JP6887129B2 - 撮像装置、撮像システムおよび光検出方法 - Google Patents
撮像装置、撮像システムおよび光検出方法 Download PDFInfo
- Publication number
- JP6887129B2 JP6887129B2 JP2017089431A JP2017089431A JP6887129B2 JP 6887129 B2 JP6887129 B2 JP 6887129B2 JP 2017089431 A JP2017089431 A JP 2017089431A JP 2017089431 A JP2017089431 A JP 2017089431A JP 6887129 B2 JP6887129 B2 JP 6887129B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- sensitivity control
- cell
- sensitivity
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 481
- 238000000034 method Methods 0.000 title description 23
- 230000035945 sensitivity Effects 0.000 claims description 388
- 230000008859 change Effects 0.000 claims description 181
- 238000006243 chemical reaction Methods 0.000 claims description 117
- 238000001514 detection method Methods 0.000 claims description 67
- 230000002123 temporal effect Effects 0.000 claims description 37
- 238000012885 constant function Methods 0.000 claims description 14
- 230000006870 function Effects 0.000 description 168
- 230000000737 periodic effect Effects 0.000 description 55
- 238000003860 storage Methods 0.000 description 51
- 230000000875 corresponding effect Effects 0.000 description 44
- 239000010410 layer Substances 0.000 description 43
- 238000005286 illumination Methods 0.000 description 28
- 239000004065 semiconductor Substances 0.000 description 22
- 238000000701 chemical imaging Methods 0.000 description 21
- 239000000758 substrate Substances 0.000 description 20
- 230000005284 excitation Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 18
- 239000012535 impurity Substances 0.000 description 18
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 17
- 238000005259 measurement Methods 0.000 description 17
- 229910052760 oxygen Inorganic materials 0.000 description 17
- 239000001301 oxygen Substances 0.000 description 17
- 206010028980 Neoplasm Diseases 0.000 description 16
- 239000011159 matrix material Substances 0.000 description 11
- 238000009825 accumulation Methods 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 7
- 230000001678 irradiating effect Effects 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000004458 analytical method Methods 0.000 description 5
- ZGXJTSGNIOSYLO-UHFFFAOYSA-N 88755TAZ87 Chemical compound NCC(=O)CCC(O)=O ZGXJTSGNIOSYLO-UHFFFAOYSA-N 0.000 description 4
- 229960002749 aminolevulinic acid Drugs 0.000 description 4
- 230000002238 attenuated effect Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 238000011161 development Methods 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 239000011229 interlayer Substances 0.000 description 4
- 238000013507 mapping Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 4
- 229920005591 polysilicon Polymers 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 238000005033 Fourier transform infrared spectroscopy Methods 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 230000003321 amplification Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 201000011510 cancer Diseases 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012886 linear function Methods 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000003199 nucleic acid amplification method Methods 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000009792 diffusion process Methods 0.000 description 2
- 230000005669 field effect Effects 0.000 description 2
- 238000002292 fluorescence lifetime imaging microscopy Methods 0.000 description 2
- 239000007850 fluorescent dye Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 239000011368 organic material Substances 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 239000002356 single layer Substances 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- 229910006404 SnO 2 Inorganic materials 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910021417 amorphous silicon Inorganic materials 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000002513 implantation Methods 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 1
- 150000004767 nitrides Chemical class 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 230000006798 recombination Effects 0.000 description 1
- 238000005215 recombination Methods 0.000 description 1
- 238000000611 regression analysis Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000002366 time-of-flight method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
Images


























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/1446—Devices controlled by radiation in a repetitive configuration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/32—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S17/36—Systems determining position data of a target for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated with phase comparison between the received signal and the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/491—Details of non-pulse systems
- G01S7/4912—Receivers
- G01S7/4913—Circuits for detection, sampling, integration or read-out
- G01S7/4914—Circuits for detection, sampling, integration or read-out of detector arrays, e.g. charge-transfer gates
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14601—Structural or functional details thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L27/00—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate
- H01L27/14—Devices consisting of a plurality of semiconductor or other solid-state components formed in or on a common substrate including semiconductor components sensitive to infrared radiation, light, electromagnetic radiation of shorter wavelength or corpuscular radiation and specially adapted either for the conversion of the energy of such radiation into electrical energy or for the control of electrical energy by such radiation
- H01L27/144—Devices controlled by radiation
- H01L27/146—Imager structures
- H01L27/14665—Imagers using a photoconductor layer
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/56—Cameras or camera modules comprising electronic image sensors; Control thereof provided with illuminating means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/71—Circuitry for evaluating the brightness variation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/57—Control of the dynamic range
- H04N25/58—Control of the dynamic range involving two or more exposures
- H04N25/581—Control of the dynamic range involving two or more exposures acquired simultaneously
- H04N25/585—Control of the dynamic range involving two or more exposures acquired simultaneously with pixels having different sensitivities within the sensor, e.g. fast or slow pixels or pixels having different sizes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/77—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Power Engineering (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Studio Devices (AREA)
- Solid State Image Pick-Up Elements (AREA)
Description
強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
少なくとも1つの撮像セルは、
被写体からの光を受けて信号電荷を生成する光電変換部と、
信号電荷を検出する信号検出回路と、
を有し、
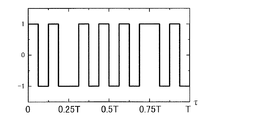
少なくとも1つの感度制御線は、少なくとも1つの撮像セルのリセットから、露光によって少なくとも1つの撮像セルに蓄積される信号電荷の読み出しまでの露光期間において、直交系をなす関数系の基底のうちの1つに定数を加えた、正の値をとる関数によって表される波形を有する感度制御信号を少なくとも1つの撮像セルに供給する、撮像システム。
照明装置は、光の強度を周期的に変化させる、項目1に記載の撮像システム。
少なくとも1つの撮像装置は、感度制御信号を光の強度の時間的変化に同期させる同期化回路を有する、項目1または2に記載の撮像システム。
少なくとも1つの照明装置および少なくとも1つの撮像装置は、
第1照明装置および第1撮像装置の組と、第2照明装置および第2撮像装置の組と、
を含み、
第1撮像装置における感度制御信号の波形は、基底のうちの1つに第1定数を加えた、正の値をとる第1関数によって表される波形を有し、
第2撮像装置における感度制御信号の波形は、基底のうちの他の1つに第2定数を加えた、正の値をとる第2関数によって表される波形を有する、項目1から3のいずれかに記載の撮像システム。
基底のうちの1つは、三角関数である、項目1から4のいずれかに記載の撮像システム。
基底のうちの1つは、定数関数ではないウォルシュ関数である、項目1から4のいずれかに記載の撮像システム。
少なくとも1つの感度制御線は、
露光期間において、正の値をとる関数によって表される波形を有する第1感度制御信号を少なくとも1つの撮像セルに供給し、
露光期間よりも後の第2の露光期間において、正の値をとる関数を時間的にシフトさせた関数によって表される波形を有する第2感度制御信号を少なくとも1つの撮像セルに供給する、項目1から6のいずれかに記載の撮像システム。
少なくとも1つの感度制御線は、
露光期間において、正の値をとる関数によって表される波形を有する第1感度制御信号を少なくとも1つの撮像セルに供給し、
露光期間よりも後の第2の露光期間において、定数関数によって表される波形を有する第2感度制御信号を少なくとも1つの撮像セルに供給する、項目1から6のいずれかに記載の撮像システム。
少なくとも1つの撮像セルは、第1撮像セルおよび第2撮像セルを含み、
少なくとも1つの感度制御線は、第1撮像セルに電気的に接続された第1感度制御線および第2撮像セルに電気的に接続された第2感度制御線を含み、
第1感度制御線は、露光期間において、正の値をとる関数によって表される波形を有する第1感度制御信号を第1撮像セルに供給し、
第2感度制御線は、露光期間において、正の値をとる関数を時間的にシフトさせた関数によって表される波形を有する第2感度制御信号を第2撮像セルに供給する、項目1から6のいずれかに記載の撮像システム。
少なくとも1つの撮像セルは、第1撮像セルおよび第2撮像セルを含み、
少なくとも1つの感度制御線は、第1撮像セルに電気的に接続された第1感度制御線および第2撮像セルに電気的に接続された第2感度制御線を含み、
第1感度制御線は、露光期間において、正の値をとる関数によって表される波形を有する第1感度制御信号を第1撮像セルに供給し、
第2感度制御線は、露光期間において、定数関数によって表される波形を有する第2感度制御信号を第2撮像セルに供給する、項目1から6のいずれかに記載の撮像システム。
直交系は、完全直交系である、項目1から10のいずれかに記載の撮像システム。
強度がパルス状に変化する光を被写体に放射する少なくとも1つの照明装置と、
被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
少なくとも1つの撮像セルは、
被写体からの光を受けて信号電荷を生成する光電変換部と、
信号電荷を検出する信号検出回路と、
を有し、
少なくとも1つの感度制御線は、少なくとも1つの撮像セルのリセットから、露光によって少なくとも1つの撮像セルに蓄積される信号電荷の読み出しまでの露光期間において、パルス波形を有する感度制御信号を少なくとも1つの撮像セルに供給する、撮像システム。
少なくとも1つの撮像装置は、感度制御信号を光の強度の時間的変化に同期させる同期化回路を有する、項目12に記載の撮像システム。
少なくとも1つの撮像セルは、複数の撮像セルである、項目12または13に記載の撮像システム。
少なくとも1つの感度制御線は、複数の撮像セルに共通の感度制御信号を供給する、項目14に記載の撮像システム。
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を備え、
少なくとも1つの撮像セルは、
光の入射によって信号電荷を生成する光電変換部と、
信号電荷を検出する信号検出回路と、
を有し、
少なくとも1つの感度制御線は、少なくとも1つの撮像セルのリセットから、露光によって少なくとも1つの撮像セルに蓄積される信号電荷の読み出しまでの露光期間において、直交系をなす関数系の基底のうちの1つに定数を加えた、正の値をとる関数によって表される波形を有する感度制御信号を少なくとも1つの撮像セルに供給する、撮像装置。
信号検出回路は、少なくとも1つの感度制御線に接続された増幅器を有し、
増幅器の露光期間における増幅率は、正の値をとる関数によって表される変化を示す、項目16に記載の撮像装置。
信号検出回路は、
信号検出トランジスタと、
信号検出トランジスタの入力に接続された電荷蓄積領域と、
電荷排出領域と、
光電変換部と電荷蓄積領域および電荷排出領域との間に接続された切り替え回路であって、少なくとも1つの感度制御線に接続された切り替え回路と、
を有し、
切り替え回路は、感度制御信号に基づいて、露光期間の一部において光電変換部を電荷蓄積領域に接続し、露光期間の残余の期間において光電変換部を電荷排出領域に接続する、項目16に記載の撮像装置。
光電変換部は、少なくとも1つの感度制御信号線に接続された電極を有するアバランシェフォトダイオードを含む、項目16に記載の撮像装置。
光電変換部は、
第1電極と、
少なくとも1つの感度制御線に接続された、透光性の第2電極と、
第1電極および第2電極の間に配置された光電変換層と、
を有する、項目16から18のいずれかに記載の撮像装置。
少なくとも1つの撮像セルは、複数の撮像セルである、項目16から20のいずれかに記載の撮像装置。
少なくとも1つの感度制御線は、複数の撮像セルに共通の感度制御信号を供給する、項目21に記載の撮像装置。
輝度が時間的に変化する被写体に、1以上の撮像セルを有する撮像装置の撮像面を向ける工程(a)と、
1以上の撮像セルのリセット後、1以上の撮像セルのうちの少なくとも一部の撮像セルにおける第1感度を変化させながら露光を実行する工程(b)と、
を含み、
工程(b)において、第1感度の変化を表す波形は、直交系をなす関数系の基底のうちの1つに第1定数を加えた、正の値をとる第1関数によって表される形状を有する、光検出方法。
工程(a)は、
強度が時間的に変化する光で被写体を照射する工程(a1)
を含む、項目23に記載の光検出方法。
工程(b)は、
第1感度の変化を光の時間的な強度の変化に同期させる工程(b1)
を含む、項目24に記載の光検出方法。
1以上の撮像セルのリセット後、1以上の撮像セルのうちの他の一部の撮像セルにおける第2感度を変化させながら露光を実行する工程(c)
をさらに含み、
第1関数は、周期関数であり、
第2感度の変化を示す波形は、第1感度の変化を表す波形に対して位相および/または周期が異なる、項目23から25のいずれかに記載の光検出方法。
1以上の撮像セルのリセット後、1以上の撮像セルのうちの他の一部の撮像セルにおける第2感度を固定して露光を実行する工程(c)
をさらに含む、項目23から25のいずれかに記載の光検出方法。
工程(c)は、工程(b)の後に実行される、項目26または27に記載の光検出方法。
工程(b)および工程(c)は、同時に実行される、項目26または27に記載の光検出方法。
工程(b)において取得される画像信号と、工程(c)において取得される画像信号との間の差分に基づいて画像を形成する工程(d)をさらに含む、項目26から29のいずれかに記載の光検出方法。
輝度が時間的に変化する被写体に、1以上の撮像セルを有する撮像装置の撮像面を向ける工程(a)と、
1以上の撮像セルのリセット後、1以上の撮像セルのうちの少なくとも一部の撮像セルにおける第1感度を変化させながら露光を実行する工程(b)と、
を含み、
工程(b)において、第1感度の変化を表す波形は、パルス形状を有する、光検出方法。
工程(a)は、
強度がパルス状に変化する光で被写体を照射する工程(a1)
を含む、項目31に記載の光検出方法。
工程(b)は、
第1感度の変化を光の時間的な強度の変化に同期させる工程(b1)
を含む、項目32に記載の光検出方法。
それぞれが第1光電変換部を有する1以上の第1撮像セルと、
第1信号線と、
それぞれが第2光電変換部を有する1以上の第2撮像セルと、
第2信号線と、
を備え、
第1光電変換部は、
第1電極と、
第1信号線に電気的に接続された、透光性の第2電極と、
第1電極および第2電極の間に配置された第1光電変換層と、
を含み、
第2光電変換部は、
第3電極と、
第2信号線に電気的に接続された、透光性の第4電極と、
第3電極および第4電極の間に配置された第2光電変換層と、
を含み、
第1信号線は、1以上の第1撮像セルのリセットから、露光によって1以上の第1撮像セルに蓄積される信号電荷の読み出しまでの露光期間において、直交系をなす関数系の基底のうちの1つに定数を加えた、正の値をとる関数によって表される波形を有する第1信号を1以上の第1撮像セルに供給し、
第2信号線は、露光期間において、第1信号とは異なる時間変化を示す波形を有する第2信号を1以上の第2撮像セルに供給する、撮像装置。
第1信号線に第1信号を供給する第1信号源と、
第2信号線に第2信号を供給する第2信号源と、
をさらに備える、項目34に記載の撮像装置。
第1信号線に接続された信号源と、
第2信号線および信号源との間に接続された移相器と、
をさらに備える、項目34に記載の撮像装置。
第1信号および第2信号は、露光期間において周期的な変化を示す信号であり、
第1信号および第2信号の周期および位相の少なくとも一方は、互いに異なる、項目34から36のいずれかに記載の撮像装置。
第2信号源は、直流信号源である、項目35に記載の撮像装置。
第1光電変換層および第2光電変換層は、連続した単一の層である、項目34から38のいずれかに記載の撮像装置。
1以上の第1撮像セルは、複数の第1撮像セルであり、
1以上の第2撮像セルは、複数の第2撮像セルである、項目34から39のいずれかに記載の撮像装置。
第1信号線は、複数の第1撮像セルに共通の第1信号を供給し、
第2信号線は、複数の第2撮像セルに共通の第2信号を供給する、項目40に記載の撮像装置。
図1は、本開示の第1の実施形態による撮像装置の例示的な構成を模式的に示す。図1に示す撮像装置100は、1以上の撮像セル10を有する。ここでは、撮像装置100が複数の撮像セル10を含む構成を例示する。撮像セル10の数は、特定の数に限定されない。例えば撮像セル10の数が1つであれば、撮像装置100を光検出素子として利用し得るし、撮像セル10の数が複数、かつ、それらの撮像セル10が1次元または2次元に配列されていれば、撮像装置100をイメージセンサとして利用し得る。後述するように、撮像セル10の各々は、感度を変更可能な構成を有する。
は、制御回路99は、感度制御信号の波形が所望の波形となるように、生成すべき感度制御信号の波形に応じた駆動信号を電圧供給回路92に供給する。生成すべき感度制御信号の波形に対応した波形を有する制御信号が外部から制御回路99または電圧供給回路92に与えられてもよい。制御回路99により、撮像面から被写体までの距離の算出などの上述の計算処理が実行されてもよい。
図3は、撮像セル10の例示的なデバイス構造を模式的に示す。図3に例示する構成では、上述の信号検出トランジスタ22、アドレストランジスタ24およびリセットトランジスタ26が、半導体基板20に形成されている。半導体基板20は、その全体が半導体である基板に限定されない。半導体基板20は、撮像領域が形成される側の表面に半導体層が設けられた絶縁基板などであってもよい。ここでは、半導体基板20としてP型シリコン(Si)基板を用いる例を説明する。
次に、露光期間中の照度の変化から特定の成分を抽出する原理を説明する。理解を容易にするために、以下では、まず、具体例として、露光期間中の照度の変化から、特定の振動数で変動する振幅を有する成分を抽出する方法を説明する。

式(7)中の第2項は、照度Lおよび感度Sが負の値をとらないことに起因してオフセットが生じることを示している。このオフセットは、式(7)で示される信号電荷量に対応する画像信号から、第2項に示される信号電荷量に対応する画像信号を減算することによってキャンセルすることができる。
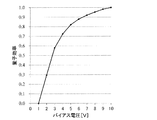
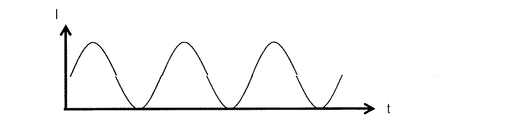
を有する被写体を撮影することによって得られた画像の例を示す。ここでは、駆動電圧が正弦関数的に変化させられたLEDから発せられた光で被写体を照射することにより、被写体の輝度に周期的な変化を与え、透明電極12cに印加するバイアス電圧(感度調整信号)を3kHzの周期で正弦関数的に変化させることにより、撮像セル10の感度を3kHzの周期で変化させている。いずれも、撮影における露光期間は、およそ20m秒(ミリ秒)としている。
上述の例では、照度L(τ)が、振幅がωmの振動数で変化する光の重ねあわせによって表現可能であると仮定している。厳密には、光電変換部12に入射する光が、振動数ωmで振幅が変化するような光の重ねあわせであるとは限らない。しかしながら、後述するように、被写体に向けて光を照射することによって、被写体に積極的に輝度の変化を生じさせることが可能であり、例えば周期的に強度が変化するような光を被写体に照射すれば、被写体表面で反射した光に周期的な変化を生じさせ得る。すなわち、周期Tの周期関数によって表現されるような照度の変化を実現し得る。
1)を得る。
撮像セルの感度に変調を与える構成は、上述した例に限定されない。図17は、感度の変調が可能な撮像セルの回路構成の例を示す。図17に示す撮像セル50は、感度制御線82に接続された増幅器52を含む信号検出回路14Gを有する。図17に例示する構成において、増幅器52は、光電変換部12と信号検出トランジスタ22の入力との間に接続されている。増幅器52は、例えば可変ゲインアンプであり、感度制御線82は、可変ゲインアンプのゲイン制御端子に接続される。なお、この例では、光電変換部12に電圧線81が接続されている。電圧線81は、透明電極12c(図17において不図示)に接続されており、撮像装置100の動作時、透明電極12cに所定のバイアス電圧を供給する。このバイアス電圧は、典型的には、固定された電圧である。
以上に説明したように、被写体の輝度がある規則に従って変化するような場合、その規則に関連を有する規則に従って撮像セルの感度を露光期間において変化させることにより、被写体の輝度の時間的変化から、特定の成分に関する情報を抽出することが可能である。例えば、被写体の輝度の変化が、ある振動数で変化する成分を含むとき、撮像セルの感度の変調における振動数をその振動数に一致させることにより、その振動数で強度が変化する光で選択的に被写体を照射したときと同様の画像が得られる。
例えば、撮像装置100と、強度が時間的に変化する光を発する照明装置とを用いて、分光イメージングシステムを実現し得る。本開示の撮像システムの有利な点の理解を容易とするために、まず、従来のフーリエ変換型赤外分光光度計の構成および動作を説明する。
腫瘍に特異的に蓄積される蛍光色素分子を利用して腫瘍の位置を特定する蛍光診断が知られている。蛍光診断においては、患者に5−アミノレブリン酸(5-ALA)を投与し、施術を行うとする部位を励起光で照射する。5−アミノレブリン酸は、腫瘍に特異的に蓄積されるので、5−アミノレブリン酸から発せられる蛍光を標識として、腫瘍の形状および位置を特定することができる。しかしながら、この蛍光があまり強くないために、蛍光を観察するには、周囲の照明を落とす必要がある。
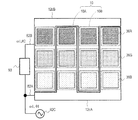
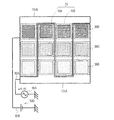
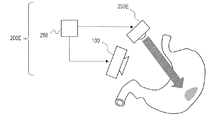
図26は、本開示の実施形態による撮像システムを物標検出システムに適用した例を示す。図26に示す撮像システム200Aおよび200Bは、それぞれ、照明装置250Aと撮像装置100Aとの組、および、照明装置250Bと撮像装置100Bとの組を含む。撮像装置100Aおよび100Bとしては、上述の撮像装置100と同様の構成を適用し得る。撮像システム200Aおよび200Bは、例えば乗用車などの車両に搭載され得る物標検出システムであり得る。撮像システム200Aおよび200Bは、位置が固定された定点撮像システムであってもよい。
感度の変調に有用な関数としてデルタ関数も例示できる。以下に説明するように、パルス波形を有する感度制御信号を用いることにより、例えば、生体組織内の酸素濃度のマッピングが可能である。以下では、生体組織に取り込まれた発光プローブからの燐光を撮像装置100を用いて撮影する例を説明する。
50、60、70 撮像セル
12、12A、12B、12P 光電変換部
12a、12aA、12aB 画素電極
12b、12bA、12bB 光電変換層
12c、12cA、12cB 透明電極
14、14D、14G 信号検出回路
22 信号検出トランジスタ
52 増幅器
62 切り替え回路
72 アバランシェフォトダイオード
82、82A、82B 感度制御線
92、92A〜92C 電圧供給回路
92D 直流信号源
93 移相器
99 制御回路
100、100A、100B 撮像装置
200A、200B 撮像システム(物標検出システム)
200E 腫瘍観察システム
200F 燐光観察システム
200P 分光イメージングシステム
250、250A、250B 照明装置
250E、250F、250P 照明装置
256 同期化回路
300 物標検出システム
Claims (12)
- 強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
前記被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
前記少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
前記少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
前記少なくとも1つの撮像セルは、
前記被写体からの光を受けて信号電荷を生成する光電変換部と、
前記信号電荷を検出する信号検出回路と、
を有し、
前記少なくとも1つの感度制御線は、前記少なくとも1つの撮像セルのリセットから、露光によって前記少なくとも1つの撮像セルに蓄積される前記信号電荷の読み出しまでの露光期間において、第1感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記露光期間よりも後の第2の露光期間において、定数関数によって表される波形を有する第2感度制御信号を前記少なくとも1つの撮像セルに供給する、撮像システム。 - 前記少なくとも1つの照明装置は、前記光の強度を周期的に変化させる、請求項1に記載の撮像システム。
- 前記少なくとも1つの撮像装置は、前記第1感度制御信号を前記光の強度の時間的変化に同期させる同期化回路を有する、請求項1または2に記載の撮像システム。
- 前記第1感度制御信号の波形は、三角関数で表される波形である、請求項1から3のいずれかに記載の撮像システム。
- 前記第1感度制御信号の波形は、定数関数ではないウォルシュ関数で表される波形である、請求項1から4のいずれかに記載の撮像システム。
- 強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
前記被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
前記少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
前記少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
前記少なくとも1つの撮像セルは、
前記被写体からの光を受けて信号電荷を生成する光電変換部と、
前記信号電荷を検出する信号検出回路と、
を有し、
前記少なくとも1つの感度制御線は、前記少なくとも1つの撮像セルのリセットから、露光によって前記少なくとも1つの撮像セルに蓄積される前記信号電荷の読み出しまでの露光期間において、感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記少なくとも1つの照明装置および前記少なくとも1つの撮像装置は、
第1照明装置および第1撮像装置の組と、第2照明装置および第2撮像装置の組と、
を含み、
前記第1撮像装置における前記感度制御信号の波形は、第1関数によって表される波形を有し、
前記第2撮像装置における前記感度制御信号の波形は、前記第1関数とは異なる第2関数によって表される波形を有する、撮像システム。 - 前記感度制御信号の波形は、三角関数で表される波形である、請求項6に記載の撮像システム。
- 前記感度制御信号の波形は、定数関数ではないウォルシュ関数で表される波形である、請求項6に記載の撮像システム。
- 前記少なくとも1つの感度制御線は、
前記露光期間において、第1感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記露光期間よりも後の第2の露光期間において、前記第1感度制御信号の波形を時間的にシフトさせた波形を有する第2感度制御信号を前記少なくとも1つの撮像セルに供給する、請求項6から8のいずれかに記載の撮像システム。 - 強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
前記被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
前記少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
前記少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
前記少なくとも1つの撮像セルは、
前記被写体からの光を受けて信号電荷を生成する光電変換部と、
前記信号電荷を検出する信号検出回路と、
を有し、
前記少なくとも1つの感度制御線は、前記少なくとも1つの撮像セルのリセットから、露光によって前記少なくとも1つの撮像セルに蓄積される前記信号電荷の読み出しまでの露光期間において、感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記少なくとも1つの撮像セルは、第1撮像セルおよび第2撮像セルを含み、
前記少なくとも1つの感度制御線は、前記第1撮像セルに電気的に接続された第1感度制御線および前記第2撮像セルに電気的に接続された第2感度制御線を含み、
前記第1感度制御線は、前記露光期間において、第1感度制御信号を前記第1撮像セルに供給し、
前記第2感度制御線は、前記露光期間において、前記第1感度制御信号の波形を時間的にシフトさせた波形を有する第2感度制御信号を前記第2撮像セルに供給する、撮像システム。 - 強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
前記被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
前記少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
前記少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
前記少なくとも1つの撮像セルは、
前記被写体からの光を受けて信号電荷を生成する光電変換部と、
前記信号電荷を検出する信号検出回路と、
を有し、
前記少なくとも1つの感度制御線は、前記少なくとも1つの撮像セルのリセットから、露光によって前記少なくとも1つの撮像セルに蓄積される前記信号電荷の読み出しまでの露光期間において、感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記少なくとも1つの撮像セルは、第1撮像セルおよび第2撮像セルを含み、
前記少なくとも1つの感度制御線は、前記第1撮像セルに電気的に接続された第1感度制御線および前記第2撮像セルに電気的に接続された第2感度制御線を含み、
前記第1感度制御線は、前記露光期間において、第1感度制御信号を前記第1撮像セルに供給し、
前記第2感度制御線は、前記露光期間において、定数関数によって表される波形を有する第2感度制御信号を前記第2撮像セルに供給する、撮像システム。 - 強度が時間的に変化する光を被写体に放射する少なくとも1つの照明装置と、
前記被写体からの光を検出する少なくとも1つの撮像装置と、
を備え、
前記少なくとも1つの撮像装置は、
それぞれが感度を変更可能な少なくとも1つの撮像セルと、
前記少なくとも1つの撮像セルに電気的に接続された少なくとも1つの感度制御線と、
を有し、
前記少なくとも1つの撮像セルは、
前記被写体からの光を受けて信号電荷を生成する光電変換部と、
前記信号電荷を検出する信号検出回路と、
を有し、
前記少なくとも1つの感度制御線は、前記少なくとも1つの撮像セルのリセットから、露光によって前記少なくとも1つの撮像セルに蓄積される前記信号電荷の読み出しまでの露光期間において、感度制御信号を前記少なくとも1つの撮像セルに供給し、
前記感度制御信号は、直交系をなす関数系の基底のうちの1つに定数を加えた、正の値をとる関数によって表される波形を有し、
前記直交系は、完全直交系である、撮像システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021075283A JP7108888B2 (ja) | 2016-05-11 | 2021-04-27 | 撮像装置、撮像システムおよび光検出方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095056 | 2016-05-11 | ||
| JP2016095055 | 2016-05-11 | ||
| JP2016095055 | 2016-05-11 | ||
| JP2016095056 | 2016-05-11 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021075283A Division JP7108888B2 (ja) | 2016-05-11 | 2021-04-27 | 撮像装置、撮像システムおよび光検出方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017208812A JP2017208812A (ja) | 2017-11-24 |
| JP2017208812A5 JP2017208812A5 (ja) | 2020-01-09 |
| JP6887129B2 true JP6887129B2 (ja) | 2021-06-16 |
Family
ID=58714905
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017089431A Active JP6887129B2 (ja) | 2016-05-11 | 2017-04-28 | 撮像装置、撮像システムおよび光検出方法 |
| JP2021075283A Active JP7108888B2 (ja) | 2016-05-11 | 2021-04-27 | 撮像装置、撮像システムおよび光検出方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021075283A Active JP7108888B2 (ja) | 2016-05-11 | 2021-04-27 | 撮像装置、撮像システムおよび光検出方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US10542228B2 (ja) |
| EP (1) | EP3253046B1 (ja) |
| JP (2) | JP6887129B2 (ja) |
| CN (1) | CN107370913B (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11230241B2 (en) | 2013-04-10 | 2022-01-25 | Holt Sales and Service, Inc. | Quick release grill guard and associated systems and methods |
| CA2848790C (en) | 2013-04-10 | 2016-01-26 | Excel Concepts | Quick release grill guard |
| CN107370913B (zh) * | 2016-05-11 | 2021-03-16 | 松下知识产权经营株式会社 | 摄像装置、摄像系统以及光检测方法 |
| JP6797568B2 (ja) * | 2016-06-10 | 2020-12-09 | キヤノン株式会社 | 撮像装置、撮像システム |
| US11337660B2 (en) | 2017-10-19 | 2022-05-24 | Spectrum Dynamics Medical Limited | Safety mechanisms for close range tomographic scanning machine and methods of use |
| WO2019077548A2 (en) * | 2017-10-19 | 2019-04-25 | Spectrum Dynamics Medical Limited | COOLING A TOMOGRAPHY SYSTEM OF NUCLEAR MEDICINE |
| EP3698326A4 (en) | 2017-10-19 | 2021-08-11 | Spectrum Dynamics Medical Limited | CALIBRATION AND QUALITY CONTROL OF A RADIO IMAGING SYSTEM FOR NUCLEAR MEDICINE (N-M) |
| EP3698176B1 (en) | 2017-10-19 | 2023-10-11 | Spectrum Dynamics Medical Limited | Moving parts in a nuclear medicine (n-m) imaging system |
| CN110139047B (zh) * | 2018-02-08 | 2023-06-20 | 松下知识产权经营株式会社 | 摄像装置及相机系统、以及摄像装置的驱动方法 |
| JP7019471B2 (ja) * | 2018-03-19 | 2022-02-15 | キヤノン株式会社 | 固体撮像装置及び撮像システム |
| US10893222B2 (en) | 2018-03-29 | 2021-01-12 | Panasonic Intellectual Property Management Co., Ltd. | Imaging device and camera system, and driving method of imaging device |
| CN110471402A (zh) * | 2018-05-09 | 2019-11-19 | 陕西外号信息技术有限公司 | 对能够自主移动的机器进行导引的系统和方法 |
| JP7310098B2 (ja) * | 2018-07-10 | 2023-07-19 | 富士通株式会社 | 赤外線検出器の制御回路及び制御方法、撮像装置 |
| KR102553314B1 (ko) | 2018-08-29 | 2023-07-10 | 삼성전자주식회사 | 이미지 센서 |
| WO2020105361A1 (ja) * | 2018-11-19 | 2020-05-28 | パナソニックIpマネジメント株式会社 | 撮像装置及び撮像システム |
| WO2021065367A1 (ja) | 2019-10-03 | 2021-04-08 | パナソニックIpマネジメント株式会社 | 撮像装置、撮像システムおよび撮像方法 |
| JP7510815B2 (ja) | 2020-02-20 | 2024-07-04 | 浜松ホトニクス株式会社 | 光干渉断層撮影装置 |
| WO2021166544A1 (ja) * | 2020-02-20 | 2021-08-26 | 浜松ホトニクス株式会社 | 光干渉断層撮影装置 |
| JP7471871B2 (ja) * | 2020-03-10 | 2024-04-22 | キヤノン株式会社 | 電子デバイス、システム及び電子デバイスの制御方法 |
| JPWO2021220656A1 (ja) * | 2020-04-27 | 2021-11-04 | ||
| TWI734499B (zh) * | 2020-05-28 | 2021-07-21 | 長庚大學 | 顯微鏡之結構 |
| CN114323313A (zh) * | 2021-12-24 | 2022-04-12 | 北京深测科技有限公司 | 一种基于iccd相机的成像方法和系统 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0695739B2 (ja) * | 1986-02-19 | 1994-11-24 | 株式会社東芝 | 固体撮像装置の駆動方法 |
| US5218558A (en) * | 1989-11-10 | 1993-06-08 | Ricoh Company, Ltd. | Output circuit of a charge-coupled device |
| JP3305083B2 (ja) * | 1993-12-22 | 2002-07-22 | キヤノン株式会社 | 光レーダ |
| JPH08313215A (ja) * | 1995-05-23 | 1996-11-29 | Olympus Optical Co Ltd | 2次元距離センサ |
| JP3631325B2 (ja) | 1996-06-19 | 2005-03-23 | オリンパス株式会社 | 3次元画像入力装置 |
| JP3607074B2 (ja) * | 1998-05-01 | 2005-01-05 | 株式会社ルネサステクノロジ | 画像感知および処理のための装置 |
| US6691297B1 (en) * | 1999-03-04 | 2004-02-10 | Matsushita Electric Industrial Co., Ltd. | Method for planning layout for LSI pattern, method for forming LSI pattern and method for generating mask data for LSI |
| JP3554224B2 (ja) * | 1999-06-02 | 2004-08-18 | キヤノン株式会社 | 光電変換装置 |
| JP2001153612A (ja) | 1999-11-25 | 2001-06-08 | Olympus Optical Co Ltd | 3次元撮像装置及び方法並びに干渉光生成装置 |
| US6906793B2 (en) * | 2000-12-11 | 2005-06-14 | Canesta, Inc. | Methods and devices for charge management for three-dimensional sensing |
| JP4031306B2 (ja) | 2002-07-12 | 2008-01-09 | 日本放送協会 | 3次元情報検出システム |
| US20050015612A1 (en) * | 2003-07-14 | 2005-01-20 | Jing-Lung You | Parent-children interactive intelligent management system |
| US7321111B2 (en) * | 2004-04-12 | 2008-01-22 | Canesta, Inc. | Method and system to enhance differential dynamic range and signal/noise in CMOS range finding systems using differential sensors |
| JP4452825B2 (ja) | 2004-08-05 | 2010-04-21 | 国立大学法人電気通信大学 | 静止画像形成方法及びその記録装置 |
| US20070285155A1 (en) * | 2004-08-18 | 2007-12-13 | Shinji Yano | Discrimination Circuit, Gain Adjustment Circuit, Signal Processing Circuit, and Electric Device |
| JP4543904B2 (ja) | 2004-11-30 | 2010-09-15 | パナソニック電工株式会社 | 距離画像センサ |
| JP4511442B2 (ja) | 2005-09-30 | 2010-07-28 | 富士フイルム株式会社 | 感度可変型撮像素子及びこれを搭載した撮像装置 |
| JP5019117B2 (ja) | 2007-11-14 | 2012-09-05 | スタンレー電気株式会社 | 距離画像生成装置 |
| JP5355026B2 (ja) * | 2008-10-09 | 2013-11-27 | キヤノン株式会社 | 撮像装置 |
| JP5146499B2 (ja) * | 2009-08-08 | 2013-02-20 | 株式会社ニコン | 固体撮像素子 |
| US8320621B2 (en) * | 2009-12-21 | 2012-11-27 | Microsoft Corporation | Depth projector system with integrated VCSEL array |
| FR2998666B1 (fr) | 2012-11-27 | 2022-01-07 | E2V Semiconductors | Procede de production d'images avec information de profondeur et capteur d'image |
| JP6090060B2 (ja) * | 2013-08-23 | 2017-03-08 | 株式会社豊田中央研究所 | シングルフォトンアバランシェダイオード |
| US10141354B2 (en) * | 2014-10-23 | 2018-11-27 | Panasonic Intellectual Property Management Co., Ltd. | Imaging device and image acquisition device |
| CN107370913B (zh) * | 2016-05-11 | 2021-03-16 | 松下知识产权经营株式会社 | 摄像装置、摄像系统以及光检测方法 |
-
2017
- 2017-03-28 CN CN201710191134.XA patent/CN107370913B/zh active Active
- 2017-04-24 EP EP17167663.8A patent/EP3253046B1/en active Active
- 2017-04-25 US US15/497,157 patent/US10542228B2/en active Active
- 2017-04-28 JP JP2017089431A patent/JP6887129B2/ja active Active
-
2019
- 2019-12-04 US US16/703,046 patent/US11025847B2/en active Active
-
2021
- 2021-04-27 JP JP2021075283A patent/JP7108888B2/ja active Active
- 2021-04-28 US US17/243,170 patent/US11438539B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11438539B2 (en) | 2022-09-06 |
| JP7108888B2 (ja) | 2022-07-29 |
| EP3253046A2 (en) | 2017-12-06 |
| JP2017208812A (ja) | 2017-11-24 |
| US20210266481A1 (en) | 2021-08-26 |
| US20170332025A1 (en) | 2017-11-16 |
| JP2021121120A (ja) | 2021-08-19 |
| US10542228B2 (en) | 2020-01-21 |
| EP3253046B1 (en) | 2023-11-15 |
| EP3253046A3 (en) | 2021-01-06 |
| US11025847B2 (en) | 2021-06-01 |
| CN107370913B (zh) | 2021-03-16 |
| CN107370913A (zh) | 2017-11-21 |
| US20200106978A1 (en) | 2020-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6887129B2 (ja) | 撮像装置、撮像システムおよび光検出方法 | |
| US7794394B2 (en) | Device for wavelength-selective imaging | |
| CN104081528B (zh) | 多光谱传感器 | |
| CN108291969B (zh) | 具有共享像素读出电路系统的成像传感器 | |
| US10397552B2 (en) | Time-of-flight camera system | |
| CN105705962B (zh) | 具有主动照明的传感器系统 | |
| US10924692B2 (en) | Depth and multi-spectral camera | |
| US10578739B2 (en) | Optoelectronic modules for the acquisition of spectral and distance data | |
| JP3906818B2 (ja) | 受光素子の感度制御方法、強度変調光を用いた空間情報の検出装置 | |
| JP2018531374A (ja) | 物体までの距離を測定するためのシステムおよび方法 | |
| JP2018531374A6 (ja) | 物体までの距離を測定するためのシステムおよび方法 | |
| US20140198183A1 (en) | Sensing pixel and image sensor including same | |
| US10708511B2 (en) | Three-dimensional motion obtaining apparatus and three-dimensional motion obtaining method | |
| JP2019529957A (ja) | 物体までの距離を測定するためのシステム | |
| TWI837107B (zh) | 像素結構、具像素結構之影像感測器裝置和系統、及操作該像素結構之方法 | |
| US11108957B1 (en) | Low power operation of differential image sensor pixels | |
| WO2021019973A1 (ja) | 撮像装置 | |
| US10418410B2 (en) | Optoelectronic modules operable to collect spectral data and distance data | |
| EP3579021B1 (en) | Three-dimensional motion acquisition device and three-dimensional motion acquisition method | |
| US8487274B2 (en) | Stroboscopic optical image mapping system | |
| US11742370B2 (en) | Time-of-flight pixel with vertical photogates | |
| Yang et al. | Fixed pattern noise pixel-wise linear correction for crime scene imaging CMOS sensor | |
| US20240222404A1 (en) | Image capture apparatus and methods using color co-site sampling | |
| Lioe | A Study on CMOS Image Sensors for Stimulated Raman Scattering Using High-Speed Lateral Electric Field Charge Modulators |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191121 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201027 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210330 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210427 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6887129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |