JP6881774B2 - 血流センサ及び血流測定装置 - Google Patents
血流センサ及び血流測定装置 Download PDFInfo
- Publication number
- JP6881774B2 JP6881774B2 JP2018503420A JP2018503420A JP6881774B2 JP 6881774 B2 JP6881774 B2 JP 6881774B2 JP 2018503420 A JP2018503420 A JP 2018503420A JP 2018503420 A JP2018503420 A JP 2018503420A JP 6881774 B2 JP6881774 B2 JP 6881774B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- blood flow
- sensor
- pressure
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000017531 blood circulation Effects 0.000 title claims description 102
- 230000003287 optical effect Effects 0.000 claims description 61
- 230000005540 biological transmission Effects 0.000 claims description 9
- 239000000872 buffer Substances 0.000 claims description 3
- 239000000523 sample Substances 0.000 description 43
- 238000005259 measurement Methods 0.000 description 34
- 238000000034 method Methods 0.000 description 24
- 230000002093 peripheral effect Effects 0.000 description 21
- 210000004204 blood vessel Anatomy 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 210000003743 erythrocyte Anatomy 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000003139 buffering effect Effects 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
- A61B5/0261—Measuring blood flow using optical means, e.g. infrared light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
- A61B5/0285—Measuring or recording phase velocity of blood waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6801—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be attached to or worn on the body surface
- A61B5/6843—Monitoring or controlling sensor contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6885—Monitoring or controlling sensor contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/746—Alarms related to a physiological condition, e.g. details of setting alarm thresholds or avoiding false alarms
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Hematology (AREA)
- Physiology (AREA)
- Cardiology (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
Description
血流測定装置10は、LDF(Laser Doppler Flowmetryの略)法により血流量を測定するものである。LDP法は、レーザ光を生体組織中に照射したときに赤血球で散乱される光のドップラシフトに基づく情報から、血流量を算出する方法である。
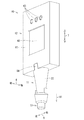
図3に示されるように、センサ部21は、センサチップ26と、センサ筐体27(筐体の一例)とを備えている。
図4に示されるように、センサチップ26は、血流量の測定において、血流量の情報を被験体から取得するものである。センサチップ26は、レーザダイオード31(レーザ素子の一例、以下、「LD」と称することがある。)と、フォトダイオード32(受光素子の一例、以下、「PD」と称することがある。)と、パッケージ33と、を備えている。
図3に示されるように、センサ筐体27は、センサチップ26を保持するものである。センサ筐体27は、概ね円柱形状を有している。センサ筐体27は、貫通孔41を有している。貫通孔41は、センサ筐体27において下面27Bを有する下壁の中心を上下方向7に貫通している。貫通孔41の内部には、例えば基板26Aに装着されたセンサチップ26が、下面36Aが下方に向くように配置される。センサチップ26又は基板26Aは、例えば、接着剤によってセンサ筐体27に固着される。
センサ筐体27の下面27Bには、圧力センサ24が位置する。圧力センサ24は、例えば、ピエゾ素子である。圧力センサ24の下面24Aと、センサチップ26の下面36Aとは、同一の仮想平面上に位置している。以下では、下面24Aと下面36Aとを含む面が「接触面44」と称される。
保持部22は、センサ筐体27を保持するものである。保持部22は、概ね円錐台形状である。保持部22の内部は、空洞である。保持部22は、延部51,52と、孔53,54とを有している。
図3に示されるように、コイルバネ23は、センサ筐体27の上壁27Cと保持部22の延部52との間に圧縮された状態で配置されている。図5に示されるように、コイルバネ23は、保持部22がセンサ筐体27に対して押圧向き81へ移動した状態において、保持部22からセンサ筐体27へ伝わる力を緩衝する。そのため、接触面44に被験体82が接触している状態で、保持部22が押圧向き81へ移動しても、接触面44から被験体82かかる力(以下、「接触圧力」と称する。)が変動しにくい。
本体部12は、センサチップ26から受信した血流に関する電気信号に基づいて血流量を算出し、その血流量を表示部62に表示するものである。図2に示されるように、本体部12は、本体筐体61と、表示部62と、操作部63と、コネクタ64とを備えている。
図1に示されるように、血流測定装置10は、着脱可能なキャップ13を備えている。キャップ13は、血流測定装置10に装着された状態において、センサ部21を被覆する。
図6に示されるように、本体部12は、制御部66(演算部の一例)と、電源部67と、信号処理部68とを更に備える。
信号処理部68から出力された駆動電流によりレーザダイオード31から被験体82にレーザが照射される。一方、フォトダイオード32は、レーザダイオード31から照射された光の反射光を受光し、受光した光を電気信号に変換して出力する。フォトダイオード32が受光した反射光は、血管などの静止組織からの散乱光と、赤血球などの移動組織からの散乱光である。移動組織からの散乱光は、ドップラシフトにより静止組織からの散乱光の周波数からずれた周波数を有している。これにより静止組織からの散乱光と移動組織からの散乱光とに干渉が生じ、光ビート(うねり)として観測される。この光ビートの周波数の情報が電気信号としてフォトダイオード32から出力される。制御部66は、光ビートの周波数に基づいて血流量を算出する。
図7に示される測定処理は、制御部66により実行される処理である。測定処理は、操作部63が電源オン操作されたことに基づいて実行される。電源オン操作は、例えば操作部63において電源オンに対応するボタンを測定者が押下する操作である。
以上のように、センサ筐体27の接触面44が被験体82(例えば人体の皮膚)に接触された状態で血流量が測定される。センサ筐体27は、保持部22に移動可能に保持されており、保持部22に加わる外力(例えば、測定者が血流測定装置10に加える力)がコイルバネ23によってセンサ筐体27へ緩衝して伝達される。そのため、保持部22に外力が加わったときに、被験体82(皮膚)に対する接触面44の接触圧力が変化することが抑制される。これにより、測定中に被験体82の血流量の変動が抑制される。
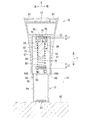
第2実施形態では、第1実施形態の血流測定装置10において、プローブ部11に代えて、プローブ部15(血流センサの一例)が用いられる。その他の構成は、第1実施形態と同様である。プローブ部15は、プローブ部11と同様に、本体部12に対して着脱可能である。
光センサ部71は、第1実施形態に係るセンサ部21と同様のセンサチップ83及びセンサ筐体84(筐体の一例)を有するものであるから、ここでは、詳細な説明が省略される。なお、光センサ部71には、圧力センサは設けられていない。
保持部72は、光センサ部71を上下方向7に移動可能に保持するものである。保持部72の外形は、概ね円錐台形状である。保持部72の内部は、光センサ部71の一部や、移動部材73、圧力センサ74、コイルバネ75,76が収容可能な空間である。
移動部材73は、円盤部94と、円盤部94から上方へ突出した第1突起95と、円盤部94から下方へ突出した第2突起96と、を有する。円盤部94は、外径がガイド筒88の内周面92の内径と同等の円盤形状である。円盤部94は、平らな上下面が上下方向7にそれぞれ向いた姿勢で、ガイド筒88の内部空間に収容されて、外周面が内周面92に摺動しつつ上下方向7に移動可能である。第1突起95は、円盤部94の中心から上方へ突出している。第1突起95が円盤部94から上方へ突出する長さは、ガイド筒88の上下方向7に沿った長さよりも短い。第2突起96は、円盤部94の中心から下方へ突出している。第2突起96が円盤部94から下方へ突出する長さは、ガイド筒88の上壁90から周縁部86までの上下方向7に沿った長さよりも短い。移動部材73の上下方向7に沿った長さは、ガイド筒88の上下方向7に沿った長さよりも長い。第2突起96は、光センサ部71のセンサ筐体84の上壁89の中心に形成された凹部80と当接可能である。
ガイド筒88の上壁90の下面には、圧力センサ74が設けられている。圧力センサ74は、例えばピエゾ素子などの感圧センサである。圧力センサ74は、下面が感圧面であり、下面に付与される力の大きさに応じた電気信号を出力する。圧力センサ74の下面には、移動部材73の第1突起95が当接し得る。
コイルバネ75(第1弾性体の一例)は、移動部材73の円盤部94と、ガイド筒88の上壁90をバネ座として、移動部材73と圧力センサ74との間に位置している。移動部材73は、コイルバネ75によって図8における下向き(第1向きの一例)へ付勢されている。コイルバネ75は、上下方向7へ弾性的に圧縮変形可能である。コイルバネ75の付勢力に抗して、移動部材73が図8における上向き(第2向きの一例)へ移動することにより、移動部材73の第1突起95が圧力センサ74に当接する(図9参照)。
プローブ部15を用いた測定処理は、制御部66(演算部の一例)により実行される。演算部66のメモリ(記憶部の一例)には、第1閾値及び第2閾値が予め記憶されている。第1閾値は、コイルバネ75が圧縮変形されて、移動部材73の第1突起95が圧力センサ74に当接したときに、圧力センサ74から出力されると予想される値である。第2閾値は、コイルバネ75,76が圧縮変形されて、移動部材73の第1突起95が圧力センサ74に当接し、且つ移動部材73の第2突起96が光センサ部71の凹部80に当接したときに、圧力センサ74から出力されると予想される値である。
第2実施形態に係るプローブ部15によれば、保持部72が直接又は間接にユーザに持たれた状態で、光センサ部71の接触面が被験体に接触すると、移動部材73が上向きへ移動して第1突起95が圧力センサ74と当接する。第1突起95の当接によって圧力センサ74から出力される信号を受信して、演算部66は、光センサ部71の出力に基づいて血流量を演算する。
前述の実施形態では、伝達部の一例としてコイルバネ23,75,76が用いられたが、保持部22,72に加わる外力をセンサ筐体27,84へ緩衝して伝達することが可能な部材であれば、コイルバネ23,75,76に代えて他の部材が用いられてもよい。例えば、コイルバネ23,75,76に代えて、スポンジ、ポーラス弾性体、ゲル弾性体などの弾性体や、内部に空気や液体を用いたダンパーや、電磁力などの斥力を用いたダンパーが用いられてもよい。
8・・・前後方向
9・・・左右方向
10・・・血流測定装置
11,15・・・プローブ部(血流センサ)
21・・・センサ部
22,72・・・保持部
23,75,76・・・コイルバネ(伝達部、弾性部材、バネ)
24・・・圧力センサ
26・・・センサチップ
27,84・・・センサ筐体(筐体)
31・・・レーザダイオード(レーザ素子)
32・・・フォトダイオード(受光素子)
44・・・接触面
62・・・表示部
66・・・制御部(演算部)
71・・・光センサ部
73・・・移動部材
81・・・押圧向き(接触面と交差する方向)
82・・・被験体
Claims (9)
- レーザ光を発生するレーザ素子、光を受光する受光素子、被験体に接触する接触面を有する筐体、を備えており、上記レーザ素子が発生したレーザ光を当該接触面を通じて被験体に照射し、当該被験体からの反射光を上記受光素子において受光し、受光量に関する信号を出力するセンサ部と、
上記筐体を、上記接触面と交差する方向へ移動可能に保持する保持部と、
上記保持部に加わる外力を上記センサ部へ緩衝して伝達する伝達部と、
上記被験体から上記接触面にかかる圧力を検出する圧力センサと、を更に具備し、
上記受光素子が出力する信号に基づいて血流量を演算する演算部と、
上記演算部による演算結果を表示する表示部と、
記憶部と、を具備し、
上記演算部は、
上記圧力センサによって検出された圧力を上記記憶部に記憶された所定のタイミングごとに取得し、
取得した上記圧力が上記所定範囲内であることに応じて、当該圧力を取得した上記タイミングに対応する上記演算を実行し、
取得した上記圧力が上記記憶部に予め記憶された所定範囲内にないことに応じて、当該圧力を取得した上記タイミングに対応する上記演算を実行せず、
上記演算を、上記記憶部に記憶された所定回数以上実行したか否かを判断し、上記所定回数以上上記演算を実行したと判断した場合に、当該所定回数以上の演算結果の平均値を算出し、当該平均値を上記演算結果として上記表示部に表示させる血流測定装置。 - 上記伝達部は、上記保持部と上記センサ部とを連結する弾性部材である請求項1に記載の血流測定装置。
- 上記弾性部材は、バネである請求項2に記載の血流測定装置。
- 上記演算部は、メモリを有しており、
上記演算部は、
取得した上記圧力が上記所定範囲内であることに応じて、上記演算の実行結果を上記メモリに記憶し、
取得した上記圧力が上記記憶部に予め記憶された所定範囲内にないことに応じて、上記メモリに上記演算の実行結果が記憶されている場合には、上記メモリに記憶済の上記演算結果を上記メモリから消去する請求項1から3のいずれかに記載の血流測定装置。 - 被験体に接触する接触面を有しており、当該接触面を通じて被験体からの反射光を受光して信号を出力する光センサ部と、
上記光センサ部を、上記接触面と交差する移動方向へ移動可能に保持する保持部と、
上記光センサ部を、上記移動方向のうち上記接触面が上記保持部から遠ざかる第1向きへ付勢する第1弾性体と、
上記第1弾性体によって上記第1向きへ付勢された移動部材と、
上記移動部材が上記第1弾性体の付勢力に抗して上記第1向きと反対の第2向きへ移動することによって、上記移動部材と当接し、当該当接を検知して信号を出力する圧力センサと、を具備する血流センサ。 - 上記光センサ部と上記移動部材との間に位置して、上記移動方向に対して弾性的に圧縮変形可能な第2弾性体を更に具備しており、
上記第1弾性体は、上記移動部材と上記圧力センサとの間に位置しており、
上記光センサ部は、上記第2弾性体の付勢力に抗して上記第2向きへ移動することによって上記移動部材と当接可能であり、
上記移動部材と上記圧力センサとが当接した状態における上記第1弾性体の第1付勢力は、上記光センサ部と上記移動部材とが当接した状態における上記第2弾性体の第2付勢力より小さい請求項5に記載の血流センサ。 - 上記第1弾性体と上記第2弾性体とが釣り合った均衡状態において、上記移動部材と上記圧力センサとの上記移動方向に沿った第1距離は、上記光センサ部と上記移動部材との上記移動方向に沿った第2距離より短い請求項6に記載の血流センサ。
- 上記光センサ部は、レーザ光を発生するレーザ素子と、光を受光する受光素子と、被験体に接触する接触面を有する筐体と、を備えており、上記レーザ素子が発生したレーザ光を当該接触面を通じて被験体に照射し、当該被験体からの反射光を上記受光素子において受光し、受光量に関する信号を出力するものである請求項5から7のいずれかに記載の血流センサ。
- 請求項6又は7に記載の血流センサと、
上記圧力センサの出力に応じて、上記光センサ部の出力に基づいて血流量を演算する演算部と、
第1閾値及び第2閾値を記憶する記憶部と、
警告を発信する警告部と、を具備しており、
上記演算部は、上記圧力センサの出力が第1閾値より大きいことを条件として、上記光センサ部の出力に基づいて血流量を演算し、上記圧力センサの出力が第2閾値より大きいことを条件として、上記警告部に警告を発信させる血流測定装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016041704 | 2016-03-04 | ||
| JP2016041704 | 2016-03-04 | ||
| PCT/JP2017/008499 WO2017150708A1 (ja) | 2016-03-04 | 2017-03-03 | 血流センサ及び血流測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017150708A1 JPWO2017150708A1 (ja) | 2018-12-27 |
| JP6881774B2 true JP6881774B2 (ja) | 2021-06-02 |
Family
ID=59743000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018503420A Active JP6881774B2 (ja) | 2016-03-04 | 2017-03-03 | 血流センサ及び血流測定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11202581B2 (ja) |
| EP (2) | EP3698706B1 (ja) |
| JP (1) | JP6881774B2 (ja) |
| CN (1) | CN109069042B (ja) |
| WO (1) | WO2017150708A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2592508B (en) * | 2018-09-12 | 2022-08-31 | Smith & Nephew | Device, apparatus and method of determining skin perfusion pressure |
| CN111248863B (zh) * | 2020-01-19 | 2023-01-31 | 国家康复辅具研究中心 | 一种诱发人体皮肤充血响应的加压装置 |
| GB202003586D0 (en) * | 2020-03-12 | 2020-04-29 | Smith & Nephew | Device, apparatus and method of determining skin perfusion pressure |
| WO2023181824A1 (ja) * | 2022-03-22 | 2023-09-28 | テルモ株式会社 | 心音取得装置、心音取得システム、心音取得方法、及びプログラム |
| WO2023238853A1 (ja) * | 2022-06-07 | 2023-12-14 | マルホ株式会社 | 肌性状測定装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5323182A (en) * | 1976-08-14 | 1978-03-03 | Michishi Tani | Device for diagnosing pulsation |
| JPS5459786U (ja) * | 1977-10-04 | 1979-04-25 | ||
| GB2132483B (en) * | 1982-04-07 | 1986-02-12 | Univ Manchester | A device for measuring blood flow |
| JPS6397146A (ja) * | 1986-10-14 | 1988-04-27 | キヤノン株式会社 | 血流計測用プロ−ブ |
| JP3243970B2 (ja) * | 1995-05-12 | 2002-01-07 | セイコーエプソン株式会社 | 健康状態解析装置 |
| JP3672393B2 (ja) | 1996-10-21 | 2005-07-20 | オメガウェーブ株式会社 | レーザー血流計の光ファイバープローブ |
| JP2007244600A (ja) | 2006-03-15 | 2007-09-27 | Fujitsu Ltd | 脈波検出方法及び装置 |
| WO2008114401A1 (ja) * | 2007-03-20 | 2008-09-25 | Pioneer Corporation | 生体情報計測装置 |
| JP4948326B2 (ja) * | 2007-08-21 | 2012-06-06 | 株式会社日立製作所 | 生体光計測用頭部装着式ホルダ |
| WO2015085240A1 (en) * | 2013-12-05 | 2015-06-11 | Veriskin Llc | Skin perfusion monitoring device |
-
2017
- 2017-03-03 WO PCT/JP2017/008499 patent/WO2017150708A1/ja active Application Filing
- 2017-03-03 CN CN201780014900.3A patent/CN109069042B/zh active Active
- 2017-03-03 EP EP20169625.9A patent/EP3698706B1/en active Active
- 2017-03-03 US US16/080,052 patent/US11202581B2/en active Active
- 2017-03-03 JP JP2018503420A patent/JP6881774B2/ja active Active
- 2017-03-03 EP EP17760170.5A patent/EP3424417B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3424417B1 (en) | 2022-08-17 |
| EP3424417A1 (en) | 2019-01-09 |
| EP3698706A1 (en) | 2020-08-26 |
| JPWO2017150708A1 (ja) | 2018-12-27 |
| EP3698706B1 (en) | 2021-09-08 |
| CN109069042A (zh) | 2018-12-21 |
| US20190014995A1 (en) | 2019-01-17 |
| EP3424417A4 (en) | 2019-10-30 |
| WO2017150708A1 (ja) | 2017-09-08 |
| US11202581B2 (en) | 2021-12-21 |
| CN109069042B (zh) | 2021-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6881774B2 (ja) | 血流センサ及び血流測定装置 | |
| JP4485234B2 (ja) | 生体情報計測装置 | |
| JP4476664B2 (ja) | 生体情報計測装置 | |
| JP4515148B2 (ja) | 生体情報計測装置及び生体情報計測方法 | |
| JP2004351107A (ja) | 携帯式医療用測定装置 | |
| US20130281868A1 (en) | Blood pressure measurement device | |
| JP2015173935A (ja) | 生体計測装置および生体計測方法 | |
| JP2013007744A5 (ja) | ||
| JP2007167183A (ja) | 光電脈波測定装置、指先装着用プローブ及び光電脈波測定方法 | |
| US11344209B2 (en) | Electronic device and method of estimating bio-information using the same | |
| JPWO2014024653A1 (ja) | 生体情報測定装置、およびパルスオキシメータ | |
| JPWO2015136956A1 (ja) | 測定装置および測定方法 | |
| JP2017153616A (ja) | パルスオキシメータプローブ | |
| WO2015046429A1 (ja) | 脈波検出装置 | |
| JP2019201946A (ja) | 睡眠状態測定装置 | |
| CN109982632B (zh) | 便携式测量仪器 | |
| EP4249875A2 (en) | Apparatus and method for estimating optical-based force | |
| US20170086739A1 (en) | Measuring apparatus and measuring system | |
| US10238297B2 (en) | Object information acquiring apparatus | |
| JP2015192742A (ja) | 脈波検出装置 | |
| JP2013220312A (ja) | パルスオキシメータ | |
| JP2017093808A (ja) | 携帯型生体情報測定装置 | |
| JP6437893B2 (ja) | 脈波計 | |
| WO2005092181A1 (ja) | 生体情報計測装置 | |
| JP7058376B1 (ja) | 測定装置、および推定システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200828 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210304 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20210304 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20210316 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20210323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6881774 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |