電圧値と呼ぶ。
ここで、ランプ電圧Vlaには、目標数値範囲が設定されている。制御部40は、可能な限りランプ電圧Vlaを目標数値範囲に維持できるように、各機械学習駆動パターンDW1の選択・実行を行う。目標数値範囲は、例えば、放電灯90に供給される駆動電力Wdの値に応じて決められる。目標数値範囲の数値は、駆動電力Wdが定格電力よりも低い場合、駆動電力Wdが定格電力である場合に比べて、小さい。駆動電力Wdが定格電力(例えば、215W)の場合、目標数値範囲は、例えば、60V以上、65V未満である。駆動電力Wdが定格電力よりも低い(例えば、140W)場合、目標数値範囲は、例えば、53V以上、59V未満である。このように目標数値範囲を設定することで、駆動電力Wdに応じて好適にランプ電圧Vlaを維持しやすく、放電灯90の寿命を向上できる。
機械学習駆動パターンDW1の評価が比較的高くなる場合は、例えば、1つの機械学習駆動パターンDW1を実行したことでランプ電圧Vla(1つの機械学習駆動パターンDW1が初期学習時間実行された後のランプ電圧Vla2)が目標数値範囲内となった場合、1つの機械学習駆動パターンDW1を実行したことでランプ電圧Vlaが目標数値範囲に近づいた場合、および1つの機械学習駆動パターンDW1を実行する前後でランプ電圧Vlaを目標数値範囲内に維持できた場合等である。また、機械学習駆動パターンDW1の評価が比較的低い場合は、例えば、1つの機械学習駆動パターンDW1を実行したことでランプ電圧Vlaが目標数値範囲から外れた場合、および1つの機械学習駆動パターンDW1を実行したことでランプ電圧Vlaが目標数値範囲から遠ざかった場合等である。
一例として、1つの機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2が目標数値範囲よりも大きい場合、かつ、第1変動電圧値が負の値である場合、選択された1つの機械学習駆動パターンDW1の評価は比較的高い。また、1つの機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2が目標数値範囲よりも大きい場合、かつ、第1変動電圧値が正の値である場合、選択された1つの機械学習駆動パターンDW1の評価は比較的低い。一方、1つの機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2が目標数値範囲よりも小さい場合、かつ、第1変動電圧値が負の値である場合、選択された1つの機械学習駆動パターンDW1の評価は比較的低い。また、1つの機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2が目標数値範囲よりも小さい場合、かつ、第1変動電圧値が正の値である場合、選択された1つの機械学習駆動パターンDW1の評価は比較的高い。さらに、1つの機械学習駆動パターンDW1を初期学習時間実行した後のランプ電圧Vla2が目標数値範囲内である場合には、第1変動電圧値の絶対値が小さいほど、選択された1つの機械学習駆動パターンDW1の評価は比較的高く、一方で、第1変動電圧値の絶対値が大きいほど、選択された1つの機械学習駆動パターンDW1の評価は比較的低い。
なお、第1変動電圧値が負の値であるとは、1つの機械学習駆動パターンDW1を初期学習時間実行したことでランプ電圧Vlaが低下したことを意味する。第1変動電圧値が正の値であるとは、1つの機械学習駆動パターンDW1を初期学習時間実行したことでランプ電圧Vlaが上昇したことを意味する。
選択されている機械学習駆動パターンDW1を評価した後、制御部40は、初期学習期間において1番〜N番までの機械学習駆動パターンDW1を全て実行したか否かを判断する(ステップS18)。1番〜N番までの機械学習駆動パターンDW1のうちで初期学習期間において実行していない機械学習駆動パターンDW1がある場合(ステップS18:NO)、制御部40は、別の機械学習駆動パターンDW1を選択して実行し、評価する(ステップS12〜S17)。一方で、初期学習期間において1番〜N番までのNパターンの機械学習駆動パターンDW1を全て実行した場合(ステップS18:YES)、制御部40は、初期学習期間を終了して、定常学習期間に移行する(ステップS19)。初期学習期間の長さは、例えば、10h(時間)未満である。
本実施形態において、選択された機械学習駆動パターンDW1を実行する前のランプ電圧Vla1として、ステップS12において複数の機械学習駆動パターンDW1のうちから選択していない機械学習駆動パターンDW1を選択した後に、動作検出部60の電圧検出部によって放電灯90のランプ電圧Vlaを検出することとしたが、これに限られない。選択されたX番目の機械学習駆動パターンDW1を実行する前のランプ電圧Vla1は、例えば、選択されたX番目の機械学習駆動パターンDW1の1つ前に選択された(X−1)番目の機械学習駆動パターンDW1が初期学習時間実行された後に検出されたランプ電圧Vla2としてもよい。このように制御することで、ステップS13におけるランプ電圧Vla1の検出が不要となり、初期評価の処理をより簡略化できる。
図11は、定常学習期間における制御部40の制御手順の一例を示すフローチャートである。図11では、定常学習期間における1サイクルを示している。定常学習期間において制御部40は、図11に示すような1サイクルを繰り返し実行する。図11に示すように、制御部40は、定常学習期間を開始した(ステップS21)後、1番〜N番までの機械学習駆動パターンDW1の中から、定常学習期間において選択されていない機械学習駆動パターンDW1と比較的評価の高い機械学習駆動パターンDW1とのうち一方の機械学習駆動パターンDW1を選択する(ステップS22〜S24)。なお、制御部40は、例えば、1番〜N番までの機械学習駆動パターンDW1の中から機械学習駆動パターンDW1をランダムで選択する。
より具体的には、例えば、制御部40は、1番〜N番までの機械学習駆動パターンDW1の中から、定常学習期間において選択されていない機械学習駆動パターンDW1と比較的評価の高い機械学習駆動パターンDW1とのうち前者(定常学習期間において選択されていない機械学習駆動パターンDW1)を選択するか否かを判断し(ステップS22)、比較的評価の高い機械学習駆動パターンDW1を選択する場合(ステップS22:NO)、1番〜N番までの機械学習駆動パターンDW1の中から比較的評価の高い機械学習駆動パターンDW1を選択する(ステップS23)。制御部40は、例えば、1番〜N番までの機械学習駆動パターンDW1のうち、評価が最も高い機械学習駆動パターンDW1、すなわち、ランプ電圧Vlaをランプ電圧Vlaの目標数値範囲に最も近付ける機械学習駆動パターンDW1を選択する。そして、制御部40は、ステップS23において選択された機械学習駆動パターンDW1を実行する(ステップS26)。
一方で、制御部40は、定常学習期間において選択されていない機械学習駆動パターンDW1である前者を選択する場合(ステップS22:YES)、1番〜N番までの機械学習駆動パターンDW1の中から定常学習期間において選択されていない機械学習駆動パターンDW1を選択する(ステップS24)。そして、定常学習期間において選択されていない機械学習駆動パターンDW1が選択された場合、制御部40は、選択された機械学習駆動パターンDW1が実行条件を満たすか否かを判断する(ステップS25)。実行条件は、例えば、選択された機械学習駆動パターンDW1が前回選択され実行された際に、後述するステップS28において他の機械学習駆動パターンDW1へ切り換えられていないことを含む。
ステップS24において選択された機械学習駆動パターンDW1が実行条件を満たす場合(ステップS25:YES)、ステップS26に移行し、制御部40は、選択された機械学習駆動パターンDW1を実行する。一方、選択された機械学習駆動パターンDW1が実行条件を満たさない場合(ステップS25:NO)、ステップS22に移行し、制御部40は、1番〜N番までの機械学習駆動パターンDW1の中から他の機械学習駆動パターンDW1を選択し、上述したのと同様の判断を行う。
次に、選択された機械学習駆動パターンDW1の実行を開始した後、制御部40は、現在選択されている機械学習駆動パターンDW1の実行を開始してから定常学習時間が経過したか否かを判断する(ステップS27)。ステップS27において判断する定常学習時間は、例えば、初期学習期間におけるステップS15で判断する初期学習時間と同じである。すなわち、定常学習時間の長さは、例えば、10min(分)以上、120min(分)以下である。現在選択されている機械学習駆動パターンDW1の実行が開始されてから定常学習時間が経過していない場合(ステップS27:NO)、制御部40は、現在の機械学習駆動パターンDW1が切換条件を満たすか否かを判断する(ステップS28)。
切換条件は、例えば、第1切換条件と、第2切換条件とのいずれか1つを満たすことを含む。第1切換条件は、現在の機械学習駆動パターンDW1の実行中に、定常学習時間内で検出されたランプ電圧Vlaの変化(変動電圧値)の絶対値が第1所定値以上となり、かつ、検出されたランプ電圧Vlaが目標数値範囲から外れることである。第2切換条件は、現在の機械学習駆動パターンDW1の実行が開始してから経過した時間が第1時間以下の場合に、ランプ電圧Vlaの変化の絶対値が第2所定値以上となることを含む。第1時間は、定常学習時間よりも小さく、例えば、5min(分)である。第2所定値は、第1所定値よりも小さい。第1所定値は、例えば、5Vである。第2所定値は、例えば、3Vである。
すなわち、第1時間以下においてはランプ電圧Vlaの変化の絶対値が第1所定値よりも小さい第2所定値以上となった場合でも切換条件(第2切換条件)を満たすこととし、第1時間を超えた場合においてはランプ電圧Vlaの変化が第2所定値よりも大きい第1所定値以上とならなければ切換条件(第1切換条件)を満たさないこととする。このような関係とすることで、制御部40は、現在選択されている機械学習駆動パターンDW1の実行時間とランプ電圧Vlaとに基づいて、現在選択されている機械学習駆動パターンDW1の切換を段階的に判断する。
現在選択されている機械学習駆動パターンDW1が切換条件を満たす場合(ステップS28:YES)、制御部40は、現在の放電灯90の状態においては、現在選択されている機械学習駆動パターンDW1が放電灯90の寿命を向上させるために好ましくない機械学習駆動パターンDW1であると判断する。そして、制御部40は、現在選択されている機械学習駆動パターンDW1の評価を下げる。
その後、制御部40は、上述したのと同様にして、ステップS22〜ステップS26を実行し、次の機械学習駆動パターンDW1の選択・実行を行う。このように、制御部40は、機械学習駆動パターンDW1実行時において、ランプ電圧Vlaの変化が切換条件を満たす場合、現在選択されている機械学習駆動パターンDW1から他の機械学習駆動パターンDW1に切り換える。
一方で、現在の機械学習駆動パターンDW1が切換条件を満たさない場合(ステップS28:NO)、制御部40は、定常学習時間が経過するまで現在選択されている機械学習駆動パターンDW1を実行する。そして、現在の機械学習駆動パターンDW1の実行を開始してから定常学習時間が経過した場合(ステップS27:YES)、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vlaを検出し(ステップS29)、制御部40は、検出されたランプ電圧Vlaを記憶部44に記憶する。その後、制御部40は、現在選択されている機械学習駆動パターンDW1を評価する(ステップS30)。
ステップS30における機械学習駆動パターンDW1の評価は、例えば、初期学習期間のステップS17における機械学習駆動パターンDW1の評価と同様である。すなわち、制御部40は、選択された機械学習駆動パターンDW1を定常学習時間実行した後のランプ電圧Vlaの値と、選択された機械学習駆動パターンDW1を実行する前のランプ電圧Vlaに対する機械学習駆動パターンDW1を定常学習時間実行した後のランプ電圧Vlaの差と、に基づいて、機械学習駆動パターンDW1を評価する。以下の説明においては、機械学習駆動パターンDW1を実行する前のランプ電圧Vlaに対する機械学習駆動パターンDW1を定常学習時間実行した後のランプ電圧Vlaの差を、第2変動電圧値と呼ぶ。
ステップS30において制御部40は、定常学習期間において選択された機械学習駆動パターンDW1の再評価を行う。すなわち、制御部40は、各機械学習駆動パターンDW1に対し、初期学習期間において行われた評価、および現時点よりも前の定常学習期間において行われた評価を更新する。
続いて、制御部40は、現在選択されている機械学習駆動パターンDW1が連続実行条件を満たすか否か判断する(ステップS31)。連続実行条件は、第1連続実行条件と、第2連続実行条件と、第3連続実行条件とのいずれか1つを満たすことを含む。第1連続実行条件、第2連続実行条件、および第3連続実行条件の各々は、連続実行回数が所定回数以下であることを含む。連続実行回数に関する所定回数は、例えば、2回以上、15回以下である。
そして、第1連続実行条件は、選択された機械学習駆動パターンDW1を定常学習時間実行した後のランプ電圧Vlaが目標数値範囲よりも大きく、かつ、第2変動電圧値が負の値であることである。第2連続実行条件は、選択された機械学習駆動パターンDW1の実行前後でランプ電圧Vlaが目標数値範囲内に含まれていることである。第3連続実行条件は、選択された機械学習駆動パターンDW1を定常学習時間実行した後のランプ電圧Vlaが目標数値範囲よりも小さく、かつ、第2変動電圧値が正の値であることである。
現在の機械学習駆動パターンDW1が連続実行条件を満たす場合(ステップS31:YES)、制御部40は、現在の放電灯90の状態においては、現在選択されている機械学習駆動パターンDW1が放電灯90の寿命を向上させるために好ましい機械学習駆動パターンDW1であると判断する。そして、制御部40は、現在選択されている機械学習駆動パターンDW1を、次に実行する機械学習駆動パターンDW1として再び選択する(ステップS32)。そして、ステップS26へ移行し、制御部40は、今回実行する機械学習駆動パターンDW1として選択された前回の機械学習駆動パターンDW1を連続して実行する。
以上に説明したように、本実施形態において制御部40は、選択された1つの機械学習駆動パターンDW1を定常学習時間実行した前後のランプ電圧Vlaの変化が連続実行条件を満たす場合、同じ機械学習駆動パターンDW1を複数回連続して実行する。
一方で、現在の機械学習駆動パターンDW1が連続実行条件を満たさない場合(ステップS31:NO)、制御部40は、ステップS22〜S26において機械学習駆動パターンDW1の選択および実行を所定回数実行したか否かを判断する(ステップS33)。
機械学習駆動パターンDW1の選択および実行を所定回数実行していない場合(ステップS33:NO)、ステップS22へ移行して、再び機械学習駆動パターンDW1の選択を行う。1サイクルの定常学習期間における機械学習駆動パターンDW1の選択および実行に関する所定回数は、例えば、機械学習駆動パターンDW1の個数Nよりも大きい。
機械学習駆動パターンDW1の選択および実行を所定回数実行した場合(ステップS33:YES)、制御部40は、定常学習期間の1サイクルを終了する(ステップS34)。制御部40は、以上のような1サイクルを繰り返して、定常学習期間を実行し続ける。次の1サイクルは、機械学習駆動パターンDW1の選択および実行の回数がリセットされること以外は、定常学習期間の前回のサイクルから各パラメーターを引き継いだ状態で実行される。
以上のようにして、制御部40は、初期学習期間と定常学習期間とによって機械学習を行い、実行する機械学習駆動パターンDW1を選択する。初期学習期間は、例えば、プロジェクター500が初めて点灯された後に1回のみ行われる。定常学習期間は、例えば、初期学習期間が終了した後、プロジェクター500が点灯している間、常時設けられる。例えば、プロジェクター500の電源がOFFにされた後、再びONにされた際には、制御部40は、前回電源がOFFにされた際に実行していた期間を、中断されたところから再開する。
機械学習駆動パターンDW1の駆動電流波形は、特に限定されず、図9に示す駆動電流波形と異なる駆動電流波形であってもよい。例えば、機械学習駆動パターンDW1の駆動電流波形は、図12A、図12Bおよび図13に示す駆動電流波形を含んでもよい。図12A、図12Bおよび図13は、交流駆動において放電灯90に供給される駆動電流波形の他の一例を示す図である。図12A、図12Bおよび図13において、縦軸は駆動電流Iを示しており、横軸は時間Tを示している。駆動電流Iは、第1極性状態である場合を正とし、第2極性状態となる場合を負として示している。
図12Aおよび図12Bに示す交流駆動は、デューティー比が0.5(50%)よりも小さい片寄駆動である。図12Aおよび図12Bに示す片寄駆動において放電灯90に供給される駆動電流Iは、例えば、電流値Imと電流値−Imとの間で極性が複数回反転される矩形波交流電流である。
図12Aに示す片寄駆動において、周期C2の長さは、一定である。周期C2においては、第1極性状態となる第1極性期間C21と、第2極性状態となる第2極性期間C22と、が設けられる。第1極性期間C21の長さは、第2極性期間C22の長さよりも小さい。すなわち、図12Aに示す片寄駆動は、駆動パラメーターとして、周期数、周期C2の長さ、デューティー比、第1極性期間C21の長さ、および第2極性期間C22の長さを有する。
図12Bに示す片寄駆動において、周期の長さは、変化する。図12Bの例では、第1周期C3と、第2周期C4と、第3周期C5と、が設けられる。第1周期C3の長さは、第2周期C4の長さよりも大きい。第3周期C5の長さは、第1周期C3の長さよりも大きい。
第1周期C3においては、第1極性状態となる第1極性期間C31と、第2極性状態となる第2極性期間C32と、が設けられる。第2極性期間C32の長さは、第1極性期間C31の長さよりも小さい。第2周期C4においては、第1極性状態となる第1極性期間C41と、第2極性状態となる第2極性期間C42と、が設けられる。第2極性期間C42の長さは、第1極性期間C41の長さよりも小さい。第3周期C5においては、第1極性状態となる第1極性期間C51と、第2極性状態となる第2極性期間C52と、が設けられる。第2極性期間C52の長さは、第1極性期間C51の長さよりも小さい。
第1極性期間C31の長さは、第1極性期間C51の長さよりも大きい。第1極性期間C41の長さは、第1極性期間C31の長さよりも大きい。第2極性期間C32の長さと第2極性期間C42の長さと第2極性期間C52の長さとは、互いに同じである。第1極性期間(第1直流期間)C31,C41,C51の長さは、例えば、5.0ms(ミリ秒)以上、20ms(ミリ秒)以下である。第2極性期間(第2直流期間)C32,C42,C52の長さは、0.5ms(ミリ秒)よりも小さい。
すなわち、図12Bに示す片寄駆動は、駆動パラメーターとして、図12Aの片寄駆動と同様に、周期数、各周期の長さ、各デューティー比、各第1極性期間の長さ、および各第2極性期間の長さを有する。
図13に示す交流駆動は、各極性状態において駆動電流Iの絶対値が大きくなる跳上駆動である。図13に示す跳上駆動において放電灯90に供給される駆動電流Iは、例えば、電流値がIm1,Im2,−Im1,−Im2の間で変化する矩形波交流電流である。Im2および−Im2の絶対値は、Im1および−Im1の絶対値よりも大きい。図13に示す跳上駆動において、周期C6の長さは、一定である。図13に示す交流電流のデューティー比は、0.5(50%)である。
周期C6においては、第1極性状態となる第1極性期間C61と、第2極性状態となる第2極性期間C62と、が設けられる。第1極性期間C61の長さと第2極性期間C62の長さとは、互いに同じである。第1極性期間C61は、低電流期間C61aと、高電流期間C61bと、を含む。低電流期間C61aは、駆動電流Iが電流値Im1となる期間である。高電流期間C61bは、駆動電流Iが電流値Im2となる期間である。高電流期間C61bの長さは、低電流期間C61aの長さよりも小さい。
第2極性期間C62は、低電流期間C62aと、高電流期間C62bと、を含む。低電流期間C62aは、駆動電流Iが電流値−Im1となる期間である。高電流期間C62bは、駆動電流Iが電流値−Im2となる期間である。高電流期間C62bの長さは、低電流期間C62aの長さよりも小さい。低電流期間C61aの長さと低電流期間C62aの長さとは、互いに同じである。高電流期間C61bの長さと高電流期間C62bの長さとは、互いに同じである。
すなわち、図13に示す跳上駆動は、駆動パラメーターとして、周期数、周期C6の長さ、電流値Im1および−Im1の絶対値、電流値Im2および−Im2の絶対値、第1極性期間C61の長さ、第2極性期間C62の長さ、第1極性期間C61における低電流期間C61aの長さおよび高電流期間C61bの長さ、第2極性期間C62における低電流期間C62aの長さおよび高電流期間C62bの長さ、第1極性期間C61における低電流期間C61aまたは高電流期間C61bの割合、第2極性期間C62における低電流期間C62aまたは高電流期間C62bの割合、電流値Im1および−Im1の絶対値に対する電流値Im2および−Im2の絶対値の割合等を有する。
なお、上記の説明においては、図12A、図12Bおよび図13に示す駆動を交流駆動の一例として説明したが、これに限られない。例えば、図12A、図12Bおよび図13に示す駆動を、直流駆動の一例としてみなしてもよい。この場合、直流駆動の極性、および直流駆動の実行時間の長さが適宜変化することで、各図に示す駆動電流波形が作られる。
次に、制御部40による非機械学習制御NMLCについて説明する。非機械学習制御NMLCにおいて、制御部40は、複数の駆動パターンDWのうち所定の駆動パターンDWとして非機械学習駆動パターンDW2を実行する。制御部40は、所定の条件に基づいて、機械学習制御MLCと非機械学習制御NMLCとを切り換える。制御部40は、所定の条件が満たされた場合、機械学習に基づく機械学習駆動パターンDW1を選択および実行せずに、非機械学習駆動パターンDW2を実行する。本実施形態において、非機械学習駆動パターンDW2は、複数設けられている。
まず、非機械学習制御NMLCのうち、第1電圧増加制御VIC1および第2電圧増加制御VIC2について説明する。第1電圧増加制御VIC1においては、非機械学習駆動パターンDW2のうち第1電圧増加パターンDWV1が実行される。第1電圧増加パターンDWV1は、第3交流駆動AC3を含んで構成される。第3交流駆動AC3が実行される期間は、交流電流が放電灯90に供給される低周波期間である。本実施形態において第1電圧増加パターンDWV1は、例えば、第3交流駆動AC3のみから構成される。
第3交流駆動AC3において放電灯90に供給される駆動電流波形は、第1交流駆動AC1および第2交流駆動AC2において放電灯90に供給される駆動電流波形と同様である。第3交流駆動AC3においては、第1交流駆動AC1および第2交流駆動AC2において放電灯90に供給される交流電流の第1周波数f1および第2周波数f2よりも低い周波数である第3周波数f3を有する交流電流が放電灯90に供給される。第3周波数f3の値は、例えば、30Hz以上、200Hz以下である。第3交流駆動AC3において、第3周波数f3の値は、複数の値に変化する。すなわち、低周波期間は、放電灯90に供給される交流電流の第3周波数f3が互いに異なる複数の交流期間を有する。低周波期間は、例えば、第1交流期間P1と第2交流期間P2との2つの交流期間を有する。すなわち、この場合、低周波期間は、第1交流期間P1と第2交流期間P2とを有し、第1交流期間P1において放電灯90に供給される交流電流の第3周波数f3と、第2交流期間P2において放電灯90に供給される交流電流の第3周波数f3とは、互いに異なる。
第2電圧増加制御VIC2においては、非機械学習駆動パターンDW2のうち第2電圧増加パターンDWV2が実行される。図14は、本実施形態において、放電灯90に供給される駆動電流Iの第2電圧増加パターンDWV2の一例を示す図である。図14において縦軸は駆動電流Iを示しており、横軸は時間Tを示している。図14に示すように、第2電圧増加パターンDWV2は、第3交流駆動AC3と片寄駆動BDとから構成される。片寄駆動BDが実行される期間は、第3期間である。本実施形態の第2電圧増加パターンDWV2において、例えば、第3交流駆動AC3と片寄駆動BDとは、交互に実行される。また、本実施形態の第2電圧増加パターンDWV2において、例えば、第1極性期間の第1極性および第2極性期間の第2極性は、第3期間が設けられるごとに反転する。すなわち、図14に示される第3期間の次に設けられる第3期間において、各第2極性期間の長さは、各第1極性期間の長さよりも大きくなる。このように、本実施形態において、制御部40は、後述する所定の条件が満たされた場合に、低周波期間と第3期間とを含む第2電圧増加パターンDWV2を実行する。
片寄駆動BDにおいて放電灯90に供給される電流の駆動電流波形は、図12Bにおいて示す片寄駆動において放電灯90に供給される電流の駆動電流波形と同様である。片寄駆動BDにおいては、例えば、各第1極性期間の長さは同じである。片寄駆動BDが実行される間隔(第3期間が設けられる間隔)、すなわち1回の第3交流駆動AC3の実行時間(1つの低周波期間の長さta3)は、例えば、10s(秒)以上、90s(秒)以下程度である。また、第2電圧増加パターンDWV2において、1回の片寄駆動BDの実行時間(第3期間の長さtb)は、例えば、10ms(ミリ秒)以上、1000ms(ミリ秒)以下程度である。
本実施形態において制御部40は、ランプ電圧Vlaと駆動電力Wdとに基づいて、機械学習制御MLCと、第1電圧増加制御VIC1および第2電圧増加制御VIC2と、を切り換える。図15は、機械学習制御MLCと第1電圧増加制御VIC1および第2電圧増加制御VIC2との切り換えにおける制御部40の制御手順の一例を示すフローチャートである。
図15に示すように、制御部40は、機械学習制御MLCを実行する(ステップS51)。次に、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vlaを検出する。そして、制御部40は、機械学習制御MLCの実行中に、検出されたランプ電圧Vlaが第1所定電圧値よりも小さいか否かを判断する(ステップS52)。第1所定電圧値は、例えば、上述した目標数値範囲の中央値である。すなわち、目標数値範囲が60V以上、65V未満の場合、第1所定電圧値は、例えば、63Vである。また、目標数値範囲が53V以上、59V未満の場合、第1所定電圧値は、例えば、56Vである。
ランプ電圧Vlaが第1所定電圧値以上である場合(ステップS52:NO)、制御部40は、機械学習制御MLCを継続して実行する。一方、ランプ電圧Vlaが第1所定電圧値よりも小さい場合(ステップS52:YES)、制御部40は、駆動電力Wdが所定電力値よりも大きいか否かを判断する(ステップS53)。所定電力値は、例えば、定格電力よりも小さい。所定電力値は、例えば、定格電力の8割程度の値である。
駆動電力Wdが所定電力値以下の場合(ステップS53:NO)、制御部40は、機械学習制御MLCを中止して、第1電圧増加制御VIC1を実行する(ステップS54)。すなわち、制御部40は、機械学習制御MLCから第1電圧増加制御VIC1に切り換える。一方、駆動電力Wdが所定電力値よりも大きい場合(ステップS53:YES)、制御部40は、機械学習制御MLCを中止して、第2電圧増加制御VIC2を実行する(ステップS55)。すなわち、制御部40は、機械学習制御MLCから第2電圧増加制御VIC2に切り換える。これにより、制御部40は、第1電圧増加パターンDWV1または第2電圧増加パターンDWV2を実行する。この場合、上述した機械学習制御MLCのフローチャートに関わらず、制御部40は、機械学習駆動パターンDW1の実行を強制的に終了して、第1電圧増加パターンDWV1または第2電圧増加パターンDWV2を実行する。
以上のように、制御部40は、ランプ電圧Vlaが第1所定電圧値よりも小さい場合、第1電圧増加制御VIC1または第2電圧増加制御VIC2を実行する。すなわち、制御部40は、ランプ電圧Vlaが第1所定電圧値よりも小さい場合、所定の駆動パターンDWとして低周波期間を含む駆動パターンDWを実行する。このように、本実施形態において非機械学習制御NMLCが実行される所定の条件は、ランプ電圧Vlaが第1所定電圧値よりも小さいことを含む。
また、制御部40は、ランプ電圧Vlaが第1所定電圧値よりも小さく、かつ、駆動電力Wdが所定電力値よりも大きい場合、第2電圧増加制御VIC2を実行する。すなわち、制御部40は、ランプ電圧Vlaが第1所定電圧値よりも小さく、かつ、駆動電力Wdが所定電力値よりも大きい場合、所定の駆動パターンDWとして低周波期間と第3期間とを含む駆動パターンDWを実行する。このように、本実施形態において非機械学習制御NMLCが実行される所定の条件は、ランプ電圧Vlaが第1所定電圧値よりも小さく、かつ、駆動電力Wdが所定電力値よりも大きいことを含む。
第1電圧増加制御VIC1または第2電圧増加制御VIC2の実行を開始した後、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vlaを検出する。そして、制御部40は、第1電圧増加制御VIC1または第2電圧増加制御VIC2の実行中に、検出されたランプ電圧Vlaが第2所定電圧値よりも小さいか否かを判断する(ステップS56)。第2所定電圧値は、第1所定電圧値よりも小さい。第2所定電圧値は、例えば、目標数値範囲のうちで最も小さい値である。この場合、ステップS56において制御部40は、ランプ電圧Vlaが目標数値範囲よりも小さいか否かを判断する。目標数値範囲が60V以上、65V未満の場合、第2所定電圧値は、例えば、60Vである。また、目標数値範囲が53V以上、59V未満の場合、第2所定電圧値は、例えば、53Vである。
ランプ電圧Vlaが第2所定電圧値以上の場合(ステップS56:NO)、制御部40は、第1電圧増加制御VIC1または第2電圧増加制御VIC2を実行しつつ、上述した機械学習制御MLCにおいて選択および実行された機械学習駆動パターンDW1を評価する(ステップS57)。具体的には、制御部40は、機械学習制御MLCから第1電圧増加制御VIC1または第2電圧増加制御VIC2に切り換わる直前に実行していた機械学習駆動パターンDW1を評価する。一方、ランプ電圧Vlaが第2所定電圧値よりも小さい場合(ステップS56:YES)、制御部40は、機械学習制御MLCにおいて選択および実行された機械学習駆動パターンDW1を評価しない(ステップS58)。
その後、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vlaを検出する。そして、制御部40は、第1電圧増加制御VIC1または第2電圧増加制御VIC2の実行中に、検出されたランプ電圧Vlaが第1所定電圧値よりも小さいか否かを再び判断する(ステップS59)。ランプ電圧Vlaが第1所定電圧値よりも小さい場合(ステップS59:YES)には、ステップS53に移行して、制御部40は、駆動電力Wdが所定電力値よりも大きいか否かを判断し、この結果に応じて第1電圧増加制御VIC1または第2電圧増加制御VIC2を実行する。すなわち、制御部40は、第1電圧増加制御VIC1または第2電圧増加制御VIC2の実行を継続し、駆動電力Wdが所定電力値を跨いで変化した場合には、第1電圧増加制御VIC1と第2電圧増加制御VIC2とを切り換える。一方、ランプ電圧Vlaが第1所定電圧以上の場合(ステップS59:NO)には、制御部40は、再び機械学習制御MLCを実行する(ステップS60)。
以上に説明したランプ電圧Vlaの変化における各制御の切り換えと、機械学習駆動パターンDW1の評価の有無の一例を表1に示す。表1においては、所定電力値は140Wである。第1所定電圧値は、56Vである。第2所定電圧値は、53Vである。
なお、例えば、第1所定電圧値は駆動電力Wdの値によって変化するため、制御部40は、ステップS52およびステップS59において判断する第1所定電圧値の値に応じて駆動電力Wdの値を判断し、第1電圧増加制御VIC1と第2電圧増加制御VIC2とのうちいずれを実行するかを決めてもよい。
次に、非機械学習制御NMLCのうち、ちらつき抑制制御FRCについて説明する。ちらつき抑制制御FRCにおいては、非機械学習駆動パターンDW2のうち、ちらつき抑制パターン(第2駆動パターン)DWFが実行される。ちらつき抑制パターンDWFは、機械学習駆動パターンDW1と同様の駆動電流波形を有する。すなわち、ちらつき抑制パターンDWFは、混合期間を含む。
ちらつき抑制パターンDWFにおける第1期間の長さは、機械学習制御MLCで実行される機械学習駆動パターンDW1における第1期間の長さよりも大きい。ちらつき抑制パターンDWFにおける第1期間の長さは、例えば、0.1s(秒)以上である。
ちらつき抑制パターンDWFにおける第1期間の第1周波数f1および第2周波数f2は、機械学習駆動パターンDW1における第1期間の第1周波数f1および第2周波数よりも高い。ちらつき抑制パターンDWFにおける第1期間の第1周波数f1および第2周波数は、例えば、400Hz以上である。
ちらつき抑制パターンDWFにおける第2期間の長さは、機械学習駆動パターンDW1における第2期間の長さよりも小さい。ちらつき抑制パターンDWFにおける第2期間の長さは、例えば、50ms(ミリ秒)以下である。
また、機械学習駆動パターンDW1およびちらつき抑制パターンDWFは、混合期間に加えて第3期間を含んでいてもよい。この場合、ちらつき抑制パターンDWFにおける第3期間の長さは、機械学習駆動パターンDW1における第3期間の長さよりも小さい。ちらつき抑制パターンDWFにおける第3期間の長さは、例えば、0s(秒)である。すなわち、ちらつき抑制パターンDWFにおける第3期間の長さが機械学習駆動パターンDW1における第3期間の長さよりも小さいとは、ちらつき抑制パターンDWFが第3期間を有しないことも含む。
本実施形態においてちらつき抑制パターンDWFは、機械学習制御MLCにおいて実行される複数の機械学習駆動パターンDW1のいずれとも異なる駆動パターンDWである。なお、ちらつき抑制パターンDWFの一部の駆動パラメーターは、複数の機械学習駆動パターンDW1のうちのいずれかの機械学習駆動パターンDW1の駆動パラメーターと同じであってもよい。
本実施形態において制御部40は、駆動電力Wdの変化に基づいて、機械学習制御MLCとちらつき抑制制御FRCとを切り換える。図16は、機械学習制御MLCとちらつき抑制制御FRCとの切り換えにおける制御部40の制御手順の一例を示すフローチャートである。図17は、駆動電力Wdの変化と制御の切り換わりの一例を示すグラフである。図17において、縦軸は駆動電力Wdを示しており、横軸は時間Tを示している。
図16に示すように、制御部40は、機械学習制御MLCを実行し(ステップS61)、機械学習制御MLCの実行中に、駆動電力Wdの変化の割合が所定割合以上か否かを判断する(ステップS62)。駆動電力Wdの変化の割合が所定割合以上であるとは、駆動電力Wdが変化した場合において、変化する前の駆動電力Wdに対する駆動電力Wdの変化量の割合が所定の値以上となることである。所定割合は、例えば、10%である。この場合、変化する前の駆動電力Wdが230Wであれば、駆動電力Wdの変化量が±23W以上である場合に、駆動電力Wdの変化の割合が所定割合以上となる。
本実施形態において駆動電力Wdの変化量は、一定時間内における駆動電力Wdの最大値からの変化量として、判断される。一定時間は、例えば、2h(時間)である。具体的には、例えば、図17に示す時刻T1において、駆動電力Wdが一定時間における最大値Wdmaxとなる場合、駆動電力Wdが最大値Wdmaxから所定割合だけ変化した値Wd1となる時刻T2が、駆動電力Wdの変化の割合が所定割合以上となる時刻である。図17の例では、駆動電力Wdが最大値Wdmaxから所定割合だけ低下して値Wd1となる場合を示している。
図16に示すように、駆動電力Wdの変化の割合が所定割合よりも小さい場合(ステップS62:NO)、制御部40は、機械学習制御MLCを継続して実行する。一方、駆動電力Wdの変化の割合が所定割合以上である場合(ステップS62:YES)、制御部40は、機械学習制御MLCを中止して、ちらつき抑制制御FRCを実行する(ステップS63)。すなわち、制御部40は、機械学習制御MLCからちらつき抑制制御FRCに切り換える。これにより、制御部40は、ちらつき抑制パターンDWFを実行する。この場合、上述した機械学習制御MLCのフローチャートに関わらず、制御部40は、機械学習駆動パターンDW1の実行を強制的に終了して、ちらつき抑制パターンDWFを実行する。
ちらつき抑制制御FRCを開始した後、制御部40は、ちらつき抑制制御FRCを開始してから、上限時間が経過したか否かを判断する(ステップS64)。上限時間は、例えば、5min(分)以上、2h(時間)以下である。なお、上限時間は、5min(分)より短くてもよい。上限時間が経過した場合(ステップS64:YES)、制御部40は、ちらつき抑制制御FRCを終了して、機械学習制御MLCを実行する(ステップS66)。すなわち、制御部40は、ちらつき抑制制御FRCから機械学習制御MLCに切り換える。この場合、ちらつき抑制制御FRCの実行時間tcの長さは、上限時間の長さと同じである。
以上のように、制御部40は、駆動電力Wdの変化の割合が所定割合以上である場合に、機械学習駆動パターンDW1(第1駆動パターン)と異なるちらつき抑制パターン(第2駆動パターン)DWFを上限時間実行する。このように、本実施形態において非機械学習制御NMLCが実行される所定の条件は、駆動電力Wdの変化の割合が所定割合以上であることを含む。
上限時間が経過していない場合(ステップS64:NO)、動作検出部60の電圧検出部は、放電灯90のランプ電圧Vlaを検出する。そして、制御部40は、ちらつき抑制制御FRCを開始してから、検出されたランプ電圧Vlaが第3所定値(所定値)以上低下したか否かを判断する(ステップS65)。第3所定値は、例えば、3Vである。ちらつき抑制制御FRCを開始してからランプ電圧Vlaが第3所定値以上低下していない場合(ステップS65:NO)、制御部40は、ちらつき抑制制御FRCを継続して実行する。
一方、ちらつき抑制制御FRCを開始してからランプ電圧Vlaが第3所定値以上低下した場合(ステップS65:YES)、制御部40は、ちらつき抑制制御FRCを終了して、機械学習制御MLCを実行する(ステップS66)。すなわち、ちらつき抑制制御FRCを開始してから上限時間が経過していない場合であっても、ランプ電圧Vlaが第3所定値以上低下した場合には、ちらつき抑制パターンDWFが終了される。このように、本実施形態においては、制御部40は、ちらつき抑制パターンDWFの実行を開始した後にランプ電圧Vlaが第3所定値以上低下した場合、ちらつき抑制パターンDWFを終了し、機械学習に基づく機械学習駆動パターンDW1の選択および実行を行う。この場合、ちらつき抑制制御FRCの実行時間tcの長さは、上限時間の長さよりも短い。
以上に説明したように、本実施形態において制御部40は、ちらつき抑制パターンDWFの実行時間の長さまたはランプ電圧Vlaに基づいて、ちらつき抑制パターンDWFから機械学習に基づく機械学習駆動パターンDW1に切り換える。
次に、非機械学習制御NMLCのうち、高負荷駆動制御HLCについて説明する。高負荷駆動制御HLCにおいては、非機械学習駆動パターンDW2のうち、高負荷駆動パターンDWHが実行される。高負荷駆動パターンDWHは、機械学習駆動パターンDW1よりも第1電極92および第2電極93に加える熱負荷が大きい駆動パターンDWである。高負荷駆動パターンDWHは、機械学習駆動パターンDW1よりも第1電極92および第2電極93に加える熱負荷が大きければ、特に限定されない。高負荷駆動パターンDWHは、例えば、機械学習駆動パターンDW1の駆動電流波形に対してデューティー比が大きく変調された駆動パターンDWであってもよいし、機械学習制御MLCが実行される際の駆動電力Wdよりも駆動電力Wdが大きい駆動パターンDWであってもよい。
本実施形態において制御部40は、放電灯90の点灯と消灯とが実行された履歴に基づいて、機械学習制御MLCと高負荷駆動制御HLCとを切り換える。図18は、機械学習制御MLCと高負荷駆動制御HLCとの切り換えにおける制御部40の制御手順の一例を示すフローチャートである。図19は、放電灯90の点灯と消灯との実行および制御の切り換わりの一例を示すグラフである。図19において、縦軸は放電灯90の点灯と消灯とを示しており、横軸は時間Tを示している。
図18に示すように、制御部40は、放電灯90が点灯された(ステップS71)後、短点灯SLが所定回数連続して実行されたか否かを判断する(ステップS72)。すなわち、制御部40は、短点灯SLの連続実行回数が所定回数以上であるか否かを判断する。短点灯SLは、放電灯90の1回の点灯時間teが第1所定時間以下となる点灯である。第1所定時間は、例えば、10min(分)である。所定回数は、例えば、6回である。
短点灯SLが所定回数連続して実行されていない場合(ステップS72:NO)、制御部40は、機械学習制御MLCを実行する(ステップS75)。一方、短点灯SLが所定回数連続して実行されていた場合(ステップS72:YES)、制御部40は、高負荷駆動制御HLCを実行する(ステップS73)。これにより、高負荷駆動パターンDWHが実行される。
高負荷駆動制御HLCを開始した後、制御部40は、高負荷駆動制御HLCが開始されてから第2所定時間Ptが経過したか否かを判断する(ステップS74)。第2所定時間Ptは、例えば、10min(分)以上である。第2所定時間Ptが経過していない場合(ステップS74:NO)、制御部40は、高負荷駆動制御HLCを継続して実行する。一方、第2所定時間Ptが経過した場合(ステップS74:YES)、制御部40は、高負荷駆動制御HLCを終了して、機械学習制御MLCを実行する(ステップS75)。すなわち、制御部40は、高負荷駆動制御HLCから機械学習制御MLCに切り換える。
以上のように、本実施形態において制御部40は、短点灯SLが所定回数連続して実行された場合、機械学習駆動パターンDW1よりも第1電極92および第2電極93に加える熱負荷が大きい高負荷駆動パターンDWHを第2所定時間Pt実行する。このように、本実施形態において非機械学習制御NMLCが実行される所定の条件は、短点灯SLが所定回数連続して実行されたことを含む。
次に、非機械学習制御NMLCのうち、強制入力制御CICについて説明する。強制入力制御CICは、入力部45が操作を受け付けることによって行われる制御である。本実施形態において入力部45は、ちらつき抑制パターンDWFの実行入力と、駆動パターンDWの切り換え入力と、を受け付ける。すなわち、本実施形態において非機械学習制御NMLCが実行される所定の条件は、入力部45がちらつき抑制パターンDWFの実行入力を受け付けたことと、入力部45が駆動パターンDWの切り換え入力を受け付けたことと、を含む。
制御部40は、入力部45がちらつき抑制パターンDWFの実行入力を受け付けた場合に、実行中の駆動パターンDWからちらつき抑制パターンDWFに切り換える。ちらつき抑制パターンDWFに切り換えた後、制御部40は、上述したちらつき抑制制御FRCと同様の制御を実行する。入力部45がちらつき抑制パターンDWFの実行入力を受け付けた場合の駆動パターンDWの切り換えは、例えば、制御部40が上述したいずれの制御を実行している最中であっても実行される。
制御部40は、入力部45が駆動パターンDWの切り換え入力を受け付けた場合に、実行中の駆動パターンDWから他の駆動パターンDWに切り換える。本実施形態において、入力部45が駆動パターンDWの切り換え入力を受け付けた場合の他の駆動パターンDWへの切り換えは、例えば、機械学習制御MLCを実行している最中に実行される。機械学習制御MLCの実行中に入力部45が駆動パターンDWの切り換え入力を受け付けた場合、制御部40は、機械学習制御MLCを行う場合と同様にして次の機械学習駆動パターンDW1を選択し、その機械学習駆動パターンDW1に強制的に切り換える。すなわち、強制入力制御CICにおいて実行される非機械学習駆動パターンDW2は、機械学習駆動パターンDW1と同様の駆動パターンDWを含む。
制御部40は、上述したようにして入力部45が受け付けた入力に基づく駆動パターンDWの切り換えから一定期間、切り換えの直前に実行されていた駆動パターンDWを実行しない。例えば、機械学習制御MLCにおいて入力部45が受け付けた入力に基づいて駆動パターンDWが切り換えられた場合には、使用者が入力部45に対して入力操作を行った際に実行されていた機械学習駆動パターンDW1を一定期間実行しない。具体的には、例えば、制御部40は、使用者が入力部45に対して入力操作を行った際に実行されていた機械学習駆動パターンDW1の評価を、上述したステップS28において現在選択されている駆動パターンDWが切換条件を満たす場合の処理と同程度に下げることで、機械学習制御MLCにおいて、切り換え前の機械学習駆動パターンDW1が一定期間、選択・実行されないようにする。
上述した制御を行う制御部40を備える放電灯点灯装置10は、放電灯駆動方法としても表現できる。すなわち、本実施形態の放電灯駆動方法の一つの態様は、第1電極92および第2電極93を有する放電灯90に駆動電流Iを供給して、放電灯90を駆動する放電灯駆動方法であって、機械学習に基づいて、複数の駆動パターンDWのうちいずれか1つの駆動パターンDWを選択し、選択された駆動パターンDWを実行し、所定の条件が満たされた場合、機械学習に基づく駆動パターンDWを選択および実行せずに、複数の駆動パターンDWのうち所定の駆動パターンDWを実行することを特徴とする。
例えば、従来においては、ランプ電圧Vlaの値と駆動電力Wdの値とに対応した駆動パターンDWが予め設定されていたため、ランプ電圧Vlaおよび駆動電力Wdが同じ値である場合には、実行される駆動パターンDWは、予め設定された1つの駆動パターンDWであった。
これに対して、本実施形態では、機械学習によって機械学習駆動パターンDW1が選択されるため、例えば、ランプ電圧Vlaが所定の電圧値であり駆動電力Wdが所定の電力値である場合、少なくとも1つの駆動パラメーターが互いに異なる複数の機械学習駆動パターンDW1が実行される。すなわち、例えば、制御部40、放電灯90に供給される駆動電力Wdが所定の電力帯であり、かつ、放電灯90のランプ電圧Vlaが所定の電圧値である場合に、少なくとも3つの機械学習駆動パターンDW1を実行する。この少なくとも3つの機械学習駆動パターンDW1は、1つの機械学習駆動パターンDW1を構成する駆動における複数の駆動パラメーターのうちの少なくとも1つの駆動パラメーターの値が互いに異なる機械学習駆動パターンDW1である。すなわち、ランプ電圧Vlaを一定とし、かつ、駆動電力Wdの電力帯を一定として放電灯90に供給される駆動電流Iの機械学習駆動パターンDW1を検出する場合、少なくとも3つ以上の異なる機械学習駆動パターンDW1を検出可能である。なお、所定の電力帯とは、例えば、幅が10W以内程度の駆動電力Wdの数値範囲である。
また、上述したように機械学習によって機械学習駆動パターンDW1の選択・実行を行うと、放電灯90のランプ電圧Vlaが所定の電圧値である場合、放電灯90の累積点灯時間あるいは放電灯90の個体が異なることで、選択・実行される機械学習駆動パターンDW1が異なる。すなわち、制御部40は、放電灯90のランプ電圧Vlaが所定の電圧値である場合、放電灯90の累積点灯時間および放電灯90の個体のうちの少なくとも一方に応じて、少なくとも2つの機械学習駆動パターンDW1、例えば第3駆動パターンおよび第4駆動パターンを実行する。
第3駆動パターンと第4駆動パターンとは、複数の機械学習駆動パターンDW1のうちの任意の2つの機械学習駆動パターンDW1である。第3駆動パターンと第4駆動パターンとは、各駆動パターンを構成する駆動における複数の駆動パラメーターのうち少なくとも1つの駆動パラメーターの値が互いに異なる。なお、累積点灯時間は、放電灯90が点灯された時間の総計である。すなわち、累積点灯時間は、放電灯90が初めて点灯したときから積算された放電灯90の点灯時間である。
具体的には、例えば、制御部40は、ランプ電圧Vlaが所定の電圧値であり、かつ、累積点灯時間が第1累積点灯時間である場合、第3駆動パターンを実行し、ランプ電圧Vlaが所定の電圧値であり、かつ、累積点灯時間が第1累積点灯時間とは異なる第2累積点灯時間である場合、第4駆動パターンを実行する。すなわち、ランプ電圧Vlaを一定として放電灯90に供給される駆動電流Iの機械学習駆動パターンDW1を検出する場合、放電灯90の累積点灯時間が変わると、異なる機械学習駆動パターンDW1を少なくとも2つ以上検出可能である。
また、例えば、制御部40は、ランプ電圧Vlaが所定の電圧値であり、かつ、放電灯90が第1個体である場合、第3駆動パターンを実行し、ランプ電圧Vlaが所定の電圧値であり、かつ、放電灯90が第1個体とは異なる第2個体である場合、第4駆動パターンを実行する。すなわち、ランプ電圧Vlaを一定として放電灯90に供給される駆動電流Iの機械学習駆動パターンDW1を検出する場合、放電灯90の個体が変わると、異なる機械学習駆動パターンDW1を少なくとも2つ以上検出することが可能である。
なお、複数の駆動パラメーターのうち少なくとも1つの駆動パラメーターの値が互いに異なるとは、例えば2つの機械学習駆動パターンDW1の間で、各機械学習駆動パターンDW1を構成する駆動が異なる場合を含む。より具体的には、例えば、第3駆動パターンが交流駆動で構成され、第4駆動パターンが直流駆動および交流駆動で構成され、かつ、第3駆動パターンにおける交流駆動に関する各駆動パラメーターと第4駆動パターンにおける交流駆動に関する各パラメーターとが同じである場合も、第3駆動パターンと第4駆動パターンとは、少なくとも1つの駆動パラメーターの値が互いに異なる機械学習駆動パターンDW1とする。この場合、第3駆動パターンには直流駆動が含まれないため、第3駆動パターンにおける直流駆動に関する駆動パラメーターをゼロとみなす。これにより、この場合において第3駆動パターンと第4駆動パターンとは、直流駆動に関する駆動パラメーターが互いに異なる。
本実施形態によれば、上述したようにして、制御部40は、機械学習に基づいて、複数の機械学習駆動パターンDW1のうちからいずれか1つの機械学習駆動パターンDW1を選択して、選択した機械学習駆動パターンDW1を実行する。そのため、放電灯90に個体差がある場合であっても、機械学習を行うことで、放電灯90の個体差に応じて、好適な機械学習駆動パターンDW1を選択することができる。したがって、本実施形態によれば、放電灯90の個体差によらず、放電灯90の寿命を向上させることができる。
また、放電灯90に供給される駆動電力Wdが変化すると、第1電極92の突起552pの溶融度合い、および成長度合いが変化する。そのため、従来では、放電灯90に供給される駆動電力Wdごとに、ランプ電圧Vlaに応じて、放電灯90に供給される駆動電流Iの好適な駆動パターンDWを決め、記憶部44に格納しておく必要があった。したがって、全ての駆動電力Wdごとにランプ電圧Vlaに応じた駆動パターンDWを設定しておくことは困難であり、予め決められた複数種類の駆動電力Wdにしか、放電灯90に供給される駆動電力Wdを変更できない仕様となっていた。
これに対して、本実施形態によれば、機械学習に基づいて機械学習駆動パターンDW1が選択されるため、駆動電力Wdを変化させた場合であっても、駆動電力Wdの変化に応じて、好適な機械学習駆動パターンDW1を選択することができる。これにより、放電灯90に供給される駆動電力Wdを容易に多段階で変化させることが可能となる。したがって、例えば、使用者が、駆動電力Wdを任意に変化させて、プロジェクター500から投射される映像の輝度を自由に変更することが可能となる。そのため、例えば、駆動電力Wdを比較的小さくして、プロジェクター500の消費電力を好適に抑えつつ、放電灯90の寿命を向上させることも可能となる。
また、駆動電力Wdを任意に変更することが可能となるため、放電灯90の寿命を向上させる際に変化させる機械学習駆動パターンDW1の駆動パラメーターの一つとして、駆動電力Wdを用いることも可能となる。これにより、放電灯90の寿命をより向上させることができる。例えば、プロジェクター500の筐体には、駆動電力Wdを変化させるための操作部を設けてもよい。
また、本実施形態によれば、制御部40は、ランプ電圧Vlaの変化に基づいて機械学習駆動パターンDW1の選択を行う。そのため、ランプ電圧Vlaを検出することで、機械学習駆動パターンDW1の選択を行うことができ、機械学習を好適かつ容易に行うことができる。
また、本実施形態によれば、制御部40は、選択された機械学習駆動パターンDW1の実行時において、検出されたランプ電圧Vlaの変化が切換条件を満たす場合、選択された機械学習駆動パターンDW1から他の機械学習駆動パターンDW1に切り換える。そのため、選択された機械学習駆動パターンDW1が、そのときの放電灯90の状態に対して寿命を向上させるのに好ましくない機械学習駆動パターンDW1である場合に、機械学習駆動パターンDW1を他の好適な機械学習駆動パターンDW1へ切り換えられる。したがって、放電灯90の寿命が低下することを抑制できる。
また、上述したように、切換条件を満たした機械学習駆動パターンDW1は、評価を下げられ、かつ、ステップS24において次に当該切換条件を満たした機械学習駆動パターンDW1が選択され、ステップS25において当該切換条件を満たした機械学習駆動パターンDW1が実行条件を満たすか判断される際に、実行条件を満たさないと判断される。すなわち、制御部40は、所定期間の間、当該切換条件を満たした機械学習駆動パターンDW1を実行しない。そのため、本実施形態によれば、放電灯90の寿命を低下させる可能性が高い機械学習駆動パターンDW1が実行されることを抑制でき、放電灯90の寿命をより向上させることができる。
上述したように制御部40は、選択された機械学習駆動パターンDW1の実行を開始してから定常学習時間が経過した場合に、次の機械学習駆動パターンDW1を選択するため、機械学習駆動パターンDW1の実行時間(所定時間)の長さは基本的には、定常学習時間の長さと同じになる。しかし、定常学習期間において選択された機械学習駆動パターンDW1は、放電灯90の状態によって、定常学習時間が経過する前に途中で他の機械学習駆動パターンDW1へ切り換えられることがあるため、同じ機械学習駆動パターンDW1であっても、1つの機械学習駆動パターンDW1の実行を開始してから次の機械学習駆動パターンDW1に切り換えられるまでの、選択された1つの機械学習駆動パターンDW1の実行時間(所定時間)が変化する場合がある。
すなわち、制御部40は、ランプ電圧Vlaに基づいて、複数の機械学習駆動パターンDW1のうちの所定の機械学習駆動パターンDW1が実行される実行時間(所定時間)の長さを変化させる。そのため、ランプ電圧Vlaの変化に応じて、適宜機械学習駆動パターンDW1を切り換えることができ、放電灯90の寿命をより向上できる。
また、複数の機械学習駆動パターンDW1のうちの所定の機械学習駆動パターンDW1が実行される実行時間の長さは、上述したようにして変化するため、放電灯90の累積点灯時間に応じて変化する。また、複数の機械学習駆動パターンDW1のうちの所定の駆動パターンが実行される実行時間の長さは、上述したようにして変化するため、放電灯90の個体に応じて変化する。選択された機械学習駆動パターンDW1が途中で他の機械学習駆動パターンDW1へ切り換えられた場合、当該選択された機械学習駆動パターンDW1の実行時間(所定時間)は、定常学習時間よりも短い。
また、例えば、評価が最も高い機械学習駆動パターンDW1、すなわち、放電灯90のランプ電圧Vlaを目標数値範囲に最も近付ける機械学習駆動パターンDW1であっても、常に同じ機械学習駆動パターンDW1を実行する場合には、第1電極92の突起552pが成長しにくくなる場合があり、放電灯90の寿命を十分に向上させにくくなる場合がある。また、例えば、放電灯90の第1電極92の突起552pの溶融度合いおよび成長度合いは、放電灯90の劣化、すなわち累積点灯時間の増加に伴って変化する。そのため、ある時点において放電灯90の寿命を向上させるために好適な機械学習駆動パターンDW1であっても、別の時点において放電灯90の寿命を向上させるために不適な機械学習駆動パターンDW1となることがある。
これに対して、本実施形態によれば、制御部40は、定常学習期間の1サイクルにおいて、N個の機械学習駆動パターンDW1の中から選択されていない機械学習駆動パターンDW1および比較的評価の高い機械学習駆動パターンDW1のうち一方を選択・実行する。そのため、1サイクル内において、評価の最も高い機械学習駆動パターンDW1を含む比較的評価の高い機械学習駆動パターンDW1と、それ以外の機械学習駆動パターンDW1と、の両方が実行される。すなわち、本実施形態の制御部40は、一定の期間内において、複数の機械学習駆動パターンDW1のうち評価の最も高い機械学習駆動パターンDW1を含む比較的評価の高い機械学習駆動パターンDW1(以下、高評価駆動パターンDWmと呼ぶ)と、複数の機械学習駆動パターンDW1のうち高評価駆動パターンDWmよりも評価の低い機械学習駆動パターンDW1(以下、他の駆動パターンDWeと呼ぶ)と、の両方を実行する。これにより、評価の高い高評価駆動パターンDWmの間に、高評価駆動パターンDWmよりも評価が低い他の駆動パターンDWeを実行することができ、第1電極92に対して加えられる熱負荷の刺激を大きく変動させやすい。したがって、突起552pを成長させやすく、放電灯90の寿命をより向上させやすい。
また、本実施形態によれば、制御部40は、選択された機械学習駆動パターンDW1が実行された前後のランプ電圧Vlaの変化が連続実行条件を満たす場合、当該選択された機械学習駆動パターンDW1を複数回、連続して実行する。ここで、本実施形態は、ランプ電圧Vlaが所定の電圧値であり駆動電力Wdが所定の電力値である場合、少なくとも1つの駆動パラメーターが互いに異なる複数の機械学習駆動パターンDW1が実行される構成である。すなわち、本実施形態は、1つの条件下で2つ以上の機械学習駆動パターンDW1のうち1つが選択され実行されるというランダム性を有する一方で、選択された機械学習駆動パターンDW1が連続実行条件を満たした場合には、1つの同じ駆動パターンが連続して実行されることになる特性も有する。そのため、放電灯90の寿命を向上させるのに好適な機械学習駆動パターンDW1を複数回、連続して実行することができ、放電灯90の寿命をより向上させやすい。また、本実施形態において連続実行条件は、連続実行回数が所定回数以下であることを含む。そのため、放電灯90の状態が大きく変化しない程度の実行時間で、好適な機械学習駆動パターンDW1を複数回、連続して実行することができる。したがって、放電灯90の寿命をより向上させやすい。
また、本実施形態によれば、制御部40は、ステップS25で示したように実行条件を満たすか否かの判断を行い、実行条件を満たさない場合には、その機械学習駆動パターンDW1を実行しない。これにより、評価が比較的低い機械学習駆動パターンDW1が実行されにくい。したがって、放電灯90の寿命をより向上させやすい。
以上のような機械学習に基づいて機械学習駆動パターンDW1が選択・実行されるため、本実施形態においては、ランプ電圧Vlaによらず、各機械学習駆動パターンDW1が実行される確率は互いに異なる。すなわち、放電灯90のランプ電圧Vlaが所定の電圧値である場合、第3駆動パターンが実行される確率と、第4駆動パターンが実行される確率と、は互いに異なる。
また、少なくとも第3駆動パターンおよび第4駆動パターンがそれぞれ1回以上実行される実行期間において、実行期間の長さに対する第3駆動パターンが実行される実行時間の割合と、実行期間の長さに対する第4駆動パターンが実行される実行時間の割合と、は互いに異なる。実行期間とは、例えば、定常学習期間の1サイクルに相当する。
また、少なくとも第3駆動パターンおよび第4駆動パターンがそれぞれ1回以上実行される実行期間、すなわち例えば定常学習期間の1サイクルにおいて、第3駆動パターンが実行される回数と、第4駆動パターンが実行される回数と、は互いに異なる。第3駆動パターンを、評価の最も高い機械学習駆動パターンDW1を含む高評価駆動パターンDWmとし、第4駆動パターンを、他の駆動パターンDWeのうちの1つの機械学習駆動パターンDW1とする場合、第3駆動パターンが実行される回数は、第4駆動パターンが実行される回数よりも多い。
また、例えば、選択される複数の機械学習駆動パターンDW1の個数(N)が少なすぎると、放電灯90の状態に応じた好適な機械学習駆動パターンDW1が含まれていない場合がある。一方、機械学習駆動パターンDW1の個数が多すぎると、初期学習期間に時間が掛かり、好適な機械学習駆動パターンDW1を選択するまでに時間が掛かる。また、定常学習期間において好適な機械学習駆動パターンDW1以外の実行する割合が大きくなる。
これに対して、機械学習駆動パターンDW1の個数を10パターン以上、100パターン以下とすれば、放電灯90の状態に応じた好適な機械学習駆動パターンDW1を選択しやすく、初期学習期間の時間も短くできる。また、定常学習期間において好適な機械学習駆動パターンDW1の割合を大きくできるため、より放電灯90の寿命を向上できる。また、機械学習駆動パターンDW1の個数を20パターン以上、30パターン以下とすれば、これらの効果をより高く得られる。
上述したように、機械学習を用いることによって、実行される機械学習駆動パターンDW1を好適に選択することができ、放電灯90の寿命を向上できる。しかし、機械学習のみを用いているだけでは、放電灯90の寿命以外の観点で不具合が生じる場合も考えられる。そのため、機械学習のみを用いる場合には、放電灯90の寿命は向上できるものの、放電灯90が搭載されたプロジェクター500等の機器を使用する使用者の利便性および快適性が低下する場合があった。
これに対して、本実施形態によれば、所定の条件が満たされた場合、機械学習に基づく機械学習駆動パターンDW1の選択および実行をせずに、所定の駆動パターンDWとして非機械学習駆動パターンDW2を実行する。そのため、機械学習に基づいた機械学習制御MLCとは別に、機械学習によらず、個別の問題ごとに好適な駆動パターンDWを選択・実行することができる。これにより、本実施形態によれば、機械学習に基づいて放電灯90の寿命を向上させつつ、使用者の利便性および快適性を向上させることができる。
具体的に、放電灯90の寿命以外の観点で不具合が生じる場合としては、水銀ブリッジが生じる場合が挙げられる。例えば、比較的初期の状態の放電灯90においては、第1電極92および第2電極93の突起552p,562pが成長し過ぎて、電極間距離が比較的小さくなる場合がある。この場合、放電灯90を消灯した後に、放電灯90内で液化した水銀が第1電極92と第2電極93とに跨って付着する水銀ブリッジが生じる場合がある。水銀ブリッジが生じると第1電極92と第2電極93とが短絡するため、放電灯90が点灯しなくなる。
このような水銀ブリッジが生じることを抑制するためには、電極間距離を大きくするような駆動パターンDWを実行することが考えられる。しかし、通常、このような駆動パターンDWは、放電灯90の寿命を低下させやすい。そのため、機械学習制御MLCにおいて選択される機械学習駆動パターンDW1のうちには、電極間距離を大きくするような駆動パターンDWを含めないことが好ましい。しかし、そうすると、機械学習制御MLCを実行しても、水銀ブリッジを抑制することが難しい問題があった。
これに対して、本実施形態によれば、制御部40は、ランプ電圧Vlaが第1所定電圧値よりも小さい場合、所定の駆動パターンDWとして、低周波期間を含む第1電圧増加パターンDWV1あるいは第2電圧増加パターンDWV2を実行する。そのため、ランプ電圧Vlaが比較的小さくなった場合、すなわち突起552p,562pが成長し過ぎて電極間距離が比較的小さくなった場合に、機械学習によらず、第1電圧増加パターンDWV1あるいは第2電圧増加パターンDWV2を実行できる。
低周波期間においては、第1期間において放電灯90に供給される交流電流の第1周波数f1および第2周波数f2よりも低い第3周波数f3を有する交流電流が放電灯90に供給される。そのため、低周波期間を含む駆動パターンDWを実行すると、第1電極92および第2電極93の突起552p,562pを溶融させて短くさせやすく、第1電極92と第2電極93との電極間距離を大きくすることができる。したがって、第1電圧増加パターンDWV1あるいは第2電圧増加パターンDWV2を実行することにより、水銀ブリッジが生じることを抑制できる。これにより、本実施形態によれば、放電灯90の寿命を向上させつつ、水銀ブリッジが生じることを抑制でき、使用者の利便性を向上できる。
また、例えば、低周波期間のみで構成される第1電圧増加パターンDWV1を実行する場合、駆動電力Wdが比較的小さい場合には、第1電極92および第2電極93に加えられる熱負荷は比較的大きいものの、極性が切り換わるまでに溶融できる第1電極92および第2電極93の部分は比較的小さく、突起552p,562pが成長するまでには至りにくい。したがって、突起552p,562pを短くできる。一方、駆動電力Wdが比較的大きい場合には、第1電極92および第2電極93に加えられる熱負荷が好適に大きくなり、極性が切り換わるまでに溶融できる第1電極92および第2電極93の部分が比較的大きくなる。これにより、駆動電力Wdが比較的大きい場合に、第1電圧増加パターンDWV1を実行すると、突起552p,562pが成長する場合がある。したがって、水銀ブリッジが生じることを抑制しにくい場合がある。
これに対して本実施形態によれば、ランプ電圧Vlaが第1所定電圧値よりも小さく、かつ、放電灯90に供給される駆動電力Wdが所定電力値以上の場合、所定の駆動パターンDWとして低周波期間と第3期間とを含む第2電圧増加パターンDWV2を実行する。第3期間は、第1電極92および第2電極93に加える熱負荷が低周波期間よりも大きい。そのため、駆動電力Wdが所定電力値以上の場合、すなわち駆動電力Wdが比較的大きい場合に、第3期間を実行すると、第1電極92および第2電極93に加えられる熱負荷を過剰に大きくでき、突起552p,562pを潰すことができる。これにより、成長し過ぎた突起552p,562pを好適に短くでき、水銀ブリッジを抑制できる。
また、例えば、駆動電力Wdが所定電力値よりも小さい場合、すなわち駆動電力Wdが比較的小さい場合に、第2電圧増加パターンDWV2を実行すると、第1電極92および第2電極93に加えられる熱負荷が好適に大きくなる。そのため、突起552p,562pが成長して、水銀ブリッジが生じることを抑制しにくい場合がある。したがって、上述したように、駆動電力Wdに応じて、第1電圧増加パターンDWV1と第2電圧増加パターンDWV2とを適宜実行することで、突起552p,562pをより好適に短くでき、水銀ブリッジが生じることをより抑制できる。
また、例えば、第1電圧増加パターンDWV1あるいは第2電圧増加パターンDWV2によって突起552p,562pを短くする場合であっても、過剰に突起552p,562pを潰し過ぎると、機械学習制御MLCを再び実行した際に突起552p,562pを成長させにくい場合がある。
これに対して、本実施形態によれば、低周波期間は、放電灯90に供給される交流電流の周波数が互いに異なる複数の交流期間を有する。これにより、第1電圧増加パターンDWV1あるいは第2電圧増加パターンDWV2を実行した場合に、第1電極92および第2電極93に熱負荷の変化による刺激を適度に与えることができ、突起552p,562pが成長しやすい土台を作りつつ、突起552p,562pを短くすることができる。したがって、突起552p,562pを短くして水銀ブリッジを抑制しつつ、機械学習制御MLCに戻った際に突起552p,562pを成長させやすくできる。
また、放電灯90の寿命以外の観点で不具合が生じる場合としては、ちらつきが生じる場合が挙げられる。例えば、駆動電力Wdが急激に上昇すると、上昇する前の比較的小さい駆動電力Wdによって形成された突起552p,562pの太さに対して、第1電極92および第2電極93に加えられる熱負荷が過剰に大きくなりやすい。そのため、突起552p,562pが溶融して無くなる場合がある。したがって、第1電極92の表面および第2電極93の表面においてアーク放電の輝点が移動する場合がある。輝点が移動すると、電極間距離が変化してアーク放電の大きさが変化するため、放電灯90の照度が変化し、ちらつきが生じる場合がある。
また、例えば、駆動電力Wdが急激に低下すると、低下する前の比較的大きい駆動電力Wdによって形成された突起552p,562pの太さに対して、アーク放電の輝点の大きさが小さくなりやすい。そのため、突起552p,562p上を輝点が移動しやすい。したがって、ちらつきが生じる場合がある。
これに対して、本実施形態によれば、機械学習に基づく機械学習駆動パターンDW1の選択および実行をせずに、所定の駆動パターンDWが実行される所定の条件は、駆動電力Wdの変化の割合が所定割合以上であることを含む。そのため、駆動電力Wdが急激に変化した場合に、ちらつきを好適に抑制できる所定の駆動パターンDW、すなわち上述した実施形態では、ちらつき抑制パターンDWFを実行できる。したがって、放電灯90にちらつきが生じることを抑制でき、プロジェクター500から投射される画像がちらつくことを抑制できる。その結果、使用者の快適性を向上できる。
具体的に本実施形態によれば、ちらつき抑制パターンDWFにおける第1期間の長さは、機械学習制御MLCにおいて実行される機械学習駆動パターンDW1における第1期間の長さよりも大きい。また、ちらつき抑制パターンDWFにおける第1期間の第1周波数f1および第2周波数f2は、機械学習制御MLCにおいて実行される機械学習駆動パターンDW1における第1期間の第1周波数f1および第2周波数f2よりも高い。そのため、極性が一定に維持される時間を短くすることができアーク放電の輝点の位置を安定させつつ、第1電極92および第2電極93の一部のみを溶融・凝固させて成長させることができる。これにより、細長の小突起を迅速に形成することができる。小突起が形成されることで、アーク放電の輝点は小突起の先端位置に安定するため、アーク放電の輝点が移動することが抑制される。したがって、本実施形態によれば、駆動電力Wdが急激に変化した場合に、ちらつきが生じることを抑制できる。
また、本実施形態によれば、ちらつき抑制パターンDWFにおける第2期間の長さは、機械学習制御MLCにおいて実行される機械学習駆動パターンDW1における第2期間の長さよりも小さい。そのため、第1電極92および第2電極93に加えられる熱負荷を適度に小さくして、第1電極92および第2電極93における溶融する範囲を狭くできる。これにより、より迅速に小突起を形成しやすい。したがって、放電灯90のちらつきをより好適に抑制できる。
また、本実施形態によれば、ちらつき抑制パターンDWFにおける第3期間の長さは、機械学習制御MLCにおいて実行される機械学習駆動パターンDW1における第3期間の長さよりも小さい。そのため、第1電極92および第2電極93に加えられる熱負荷をより適度に小さくして、第1電極92および第2電極93における溶融する範囲を狭くできる。これにより、より迅速に小突起を形成しやすい。したがって、放電灯90のちらつきをより好適に抑制できる。
また、ちらつき抑制パターンDWFを実行している間は機械学習が実行されないため、ちらつき抑制パターンDWFの実行時間は短い方が好ましい。これに対して、本実施形態によれば、制御部40は、ちらつき抑制パターンDWFを実行した時間またはランプ電圧Vlaに基づいて、ちらつき抑制パターンDWFを終了し、機械学習に基づく機械学習駆動パターンDW1の選択および実行を行う。そのため、ちらつき抑制パターンDWFの実行時間が長くなることを抑制できる。これにより、機械学習が実行される時間の割合を大きくでき、放電灯90の寿命をより向上できる。
また、本実施形態によれば、制御部40は、ちらつき抑制パターンDWFの実行を開始した後にランプ電圧Vlaが第3所定値以上低下した場合、ちらつき抑制パターンDWFを終了し、機械学習に基づく機械学習駆動パターンDW1の選択および実行を行う。ちらつき抑制パターンDWFを実行したことでランプ電圧Vlaがある程度低下した場合、上述した小突起が形成されたと判断できる。そのため、ランプ電圧Vlaが第3所定値以上低下した場合に、ちらつき抑制パターンDWFを終了しても、小突起が形成されているため、ちらつきを抑制できる。したがって、ちらつき抑制パターンDWFの実行時間を短くして放電灯90の寿命をより向上させつつ、ちらつきをより抑制しやすい。
また、本実施形態によれば、制御部40は、入力部45がちらつき抑制パターンDWFの実行入力を受け付けた場合に、実行中の駆動パターンDWをちらつき抑制パターンDWFに切り換える。そのため、例えば、プロジェクター500を使用する使用者が投射される画像にちらつきを感じた場合に、入力部45に所定の入力操作を行うことで、ちらつき抑制パターンDWFを実行することが可能である。これにより、使用者は、ちらつきが生じた場合に、入力部45への入力を行うことで、ちらつきを解消あるいは低減することができる。したがって、使用者の利便性および快適性を向上できる。
また、本実施形態によれば、制御部40は、入力部45が駆動パターンDWの切り換え入力を受け付けた場合に、実行中の駆動パターンDWを他の駆動パターンDWに切り換える。そのため、例えば、プロジェクター500を使用する使用者が投射される画像にちらつきを感じた場合に、入力部45に所定の入力操作を行うことで、他の駆動パターンDWを実行することができる。これにより、使用者は、ちらつきが生じた場合に、入力部45への入力を行うことで、ちらつきを生じる駆動パターンDWから強制的に切り換えることができ、ちらつきを解消あるいは低減しやすい。したがって、使用者の利便性および快適性を向上できる。また、例えば、機械学習制御MLCにおいて選択・実行された機械学習駆動パターンDW1がちらつきを生じる機械学習駆動パターンDW1であった場合に、強制的に次の機械学習駆動パターンDW1の選択・実行を行うことができる。
また、本実施形態によれば、制御部40は、入力部45が受け付けた入力に基づく駆動パターンDWの切り換えから一定期間、切り換えの直前に実行されていた駆動パターンDWを実行しない。切り換え直前に実行されていた駆動パターンDWは、ちらつきを生じていた駆動パターンDWである可能性が高いため、この駆動パターンDWを一定期間実行しないことで、ちらつきが生じることをより抑制できる。
また、例えば、放電灯90の点灯時間が短い短点灯SLが連続して実行されると、1つまたは少数の機械学習駆動パターンDW1を実行する間に、放電灯90の点灯立ち上げ動作が複数回入り、突起552p,562pが変形する場合がある。このような場合、ちらつきが生じやすい。しかし、1つまたは少数の機械学習駆動パターンDW1の実行中においては、短点灯SLが連続して実行されることによって突発的に生じた突起552p,562pの変形に対応しにくい場合があった。そのため、機械学習のみでは、ちらつきを抑制できず、使用者の快適性が低下する場合があった。
これに対して、本実施形態によれば、制御部40は、短点灯SLが所定回数連続して実行された場合、機械学習制御MLCで実行される機械学習駆動パターンDW1よりも第1電極92および第2電極93に加える熱負荷が大きい高負荷駆動パターンDWHを第2所定時間実行する。そのため、連続した短点灯SLによって変形した突起552p,562pを比較的大きい熱負荷によって溶融させ、再成形することができる。これにより、突起552p,562pの変形を解消しやすく、ちらつきが生じることを抑制できる。
なお、本実施形態においては、下記の構成および方法を採用することもできる。
制御部40は、機械学習に基づいて機械学習駆動パターンDW1を選択・実行するならば、機械学習の方法は、特に限定されない。上述した機械学習駆動パターンDW1の評価方法は、特に限定されない。初期学習時間と定常学習時間は、互いに異なってもよい。
また、制御部40は、機械学習制御MLCにおいて、ランプ電圧Vlaが第4所定値以上低下した場合、機械学習駆動パターンDW1を前回実行された機械学習駆動パターンDW1に切り換えてもよい。より具体的には、例えば、選択された1つの機械学習駆動パターンDW1が実行されている際に、制御部40は、定常学習時間内に検出されたランプ電圧Vlaに基づき、ランプ電圧Vlaが第4所定値以上低下しているか否かを判断し、ランプ電圧Vlaが第4所定値以上低下している場合には、前回実行した機械学習駆動パターンDW1に切り換える。この構成によれば、例えば、突起552pが移動してランプ電圧Vlaが急激に低下した場合に、突起552pが移動する前の機械学習駆動パターンDW1に切り換えることができる。これにより、突起552pの位置を移動する前の位置に修正しやすい。また、制御部40は、ランプ電圧Vlaが第4所定値以上低下した場合、機械学習駆動パターンDW1を前回実行された機械学習駆動パターンDW1とは異なる機械学習駆動パターンDW1に切り換えてもよい。
また、制御部40は、機械学習制御MLCにおいて、ランプ電圧Vlaに基づいて、定常学習時間の長さを変化させてもよい。例えば、放電灯90が劣化すると、機械学習駆動パターンDW1によるランプ電圧Vlaの変化が発生するまでの時間が長くなる場合がある。この場合、機械学習駆動パターンDW1の実行時間が短いと、機械学習駆動パターンDW1を適正に評価できない場合がある。これに対して、ランプ電圧Vlaに基づいて、定常学習時間の長さを変化させることで、放電灯90が劣化した場合に定常学習時間を長くして、機械学習駆動パターンDW1の実行時間を長くすることができる。したがって、機械学習駆動パターンDW1を適正に評価しやすく、結果として放電灯90の寿命を向上できる。
また、制御部40は、機械学習制御MLCにおいて、ランプ電圧Vlaに基づいて、機械学習駆動パターンDW1の個数を変化させてもよいし、機械学習駆動パターンDW1の各駆動における駆動パラメーターの種類を変化させてもよい。これらの場合、制御部40は、ランプ電圧Vlaに基づいて、複数の機械学習駆動パターンDW1において互いに異なる駆動パラメーターの種類の数を変化させてもよい。例えば、制御部40は、ランプ電圧Vlaが第1電圧よりも大きい場合に、複数の機械学習駆動パターンDW1において互いに異なる駆動パラメーターの種類の数を多くしてもよい。この構成によれば、放電灯90が劣化した場合に、第1電極92に加えられる熱負荷の変化による刺激を大きくしやすく、放電灯90の寿命をより向上させることができる。
また、制御部40は、機械学習制御MLCにおいて、直前までのランプ電圧Vlaの変化に基づいて、機械学習駆動パターンDW1を選択してもよい。また、制御部40は、定常学習期間の1サイクルにおいて必ず1回ずつ以上、全ての機械学習駆動パターンDW1が実行されるようにしてもよい。また、制御部40は、予め設定された複数の機械学習駆動パターンDW1以外の機械学習駆動パターンDW1を定常学習期間中に作り出してもよい。この場合、制御部40は、予め設定されている各機械学習駆動パターンDW1の評価値に基づいて、駆動パラメーターを組み合わせて新たな機械学習駆動パターンDW1を作ってもよい。
また、制御部40は、初期学習期間でのステップS15において、定常学習期間でのステップS28のように、現在選択されている機械学習駆動パターンDW1が切換条件を満たすか否かを判断してもよい。例えば、現在選択されている機械学習駆動パターンDW1が切換条件を満たす場合、制御部40は、現在選択されている機械学習駆動パターンDW1の評価を下げ、現在選択されている機械学習駆動パターンDW1から他の機械学習駆動パターンDW1へ切り換えてもよい。一方で、現在選択されている機械学習駆動パターンDW1が切換条件を満たさない場合、制御部40は、初期学習時間が経過するまで現在選択されている機械学習駆動パターンDW1を実行してもよい。なお、この場合の切換条件は、ステップS28における切換条件と同じでもよいし、異なっていてもよい。
また、所定の条件が満たされた場合に実行される所定の駆動パターンDWは、機械学習に基づく機械学習駆動パターンDW1の選択・実行でなければ、特に限定されない。すなわち、上述した非機械学習制御NMLCの各例以外の非機械学習制御NMLCが実行されてもよい。例えば、制御部40は、ランプ電圧Vlaが第3所定電圧値よりも大きい場合、所定の駆動パターンDWを実行してもよい。この場合、第3所定電圧値は、例えば、目標数値範囲のうちで最も大きい値である。
また、非機械学習制御NMLCが少なくとも1つ実行されるならば、上述した非機械学習制御NMLCの各例は、いずれか1つ以上が実行されなくてもよい。また、入力部45によって強制的に切り換えられる他の駆動パターンDWは、入力部45への1度の入力によって、連続して複数回切り換えられてもよい。また、入力部45が駆動パターンDWの切り換え入力を受け付けた場合に切り換えられる他の駆動パターンDWは、実行中の駆動パターンDWと異なるならば、特に限定されない。入力部45が駆動パターンDWの切り換え入力を受け付けた場合の他の駆動パターンDWへの切り換えは、上述したいずれの制御を実行している間に行われてもよい。
また、非機械学習制御NMLCが実行される所定の条件は、短点灯SLが所定の割合以上で実行されたことを含んでもよい。制御部40は、短点灯SLが所定の割合以上で実行された場合、高負荷駆動パターンDWHを第2所定時間実行してもよい。短点灯SLが所定の割合以上で実行されるとは、例えば、放電灯90の点灯が一定回数行われた場合に、一定回数の点灯のうちの短点灯SLの占める割合が所定の割合以上であることを含む。短点灯SLが所定の割合以上で実行されるとは、一例として、放電灯90の点灯が20回行われた場合に、20回のうちの15回以上が短点灯SLであった場合等である。この場合、連続して短点灯SLが実行された回数が所定回数より少なくてもよい。
例えば、短点灯SLの連続回数が所定回数よりは少ない場合であっても、頻繁に短点灯SLが実行される場合には、突起552p,562pが変形しやすく、ちらつきが生じやすい。これに対して、この構成によれば、短点灯SLの連続回数が所定回数より少ない場合であっても、高負荷駆動パターンDWHを実行できるため、ちらつきをより抑制できる。
また、上記実施形態において、入力部45は、放電灯点灯装置10の制御部40に接続されていたが、これに限られない。入力部45は、プロジェクター500のCPU580に接続され、入力に応じた信号をCPU580に出力する構成としてもよい。この場合、CPU580は、入力部45からの信号に応じて放電灯点灯装置10を制御する。
また、上記実施形態において、透過型のプロジェクターに本発明を適用した場合の例について説明したが、本発明は、反射型のプロジェクターにも適用することも可能である。ここで、「透過型」とは、液晶パネル等を含む液晶ライトバルブが光を透過するタイプであることを意味する。「反射型」とは、液晶ライトバルブが光を反射するタイプであることを意味する。なお、光変調装置は、液晶パネル等に限られず、例えばマイクロミラーを用いた光変調装置であってもよい。
また、上記実施形態において、3つの液晶パネル560R,560G,560B(液晶ライトバルブ330R,330G,330B)を用いたプロジェクター500の例を挙げたが、本発明は、1つの液晶パネルのみを用いたプロジェクター、4つ以上の液晶パネルを用いたプロジェクターにも適用可能である。
また、上記説明した各構成は、相互に矛盾しない範囲内において、適宜組み合わせることができる。
実施例と比較例とを比べて本発明の有用性について確認した。まず、実施例および比較例ともに、上述した実施形態の機械学習を用いて、2000h(時間)、複数の機械学習駆動パターンDW1を適宜選択・実行させた。すなわち、放電灯の消耗をある程度進行させた。その後、実施例および比較例ともに、放電灯を3min(分)点灯させて3min(分)消灯する操作を100回繰り返した。このとき、実施例においては、7回目以降の点灯時には、機械学習による機械学習駆動パターンDW1の選択・実行を行わずに、高負荷駆動パターンDWHを実行した。比較例においては、7回目以降の点灯時にも、機械学習による機械学習駆動パターンDW1の選択・実行を行った。
機械学習駆動パターンDW1は、図9に示される駆動電流波形を有する駆動パターンDWに基づくものとした。また、複数の駆動パターンDWにおける交流駆動および直流駆動の各駆動パラメーターは、第1周波数f1および第2周波数f2と、交流駆動の実行時間の長さta1,ta2と、直流駆動の実行時間の長さtd1,td2と、の3種類とした。さらに、駆動パラメーターの種類ごとの数値として、第1周波数f1および第2周波数f2を、200Hz、300Hz、400Hzのうちから選び、交流駆動の実行時間の長さta1,ta2を、0.1ms(ミリ秒)、0.2ms(ミリ秒)、0.5ms(ミリ秒)のうちから選び、直流駆動の実行時間の長さtd1,td2を、10ms(ミリ秒)、20ms(ミリ秒)、30ms(ミリ秒)のうちから選ぶものとした。そして、複数の駆動パターンDWの個数は、前述の3種類の駆動パラメーターとその各数値とをそれぞれ組み合わせた全27パターンを用意した。
実施例において用いた高負荷駆動パターンDWHは、図9に示す機械学習駆動パターンDW1と、片寄駆動BDによる機械学習駆動パターンDW1と、を交互に繰り返す駆動パターンDWとした。すなわち、高負荷駆動パターンDWHにおいては、第1期間と、第2期間と、第3期間と、が設けられる。第1期間の第1周波数f1の基本周波数は、200Hzとし、第1期間の長さは、200ms(ミリ秒)とし、第2期間の長さは、10ms(ミリ秒)とし、第3期間の長さは、100ms(ミリ秒)とした。
放電灯は、定格200Wの高圧水銀ランプとした。放電灯に供給される駆動電力Wdは、200Wとした。実施例および比較例において、上述した100回の点灯のうちで、ちらつきが視認できた点灯の回数を数えた。その結果、比較例では、21回の点灯でちらつきが視認されたのに対して、実施例では、1回もちらつきが視認されなかった。したがって、機械学習による機械学習駆動パターンDW1の選択・実行と、機械学習による機械学習駆動パターンDW1の選択・実行をせずに所定の駆動パターンDWを実行することと、を組み合わせることで、ちらつきを抑制できることが確かめられた。以上により、本発明の有用性を確認できた。