JP6907247B2 - 光学的位置感知を使用する医療用ナビゲーション・システム及びその操作方法 - Google Patents
光学的位置感知を使用する医療用ナビゲーション・システム及びその操作方法 Download PDFInfo
- Publication number
- JP6907247B2 JP6907247B2 JP2018568808A JP2018568808A JP6907247B2 JP 6907247 B2 JP6907247 B2 JP 6907247B2 JP 2018568808 A JP2018568808 A JP 2018568808A JP 2018568808 A JP2018568808 A JP 2018568808A JP 6907247 B2 JP6907247 B2 JP 6907247B2
- Authority
- JP
- Japan
- Prior art keywords
- view
- ultrasonic probe
- information
- orientation
- views
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4254—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors mounted on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4263—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors not mounted on the probe, e.g. mounted on an external reference frame
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H30/00—ICT specially adapted for the handling or processing of medical images
- G16H30/40—ICT specially adapted for the handling or processing of medical images for processing medical images, e.g. editing
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00243—Type of minimally invasive operation cardiac
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/254—User interfaces for surgical systems being adapted depending on the stage of the surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/256—User interfaces for surgical systems having a database of accessory information, e.g. including context sensitive help or scientific articles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0818—Redundant systems, e.g. using two independent measuring systems and comparing the signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
- A61B8/565—Details of data transmission or power supply involving data transmission via a network
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Robotics (AREA)
- Urology & Nephrology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Human Computer Interaction (AREA)
- Physiology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
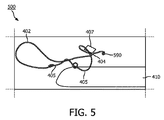
臨床医が装置を操縦し手術部位において治療を実施しようとするときには、適切な治療を保証するために、多数のビューポイントから周囲の手術部位を見る必要がある。例えば、最適な画像品質を得るために、利得、圧縮、コントラスト、深度などの超音波設定及び/又はパラメータをビューごとに調整する必要がある。本発明のシステムの実施形態は、超音波法とOSS法の組合せを組み込んで、超音波設定の記録及び呼び出しの際に、以下の変形実施形態を用いて臨床医を支援することができる。ユーザがコマンドを開始する(例えばボタンをクリックする)と、システムは、関連する全ての超音波設定(例えばパラメータ)を、例えばOSSによる関連プローブ位置及び/又は向きとともに読み取り、記憶する。本発明のシステムの実施形態によれば、これらの設定は次いで、保存されたビューを臨床医が後に復元することができるように呼び出される。システムはさらに、1つ又は複数のビューに対する適切な位置及び/又は向きを示す仮想の超音波プローブのオーバレイを、例えば関心のエリアの記憶された画像の上に生成する。
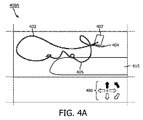
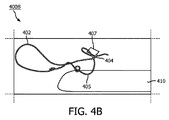
外科的手技は、共通の解剖学的ビューポイントの獲得を必然的に伴う。特定の外科的手技中に超音波プローブを追跡するOSS法の組合せは以下のように利用される。システムは、超音波プローブが所望のビューに(例えば適切な位置及び/又は向きに)あるかどうかを、OSS法を使用して超音波プローブを追跡することによって判定する。(例えば所望のビューにおいて)所望の超音波プローブ位置及び/又は向きが自動検出されると、システムは、(臨床医などの)ユーザにそのことを通知し、ユーザが超音波設定及び/又はパラメータを手動で調整することを提供する。このような通知が可能なのは、OSS法が患者の解剖学的構造に対して位置合せされており、多くの場合に、所望のビューが演繹的に分かっているためである。次いで、本明細書で論じたとおり、それぞれのビューに対するパラメータ及び/又は設定の完全セットと対応する超音波情報とが、プロセス・ワークフローのビュー・ライブラリとしてシステムのメモリに記憶され、続いてプロセス・ワークフロー中に呼び出される。さらに、本発明のシステムの実施形態では、プロセス・ワークフローに対する記憶された所望の標準的なビューが、拡張現実視覚的表現として表示され、将来のプロセス・ワークフロー中に手術シーンの適切な評価のために集められる全てのビュー(例えば単一の画像にまとめられた複数のビュー又は他のやり方で適切な解剖学的位置に配置された複数のビュー)をユーザに示すことが想定される。実施形態によれば、それらのビューは、手技ワークフローに従った順序で提示され、且つ/又は要望に応じて順序づけ/再順序づけされる。
1つ又は複数の実施形態によれば、外科的手技を実行するために望まれる/必要なビューを獲得するために超音波プローブをどこにおくべきかをユーザ(例えば臨床医など)に示すため、プローブの仮想オーバレイが表現される。例えば、超音波プローブの連続した1つ又は複数の部分(例えばプローブの全体までの部分又は挿入された部分)の形状を表現し、それによって、所望の1つ又は複数のビューを獲得するために超音波プローブの位置及び/又は向きをどのようにすべきかに関してより有益な情報をユーザに提供する。
a)語「備える(comprising)」は、所与の請求項に記載された要素又はステップ以外の要素又はステップの存在を排除しない。
b)要素の前の語「a」又は「an」は、そのような要素が複数存在することを排除しない。
c)請求項中の参照符号は、その請求項の範囲を限定しない。
d)同じアイテムによって、又はハードウェア若しくはソフトウェアで実施された同じ構造若しくは機能によって、いくつかの「手段」が表現されることがある。
e)開示された要素は、ハードウェア部分(例えば別々の電子回路及び集積電子回路を含む)、ソフトウェア部分(例えばコンピュータ・プログラミング)、及びこれらの任意の組合せからなることがある。
f)ハードウェア部分は、アナログ部分とディジタル部分のうちの一方又は両方からなることがある。
g)特段の記載なしに、開示された装置又は開示された装置の部分が、一体に結合されたり、又はさらなる部分に分割されたりすることがある。
h)特段の言及がない限り、ステップ又はステップの特定の順序が必須となることは意図されていない。
i)用語「複数の」要素は、記載された2つ以上の要素を含み、特定の要素数範囲を暗示しない。すなわち、複数の要素は、2つの要素でしかなくてもよく、計り知れない数の要素を含んでもよい。
j)用語「及び/又は」並びにその形式素は、特許請求の範囲及び本発明のシステムの1つ又は複数の実施形態に従って、列挙された要素のうちの1つ又は複数の要素だけがシステム内に適切に存在すればよいことを意味すると理解すべきである。
Claims (15)
- メモリと、表現装置と、超音波プローブと、前記超音波プローブに関連づけられた形状感知装置であって前記超音波プローブに対して所定の位置及び向きを有する形状感知装置と、前記メモリ、前記表現装置及び前記形状感知装置に結合されたコントローラとを含む外科用誘導システムであって、前記コントローラは、
前記超音波プローブの場所及び向きのうちの少なくとも一方を、前記形状感知装置から受信した位置センサ情報に基づいて決定し、
前記メモリに記憶されたワークフローの複数のビューの中から1つのビューを選択し、
選択されたビューに対するビュー設定情報であって、それぞれのビューに対する前記超音波プローブの位置及び向きのうちの少なくとも一方とパラメータとを含む前記ビュー設定情報を前記メモリから取得し、
前記超音波プローブの決定された場所及び向きと前記選択されたビューに対する前記超音波プローブの位置及び向きのうちの前記少なくとも一方との比較に基づいて、誘導情報を決定し、
決定された前記誘導情報を前記表現装置上に表現し、前記選択されたビューに対する前記ビュー設定情報の前記パラメータに基づいて超音波プローブ・パラメータを設定する、
外科用誘導システム。 - 前記形状感知装置は、少なくとも1つの位置センサを備えていて、前記コントローラはさらに、前記少なくとも1つの位置センサに問い合わせて前記位置センサ情報を取得し、前記位置センサ情報は、ワークスペースに対する前記少なくとも1つの位置センサの位置及び向きのうちの少なくとも一方を示す、請求項1に記載の外科用誘導システム。
- 前記コントローラはさらに、決定された前記誘導情報を、前記選択されたビューに対する前記超音波プローブの位置及び向きのうちの少なくとも一方まで前記超音波プローブを誘導するための方向指示として表現する、請求項1に記載の外科用誘導システム。
- 前記コントローラはさらに、前記ワークフローの前記複数のビューのうちの2つ以上のビューを前記表現装置上に同時に表示する、請求項1に記載の外科用誘導システム。
- 前記コントローラはさらに、前記2つ以上のそれぞれのビューに対する指示を前記表現装置上に表示する、請求項4に記載の外科用誘導システム。
- 前記コントローラはさらに、前記2つ以上のビューを、前記2つ以上のビューが解剖学的に配置された単一のビューとして前記表現装置上に表示する、請求項4に記載の外科用誘導システム。
- 設定された前記超音波プローブ・パラメータを使用して超音波画像情報を取得するために、前記コントローラが、前記超音波プローブの少なくとも1つの変換器に結合されている、請求項1に記載の外科用誘導システム。
- 前記コントローラはさらに、設定された前記超音波プローブ・パラメータに従う前記超音波画像情報に基づいて画像を再構成する、請求項7に記載の外科用誘導システム。
- 前記コントローラはさらに、前記選択されたビューに関連した前記超音波プローブの現在のパラメータ、場所、向き及び超音波情報のうちの2つ以上を関連づけて、記憶する、請求項1に記載の外科用誘導システム。
- 前記コントローラはさらに、前記複数のビューのうちのどのビューが、決定された前記超音波プローブの場所及び向きのうちの少なくとも一方に最も近いのかを判定し、最も近いと判定されたビューに基づいてビューを選択する、請求項1に記載の外科用誘導システム。
- 超音波情報を取得するために超音波プローブを誘導する方法であって、前記方法は、少なくとも1つのコントローラによって実行され、
前記超音波プローブの場所及び向きのうちの少なくとも一方を位置センサ情報に基づいて決定するステップと、
メモリに記憶されたワークフローの複数のビューの中から1つのビューを選択するステップと、
選択されたビューに対するビュー設定情報であって、それぞれのビューに対する前記超音波プローブの位置及び向きのうちの前記少なくとも一方とパラメータとに関する情報を含むビュー設定情報を取得するステップと、
前記超音波プローブの場所及び向きと前記選択されたビューに対する前記超音波プローブの位置及び向きのうちの前記少なくとも一方との比較に基づいて、誘導情報を決定するステップと、
決定された前記誘導情報を出力し、前記選択されたビューに対する前記ビュー設定情報の前記パラメータに基づいて超音波プローブ・パラメータを設定するステップとを有する、
方法。 - プロセッサによって実行されたときに、
超音波プローブの場所及び向きのうちの少なくとも一方を位置センサ情報に基づいて決定するステップと、
ワークフローの位置合せされた少なくとも1つのビューの中から1つのビューを選択するステップと、
選択されたビューに対するビュー設定情報であって、位置合せされたそれぞれのビューに対するパラメータ及びそれぞれのビューに対する前記超音波プローブの位置及び向きのうちの少なくとも一方に関する情報を含むビュー設定情報を取得するステップと、
前記超音波プローブの場所及び向きと前記選択されたビューに対する前記超音波プローブの位置及び向きのうちの前記少なくとも一方との比較に基づいて、誘導情報を決定するステップと、
決定された前記誘導情報を出力し、前記選択されたビューに対する前記ビュー設定情報の前記パラメータに基づいて超音波プローブ・パラメータを設定するステップとを
実施するためのコンピュータ命令を含む、非一時的コンピュータ可読媒体。 - 前記プロセッサはさらに、形状感知装置の少なくとも1つの位置センサに問い合わせて前記位置センサ情報を取得するステップを実施し、前記位置センサ情報が、ワークスペースに対する前記少なくとも1つの位置センサの位置及び向きのうちの少なくとも一方を示す、請求項12に記載の非一時的コンピュータ可読媒体。
- 前記プロセッサはさらに、前記ワークフローの複数のビューのうちの2つ以上のビューを同時に表示するステップを実施する、請求項12に記載の非一時的コンピュータ可読媒体。
- 前記プロセッサはさらに、前記複数のビューのうちの前記2つ以上のビューを、前記2つ以上のビューが解剖学的に配置された単一のビューとして同時に表示するステップを実施する、請求項14に記載の非一時的コンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662356566P | 2016-06-30 | 2016-06-30 | |
| US62/356,566 | 2016-06-30 | ||
| PCT/EP2017/065946 WO2018002109A1 (en) | 2016-06-30 | 2017-06-28 | Medical navigation system employing optical position sensing and method of operation thereof |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019521768A JP2019521768A (ja) | 2019-08-08 |
| JP2019521768A5 JP2019521768A5 (ja) | 2020-08-06 |
| JP6907247B2 true JP6907247B2 (ja) | 2021-07-21 |
Family
ID=59337632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018568808A Active JP6907247B2 (ja) | 2016-06-30 | 2017-06-28 | 光学的位置感知を使用する医療用ナビゲーション・システム及びその操作方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11224405B2 (ja) |
| EP (1) | EP3478207B1 (ja) |
| JP (1) | JP6907247B2 (ja) |
| CN (1) | CN109982656B (ja) |
| WO (1) | WO2018002109A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| US11534138B2 (en) * | 2017-09-07 | 2022-12-27 | Piur Imaging Gmbh | Apparatus and method for determining motion of an ultrasound probe |
| US20200359997A1 (en) * | 2018-02-08 | 2020-11-19 | Koninklijke Philips N.V. | Wireless operation for transesophageal echocardiography |
| KR20200136931A (ko) * | 2018-03-01 | 2020-12-08 | 아우리스 헬스, 인코포레이티드 | 매핑 및 내비게이션을 위한 방법 및 시스템 |
| CN112135566B (zh) * | 2018-05-18 | 2024-10-22 | 富士胶片株式会社 | 超声波系统及超声波系统的控制方法 |
| EP3890642A2 (en) | 2018-12-03 | 2021-10-13 | 3mensio Medical Imaging B.V. | Method, device and system for intracavity probe procedure planning |
| US20220000448A1 (en) * | 2019-02-04 | 2022-01-06 | Google Llc | Instrumented Ultrasound Probes For Machine-Learning Generated Real-Time Sonographer Feedback |
| CN113490465B (zh) | 2019-02-28 | 2024-12-31 | 皇家飞利浦有限公司 | 用于机器学习模型的训练数据收集 |
| CN110313939B (zh) * | 2019-08-01 | 2020-12-11 | 无锡海斯凯尔医学技术有限公司 | 组织感兴趣区域定位方法、装置、设备及存储介质 |
| US12263033B2 (en) * | 2019-11-12 | 2025-04-01 | Biosense Webster (Israel) Ltd. | Historical ultrasound data for display of live location data |
| US11419585B2 (en) * | 2019-11-18 | 2022-08-23 | GE Precision Healthcare LLC | Methods and systems for turbulence awareness enabled ultrasound scanning |
| JP7724407B2 (ja) | 2019-12-12 | 2025-08-18 | コーニンクレッカ フィリップス エヌ ヴェ | 超音波プローブをガイドするためのシステム及び方法 |
| EP3868303A1 (en) | 2020-02-18 | 2021-08-25 | Koninklijke Philips N.V. | Ultrasound guidance method and system |
| WO2021259739A1 (en) * | 2020-06-25 | 2021-12-30 | Koninklijke Philips N.V. | Adaptable user interface for a medical imaging system |
| CN114027875A (zh) * | 2021-11-17 | 2022-02-11 | 武汉联影医疗科技有限公司 | 超声探头及其组件、探头杯套、超声设备控制方法及系统 |
| EP4278981A1 (en) * | 2022-05-16 | 2023-11-22 | Koninklijke Philips N.V. | User guidance in ultrasound imaging |
| US20240108402A1 (en) * | 2022-10-03 | 2024-04-04 | Biosense Webster (Israel) Ltd. | Seamless switching between different modes of tissue ablation |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7597663B2 (en) * | 2000-11-24 | 2009-10-06 | U-Systems, Inc. | Adjunctive ultrasound processing and display for breast cancer screening |
| DE20106526U1 (de) | 2001-01-10 | 2001-08-02 | Aesculap AG & Co. KG, 78532 Tuttlingen | Chirurgische Vorrichtung |
| EP2289452A3 (en) * | 2005-06-06 | 2015-12-30 | Intuitive Surgical Operations, Inc. | Laparoscopic ultrasound robotic surgical system |
| JP5127371B2 (ja) * | 2007-08-31 | 2013-01-23 | キヤノン株式会社 | 超音波画像診断システム、及びその制御方法 |
| US8183520B2 (en) | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
| BR112012013706B1 (pt) | 2009-12-09 | 2021-10-13 | Koninklijke Philips N.V. | Método para o processamento de uma imagem de raios x e sistema para uma combinação de imagens de ultrassom e raios x |
| RU2589625C2 (ru) | 2010-02-09 | 2016-07-10 | Конинклейке Филипс Электроникс Н.В. | Устройство, система и способ для визуализации и лечения с использованием оптического определения положения |
| EP2668466B1 (en) | 2011-01-28 | 2021-08-11 | Koninklijke Philips N.V. | Optical shape sensing system with reference markers for launch point identification |
| CN104470419B (zh) * | 2012-07-09 | 2018-08-17 | 皇家飞利浦有限公司 | 用于自适应图像引导的介入的方法和系统 |
| CN106562757B (zh) * | 2012-08-14 | 2019-05-14 | 直观外科手术操作公司 | 用于多个视觉系统的配准的系统和方法 |
| WO2014053934A1 (en) | 2012-10-01 | 2014-04-10 | Koninklijke Philips N.V. | System and method for registering shape sensing with imaging using an optimal plane |
| US20140121489A1 (en) | 2012-10-31 | 2014-05-01 | General Electric Company | Medical imaging system and a portable medical imaging device for performing imaging |
| US20140188440A1 (en) * | 2012-12-31 | 2014-07-03 | Intuitive Surgical Operations, Inc. | Systems And Methods For Interventional Procedure Planning |
| EP4049706A1 (en) * | 2013-03-15 | 2022-08-31 | Intuitive Surgical Operations, Inc. | Shape sensor systems for tracking interventional instruments and methods of use |
| CN105338906B (zh) * | 2013-06-28 | 2019-06-14 | 皇家飞利浦有限公司 | 到超声图像中的形状注入以实时校准波束样式 |
| WO2015010859A1 (en) | 2013-07-23 | 2015-01-29 | Koninklijke Philips N.V. | Registration system for registering an imaging device with a tracking device |
| EP3041409A1 (en) | 2013-09-06 | 2016-07-13 | Koninklijke Philips N.V. | Navigation system |
| JP6706576B2 (ja) * | 2013-12-17 | 2020-06-10 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 最小侵襲性のインターベンションのための形状センスされるロボット超音波 |
| CN104739508B (zh) * | 2013-12-31 | 2017-04-12 | 上海西门子医疗器械有限公司 | 一种运动部件的运动位置的设置方法及系统、医疗设备 |
| EP3096705A1 (en) * | 2014-01-24 | 2016-11-30 | Koninklijke Philips N.V. | Robotic control of imaging devices with optical shape sensing |
| JP6365121B2 (ja) * | 2014-08-28 | 2018-08-01 | コニカミノルタ株式会社 | 超音波探触子及び超音波診断装置 |
| US10646199B2 (en) * | 2015-10-19 | 2020-05-12 | Clarius Mobile Health Corp. | Systems and methods for remote graphical feedback of ultrasound scanning technique |
-
2017
- 2017-06-28 CN CN201780040597.4A patent/CN109982656B/zh active Active
- 2017-06-28 JP JP2018568808A patent/JP6907247B2/ja active Active
- 2017-06-28 WO PCT/EP2017/065946 patent/WO2018002109A1/en not_active Ceased
- 2017-06-28 US US16/305,917 patent/US11224405B2/en active Active
- 2017-06-28 EP EP17739499.6A patent/EP3478207B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11224405B2 (en) | 2022-01-18 |
| WO2018002109A1 (en) | 2018-01-04 |
| US20200323514A1 (en) | 2020-10-15 |
| EP3478207B1 (en) | 2023-08-09 |
| EP3478207A1 (en) | 2019-05-08 |
| JP2019521768A (ja) | 2019-08-08 |
| CN109982656A (zh) | 2019-07-05 |
| CN109982656B (zh) | 2022-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6907247B2 (ja) | 光学的位置感知を使用する医療用ナビゲーション・システム及びその操作方法 | |
| US20220096189A1 (en) | Image guided motion scaling for robot control | |
| US10646290B2 (en) | System and method for configuring positions in a surgical positioning system | |
| JP6960939B2 (ja) | 超音波システム及び非一時的コンピュータ可読媒体 | |
| US11547318B2 (en) | Medical navigation system using shape-sensing device and method of operation thereof | |
| RU2667326C2 (ru) | Планирование траектории рамы с-типа для оптимального получения изображений в эндоскопической хирургии | |
| US20120271173A1 (en) | Automatic ultrasonic scanning system and scanning method thereof | |
| CN113116386B (zh) | 超声成像引导方法、超声设备及存储介质 | |
| US20100198402A1 (en) | Methods, devices, and systems for non-mechanically restricting and/or programming movement of a tool of a manipulator along a single axis | |
| RU2015110976A (ru) | Роботизированное устройство и системное программное обеспечение, аппаратное обеспечение и способы использования для хирургического вмешательства, направляемого по изображению и с применением робота | |
| WO2017076886A1 (en) | Determining a configuration of a medical robotic arm | |
| JP2018514352A (ja) | 後期マーカー配置による融合イメージベース誘導のためのシステムおよび方法 | |
| JP2004223128A (ja) | 医療行為支援装置および方法 | |
| JP2016522725A (ja) | 超音波画像の3d取得のためのシステムおよび方法 | |
| JP2017532131A (ja) | 介入治療内で器具を挿入する間の実時間の臓器区分化及び器具ナビゲーションのためのシステム、並びにその作動方法 | |
| JP2017532134A (ja) | 介入治療内で器具を挿入する間の実時間の臓器区分化及び器具ナビゲーションのためのシステム、並びにその作動方法 | |
| CN113116384A (zh) | 超声扫查引导方法、超声设备及存储介质 | |
| US11141859B2 (en) | Determining a configuration of a medical robotic arm | |
| CN113129342A (zh) | 多模态融合成像方法、装置及存储介质 | |
| CN113520425A (zh) | 医学成像系统、介入系统及其控制方法 | |
| US20180249953A1 (en) | Systems and methods for surgical tracking and visualization of hidden anatomical features | |
| CN119257733A (zh) | 一种手术机器人规划导航方法、装置、设备和存储介质 | |
| JP2025501966A (ja) | 3次元モデル再構成 | |
| KR20210094913A (ko) | 초음파 진단 장치 및 이에 의한 초음파 영상의 관리 방법 | |
| US20230210627A1 (en) | Three-dimensional instrument pose estimation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200626 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200626 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210528 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210601 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210630 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6907247 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |