JP6895680B2 - Crop lodging evaluation device and crop lodging evaluation method - Google Patents
Crop lodging evaluation device and crop lodging evaluation method Download PDFInfo
- Publication number
- JP6895680B2 JP6895680B2 JP2017040838A JP2017040838A JP6895680B2 JP 6895680 B2 JP6895680 B2 JP 6895680B2 JP 2017040838 A JP2017040838 A JP 2017040838A JP 2017040838 A JP2017040838 A JP 2017040838A JP 6895680 B2 JP6895680 B2 JP 6895680B2
- Authority
- JP
- Japan
- Prior art keywords
- lodging
- degree
- speed
- harvesting
- crop
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011156 evaluation Methods 0.000 title claims description 25
- 238000003306 harvesting Methods 0.000 claims description 78
- 238000012545 processing Methods 0.000 claims description 71
- 238000000034 method Methods 0.000 claims description 39
- 238000003860 storage Methods 0.000 claims description 36
- 238000001914 filtration Methods 0.000 claims description 13
- 238000005259 measurement Methods 0.000 claims description 11
- 238000009313 farming Methods 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 28
- 235000013339 cereals Nutrition 0.000 description 11
- 238000004364 calculation method Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 239000003337 fertilizer Substances 0.000 description 6
- 238000013500 data storage Methods 0.000 description 5
- 241000209094 Oryza Species 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000004720 fertilization Effects 0.000 description 4
- 238000007726 management method Methods 0.000 description 4
- 238000012935 Averaging Methods 0.000 description 3
- 235000007164 Oryza sativa Nutrition 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 235000009566 rice Nutrition 0.000 description 3
- 239000002689 soil Substances 0.000 description 3
- 230000002411 adverse Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000033001 locomotion Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 241000196324 Embryophyta Species 0.000 description 1
- 241000209140 Triticum Species 0.000 description 1
- 235000021307 Triticum Nutrition 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000012272 crop production Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000035558 fertility Effects 0.000 description 1
- 244000037666 field crops Species 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012946 outsourcing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
Images










Landscapes
- Combines (AREA)
- Harvester Elements (AREA)
Description
本発明は、作物の倒伏度評価技術に関する。 The present invention relates to a technique for evaluating the degree of lodging of a crop.
作物生産においては、高品質で高い収量を得ることが目標となる。農作物などの倒伏は収穫の作業性、収量、品質を低下させるため、倒伏させない栽培管理が必要である。 In crop production, the goal is to obtain high quality and high yield. Since lodging of agricultural products reduces the workability, yield, and quality of harvesting, it is necessary to manage cultivation without lodging.
たとえば、稲作においては、大規模化に対応するため、機械メーカーで圃場区画毎の収量を自動で測定できるコンバインと、そのデータを地図化するシステムが提供されており、収量の低かった圃場は翌年に施肥量を増やすなどの利用がなされている。 For example, in rice cultivation, in order to cope with the increase in scale, a machine manufacturer provides a combine that can automatically measure the yield of each field plot and a system that maps the data, and the field with low yield will be the next year. It is used to increase the amount of fertilizer applied.
しかしながら、低収には倒伏によるものも含まれており、その場合には、むしろ施肥量を減らす必要がある。また、多収であっても倒伏している場合には、同様に施肥量を減らす必要がある。従来、倒伏程度(以下、「倒伏度」と称する。)を自動的に記録できる技術は少なかった。 However, low yields include those due to lodging, in which case it is rather necessary to reduce the amount of fertilizer applied. In addition, even if the yield is high, if the crop is lying down, it is necessary to reduce the amount of fertilizer applied as well. Conventionally, there have been few techniques that can automatically record the degree of lodging (hereinafter referred to as "degree of lodging").
圃場内の倒伏箇所は高空からの空撮等により把握することは可能ではあるが、倒伏箇所の倒伏度は分かりにくく、倒伏箇所の緯度、経度が分からないため、GPS搭載作業機の作業に応用することは難しい。 Although it is possible to grasp the lodging point in the field by aerial photography from a high altitude, etc., the degree of lodging of the lodging point is difficult to understand, and the latitude and longitude of the lodging point are unknown, so it is applied to the work of GPS-equipped work machines. It's difficult to do.
倒伏度は、1枚の圃場内においても、場所によって異なることが普通である。従って、圃場単位の倒伏度を評価するためには、圃場全体を見て回る必要がある。 The degree of lodging usually varies from place to place even within a single field. Therefore, in order to evaluate the degree of lodging in each field, it is necessary to look around the entire field.
しかしながら、大区画圃場では全体を見るのに労力を要する上に、倒伏箇所の割合を正確に把握することは難しい。 However, in a large plot field, it takes a lot of labor to see the whole, and it is difficult to accurately grasp the ratio of the lodging points.
圃場毎の倒伏度が把握できると、収量データと合わせることにより、より的確に翌年の施肥設計等を行うことが可能となる。 If the degree of lodging for each field can be grasped, it will be possible to more accurately design fertilization for the next year by combining it with the yield data.
また、倒伏は基盤整備前の地形や土質のむら等に起因する地力むらの影響も受ける。そのようなデータ取得を目的として圃場内の収量分布が測定できる収量コンバインが研究用には開発されている。収量と同時に倒伏度の圃場内分布が把握できれば、GPS搭載施肥機を利用した可変施肥用のより適切な施肥地図が作成できる。 In addition, lodging is also affected by soil fertility unevenness caused by topographical and soil unevenness before infrastructure development. A yield combine that can measure the yield distribution in the field has been developed for research purposes for the purpose of acquiring such data. If the distribution of lodging in the field can be grasped at the same time as the yield, a more appropriate fertilization map for variable fertilization using a GPS-equipped fertilizer can be created.
例えば、特許文献1は、過去に蓄積された調査地域の画像や圃場の属性情報と、調査対象である圃場が撮影された空撮画像から、調査すべき実測圃場を選定するための判断基準となるパラメータ群を決定し、前記パラメータ群ができる限り分散を持つように、実測圃場を選定し、また調査の負担をできる限り減らすために、実測圃場の候補ができる限り位置的に集中するように選定する。また気象データの時系列パターンを生育ステージ毎に解析することにより、生育状況に相関のあるパラメータ群を算出し、画像特徴量、圃場の属性情報と前記パラメータ群を説明変数とした収量推計を実施するものである。
For example,
また、特許文献2、3は、穀秤センサを配置したコンバインを用い、倒伏を抽出する。穀秤センサは、超音波やレーザー光のビームで本機前方の穀稈を走査する発信部と、穀稈からの反射波や反射光を受信する受信部とを具備して、反射波や反射光の全体的なレベル変化や、ラスタ中のレベル変化や、穀稈と穀稈センサ間の距離等から、本機前方の穀稈が、直立しているか、全面に亘って倒伏しているか、一部倒伏しているかの植立状態や、前方の穀稈の有無を検知するようにしている。
Further, in
しかしながら、特許文献1は、収量を高精度に推定するものではあるが、倒伏度を考慮することはできなかった。
However, although
また、特許文献2、3は、反射波や反射光の全体的なレベル変化や、ラスタ中のレベル変化や、穀稈と穀稈センサ間の距離等から、本機前方の穀稈が、直立しているか、全面に亘って倒伏しているか、一部倒伏しているかの植立状態や、前方の穀稈の有無を光学センサ等により検知する。従って、高価なセンサを利用する必要がある。
Further, in
また、一般的な倒伏度の算出は、以下のように行っていた。
1)GPS付きデジタルカメラ等による空撮写真からデジタル標高図を作成する。撮影地点の異なる空撮写真を複数枚準備し、デジタル標高図作成ソフトウエアを用いて撮影地点の位置情報と画像のずれから圃場の標高図を作成する。
2)デジタルカメラにより空撮を行う。例えば、デジタルカメラをドローンに搭載して圃場全体の空撮写真を撮影する。
3)例えば、収穫中のコンバインの後ろ歩いてGPS付きデジタルカメラで倒伏状況と位置を記録し、圃場内の場所毎の倒伏度のデータを作成する。
4)達観:圃場の外周と内部を歩き、倒伏度別に面積割合を達観で評価する。倒伏度×面積割合を合計して圃場の倒伏度を算出する。
5)その他、特許文献2、3のように、コンバインに取り付けた光学センサにより収穫しながら倒伏度地図を作成する方法がある。
In addition, the general calculation of the degree of lodging was performed as follows.
1) Create a digital elevation map from aerial photographs taken with a digital camera with GPS. Prepare multiple aerial photographs with different shooting points, and create an elevation map of the field from the position information of the shooting points and the deviation of the images using digital elevation map creation software.
2) Take aerial shots with a digital camera. For example, a digital camera is mounted on the drone to take aerial photographs of the entire field.
3) For example, walk behind the combine harvester, record the lodging situation and position with a digital camera with GPS, and create data on the degree of lodging for each location in the field.
4) Perspective: Walk around the perimeter and inside of the field, and evaluate the area ratio according to the degree of lodging. The degree of lodging of the field is calculated by summing the degree of lodging x the area ratio.
5) In addition, as in
しかしながら、従来の技術には以下のような問題点がある。
1)20cm程度の高さの違いを測定できるデジタル標高図作成のための空撮写真の取得にはドローンなどの高額な機器と技術と作業時間、あるいは委託する場合は料金が必要となる。デジタル標高図を作成するためには高額な専用ソフトが必要である上に手作業もあるため技術と作業時間が必要である。自動化と圃場管理システムへの追加は難しい。
2)ドローンとその操作技術が必要となる。例えば、1圃場当たり5分から10分の撮影時間が必要となる。
空撮写真から倒伏箇所は分かるものの、倒伏度は分からない。また、倒伏箇所の位置情報を得ることが難しい。写真の加工や整理に時間を要する。自動化と圃場管理システムへの追加は難しい。
3)長時間歩いて写真を撮影する必要がある。倒伏の向きによっては写真に基づく倒伏度の判断が難しい。写真から倒伏度を判断するため自動化と圃場管理システムへの追加は難しい。
4)精度を上げるためには圃場をくまなく歩く必要があり、労力がかかる。倒伏度別面積割合の達観評価が難しいため、精度を上げることが難しい。自動化と圃場管理システムへの追加は難しい。
5)高価な光学センサ等が必要になる。
However, the conventional technique has the following problems.
1) To obtain an aerial photograph for creating a digital elevation map that can measure a difference in height of about 20 cm, expensive equipment such as a drone, technology and work time, or a fee is required when outsourcing. In order to create a digital elevation map, expensive dedicated software is required and there is also manual work, so technology and work time are required. Difficult to automate and add to field management systems.
2) A drone and its operation technology are required. For example, a shooting time of 5 to 10 minutes is required for each field.
Although the aerial photograph shows the location of the lodging, the degree of lodging is not known. In addition, it is difficult to obtain the position information of the lodging location. It takes time to process and organize photos. Difficult to automate and add to field management systems.
3) It is necessary to walk for a long time and take a picture. Depending on the direction of lodging, it is difficult to judge the degree of lodging based on photographs. It is difficult to automate and add to the field management system because the degree of lodging is judged from the photograph.
4) In order to improve the accuracy, it is necessary to walk all over the field, which is laborious. It is difficult to improve the accuracy because it is difficult to evaluate the area ratio according to the degree of lodging. Difficult to automate and add to field management systems.
5) An expensive optical sensor or the like is required.
本発明は、農作物の倒伏度を評価するための精度を上げることを目的とする。また、倒伏度を評価するための、コストを下げることを目的とする。 An object of the present invention is to improve the accuracy for evaluating the degree of lodging of agricultural products. It also aims to reduce the cost of evaluating the degree of lodging.
本発明の一観点によれば、位置測定部を備えた収穫用農機を利用した作物の倒伏度評価装置であって、前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得部と、予め求めておいた前記収穫用農機の速度の基準値に基づいて、前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理部と、を有することを特徴とする作物の倒伏度評価装置が提供される。 According to one aspect of the present invention, it is a crop lodging degree evaluation device using a harvesting agricultural machine provided with a position measuring unit, and a position at which the speed of the harvesting agricultural machine is acquired at the position measured by the position measuring unit. It has a separate speed data acquisition unit and a standardization processing unit that standardizes the speed of the harvesting farming machine based on a previously obtained reference value for the speed of the harvesting farming machine and uses it as an index of the degree of lodging of the crop. A crop lodging degree evaluation device characterized by this is provided.
標準化した収穫速度そのものを倒伏の評価指標とすることができる。
前記標準化処理部により標準化された前記収穫用農機の速度と、予め求めておいた前記収穫用農機の標準化された速度と作物の倒伏度との関係と、に基づいて、作物の倒伏度を推定する倒伏度推定部と、を有することを特徴とする。
The standardized harvest rate itself can be used as an evaluation index for lodging.
The crop lodging degree is estimated based on the relationship between the speed of the harvesting agricultural machine standardized by the standardization processing unit, the standardized speed of the harvesting farm machine obtained in advance, and the crop lodging degree. It is characterized by having an lodging degree estimation unit.
さらに、前記位置別速度データ取得部により取得した位置別速度データを、前記収穫用農機の速度の上限、下限および進行方向に基づいて除外するフィルタリング処理部を有することを特徴とする。 Further, it is characterized by having a filtering processing unit that excludes the position-specific speed data acquired by the position-specific speed data acquisition unit based on the upper limit, the lower limit, and the traveling direction of the speed of the harvesting agricultural machine.
収穫用農機の収穫速度の上限、常識的な収穫速度の下限を超えているデータは正常な収穫作業の速度で無いと推定される。また、進行方向が、例えば、畔と平行ではない方向である場合には、収穫を行っていないと推定してそのデータを除外する。 It is presumed that the data that exceeds the upper limit of the harvest rate of the harvesting agricultural machine and the lower limit of the common sense harvest rate is not the normal harvesting speed. Further, when the traveling direction is, for example, a direction not parallel to the shore, it is estimated that the harvest is not performed and the data is excluded.
前記収穫用農機の速度の基準値は、倒伏していない圃場または倒伏していない箇所における前記収穫用農機の速度の平均値に基づいて求めることを特徴とする。 The reference value of the speed of the harvesting agricultural machine is obtained based on the average value of the speed of the harvesting farm machine in the non-falling field or the non-falling part.
収穫用農機の速度の基準値で速度を標準化することにより、収穫用農機や作業者による差の影響を除外することができる。 By standardizing the speed with the reference value of the speed of the harvesting farm machine, the influence of the difference between the harvesting farm machine and the worker can be excluded.
前記倒伏度推定部は、前記収穫用農機の標準化された速度と作物の倒伏度との複数の圃場のそれぞれにおける関係に基づいて倒伏度を推定する。 The lodging degree estimation unit estimates the lodging degree based on the relationship between the standardized speed of the harvesting agricultural machine and the lodging degree of the crop in each of the plurality of fields.
無倒伏圃場あるいは無倒伏箇所のみの速度の統計値に基づいて前記収穫用農機の速度の基準値を求めれば、倒伏度を精度良く推定することができる。 The degree of lodging can be estimated accurately by obtaining the reference value of the speed of the harvesting agricultural machine based on the statistical value of the speed of the non-falling field or the non-falling part only.
前記倒伏度推定部は、前記収穫用農機の標準化された速度と作物の倒伏度との位置別の関係に基づいて倒伏度を推定する。 The lodging degree estimation unit estimates the lodging degree based on the positional relationship between the standardized speed of the harvesting agricultural machine and the lodging degree of the crop.
また、本発明は、位置測定部を備えた収穫用農機を利用した作物の倒伏度評価方法であって、前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得ステップと、予め求めておいた前記収穫用農機の速度の基準値に基づいて、前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理ステップと、を有することを特徴とする作物の倒伏度評価方法である。 Further, the present invention is a method for evaluating the degree of lodging of a crop using a harvesting agricultural machine provided with a position measuring unit, and position-specific speed data for acquiring the speed of the harvesting agricultural machine at the position measured by the position measuring unit. It is characterized by having an acquisition step and a standardization processing step of standardizing the speed of the harvesting farming machine based on a predetermined reference value of the speed of the harvesting farming machine and using it as an index of the degree of lodging of the crop. This is a method for evaluating the degree of lodging of the crop.
前記標準化処理部により標準化された前記収穫用農機の速度と、予め求めておいた前記収穫用農機の標準化された速度と作物の倒伏度との関係と、に基づいて、作物の倒伏度を推定する倒伏度推定ステップと、を有することを特徴とする。 The crop lodging degree is estimated based on the relationship between the speed of the harvesting agricultural machine standardized by the standardization processing unit, the standardized speed of the harvesting farm machine obtained in advance, and the crop lodging degree. It is characterized by having a lodging degree estimation step.
前記倒伏度推定ステップは、前記収穫用農機の標準化された速度と作物の倒伏度との位置別の関係に基づいて、作物の倒伏度を求めることが好ましい。 In the lodging degree estimation step, it is preferable to obtain the lodging degree of the crop based on the positional relationship between the standardized speed of the harvesting agricultural machine and the lodging degree of the crop.
各圃場の頂点の緯度、経度を指定して圃場の範囲を定義しておき、位置と速度と方向とからなるGPSによる位置別速度データがどの圃場で取得されたものか自動的に判別するステップと、判別後のデータに圃場のデータを追加するステップと、前記圃場のデータが追加されたデータに基づいて、圃場毎の平均あるいは地点別の倒伏度を推定するようにしても良い。 A step that defines the range of the field by specifying the latitude and longitude of the apex of each field, and automatically determines in which field the GPS position-specific speed data consisting of the position, speed, and direction was acquired. Then, based on the step of adding the field data to the data after discrimination and the data to which the field data is added, the average of each field or the degree of lodging for each point may be estimated.
前記倒伏度推定ステップにより求めた圃場平均の倒伏度を、前記予め求めておいた前記収穫用農機の標準化された速度と作物の倒伏度との関係にさらに反映させるステップを有することを特徴とする。 It is characterized by having a step of further reflecting the field average lodging degree obtained by the lodging degree estimation step in the relationship between the standardized speed of the harvesting agricultural machine and the crop lodging degree obtained in advance. ..
本発明は、コンピュータに、上記のいずれか1に記載の倒伏度評価方法を実行させるためのプログラムであっても良い。 The present invention may be a program for causing a computer to execute the lodging degree evaluation method according to any one of the above.
本発明によれば、作物の倒伏度を評価するための精度を上げることができる。また、倒伏度を評価するための、コストを下げることができる。 According to the present invention, the accuracy for evaluating the lodging degree of a crop can be improved. In addition, the cost for evaluating the degree of lodging can be reduced.
以下に本発明の実施の形態による倒伏度の評価技術について図面を参照しながら詳細に説明する。 Hereinafter, the technique for evaluating the degree of lodging according to the embodiment of the present invention will be described in detail with reference to the drawings.
(第1の実施の形態)
まず、本発明の第1の実施の形態について説明する。図1(a)は、本実施の形態による収穫用農機、例えばコンバインの一構成例を示す機能ブロック図である。本実施の形態による、コンバインAには、一般的なコンバイン本体1と、GPSロガーなどの位置測定部3と、倒伏度を求めるためのデータ処理を行うデータ処理部5と、データ等を記憶する記憶部7とを有する。
(First Embodiment)
First, the first embodiment of the present invention will be described. FIG. 1A is a functional block diagram showing a configuration example of a harvesting agricultural machine according to the present embodiment, for example, a combine harvester. According to the present embodiment, the combine A stores a general combine
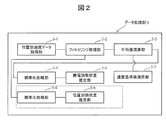
図2は、データ処理部5の一構成例を示す機能ブロック図である。図3(a)は、記憶部7の一構成例を示す機能ブロック図であり、図3(b)は、圃場毎の標準化速度と倒伏度との関係を示す図であり、図3(c)は、1つの圃場における位置毎の標準化速度と倒伏度との関係を示す図である。図4は、圃場における平均倒伏度を求める処理の流れを示すフローチャート図である。図5は、圃場平均の標準化されたコンバインの速度と倒伏度との関係を示す図である。図6は、倒伏度の判定基準と判定方法を示す図である。図7は、圃場別の推定倒伏度を示す図である。コンバインAの最速値を基準値として標準化した収穫速度から倒伏度を推定している。尚、図中の数値は目視による倒伏度の推定値である。
FIG. 2 is a functional block diagram showing a configuration example of the
図1(a)に示すように、本実施の形態によるコンバインAは、コンバイン本体1と、GPSなどの位置測定部3と、倒伏度などの演算処理等を行うデータ処理部5と、演算に用いるデータやデータ処理結果を格納する記憶部7と、を有している。
As shown in FIG. 1A, the combine A according to the present embodiment includes a combine
図2は、データ処理部5の一構成例を示す機能ブロック図である。図2に示すように、データ処理部5は、位置別速度データ取得部5−1と、フィルタリング処理部5−2と、平均値演算部5−3と、標準化処理部5−4と、圃場別倒伏度推定部5−5と、を有している。
尚、破線により囲んだ領域内の別構成については、第2の実施の形態においては説明する。
加えて、速度基準値演算部5−7を有している。
FIG. 2 is a functional block diagram showing a configuration example of the
The other configuration in the area surrounded by the broken line will be described in the second embodiment.
In addition, it has a speed reference value calculation unit 5-7.
図3(a)は、記憶部7の一構成例を示す機能ブロック図である。記憶部7は、位置別速度データ記憶部7−1と、フィルタリング条件記憶部7−2と、標準化処理条件記憶部7−3と、速度基準値記憶部7−4と、圃場別、位置別の標準化速度−倒伏度変換処理条件記憶部7−5と、圃場別、位置別の倒伏度記憶部7−6と、他圃場データ記憶部7−7と、を有している。
FIG. 3A is a functional block diagram showing a configuration example of the
図3(b)は、圃場別、位置別の倒伏度記憶部7−6に記憶される、圃場別のデータであり、図3(c)は、圃場の位置毎のデータである。 FIG. 3B is data for each field stored in the lodging degree storage unit 7-6 for each field and each position, and FIG. 3C is data for each position of the field.
図6は、倒伏度の判定基準と判定方法を示す図である。土壌31に、例えば稲穂35の付いた稲株33が植えられていると、おおよその傾きがθで表される。
FIG. 6 is a diagram showing a determination standard and a determination method for the degree of lodging. When, for example, a
ここで、倒伏度の判定を、図6の右上の表のように行うことができる。例えば、水田区画の倒伏度は、図6の右下の式に基づいて求めることができる。 Here, the degree of lodging can be determined as shown in the table on the upper right of FIG. For example, the degree of lodging of the paddy field section can be obtained based on the formula at the lower right of FIG.
図4は、データ処理部5が、圃場平均倒伏度を求める処理の流れを示すフローチャート図である。図5は、予め求めておいた、圃場平均の標準化されたコンバイン速度と倒伏度の関係を示す図である。図5の1点が圃場1枚に相当する。使用時には予め関係を求めておく。図5に示すように、標準化速度は倒伏度と図中の式で表されるような簡単な関数で示される相関があることがわかった。
FIG. 4 is a flowchart showing a flow of processing in which the
図4において、まず、圃場平均倒伏度を求める処理を開始する(Start)。ステップS1において、位置測定部(GPS)3が、コンバインの現在位置(x、y)を測定する。ステップS2において、位置別速度データ取得部5−1が、位置別の速度データを求める。GPS受信機を用いると、これらの処理を、同時に行うことができる。図4のように、これらの処理が独立して行われる構成でも良い。 In FIG. 4, first, the process of obtaining the average degree of lodging in the field is started (Start). In step S1, the position measuring unit (GPS) 3 measures the current position (x, y) of the combine. In step S2, the position-specific speed data acquisition unit 5-1 obtains the position-specific speed data. By using a GPS receiver, these processes can be performed at the same time. As shown in FIG. 4, a configuration in which these processes are performed independently may be used.
ステップS3において、フィルタリング処理部5−2が、フィルタリング条件記憶部7−2に記憶されているフィルタリング処理を行う。フィルタリング処理は、例えば、隅刈を排除するための下限速度に基づいて、その下限速度以下の速度データを以降の演算処理から排除する。また、収穫ではなく単なる移動を排除するための上限速度に基づいて、その上限速度以上の速度データを以降の演算処理から排除する。また、旋回動作を排除するために、進行方向が畦と平行でない速度データは排除する。ステップS3は、記録されたGPSデータから一般的な収穫作業時のデータのみを抜き出すため、速度上限、下限、進行方向によるフィルタリングを行うものである。 In step S3, the filtering processing unit 5-2 performs the filtering processing stored in the filtering condition storage unit 7-2. In the filtering process, for example, based on the lower limit speed for eliminating corner cutting, speed data equal to or lower than the lower limit speed is excluded from the subsequent arithmetic processing. In addition, based on the upper limit speed for eliminating mere movement rather than harvesting, speed data above the upper limit speed is excluded from the subsequent arithmetic processing. Further, in order to eliminate the turning motion, the velocity data whose traveling direction is not parallel to the ridge is excluded. In step S3, in order to extract only the data at the time of general harvesting work from the recorded GPS data, filtering is performed according to the speed upper limit, the lower limit, and the traveling direction.
ステップS4において、平均値演算部5−3が、フィルタリング処理後の圃場の速度データの平均値(統計値)を求める。 In step S4, the average value calculation unit 5-3 obtains the average value (statistical value) of the velocity data of the field after the filtering process.
一方、ステップS7において、他圃場データ記憶部7−7に記憶されている無倒伏圃場の圃場毎の平均値から、速度平均値を求めている。ステップS8において、速度基準値演算部5−7が、ステップS7で求めた無倒伏圃場あるいは無倒伏箇所の速度平均値から、標準化の速度基準値を求める。速度基準値は、例えば、最速値、最速5点の平均値などである。これを、速度基準値記憶部7−4に記憶する。 On the other hand, in step S7, the velocity average value is obtained from the average value for each field of the non-inverted field stored in the other field data storage unit 7-7. In step S8, the speed reference value calculation unit 5-7 obtains a standardized speed reference value from the speed average value of the non-falling field or the non-falling part obtained in step S7. The speed reference value is, for example, the fastest value, the average value of the fastest five points, and the like. This is stored in the speed reference value storage unit 7-4.
ステップS5において、標準化処理部5−4が、ステップS8で求めた基準値に基づいて、標準化処理条件記憶部7−3に記憶されている標準化処理条件、例えば、コンバイン種別差やオペレータ差を排除する処理を行う。 In step S5, the standardization processing unit 5-4 eliminates standardization processing conditions stored in the standardization processing condition storage unit 7-3, such as a combine type difference and an operator difference, based on the reference value obtained in step S8. Perform the processing to be performed.
ここでは、コンバイン機種やオペレータによる速度の違いの影響を少なくするため、基準圃場の収穫速度を算出し、その速度を用いて生データの標準化を行う。尚、倒伏以外の収穫速度への影響を除外するため、過湿圃場や濡れた作物、雑草多発生圃場などは適用条件から除外する。 Here, in order to reduce the influence of the difference in speed depending on the combine model and the operator, the harvesting speed of the reference field is calculated, and the raw data is standardized using the speed. In addition, in order to exclude the influence on the harvesting rate other than lodging, over-humidity fields, wet crops, weed-prone fields, etc. are excluded from the applicable conditions.
尚、このようにして標準化した収穫速度そのものを倒伏の評価指標とすることも可能である。求めた値を記憶部7に記憶しても良い。収量、品質は別の手段で把握するため、収穫の能率低下を測定することで倒伏の悪影響が全体的に把握できる。
It is also possible to use the harvest rate itself standardized in this way as an evaluation index for lodging. The obtained value may be stored in the
ステップS6において、倒伏度推定部5−5が、標準化速度−倒伏度変換処理条件記憶部7−5に記憶されている、図5に示すような、圃場平均の標準化されたコンバインの速度と倒伏度の関係、例えば図中の簡単な関係式に基づいて、標準化速度を倒伏度に変換する。変換したデータは、圃場別の倒伏度記憶部7−6に記憶される。
以上により、処理が終了する(End)。求めた値を記憶部7に記憶しても良い。
In step S6, the lodging degree estimation unit 5-5 stores the standardized speed-falling degree conversion processing condition storage unit 7-5, and the speed and lodging of the standardized combine of the field average as shown in FIG. Convert the standardized velocity to the degree of lodging based on the degree relationship, for example, the simple relational expression in the figure. The converted data is stored in the lodging degree storage unit 7-6 for each field.
As a result, the process ends (End). The obtained value may be stored in the
図7は、圃場毎の推定倒伏度を重ね合わせた空撮写真である。凡例に示すように、圃場毎の倒伏度を、上記の方法で求めた。一方、図7中に示される数値は、目視による倒伏度を示す。 FIG. 7 is an aerial photograph in which the estimated lodging degrees for each field are superimposed. As shown in the legend, the degree of lodging for each field was determined by the above method. On the other hand, the numerical value shown in FIG. 7 indicates the degree of lodging visually.
本実施の形態により求めた圃場毎の倒伏度は、目視による値と良い一致を示した。
このことから、本実施の形態による作物の倒伏度評価技術により、簡単かつ精度良く倒伏度を推定することができることがわかる。
The degree of lodging for each field determined by this embodiment showed good agreement with the visual value.
From this, it can be seen that the lodging degree can be estimated easily and accurately by the crop lodging degree evaluation technique according to the present embodiment.
尚、図1(b)は、図1(a)の変形例によるコンバインとサーバ装置とのシステム構成における一構成例を示す機能ブロック図である。 Note that FIG. 1B is a functional block diagram showing a configuration example in the system configuration of the combine and the server device according to the modification of FIG. 1A.
図1(b)に示すように、コンバイン本体1と、位置測定部3と、通信部9aと、をコンバインA側に設け、通信部9bと、データ処理部5と、記憶部7と、をサーバB側に設けても良い。通信部9aと通信部9bとにより、データのやり取りを行えば、遠隔でのデータ処理と、処理負荷の分散が可能である。また、サーバBが、複数のコンバインを一括管理するようにすることも可能である。
As shown in FIG. 1B, the combine
また、図1(c)に示すように、コンバイン本体1と、位置測定部3と、通信部9aと、第1の記憶部7aをコンバインA側に設け、通信部9bと、データ処理部5と、第2の記憶部7bと、をサーバB側に設けても良い。通信部9aと通信部9bとにより、データのやり取りを行えば、遠隔でのデータ処理と、処理負荷の分散が可能である。また、第1の記憶部7aでは、あるタイミングにおける位置と速度との関係を記憶しておき、あるタイミングで、サーバB側に記憶データを送って第2の記憶部7bに記憶させるようにしても良い。 尚、図5の関係は、図4に示すフローチャートの処理を繰り返し行う(ステップS6の結果を図5に反映させる)処理とすることにより、より精度が良くなる。
Further, as shown in FIG. 1 (c), the combine
(第2の実施の形態)
図2に示すように、本実施の形態では、標準化処理部5−4と、位置別倒伏度推定部5−6とを有する(破線で囲んだ領域内)。
(Second Embodiment)
As shown in FIG. 2, in the present embodiment, it has a standardization processing unit 5-4 and a position-specific lodging degree estimation unit 5-6 (within a region surrounded by a broken line).
図8は、本発明の第2の実施の形態による作物の倒伏度評価技術における処理の流れを示すフローチャート図である。ステップS11からステップS13までは、図4のステップS1からステップS3までと同様である。図4では、ステップS4で平均化処理を行うが、図8では平均化処理は行わない。また標準化処理に用いる速度基準値を求める際に、図4のステップS7、S8では、速度基準値演算部5−7が、無倒伏圃場の圃場毎の、あるいは無倒伏箇所の平均値から、速度基準値を求めている。 FIG. 8 is a flowchart showing a processing flow in the crop lodging degree evaluation technique according to the second embodiment of the present invention. Steps S11 to S13 are the same as steps S1 to S3 in FIG. In FIG. 4, the averaging process is performed in step S4, but in FIG. 8, the averaging process is not performed. Further, when obtaining the speed reference value to be used for the standardization process, in steps S7 and S8 of FIG. 4, the speed reference value calculation unit 5-7 performs the speed from the average value of each field of the non-falling field or the non-falling part. We are looking for a reference value.
本実施の形態では、位置別倒伏度推定部5−6は、ステップS15において圃場内での位置別の倒伏度を求める。 In the present embodiment, the position-based lodging degree estimation unit 5-6 obtains the position-based lodging degree in the field in step S15.
尚、速度上位の圃場の平均値は倒伏していない圃場の平均値であると期待できる。簡便法としては上位3圃場とか5圃場の平均値を使っても良い。 It should be noted that the average value of the fields with higher speeds can be expected to be the average value of the fields that have not collapsed. As a simple method, the average value of the top 3 fields or 5 fields may be used.
尚、図8でも、ステップS16において無倒伏圃場のデータ又は無倒伏箇所のデータから速度平均値を求め、それに基づいて、ステップS17において、速度基準値を求めている。
ステップS14において、ステップS17の速度基準値を基に、標準化処理を行う。
Also in FIG. 8, in step S16, the speed average value is obtained from the data of the non-falling field or the data of the non-falling part, and based on this, the speed reference value is obtained in step S17.
In step S14, standardization processing is performed based on the speed reference value in step S17.
尚、このようにして標準化した収穫速度そのものを倒伏の評価指標とすることも可能である。求めた値を記憶部7に記憶しても良い。収量、品質は別の手段で把握するため、収穫の能率低下を測定することで倒伏の悪影響が全体的に把握できる。
It is also possible to use the harvest rate itself standardized in this way as an evaluation index for lodging. The obtained value may be stored in the
次いで、図9に示すような、位置別の標準化されたコンバイン速度と位置別の倒伏度との関係に基づいて、標準化速度から倒伏度を求める。図9に示すように、標準化速度は倒伏度と図中の式で表されるような簡単な関数で示される相関があることがわかった。 Next, the lodging degree is obtained from the standardized speed based on the relationship between the standardized combine speed for each position and the lodging degree for each position as shown in FIG. As shown in FIG. 9, it was found that the standardization speed has a correlation between the degree of lodging and the simple function represented by the equation in the figure.
尚、図9は2枚の圃場で作成しているが、1枚の圃場データを用いても、複数の圃場データを用いても良い。図9の1点が圃場内の1地点のデータに対応する。同じ地点では刈り取りは1回しかできないため、すべて別の位置のデータである。 Although FIG. 9 is created with two fields, one field data may be used or a plurality of field data may be used. One point in FIG. 9 corresponds to the data of one point in the field. Since cutting can be done only once at the same point, all the data are at different positions.
図9のデータ数が多いのは、1地点あたりの調査労力が圃場1枚より少ないためであり、短い時間で多くの調査ができたことを示す。 The large number of data in FIG. 9 is due to the fact that the survey labor per site is less than one field, indicating that many surveys could be conducted in a short time.
尚、データのばらつきは、速度測定地点と倒伏度調査地点とが完全には一致していないことによると推定される。 It is presumed that the variation in the data is due to the fact that the velocity measurement point and the lodging degree survey point do not completely match.
ステップS15において、位置別倒伏度演算部5−7により、位置別の倒伏度を得ることができる。 In step S15, the position-specific lodging degree calculation unit 5-7 can obtain the position-specific lodging degree.
尚、図9の関係は、図8に示すフローチャートの処理を繰り返し行う(ステップS15の結果を図9に反映させる)処理とすることにより、より精度が良くなる。 The accuracy of the relationship shown in FIG. 9 can be improved by repeating the process of the flowchart shown in FIG. 8 (reflecting the result of step S15 in FIG. 9).
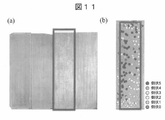
図10は、位置別の推定された倒伏度を重ね合わせた空撮写真である。矢印は、図11、図12の写真の位置を示す。 FIG. 10 is an aerial photograph in which the estimated lodging degrees for each position are superimposed. The arrows indicate the positions of the photographs of FIGS. 11 and 12.
図11(a)は、水田の可視画像の一例を示す図であり、色の薄い部分は倒伏度が高い部分である。図11(b)は、目視で調査した倒伏度を示す図である。倒伏度5が完全倒伏、倒伏度0が無倒伏である。図11(a)と図11(b)も良く一致していることがわかる。図12は、本実施の形態による位置別の推定倒伏度を示す図である。黄色枠で示した圃場は基準値を測定した圃場である。赤色枠で示した圃場は図11と同じ圃場である。 FIG. 11A is a diagram showing an example of a visible image of a paddy field, and a light-colored portion is a portion having a high degree of lodging. FIG. 11B is a diagram showing the degree of lodging visually investigated. A lodging degree of 5 is complete lodging, and a lodging degree of 0 is non-falling. It can be seen that FIGS. 11 (a) and 11 (b) are also in good agreement. FIG. 12 is a diagram showing an estimated lodging degree for each position according to the present embodiment. The fields shown in the yellow frame are the fields where the reference value was measured. The fields shown in red frames are the same fields as in FIG.
位置別の推定倒伏度(図12)は、空撮写真の倒伏部分(図11(a))やGPS付きデジタルカメラを利用して作成した倒伏地図(図11(b))とよく対応することがわかる。 The estimated lodging degree for each position (Fig. 12) should correspond well with the lodging part of the aerial photograph (Fig. 11 (a)) and the lodging map created using a digital camera with GPS (Fig. 11 (b)). I understand.
本実施の形態により求めた圃場毎の位置別の倒伏度は、目視等による実測値と良い一致を示した。 The degree of lodging for each position obtained by the present embodiment showed good agreement with the measured value by visual inspection or the like.
このことから、本実施の形態による作物の倒伏度評価技術により、簡単かつ精度良く位置別の倒伏度を推定することができることがわかる。 From this, it can be seen that the lodging degree for each position can be easily and accurately estimated by the crop lodging degree evaluation technique according to the present embodiment.
以上のことから、以下の利点が得られる。
1)作成された倒伏地図は水稲栽培農家が倒伏度を把握し、次年度の施肥設計に利用できる。将来的には収量地図と合わせることにより可変施肥装置の施肥地図作成にも利用できる。
2)また、自脱型コンバインを利用する麦類や普通型コンバインを利用する他の畑作物でも、倒伏箇所は収穫速度を落とすため、適用できると考えられる。
3)収量コンバインに搭載して圃場管理ソフトに組み込むことにより、自動的に倒伏地図を作成できるようになる。
From the above, the following advantages can be obtained.
1) The created lodging map can be used by paddy rice farmers to grasp the degree of lodging and use it for fertilization design for the next fiscal year. In the future, it can be used to create a fertilizer application map for variable fertilizer application equipment by combining it with a yield map.
2) In addition, it is considered that it can be applied to wheat that uses a head-feeding combine and other field crops that use a normal combine because the lodging point slows down the harvesting rate.
3) By mounting it on the yield combine and incorporating it into the field management software, it becomes possible to automatically create a lodging map.
課題としては、コンバインの刈り刃の高さ等の機械の状態も考慮することで推定精度をより高められると考えられる。 As an issue, it is considered that the estimation accuracy can be further improved by considering the state of the machine such as the height of the cutting blade of the combine.
(第3の実施の形態)
例えば、GISソフト等の圃場区画情報を利用して、自動的に圃場毎に倒伏度のデータを分けるようにしても良い。
(Third Embodiment)
For example, the lodging degree data may be automatically divided for each field by using the field division information such as GIS software.
本発明の第3の実施の形態について説明する。
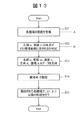
図13における処理を開始し(Start)、ステップS21において、GISソフト等であらかじめ各圃場の頂点の緯度、経度を指定して圃場の範囲を定義しておく(A)。これにより、GPSによる位置別速度データがどの圃場で取得されたものか自動的に判別することができる(ステップS22:B)。
A third embodiment of the present invention will be described.
The process shown in FIG. 13 is started (Start), and in step S21, the latitude and longitude of the vertices of each field are specified in advance by GIS software or the like to define the range of the field (A). As a result, it is possible to automatically determine in which field the GPS-based velocity data for each position was acquired (step S22: B).
ステップS23において、判別後のデータは「北緯、東経、速度、方向、圃場」というように圃場という属性が追加される。 In step S23, the attribute of the field is added to the data after the discrimination, such as "north latitude, east longitude, velocity, direction, field".
ステップS24において、処理対象圃場を決め、ステップS25において、ステップS24で指定された圃場毎にフィルタリング処理、平均化処理、標準化処理、倒伏度への変換がなされる。すなわち、図4のステップS3、図8のステップS13以降の処理を行う。 In step S24, the field to be treated is determined, and in step S25, filtering treatment, averaging treatment, standardization treatment, and conversion to lodging degree are performed for each field designated in step S24. That is, the processes after step S3 in FIG. 4 and step S13 in FIG. 8 are performed.
このような処理により、圃場毎に手動でデータ保存、送信、処理をすることなく、連続的・自動的にデータ取得、保存、送信、処理を行うことが可能となる。 Such processing makes it possible to continuously and automatically acquire, store, transmit, and process data without manually storing, transmitting, and processing data for each field.
上記の実施の形態において、添付図面に図示されている構成等については、これらに限定されるものではなく、本発明の効果を発揮する範囲内で適宜変更することが可能である。その他、本発明の目的の範囲を逸脱しない限りにおいて適宜変更して実施することが可能である。 In the above embodiment, the configuration and the like shown in the accompanying drawings are not limited to these, and can be appropriately changed within the range in which the effects of the present invention are exhibited. In addition, it can be appropriately modified and implemented as long as it does not deviate from the scope of the object of the present invention.
また、本発明の各構成要素は、任意に取捨選択することができ、取捨選択した構成を具備する発明も本発明に含まれるものである。 In addition, each component of the present invention can be arbitrarily selected, and an invention having the selected configuration is also included in the present invention.
本発明は、作物の倒伏度推定装置に利用可能である。 The present invention can be used as a crop lodging degree estimation device.
A…コンバイン(収穫用農機)
1…コンバイン本体
3…GPS受信機(位置測定部)
5…データ処理部
5−1…位置別速度データ取得部
5−2…フィルタリング処理部
5−3…平均値演算部
5−4…標準化処理部
5−5…圃場別倒伏度推定部
5−6…位置別倒伏度推定部
5−7…速度基準値演算部
7…記憶部
7−1…位置別速度データ記憶部
7−2…フィルタリング条件記憶部
7−3…標準化処理条件記憶部
7−4…速度基準値記憶部
7−5…標準化速度―倒伏度変換処理条件記憶部(圃場別、位置別)
7−6…圃場別、位置別の倒伏度記憶部
7−7…他圃場データ記憶部
A ... Combine (agricultural machine for harvesting)
1 ... Combine
5 ... Data processing unit 5-1 ... Velocity data acquisition unit by position 5-2 ... Filtering processing unit 5-3 ... Average value calculation unit 5-4 ... Standardization processing unit 5-5 ... Depression degree estimation unit by field 5-6 ... Position-specific lodging degree estimation unit 5-7 ... Velocity reference
7-6 ... Depression storage unit for each field and position 7-7 ... Other field data storage unit
Claims (15)
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得部と、
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件による処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理部と
を有することを特徴とする作物の倒伏度評価装置。 It is a crop lodging degree evaluation device that uses a harvesting agricultural machine equipped with a position measurement unit.
A position-specific speed data acquisition unit that acquires the speed of the harvesting agricultural machine at the position measured by the position measurement unit, and
Based on the standard value of the speed of the agricultural machine for harvesting obtained in advance, the speed of the agricultural machine for harvesting is standardized by performing the processing under the standardized processing conditions, and the standardized processing unit used as an index of the lodging degree of the crop is used. A crop lodging degree evaluation device characterized by having.
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得部と、A position-specific speed data acquisition unit that acquires the speed of the harvesting agricultural machine at the position measured by the position measurement unit, and
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件記憶部に記憶されている標準化処理条件による処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理部とBased on the reference value of the speed of the harvesting agricultural machine obtained in advance, the speed of the harvesting farming machine is standardized by performing the processing according to the standardized processing conditions stored in the standardized processing condition storage unit, and the crops fall down. With the standardization processing unit as an index of degree
を有することを特徴とする作物の倒伏度評価装置。A crop lodging degree evaluation device characterized by having.
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得部と、A position-specific speed data acquisition unit that acquires the speed of the harvesting agricultural machine at the position measured by the position measurement unit, and
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件記憶部に記憶されている機種又は作業者に依存する標準化処理条件の影響を低減するために前記位置別速度データ取得部により取得した前記収穫用農機の速度から機種又は作業者に依存する標準化処理条件の影響を排除する処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理部とBased on the standard value of the speed of the agricultural machine for harvesting obtained in advance, the speed data for each position is used to reduce the influence of the standardization processing condition depending on the model or the worker stored in the standardization processing condition storage unit. The speed of the harvesting farm machine is standardized by removing the influence of the standardization processing conditions depending on the model or the worker from the speed of the harvesting farm machine acquired by the acquisition unit, and is used as an index of the lodging degree of the crop. With the standardization processing unit
を有することを特徴とする作物の倒伏度評価装置。A crop lodging degree evaluation device characterized by having.
を有することを特徴とする請求項1から3までのいずれか1項に記載の作物の倒伏度評価装置。 The degree of lodging of the crop is estimated based on the relationship between the speed of the farm machine for harvesting standardized by the standardization processing unit, the standardized speed of the farm machine for harvesting and the degree of lodging of the crop, which has been obtained in advance. The crop lodging degree evaluation device according to any one of claims 1 to 3, further comprising an lodging degree estimation unit.
前記収穫用農機の標準化された速度と作物の倒伏度との複数の圃場のそれぞれにおける関係に基づいて倒伏度を推定する請求項4に記載の作物の倒伏度評価装置。 The lodging degree estimation unit
The crop lodging degree evaluation device according to claim 4, wherein the lodging degree is estimated based on the relationship between the standardized speed of the harvesting agricultural machine and the crop lodging degree in each of the plurality of fields.
前記収穫用農機の標準化された速度と作物の倒伏度との位置別の関係に基づいて倒伏度を推定する請求項4に記載の作物の倒伏度評価装置。 The lodging degree estimation unit
The crop lodging degree evaluation device according to claim 4, wherein the lodging degree is estimated based on the positional relationship between the standardized speed of the harvesting agricultural machine and the crop lodging degree.
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得ステップと、
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件による処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理ステップと
を有することを特徴とする作物の倒伏度評価方法。 It is a method of evaluating the degree of lodging of crops using a harvesting agricultural machine equipped with a position measurement unit.
A position-specific speed data acquisition step for acquiring the speed of the harvesting agricultural machine at the position measured by the position measuring unit, and
Based on the standard value of the speed of the farm machine for harvesting obtained in advance, the speed of the farm machine for harvesting is standardized by performing the treatment under the standardization treatment conditions, and the standardization treatment step which is used as an index of the lodging degree of the crop is defined. A method for evaluating the degree of lodging of a crop, which is characterized by having.
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得ステップと、A position-specific speed data acquisition step for acquiring the speed of the harvesting agricultural machine at the position measured by the position measuring unit, and
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件記憶部に記憶されている標準化処理条件による処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理ステップとBased on the reference value of the speed of the harvesting agricultural machine obtained in advance, the speed of the harvesting farming machine is standardized by performing the processing according to the standardized processing conditions stored in the standardized processing condition storage unit, and the crops fall down. With standardization processing steps as an index of degree
を有することを特徴とする作物の倒伏度評価方法。A method for evaluating the degree of lodging of a crop, which is characterized by having.
前記位置測定部により測定した位置における前記収穫用農機の速度を取得する位置別速度データ取得ステップと、A position-specific speed data acquisition step for acquiring the speed of the harvesting agricultural machine at the position measured by the position measuring unit, and
予め求めておいた前記収穫用農機の速度の基準値に基づいて、標準化処理条件記憶部に記憶されている機種又は作業者に依存する標準化処理条件の影響を低減するために前記位置別速度データ取得ステップにより取得した前記収穫用農機の速度から機種又は作業者に依存する標準化処理条件の影響を排除する処理を行うことで前記収穫用農機の速度を標準化し、作物の倒伏度の指標とする標準化処理ステップとBased on the standard value of the speed of the agricultural machine for harvesting obtained in advance, the speed data for each position is used to reduce the influence of the standardization processing condition depending on the model or the worker stored in the standardization processing condition storage unit. The speed of the harvesting farm machine is standardized by removing the influence of the standardization processing conditions depending on the model or the worker from the speed of the harvesting farm machine acquired in the acquisition step, and is used as an index of the lodging degree of the crop. With standardization processing steps
を有することを特徴とする作物の倒伏度評価方法。A method for evaluating the degree of lodging of a crop, which is characterized by having.
を有することを特徴とする請求項9から11までのいずれか1項に記載の作物の倒伏度評価方法。 The crop lodging degree is estimated based on the relationship between the speed of the harvesting agricultural machine standardized by the standardization processing step, the standardized speed of the harvesting farm machine obtained in advance, and the crop lodging degree. The method for evaluating the degree of lodging of a crop according to any one of claims 9 to 11, which comprises a step of estimating the degree of lodging.
判別後のデータに圃場のデータを追加するステップと、
前記圃場のデータが追加されたデータに基づいて、圃場毎の平均あるいは地点別の倒伏度を推定することを特徴とする請求項9から11までのいずれか1項に記載の作物の倒伏度評価方法。 A step that defines the range of the field by specifying the latitude and longitude of the apex of each field, and automatically determines in which field the GPS position-specific velocity data consisting of the position, speed, and direction was acquired. When,
Steps to add field data to the data after discrimination,
The crop lodging degree evaluation according to any one of claims 9 to 11, wherein the average of each field or the lodging degree of each point is estimated based on the data to which the data of the field is added. Method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017040838A JP6895680B2 (en) | 2017-03-03 | 2017-03-03 | Crop lodging evaluation device and crop lodging evaluation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017040838A JP6895680B2 (en) | 2017-03-03 | 2017-03-03 | Crop lodging evaluation device and crop lodging evaluation method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018143160A JP2018143160A (en) | 2018-09-20 |
| JP2018143160A5 JP2018143160A5 (en) | 2019-11-21 |
| JP6895680B2 true JP6895680B2 (en) | 2021-06-30 |
Family
ID=63588531
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017040838A Active JP6895680B2 (en) | 2017-03-03 | 2017-03-03 | Crop lodging evaluation device and crop lodging evaluation method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6895680B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7225002B2 (en) * | 2019-03-29 | 2023-02-20 | 株式会社クボタ | Spraying support device and spraying support system |
| JP7381402B2 (en) * | 2019-06-28 | 2023-11-15 | 株式会社クボタ | automatic driving system |
| KR20220027811A (en) * | 2019-06-28 | 2022-03-08 | 가부시끼 가이샤 구보다 | Automatic driving system, agricultural equipment, program, recording medium and method recording the program |
| JP7429964B2 (en) | 2020-04-27 | 2024-02-09 | 国立研究開発法人農業・食品産業技術総合研究機構 | Base fertilizer amount calculation device, basal fertilizer amount calculation method, and basal fertilizer amount calculation program |
| JP7340258B2 (en) * | 2020-04-27 | 2023-09-07 | 国立研究開発法人農業・食品産業技術総合研究機構 | Additional fertilizer amount calculation device, additional fertilizer amount calculation method, and additional fertilizer amount calculation program |
| CN112525687B (en) * | 2020-11-26 | 2023-11-21 | 甘肃农业大学 | Method for identifying lodging resistance of cabbage-type winter rape by using improved lodging coefficient |
| CN116448754B (en) * | 2023-06-13 | 2023-09-19 | 清华大学 | Crop lodging resistance measurement method and device, electronic equipment and storage medium |
| CN117370860A (en) * | 2023-10-18 | 2024-01-09 | 河南省农业科学院农业经济与信息研究所 | Crop yield prediction method based on machine vision |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11137062A (en) * | 1997-11-10 | 1999-05-25 | Yanmar Agricult Equip Co Ltd | Control device of conventional combine harvester |
| JPH11155340A (en) * | 1997-11-25 | 1999-06-15 | Yanmar Agricult Equip Co Ltd | General-purpose combine |
| JP2008067644A (en) * | 2006-09-14 | 2008-03-27 | Mitsubishi Agricult Mach Co Ltd | Combine harvester |
| US20110083518A1 (en) * | 2009-10-12 | 2011-04-14 | Pioneer Hi-Bred International, Inc. | Correlating Push Force and Stalk Vibration to a Plant's Susceptibility to Root Lodging, Stalk/Stem Lodging and Brittle Snap (Broken Stems or Stalks) |
| JP2011155907A (en) * | 2010-02-01 | 2011-08-18 | Mitsubishi Agricultural Machinery Co Ltd | Combine harvester |
| JP6147579B2 (en) * | 2013-06-18 | 2017-06-14 | 株式会社日立製作所 | Yield prediction system and yield prediction device |
| JP6153462B2 (en) * | 2013-12-17 | 2017-06-28 | 株式会社クボタ | Work management system |
-
2017
- 2017-03-03 JP JP2017040838A patent/JP6895680B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018143160A (en) | 2018-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6895680B2 (en) | Crop lodging evaluation device and crop lodging evaluation method | |
| US20200334766A1 (en) | Agricultural field management system | |
| US9972058B2 (en) | Method for correcting the time delay in measuring agricultural yield | |
| Kalisperakis et al. | Leaf area index estimation in vineyards from UAV hyperspectral data, 2D image mosaics and 3D canopy surface models | |
| Matese et al. | Assessment of a canopy height model (CHM) in a vineyard using UAV-based multispectral imaging | |
| US10151839B2 (en) | Systems and methods for determining crop yields with high resolution geo-referenced sensors | |
| US9104697B2 (en) | Aquatic geographic information system | |
| Khanna et al. | Beyond point clouds-3d mapping and field parameter measurements using uavs | |
| JP6836385B2 (en) | Positioning device, location method and program | |
| EP3626043B1 (en) | Agricultural work apparatus, agricultural work management system, and program | |
| WO2017011595A1 (en) | Modular systems and methods for determining crop yields with high resolution geo-referenced sensors | |
| US11935289B2 (en) | Agricultural analysis robotic systems and methods thereof | |
| JP2022128127A (en) | Information processing device, information processing method, and program | |
| Feng et al. | Cotton yield estimation based on plant height from UAV-based imagery data | |
| CN110383322B (en) | Yield information display system | |
| KR102371433B1 (en) | System and method for generating farming map of agricultural robot based on artificial intelligence | |
| JP2018165989A (en) | Firm field management system | |
| JP2022181163A (en) | Information processing apparatus, information processing method, and program | |
| Wang et al. | Estimation of Crop Height and Digital Biomass from UAV-Based Multispectral Imagery | |
| JP2020162490A (en) | Spraying support device and spraying support system | |
| WO2024190804A1 (en) | Information processing device, information processing method, and program | |
| JP7474031B2 (en) | Field information management device, field information management system, control method for field information management device, and field information management program | |
| Găgeanu et al. | Method for determining the vegetation state of crops through aerial mapping using an agricultural drone. | |
| Scott | A Comparative Analysis of Georeferencing Techniques for Crop Canopy Height Estimation Using UAS Photogrammetry | |
| Enos et al. | UAV multispectral imagery in determination of paddy conditions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191008 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191008 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210525 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6895680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |