JP6891165B2 - 電気外科発電機および方法 - Google Patents
電気外科発電機および方法 Download PDFInfo
- Publication number
- JP6891165B2 JP6891165B2 JP2018506879A JP2018506879A JP6891165B2 JP 6891165 B2 JP6891165 B2 JP 6891165B2 JP 2018506879 A JP2018506879 A JP 2018506879A JP 2018506879 A JP2018506879 A JP 2018506879A JP 6891165 B2 JP6891165 B2 JP 6891165B2
- Authority
- JP
- Japan
- Prior art keywords
- output
- power
- wand
- electrode
- cutting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 51
- 238000005520 cutting process Methods 0.000 claims description 115
- 238000005259 measurement Methods 0.000 claims description 34
- 230000015654 memory Effects 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 16
- 238000012544 monitoring process Methods 0.000 claims description 12
- 230000004308 accommodation Effects 0.000 claims description 2
- 238000002679 ablation Methods 0.000 claims 1
- 210000001519 tissue Anatomy 0.000 description 93
- 239000000523 sample Substances 0.000 description 32
- 230000006870 function Effects 0.000 description 31
- 239000002243 precursor Substances 0.000 description 18
- 238000003860 storage Methods 0.000 description 12
- 239000012530 fluid Substances 0.000 description 10
- 230000000007 visual effect Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 7
- 230000004044 response Effects 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 7
- 238000012546 transfer Methods 0.000 description 7
- 210000005069 ears Anatomy 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 6
- 239000010935 stainless steel Substances 0.000 description 6
- 229910001220 stainless steel Inorganic materials 0.000 description 6
- 230000007704 transition Effects 0.000 description 6
- 230000006378 damage Effects 0.000 description 5
- 238000012805 post-processing Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 238000001914 filtration Methods 0.000 description 4
- 230000000977 initiatory effect Effects 0.000 description 4
- 229920000642 polymer Polymers 0.000 description 4
- 238000010926 purge Methods 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 210000000577 adipose tissue Anatomy 0.000 description 3
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 230000006266 hibernation Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000036961 partial effect Effects 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 238000007920 subcutaneous administration Methods 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 238000001574 biopsy Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 150000002500 ions Chemical class 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 206010042674 Swelling Diseases 0.000 description 1
- 229910001080 W alloy Inorganic materials 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000035559 beat frequency Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000003776 cleavage reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 210000002808 connective tissue Anatomy 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 210000003722 extracellular fluid Anatomy 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 210000003701 histiocyte Anatomy 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000003834 intracellular effect Effects 0.000 description 1
- 210000002977 intracellular fluid Anatomy 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 238000009533 lab test Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000003589 local anesthetic agent Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 238000010827 pathological analysis Methods 0.000 description 1
- 230000001575 pathological effect Effects 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000000541 pulsatile effect Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000007017 scission Effects 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 230000003685 thermal hair damage Effects 0.000 description 1
Images







































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/0266—Pointed or sharp biopsy instruments means for severing sample
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/221—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/042—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating using additional gas becoming plasma
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/148—Probes or electrodes therefor having a short, rigid shaft for accessing the inner body transcutaneously, e.g. for neurosurgery or arthroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/149—Probes or electrodes therefor bow shaped or with rotatable body at cantilever end, e.g. for resectoscopes, or coagulating rollers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00853—Material properties low friction, hydrophobic and corrosion-resistant fluorocarbon resin coating (ptf, ptfe, polytetrafluoroethylene)
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/221—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions
- A61B2017/2215—Gripping devices in the form of loops or baskets for gripping calculi or similar types of obstructions having an open distal end
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/00267—Expandable means emitting energy, e.g. by elements carried thereon having a basket shaped structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00333—Breast
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00601—Cutting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00625—Vaporization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00767—Voltage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00779—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00827—Current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00892—Voltage
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
- A61B2018/00916—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device
- A61B2018/00922—Handpieces of the surgical instrument or device with means for switching or controlling the main function of the instrument or device by switching or controlling the treatment energy directly within the hand-piece
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00988—Means for storing information, e.g. calibration constants, or for preventing excessive use, e.g. usage, service life counter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1213—Generators therefor creating an arc
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1266—Generators therefor with DC current output
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1407—Loop
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/142—Electrodes having a specific shape at least partly surrounding the target, e.g. concave, curved or in the form of a cave
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/144—Wire
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1465—Deformable electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1475—Electrodes retractable in or deployable from a housing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/007—Aspiration
Description
本出願は、2015年8月13日出願の「ELECTROSURGICAL GENERATOR AND METHODS」という名称の米国仮出願第62/204,807号および2015年8月13日出願の「ELECTROSURGICAL METHOD AND APPARATUS WITH VARYING STIFFNESS CAPTURE COMPONENTS」という名称の米国仮出願第62/204,836号の利益を主張し、その両出願はそれらの全体が引用により本明細書に援用される。
該当なし。
本開示は、概して電気外科発電機に関し、より詳細には、電気外科器具の切断電極に送出される電力を調整するために使用されるフィードバック制御に関する。
ある実施形態において、電流監視回路は、RF発電機の出力での瞬時電流の二乗平均平方根を測定するように構成される。
式中、POUT(t)は平均電力の測定値(たとえば、RF発電機の出力での、または切断電極での)であり、
ある実施形態において、コントローラは、
式中、VRMSは電位の二乗平均平方根測定値(たとえば、RF発電機の出力での、または切断電極での)であり、Zは負荷インピーダンス(たとえば、切断電極および組織の)であり、そしてθzは求めた差動位相角である。
ある実施形態において、電極アームによって形成されるレセプタクルは、ほぼ12mmより大きい最大捕捉直径を有する。
ある実施形態において、所与の切除ワンド種類の制御設定は、それぞれの切除ワンド種類の切断電極に出力されることになる個別の電力曲線を含む。
ある実施形態において、発生されるRFによる電力出力は、

式中、Vrmsは出力されたAC電圧の実効値(たとえば、DC相当値)であり、Zは標的組織のインピーダンスであり、そしてθzは標的組織のインピーダンスの位相角である。
ある実施形態において、電圧出力および電流出力は、同時に測定される。
式中、POUT(t)は平均電力の測定値(たとえば、RF発電機の出力での、または切断電極での)であり、
ある実施形態において、方法は、RF発電機の電力出力を電力検知回路を介して測定するステップと、電圧出力、電流出力および電力出力から導出される差動位相角値に基づいてRFエネルギーの電力出力をプロセッサによって調節するステップとを含む。
ある実施形態において、方法は、RF発電機が切除ワンドに作動的に接続されるときに切除ワンドのワンドサイズを自動的に識別する(たとえば、抵抗値、容量値またはメッセージに基づいて)ステップと、関連付けられたワンドサイズの識別に基づいてRFエネルギーの出力電力を調節するステップとを含む。
別の態様において、開示される技術は、電気外科器具(たとえば、切除ワンド)の切断電極を収容位置から展開位置に伸長して、標的組織(たとえば、皮下標的組織)を捕捉して引き出すように構成される電気外科器具に作動的に連結するように構成されるRF発電機であって、電気外科器具の信号線へのインタフェースであり、信号線が、電気外科器具に収容される識別素子(たとえば、抵抗器、コンデンサ、集積回路(IC)データモジュール)に連結されている、インタフェースと、中に複数の制御設定を記憶しており、各制御設定が、電気外科器具種類であり、切除ワンドのサイズ特性(たとえば、12mm切除ワンド、15mm切除ワンド、20mm切除ワンドおよび30mm切除ワンド)と関連付けられる各電気外科器具種類の制御と関連付けられる、メモリ(たとえば、ルックアップテーブル)と、信号線を介して受信される信号(たとえば、電圧測定値、電流測定値、抵抗測定値、周波数測定値またはデータメッセージ)に基づいて、取り付けられた電気外科器具のために複数の制御設定から制御設定を選択するように構成されるコントローラとを含むRF発電機を含む電気外科システムを含む。
ある実施形態において、複数の制御設定は、ルックアップテーブルに記憶される。
ある実施形態において、電気外科器具は、RF発電機のインタフェースに脱着可能に取り付けられるように構成される。
ある実施形態において、電気外科器具は、多重使用のために構成される。
ある実施形態において、識別子は、抵抗器を含み、そしてインタフェースは、信号線に電位を印加し、そして識別素子の抵抗を測定するように構成される。
別の態様において、開示される技術は、1つまたは複数の伸長可能な電極アームに連結される切断電極を収容位置から展開位置に伸長する(たとえば、摺動可能に伸長する)ように構成される電極アームを有し、電極アームの伸長の間、切断電極が、RFエネルギーで通電されて、標的組織の近位の組織を切開して、電極アームが標的組織を包囲するレセプタクルを形成するように構成される、切除ワンドと、切断電極に作動的に連結されるRF発電機であって、電極アームの伸長の間、切断電極に電力を出力するように構成される電力回路(たとえば、スイッチング電力回路)と、切断電極が、切断の間、一定の電力密度を維持するように、切断されている組織の変動するインピーダンスを補償するように構成されるインピーダンス弁別回路とを含むRF発電機とを含む電気外科システム(たとえば、組織インピーダンス補償を用いる)を含む。
ある実施形態において、インピーダンス弁別回路は、インピーダンス整合ネットワーク(たとえば、ローパスフィルタ)を備える。
ある実施形態において、ローパスフィルタは、バタワースフィルタを含む。
ある実施形態において、ローパスフィルタは、三次ローパスフィルタを含む。
ある実施形態において、電力回路は、RFチョッパ回路およびタンク回路から成る群から選択されるメンバを備える。
ある実施形態において、インピーダンス弁別回路は、アクティブフィルタ回路を備える。
ある実施形態において、フィルタリングは、三次ローパスフィルタに起因する。
式中、bはストラットの幅であり、hはストラットの厚さであり、そしてlはストラットの長さである。摘出量サイズが増すにつれて、焼灼の間により多くの組織を切開するのに、より高い出力電力が必要である。このために、より高い電力出力は、組織の電気的特性の変動性に鑑みて、器具の不完全な展開という結果になる場合がある失速または過電流/過電力事象の可能性を増す。開示される技術は、とりわけ、切断フィラメントの露出される長さの全体にわたって送出されるより均一な実電力の維持を可能にする、切断アークに送出される平均実電力の測定値を提供する。加えて、開示される技術は、出力電力を調整して標的組織の平均組織インピーダンスに整合させることにさらに備える。これらの特徴は、とりわけ、制御を不安定にする、意図しない方途で組織を損傷する、または器具を損傷する場合がある局所化された電力変動の発生の可能性を低下させる。
図4は、実施形態に従うRF発電機アーキテクチャの例示である。同期DC−DC電力変換器400、RFチョッパドライバ402、後置フィルタインピーダンス弁別器404、ならびにRF電圧、電流および平均電力監視回路406の記載が以下に提供される。
同期DC−DC変換器4400の一次機能は、「DC−DC−CMD」と呼ばれる「デジタルコントローラ」生成信号の指揮下で直流電圧を発生することである。この信号は、RFチョッパ4402変圧器の一次側に印加される「DC−DC−IN」と呼ばれる出力直流電圧を生成する。結果的に、同期DC−DC出力電圧は、負荷で最終出力RF電圧振幅を変調する。
図5は、RFチョッパドライバ例5000の例示である。ある実施形態において、RFチョッパドライバは、図5に図示されるようにプッシュプルトポロジである。概して、2つの相補的なデジタル電圧レベル信号が、MOSFET Q1およびQ2を交互にオン/オフに切替える。この切替え動作は、「可変DC−DC変換器出力電圧」から変圧器T1の二次巻線に+VDC電位(図5におけるVDCの極性に留意されたい)を交互に印加する。巻線のための一次対二次巻数比は1:6であり、それゆえに、交流+VDCは、二次または「後置フィルタへ」側でVDC振幅AC方形波を6倍に増幅する(たとえば、±6xで乗算する)。RFチョッパ論理駆動は、交流パルス駆動信号フェーズ−1およびフェーズ−2間の必要とされる不感時間(たとえば、200ナノ秒)を提供して、両MOSFETが同時にオンせず、T1のトロイドコアを飽和させないことを保証する。
図1に戻って参照すると、後処理フィルタインピーダンス弁別回路が336として図示される(図4に4404としても図示される)。インピーダンス負荷弁別回路336は、異なるインピーダンスの組織を切開するときに切断フィラメントに送出される電力を、電力が同じままであるように正規化する。この正規化は、出力電力を調整して標的組織の平均組織インピーダンスに整合させる。
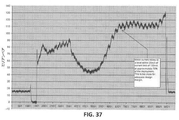
H:=0.4・1024R39(0.300274・1016s R39+0.4・1024R39+0.1000200000 1026+0.5480001605 1011s2 R39+321.s3 R39+0.1070000000 1013s2+0.4000005350 1020s) (式2)
式2から、三次ローパス関数が認められる。図7に図示されるように、3Dプロットが、患者抵抗および周波数への後置フィルタの電圧伝達の依存を図示する。
上記したように、出力電力を調節して切断アークのための均一な実電力密度を可能にするために、いくつかの実施形態において、実際の電力の位相角測定が本コントローラによって利用される。位相角測定は、式3において「角度Z」として示される差動位相角の計算を可能にする。
図36は、例示的な実施形態に係る電気外科器具を作動させる方法400のダイアグラムである。方法400は、1つまたは複数の電気外科フィラメント(たとえば、タングステン合金フィラメント)および、それらの前縁で電気外科フィラメントに連結されて切断平面を定める複数の捕捉部品(たとえば、細長いステンレス鋼リーフ)を有する電気外科器具を提供することを含む。特に、方法は、それらの伸長の長さに沿って変動する剛性を持つ捕捉部品を有する電気外科器具を提供することを含む(ステップ402)。
図15は、捕捉器具を持つ電気外科システム例10を例示する。いくつかの実施形態において、システム10は、再使用可能な部品14(時に「ハンドル」と称される)および、再使用可能な部品14のポリマーハウジング18内に取り外し可能に装着される使い捨ての送出部品16(時に「プローブ」と称される)を含む捕捉器具12を含む。いくつかの実施形態において、ハンドル14および送出部品16は、単一の使い捨てユニットとして統合される。
図16を参照すると、ハンドヘルド器具12の送出部品16は、再使用可能な部品14のハウジング18内へのその挿入の前の向きで現される。図において、カニューレアセンブリ22は、円筒形状の支持ハウジング130から前方へ伸長しているのを見られる。いくつかの実施形態において、支持ハウジング130の前方領域は、回転可能なコネクタ26を支持する。この点に関して、コネクタ26には、離間した刻み目が形成されてその手による回転を容易にする把握面134とともに回転するように付設される雄ねじ132が構成されることが認められてもよい。支持ハウジング130の後方端では、いくつかの実施形態において、使い捨ての部品16の組込みの間、細長い受入れキャビティ140に沿って内部的に延在する上方へ配置された細長いスロット138内に摺動可能に受け入れられる直立した割出しピン136が設けられる。ハウジング18の受入れキャビティ140の前方端には、いくつかの実施形態において、調心ブッシング128が形成される。いくつかの実施形態において、調心ブッシング128には、雌ねじ142が構成される。いくつかの実施形態において、使い捨ての部品16に再使用可能な部品14が装着されるとき、キャビティ140内の調心ブッシング128の雌ねじ142は、コネクタ26の雄ねじ132に螺合する。
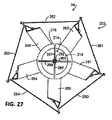
図29を参照すると、断面図が提示され、いくつかの実施形態において、使い捨ての部品16の支持ハウジング130との再使用可能な部品14のモータ駆動機構の動作関連を例示する。図において、モータアセンブリ180は、モータ装着チャンバ182内に設けられるのを見られる。いくつかの実施形態において、そのチャンバ182において、モータアセンブリ180は、いくらかの自動調心運動が許可されるが、しかしトルクストップ部品184によって回転運動が制限される。いくつかの実施形態において、アセンブリ180は、遊星歯車アセンブリ188と駆動関係に連結されるモータ部品186を組み入れる。いくつかの実施形態において、遊星歯車アセンブリ188の駆動出力は、反対側に配置され、かつ離間した隔壁196および198によって画定されるシールチャンバ194内に設けられる流体シール192を通って延在するステンレス鋼可撓ベローズ形状の連結器190と駆動関係に接続される。いくつかの実施形態において、シール192は、連結器190を制約せず、細長いねじ並進部品200の後方端へのその連結に関して、モータアセンブリ180の上記した自動調心を許可する。いくつかの実施形態において、並進部品200の前方端は、延在してスラスト軸受202と係合する。いくつかの実施形態において、軸受202は、モータアセンブリ180から課される駆動力のすべてに対して支持を提供し、そしてスラスト軸受チャンバ204内に装着および固定される。いくつかの実施形態において、並進部品200は、ボールねじまたはナット部品208、およびタブまたは耳160および162(図16)との駆動するが、自由に当接する係合のために揃えられた位置まで延在するように構成される全体的にY形状のヨーク210を備える、全体的に206で表される伝達アセンブリと螺合される。いくつかの実施形態において、捕捉手順の間、並進部品200は、適切な方向に駆動可能に回転されて、伝達アセンブリ206を前方へ移動させる。いくつかの実施形態において、その運動は、次いで、捕捉部品すぼめ作業が完了されて、モータ部品186が失速状態に入るまで、駆動部品を前方へ付勢する。その際に、制御システム70は、いくつかの実施形態において、電気外科切断電流を停止し、そしてモータ186の方向駆動感知を逆転させて、伝達アセンブリ206に、当該図に全体的に例示される「定」位置に戻らせる。図は、いくつかの実施形態において、支持ハウジング130上に設けられる2つの電気接点146および148が、ポリマー接点クランプ212によって支持される対応する接点(図示せず)と接触しているであろうことを付加的に現す。
いくつかの実施形態において、コンソール72は、プロセッサ、メモリ、ストレージデバイス、メモリおよび複数の高速拡張ポートに接続する高速インタフェース、ならびに低速拡張ポートおよびストレージデバイスに接続する低速インタフェースを有するコンピューティング装置を含んでもよい。プロセッサ、メモリ、ストレージデバイス、高速インタフェース、高速拡張ポートおよび低速インタフェースの各々は、様々なバスを使用して相互接続され、そして共通のマザーボードに、または適宜他の様式で搭載されてもよい。プロセッサは、高速インタフェースに結合されるディスプレイなどの外部入出力デバイスにGUIのためのグラフィック情報を表示するためにメモリまたはストレージデバイスに記憶される命令を含め、コンピューティング装置内で実行するための命令を処理することができる。他の実装において、複数のプロセッサおよび/または複数のバスが、適宜、複数のメモリおよび複数の種類のメモリとともに使用されてもよい。また、複数のコンピューティング装置が、各装置が必要な動作の一部を提供しつつ(たとえば、サーババンク、一群のブレードサーバまたはマルチプロセッサシステムとして)接続されてもよい。
説明の全体を通して、システムおよび組成物が具体的な部品を有する、含む、または備えるとして記載される、または工程および方法が具体的なステップを有する、含む、または備えるとして記載されるが、追加的に、本質的に列挙された部品から成る、またはそれらから成る本実施形態のシステムおよび組成物があること、および本質的に列挙された処理ステップから成る、またはそれらから成る本実施形態の工程および方法があることが企図される。
Claims (9)
- 1つまたは複数の伸長可能な電極アームに連結される切断電極を収容位置から展開位置に伸長するように構成される前記電極アームを有し、前記電極アームの伸長の間、前記切断電極が、RFエネルギーで通電されて、標的組織の近位の組織を切開して、前記電極アームが前記標的組織を包囲するレセプタクルを形成するように構成される、切除ワンドと、
前記切除ワンドに作動的に連結される出力を有するRF発電機であって、
電力回路と、
前記切断電極を通る電流フローの測定値と関連付けられる電流検知出力を有する電流監視回路と、
前記切断電極に印加される電位の測定値と関連付けられる電圧検知出力を有する電圧監視回路)と、
前記電流検知出力および前記電圧検知出力に少なくとも部分的に基づいて差動位相角を求めることによって前記RFエネルギーの出力電力を求め、各々1つまたは複数の異なるワンド種類と関連付けられる複数の制御設定から前記切除ワンドのための制御設定を選択し、そして前記選択した制御設定との前記求めた出力電力の比較に基づいて、前記切断電極に出力される前記RFエネルギーを調整するように構成されるコントローラとを備えるRF発電機と、を備え
前記ワンド種類の前記制御設定が、前記それぞれの切除ワンド種類の前記切断電極に出力されることになる個別の電力曲線を含み、
各個別の電力曲線が、
アーク開始のための出力電圧と、
アーク開始のための出力時間と、
時定数値の形態のソフトスタート出力電力と、
時間経過に伴う複数の電力値を含む電力プロファイル定義と、
から成る群から選択されるメンバを含む、
電気外科システム。 - 前記コントローラが、前記切断電極が前記組織を切開するときに均一な電力密度を有するように、前記切断電極に出力される前記RFエネルギーを調節するように構成される、請求項1に記載のシステム。
- 前記RF発電機が、
前記切断電極に印加される前記RFエネルギーの平均電力の測定値と関連付けられる電力検知出力を有する電力監視回路を備える、請求項1に記載のシステム。 - 前記電極アームによって形成される前記レセプタクルが、ほぼ10mmから30mmの最大捕捉直径を有する、請求項1に記載のシステム。
- 前記RF発電機が、
前記切除ワンドの信号線へのインタフェースであり、前記信号線が、前記切除ワンドに収容される識別素子に連結されている、インタフェースと、
中に切除ワンド種類のリストを記憶しており、各切除ワンド種類が、関連付けられた制御設定を有する、メモリと、
を備える、請求項1に記載のシステム。 - 1つまたは複数の伸長可能な電極アームに連結される切断電極を収容位置から展開位置に伸長するように構成される前記電極アームを有し、前記電極アームの伸長の間、前記切断電極が、RFエネルギーで通電されて、標的組織の近位の組織を切開して、前記電極アームが前記標的組織を包囲するレセプタクルを形成するように構成される、切除ワンドと、
前記切除ワンドに作動的に連結される出力を有するRF発電機と、
前記切除ワンドの切断電極に、RF発電機を介して発生されるRFエネルギーで通電する手段と、
前記切除ワンドの電極アームを収容位置から展開位置に伸長し、前記電極アームが前記切断電極に連結されており、前記伸長により、前記切断電極に、標的組織の近位の組織を切開して、捕捉される標的組織の周囲にレセプタクルを形成させる、手段と、
前記RF発電機の電圧出力を、電圧検知回路を介して測定する手段と、
前記RF発電機の電流出力を、電流センサ回路を介して測定する手段と、
前記切除ワンドと関連付けられ、かつ各々1つまたは複数の異なるワンド種類と関連付けられる複数の制御設定から選択される制御設定との前記電圧出力および前記電流出力から導出される差動位相角測定値の比較に基づいて、前記RF発電機によって発生される前記RFエネルギーをプロセッサによって調節する手段と、
を含み、
前記ワンド種類の前記制御設定が、前記それぞれの切除ワンド種類の前記切断電極に出力されることになる個別の電力曲線を含み、
各個別の電力曲線が、
アーク開始のための出力電圧と、
アーク開始のための出力時間と、
時定数値の形態のソフトスタート出力電力と、
時間経過に伴う複数の電力値を含む電力プロファイル定義と、
から成る群から選択されるメンバを含む、
システム。 - 前記測定した電流出力が、前記RF発電機の瞬時電流出力であり、かつ前記測定した電圧出力が、前記RF発電機の瞬時電圧出力である、請求項6に記載のシステム。
- 前記RF発電機の電力出力を、電力検知回路を介して測定する手段と、
前記電圧出力、前記電流出力および前記電力出力から導出される差動位相角値に基づいて前記RFエネルギーの前記電力出力を前記プロセッサによって調節する手段と、
を含む、請求項6に記載のシステム。 - 前記RF発電機が切除ワンドに作動的に接続されるときに前記切除ワンドのワンドサイズを自動的に識別する手段と、
前記関連付けられたワンドサイズの前記識別に基づいて前記RFエネルギーの出力電力を調節する手段と、
を含む、請求項6に記載のシステム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562204807P | 2015-08-13 | 2015-08-13 | |
| US201562204836P | 2015-08-13 | 2015-08-13 | |
| US62/204,836 | 2015-08-13 | ||
| US62/204,807 | 2015-08-13 | ||
| PCT/US2016/046788 WO2017027809A1 (en) | 2015-08-13 | 2016-08-12 | Electrosurgical generator and methods |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018525101A JP2018525101A (ja) | 2018-09-06 |
| JP6891165B2 true JP6891165B2 (ja) | 2021-06-18 |
Family
ID=57983731
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018506872A Active JP6777727B2 (ja) | 2015-08-13 | 2016-08-12 | 剛性変動捕捉部品を用いる電気外科方法および装置 |
| JP2018506879A Active JP6891165B2 (ja) | 2015-08-13 | 2016-08-12 | 電気外科発電機および方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018506872A Active JP6777727B2 (ja) | 2015-08-13 | 2016-08-12 | 剛性変動捕捉部品を用いる電気外科方法および装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US10363079B2 (ja) |
| EP (2) | EP3334361B1 (ja) |
| JP (2) | JP6777727B2 (ja) |
| KR (2) | KR20180039720A (ja) |
| CN (2) | CN108366819B (ja) |
| AU (2) | AU2016305076B2 (ja) |
| CA (2) | CA2995615A1 (ja) |
| WO (2) | WO2017027800A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10028753B2 (en) | 2008-09-26 | 2018-07-24 | Relievant Medsystems, Inc. | Spine treatment kits |
| US10390877B2 (en) | 2011-12-30 | 2019-08-27 | Relievant Medsystems, Inc. | Systems and methods for treating back pain |
| US10588691B2 (en) | 2012-09-12 | 2020-03-17 | Relievant Medsystems, Inc. | Radiofrequency ablation of tissue within a vertebral body |
| EP2914186B1 (en) | 2012-11-05 | 2019-03-13 | Relievant Medsystems, Inc. | Systems for creating curved paths through bone and modulating nerves within the bone |
| US9724151B2 (en) | 2013-08-08 | 2017-08-08 | Relievant Medsystems, Inc. | Modulating nerves within bone using bone fasteners |
| US11737808B2 (en) * | 2017-01-23 | 2023-08-29 | Eggers & Associates, LLC | Minimally invasive diagnostic and therapeutic excision of tissue |
| AR109877A1 (es) * | 2017-10-24 | 2019-01-30 | Jorge Ernesto Odon | Kit para extracción de tejidos |
| JP7300570B2 (ja) * | 2018-02-13 | 2023-06-30 | 国立大学法人 長崎大学 | 切除器具 |
| US11116563B2 (en) | 2018-02-15 | 2021-09-14 | Biosense Webster (Israel) Ltd. | Multi-channel RF ablation |
| JP7346583B2 (ja) * | 2019-02-26 | 2023-09-19 | コンメッド コーポレーション | 電気外科手術機器用モジュール式ドッキングシステム |
| CN111803204B (zh) * | 2019-07-08 | 2022-07-01 | 昆山雷盛医疗科技有限公司 | 射频热消融系统及其控制方法 |
| CN111374761B (zh) * | 2019-08-06 | 2021-11-02 | 深圳钮迈科技有限公司 | 肿瘤治疗仪的模拟消融系统及方法 |
| CA3150339A1 (en) | 2019-09-12 | 2021-03-18 | Brian W. Donovan | TISSUE MODULATION SYSTEMS AND METHODS |
| BR112022016333A2 (pt) * | 2020-02-18 | 2022-10-04 | Apyx Medical Corp | Dispositivos, sistemas e métodos para detectar, e discernir entre, tecido adiposo e muscular durante procedimentos médicos |
| CN112274242B (zh) * | 2020-10-22 | 2023-06-30 | 四川大学华西第四医院 | 一种便于功率调节的射频电波刀 |
| CN112596869B (zh) * | 2020-12-08 | 2023-05-26 | 成都海光微电子技术有限公司 | 延时模型的构建方法及装置、电子设备及存储介质 |
| US20220265252A1 (en) * | 2021-02-19 | 2022-08-25 | Covidien Lp | Device for tissue harvesting for biopsy examination |
Family Cites Families (66)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2032860A (en) | 1933-03-24 | 1936-03-03 | Wappler Frederick Charles | Method for electrosurgical treatment of tissue |
| US3896608A (en) * | 1973-06-25 | 1975-07-29 | Sperry Rand Corp | Static magnetic field metal detector |
| US3955578A (en) | 1974-12-23 | 1976-05-11 | Cook Inc. | Rotatable surgical snare |
| GB2011258A (en) | 1977-11-18 | 1979-07-11 | Wolf Gmbh Richard | Device for removing excrescences and polyps |
| JPS5552748A (en) | 1978-10-12 | 1980-04-17 | Olympus Optical Co | Highhfrequency incising tool |
| GB2053691B (en) | 1979-07-24 | 1983-04-27 | Wolf Gmbh Richard | Endoscopes |
| ATE194469T1 (de) * | 1993-03-16 | 2000-07-15 | Ep Technologies | Träger-anordnung für mehrfach-elektroden |
| US5476495A (en) * | 1993-03-16 | 1995-12-19 | Ep Technologies, Inc. | Cardiac mapping and ablation systems |
| US6293942B1 (en) * | 1995-06-23 | 2001-09-25 | Gyrus Medical Limited | Electrosurgical generator method |
| DE19528440C2 (de) | 1995-08-02 | 1998-09-10 | Harald Dr Med Kuebler | Chirurgisches Schneidinstrument |
| DE19626408A1 (de) | 1996-07-01 | 1998-01-08 | Berchtold Gmbh & Co Geb | Trokar für laparoskopische Operationen |
| US5891142A (en) * | 1996-12-06 | 1999-04-06 | Eggers & Associates, Inc. | Electrosurgical forceps |
| US6626903B2 (en) * | 1997-07-24 | 2003-09-30 | Rex Medical, L.P. | Surgical biopsy device |
| US6270464B1 (en) | 1998-06-22 | 2001-08-07 | Artemis Medical, Inc. | Biopsy localization method and device |
| US6331166B1 (en) | 1998-03-03 | 2001-12-18 | Senorx, Inc. | Breast biopsy system and method |
| US6659105B2 (en) | 1998-02-26 | 2003-12-09 | Senorx, Inc. | Tissue specimen isolating and damaging device and method |
| US6261241B1 (en) | 1998-03-03 | 2001-07-17 | Senorx, Inc. | Electrosurgical biopsy device and method |
| US6540693B2 (en) | 1998-03-03 | 2003-04-01 | Senorx, Inc. | Methods and apparatus for securing medical instruments to desired locations in a patients body |
| US6296639B1 (en) | 1999-02-12 | 2001-10-02 | Novacept | Apparatuses and methods for interstitial tissue removal |
| US7137980B2 (en) * | 1998-10-23 | 2006-11-21 | Sherwood Services Ag | Method and system for controlling output of RF medical generator |
| US7189206B2 (en) | 2003-02-24 | 2007-03-13 | Senorx, Inc. | Biopsy device with inner cutter |
| US6287304B1 (en) * | 1999-10-15 | 2001-09-11 | Neothermia Corporation | Interstitial cauterization of tissue volumes with electrosurgically deployed electrodes |
| US6471659B2 (en) * | 1999-12-27 | 2002-10-29 | Neothermia Corporation | Minimally invasive intact recovery of tissue |
| US6277083B1 (en) * | 1999-12-27 | 2001-08-21 | Neothermia Corporation | Minimally invasive intact recovery of tissue |
| EP1307154B1 (de) * | 2000-08-08 | 2005-02-23 | Erbe Elektromedizin GmbH | Hochfrequenzgenerator für die hochfrequenzchirurgie mit einstellbarer leistungsbegrenzung |
| US6678621B2 (en) * | 2000-10-20 | 2004-01-13 | Ethicon Endo-Surgery, Inc. | Output displacement control using phase margin in an ultrasonic surgical hand piece |
| US20020072739A1 (en) | 2000-12-07 | 2002-06-13 | Roberta Lee | Methods and devices for radiofrequency electrosurgery |
| US6620157B1 (en) * | 2000-12-28 | 2003-09-16 | Senorx, Inc. | High frequency power source |
| US6913579B2 (en) | 2001-05-01 | 2005-07-05 | Surgrx, Inc. | Electrosurgical working end and method for obtaining tissue samples for biopsy |
| US6923804B2 (en) * | 2001-07-12 | 2005-08-02 | Neothermia Corporation | Electrosurgical generator |
| US6740079B1 (en) | 2001-07-12 | 2004-05-25 | Neothermia Corporation | Electrosurgical generator |
| US7041108B2 (en) * | 2002-05-28 | 2006-05-09 | Lippitt Extractor Company, Llc | Grasper mechanism with biased fixed flexure elements |
| US7044956B2 (en) | 2002-07-03 | 2006-05-16 | Rubicor Medical, Inc. | Methods and devices for cutting and collecting soft tissue |
| US20040006355A1 (en) | 2002-07-03 | 2004-01-08 | Rubicor Medical, Inc. | Methods and devices for cutting and collecting soft tissue |
| CA2455538A1 (en) * | 2002-08-21 | 2004-02-21 | Neothermia Corporation | Device and method for minimally invasive and intact recovery of tissue |
| GB0221707D0 (en) * | 2002-09-18 | 2002-10-30 | Gyrus Medical Ltd | Electrical system |
| US7122011B2 (en) | 2003-06-18 | 2006-10-17 | Rubicor Medical, Inc. | Methods and devices for cutting and collecting soft tissue |
| US7494473B2 (en) * | 2003-07-30 | 2009-02-24 | Intact Medical Corp. | Electrical apparatus and system with improved tissue capture component |
| AU2006227443B2 (en) * | 2005-03-17 | 2011-06-16 | David B. Dowling | Control apparatus, system, and method for reduction and/or prevention of space weather induced corrosion |
| US7569053B2 (en) * | 2006-03-03 | 2009-08-04 | Intact Medical Corporation | Apparatus for retrieving a tissue volume with improved positioning precursor assembly |
| US8486060B2 (en) * | 2006-09-18 | 2013-07-16 | Cytyc Corporation | Power ramping during RF ablation |
| US8588885B2 (en) * | 2007-05-09 | 2013-11-19 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Bendable catheter arms having varied flexibility |
| US8934984B2 (en) * | 2007-05-31 | 2015-01-13 | Cochlear Limited | Behind-the-ear (BTE) prosthetic device with antenna |
| US20090048595A1 (en) * | 2007-08-14 | 2009-02-19 | Takashi Mihori | Electric processing system |
| ES2944288T3 (es) * | 2008-03-31 | 2023-06-20 | Applied Med Resources | Sistema electroquirúrgico con medios para determinar el final de un tratamiento en base a un ángulo de fase |
| US20090254077A1 (en) * | 2008-04-08 | 2009-10-08 | Tyco Healthcare Group Lp | Arc Generation in a Fluid Medium |
| US8137308B2 (en) * | 2008-09-16 | 2012-03-20 | Biosense Webster, Inc. | Catheter with adjustable deflection sensitivity |
| US9532827B2 (en) * | 2009-06-17 | 2017-01-03 | Nuortho Surgical Inc. | Connection of a bipolar electrosurgical hand piece to a monopolar output of an electrosurgical generator |
| WO2011008672A2 (en) * | 2009-07-15 | 2011-01-20 | Ethicon Endo-Surgery, Inc. | Electrosurgery generator for ultrasonic surgical instruments |
| US20110071516A1 (en) * | 2009-09-24 | 2011-03-24 | Tyco Healthcare Group Lp | System and Method for Controlling Electrosurgical Output |
| GB201021032D0 (en) * | 2010-12-10 | 2011-01-26 | Creo Medical Ltd | Electrosurgical apparatus |
| EP3871617A1 (en) * | 2011-03-09 | 2021-09-01 | Neuravi Limited | A clot retrieval device for removing occlusive clot from a blood vessel |
| US8968293B2 (en) * | 2011-04-12 | 2015-03-03 | Covidien Lp | Systems and methods for calibrating power measurements in an electrosurgical generator |
| JP5697798B2 (ja) * | 2011-04-22 | 2015-04-08 | トペラ インコーポレイテッド | 心臓リズム障害を検出するための可撓性電極アセンブリを有するバスケットスタイル心臓マッピングカテーテル |
| US9044238B2 (en) * | 2012-04-10 | 2015-06-02 | Covidien Lp | Electrosurgical monopolar apparatus with arc energy vascular coagulation control |
| US9106270B2 (en) * | 2012-10-02 | 2015-08-11 | Covidien Lp | Transmitting data across a patient isolation barrier using an electric-field capacitive coupler module |
| US9039633B2 (en) | 2012-12-24 | 2015-05-26 | Transmed7, Llc | Automated, selectable, soft tissue excision biopsy devices and methods |
| DE102013202526A1 (de) * | 2013-02-15 | 2014-08-21 | Olympus Winter & Ibe Gmbh | Elektrochirurgisches Handinstrument mit erweiterter Funktionalität |
| US9456862B2 (en) * | 2013-02-19 | 2016-10-04 | Covidien Lp | Electrosurgical generator and system |
| US9655673B2 (en) * | 2013-03-11 | 2017-05-23 | Covidien Lp | Surgical instrument |
| JP2016512742A (ja) * | 2013-03-15 | 2016-05-09 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 組織切除スネア |
| US9155527B2 (en) | 2013-08-22 | 2015-10-13 | Transmed7, Llc | Soft tissue coring biopsy devices and methods |
| US9204929B2 (en) * | 2013-09-16 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Basket catheter with deflectable spine |
| US9808268B2 (en) * | 2013-11-27 | 2017-11-07 | Boston Scientific Scimed, Inc. | Medical retrieval devices and related methods of use |
| WO2015142674A1 (en) | 2014-03-15 | 2015-09-24 | Rioux Robert F | System and method for marginal tissue ablation |
| CN104257427A (zh) * | 2014-08-05 | 2015-01-07 | 上海魅丽纬叶医疗科技有限公司 | 具有瓣状支架结构的射频消融导管及其设备 |
-
2016
- 2016-08-12 CA CA2995615A patent/CA2995615A1/en not_active Abandoned
- 2016-08-12 AU AU2016305076A patent/AU2016305076B2/en active Active
- 2016-08-12 CA CA2995612A patent/CA2995612A1/en not_active Abandoned
- 2016-08-12 US US15/235,891 patent/US10363079B2/en active Active
- 2016-08-12 KR KR1020187007301A patent/KR20180039720A/ko not_active Application Discontinuation
- 2016-08-12 WO PCT/US2016/046768 patent/WO2017027800A1/en active Application Filing
- 2016-08-12 CN CN201680059880.7A patent/CN108366819B/zh active Active
- 2016-08-12 EP EP16835973.5A patent/EP3334361B1/en active Active
- 2016-08-12 JP JP2018506872A patent/JP6777727B2/ja active Active
- 2016-08-12 WO PCT/US2016/046788 patent/WO2017027809A1/en active Application Filing
- 2016-08-12 US US15/235,860 patent/US11129660B2/en active Active
- 2016-08-12 EP EP16835980.0A patent/EP3334358B1/en active Active
- 2016-08-12 KR KR1020187007296A patent/KR20180040670A/ko not_active Application Discontinuation
- 2016-08-12 AU AU2016306667A patent/AU2016306667B2/en not_active Ceased
- 2016-08-12 CN CN201680059823.9A patent/CN108366823B/zh active Active
- 2016-08-12 JP JP2018506879A patent/JP6891165B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108366819B (zh) | 2021-05-28 |
| AU2016305076A1 (en) | 2018-04-12 |
| EP3334361A4 (en) | 2019-06-19 |
| EP3334361A1 (en) | 2018-06-20 |
| CN108366819A (zh) | 2018-08-03 |
| KR20180039720A (ko) | 2018-04-18 |
| EP3334358A1 (en) | 2018-06-20 |
| EP3334361B1 (en) | 2022-02-16 |
| AU2016305076B2 (en) | 2020-09-10 |
| AU2016306667B2 (en) | 2020-12-03 |
| US20170156780A1 (en) | 2017-06-08 |
| JP2018529406A (ja) | 2018-10-11 |
| KR20180040670A (ko) | 2018-04-20 |
| WO2017027800A1 (en) | 2017-02-16 |
| EP3334358B1 (en) | 2024-04-17 |
| CA2995612A1 (en) | 2017-02-16 |
| US10363079B2 (en) | 2019-07-30 |
| WO2017027809A1 (en) | 2017-02-16 |
| CN108366823A (zh) | 2018-08-03 |
| CA2995615A1 (en) | 2017-02-16 |
| JP2018525101A (ja) | 2018-09-06 |
| AU2016306667A1 (en) | 2018-04-05 |
| EP3334358A4 (en) | 2019-08-21 |
| JP6777727B2 (ja) | 2020-10-28 |
| US11129660B2 (en) | 2021-09-28 |
| CN108366823B (zh) | 2021-04-27 |
| US20170095286A1 (en) | 2017-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6891165B2 (ja) | 電気外科発電機および方法 | |
| US9326810B2 (en) | Multi-button electrosurgical apparatus | |
| KR102304488B1 (ko) | 전기 수술 프로브에 의해 전달되는 전력을 제어하는 방법 및 장치 | |
| EP2174612B1 (en) | Forceps for performing an electrosurgical procedure | |
| JP5685008B2 (ja) | 虚数インピーダンス処理モニタリングおよびインテリジェント遮断 | |
| US8535312B2 (en) | Apparatus, system and method for performing an electrosurgical procedure | |
| US8628524B2 (en) | Return electrode detection and monitoring system and method thereof | |
| JP2012081266A (ja) | 電気外科的コブエレベータ器具 | |
| KR102292760B1 (ko) | Rf 펄스 프로파일 제어기를 구비하는 전기 수술 장치 | |
| CA2907309C (en) | Rf tissue ablation devices and methods of using the same | |
| KR101576092B1 (ko) | 과전류 보호 기능을 가지는 전기적 외과 수술 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180418 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190718 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210430 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210526 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6891165 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |