JP6867218B2 - 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 - Google Patents
体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 Download PDFInfo
- Publication number
- JP6867218B2 JP6867218B2 JP2017083389A JP2017083389A JP6867218B2 JP 6867218 B2 JP6867218 B2 JP 6867218B2 JP 2017083389 A JP2017083389 A JP 2017083389A JP 2017083389 A JP2017083389 A JP 2017083389A JP 6867218 B2 JP6867218 B2 JP 6867218B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- patient
- ultrasonic image
- tissue
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 58
- 238000001959 radiotherapy Methods 0.000 title claims description 19
- 230000000241 respiratory effect Effects 0.000 claims description 58
- 238000004364 calculation method Methods 0.000 claims description 28
- 230000005855 radiation Effects 0.000 claims description 28
- 238000004088 simulation Methods 0.000 claims description 25
- 238000005259 measurement Methods 0.000 claims description 15
- 230000029058 respiratory gaseous exchange Effects 0.000 claims description 12
- 230000001360 synchronised effect Effects 0.000 claims description 7
- 238000012545 processing Methods 0.000 claims description 5
- 239000000470 constituent Substances 0.000 claims description 3
- 238000000691 measurement method Methods 0.000 claims description 3
- 239000000284 extract Substances 0.000 claims description 2
- 210000001519 tissue Anatomy 0.000 description 164
- 238000011282 treatment Methods 0.000 description 36
- 239000000523 sample Substances 0.000 description 32
- 206010028980 Neoplasm Diseases 0.000 description 29
- 238000010586 diagram Methods 0.000 description 15
- 238000002604 ultrasonography Methods 0.000 description 15
- 210000000056 organ Anatomy 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 12
- 238000002591 computed tomography Methods 0.000 description 10
- 238000004458 analytical method Methods 0.000 description 4
- 210000000988 bone and bone Anatomy 0.000 description 4
- 210000003205 muscle Anatomy 0.000 description 4
- 210000004204 blood vessel Anatomy 0.000 description 3
- 201000011510 cancer Diseases 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000001225 therapeutic effect Effects 0.000 description 3
- FPIPGXGPPPQFEQ-OVSJKPMPSA-N all-trans-retinol Chemical compound OC\C=C(/C)\C=C\C=C(/C)\C=C\C1=C(C)CCCC1(C)C FPIPGXGPPPQFEQ-OVSJKPMPSA-N 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 210000001835 viscera Anatomy 0.000 description 2
- 206010006322 Breath holding Diseases 0.000 description 1
- 241001669679 Eleotris Species 0.000 description 1
- 235000019169 all-trans-retinol Nutrition 0.000 description 1
- 239000011717 all-trans-retinol Substances 0.000 description 1
- 238000010009 beating Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 238000002512 chemotherapy Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 238000002513 implantation Methods 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Radiation-Therapy Devices (AREA)
Description
本発明の体内組織位置測定装置および体内組織位置測定方法の第1の実施例を、図1乃至図8を用いて説明する。なお、図1乃至図8で共通する部分については同一の符号を付している。
本発明の第2の実施例の放射線治療装置を図9を用いて説明する。図9は本発明の第2の実施例である放射線照射装置の構成概念を示す図である。第1の実施例と同じ構成には同一の符号を示し、説明は省略する。以下の実施例においても同様とする。
本発明の第3の実施例の体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法を図10を用いて説明する。図10は、本実施例の体内組織位置測定装置における超音波断面画像の概念図である。
なお、本発明は、上記の実施例に限定されるものではなく、様々な変形例が含まれる。上記の実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることも可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
101…呼吸同期3D情報取得部
102…患者3D情報保存部
103…超音波伝搬モデル作成部
104…体内組織位置変更部
105…超音波画像シミュレーション部
106…データベース
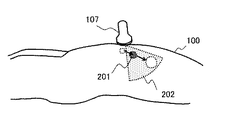
107…超音波探触子
108…超音波送受信部
109…超音波画像構成部
110…呼吸状態計測部
111…体内組織位置算出部
112…体内組織位置出力部
201…腫瘍
202…超音波走査断面
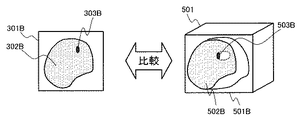
301A,301B…ある呼吸位相での実超音波画像
302A,302B…実超音波画像中に描画された臓器
303A,303B…実超音波画像中に描画された腫瘍
401,401A…超音波伝搬モデル
501…患者3D情報
501A,501B…ある呼吸位相での疑似超音波画像
502A,502B…患者3D情報中に描画された臓器
503A,503B…患者3D情報中に描画された測定対象の腫瘍
901…放射線照射部
902…放射線制御部
903…放射線
1001…超音波反射体
Claims (11)
- 超音波によって患者体内の組織の位置を測定する体内組織位置測定装置であって、
呼吸と同期した患者の3D情報を取得する呼吸同期3D情報取得部と、
前記呼吸同期3D情報取得部によって取得した前記3D情報を保存する患者3D情報保存部と、
前記患者3D情報保存部に保存された前記患者3D情報を用いて超音波伝搬モデルを作成する超音波伝搬モデル作成部と、
前記超音波伝搬モデル作成部において作成された前記超音波伝搬モデル内での超音波の伝搬をシミュレーションして疑似超音波画像を計算する超音波画像シミュレーション部と、
前記超音波画像シミュレーション部で計算された前記疑似超音波画像を前記患者3D情報と対応づけて保存するデータベースと、
前記患者の体内に向けて超音波を送信し、前記患者の体内から戻る超音波を受信する超音波送受信部と、
前記超音波送受信部で受信した超音波から実超音波画像を構成する超音波画像構成部と、
前記患者の呼吸状態を測定する呼吸状態計測部と、
前記呼吸状態計測部で測定した呼吸状態に基づいて、前記超音波画像構成部で構成された前記実超音波画像と前記データベースに記憶された疑似超音波画像とを比較して、前記患者の体内の組織位置を算出する体内組織位置算出部と、を備えた
ことを特徴とする体内組織位置測定装置。 - 請求項1に記載の体内組織位置測定装置において、
前記超音波伝搬モデル作成部で作成した前記超音波伝搬モデル内の体内組織の位置を変え、変えた超音波伝搬モデルに基づいてシミュレーションさせるための入力デバイスを更に備えた
ことを特徴とする体内組織位置測定装置。 - 請求項1に記載の体内組織位置測定装置において、
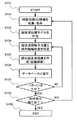
前記体内組織位置算出部は、前記実超音波画像と前記疑似超音波画像のそれぞれの画像内における体内組織の形状、サイズ、および位置を画像処理により抽出し、前記形状、サイズ、位置の差異を誤差として計算して、計算した前記誤差を予め設定された閾値と比較することで、前記患者の体内の組織位置を算出する
ことを特徴とする体内組織位置測定装置。 - 請求項1に記載の体内組織位置測定装置において、
前記体内組織位置算出部は、前記実超音波画像と疑似超音波画像との相関係数を計算し、計算した前記相関係数と予め設定された閾値とを比較することで前記患者の体内の組織位置を算出する
ことを特徴とする体内組織位置測定装置。 - 請求項1に記載の体内組織位置測定装置において、
前記体内組織位置算出部は、前記実超音波画像と疑似超音波画像との解像度を、いずれか一方の画素データを内挿することにより一致させる
ことを特徴とする体内組織位置測定装置。 - 請求項1に記載の体内組織位置測定装置において、
前記患者の体内に埋め込む超音波反射体を更に備え、
前記体内組織位置算出部は、前記疑似超音波画像および前記実超音波画像に映る前記超音波反射体を用いて前記患者の体内の組織位置を算出する
ことを特徴とする体内組織位置測定装置。 - 対象とする体内組織位置を特定して、標的に対して放射線を照射する放射線治療装置であって、
請求項1に記載の体内組織位置測定装置と、
前記放射線を前記標的に対して照射する照射装置と、
前記体内組織位置測定装置を用いて測定した体内組織位置に基づいて前記照射装置における放射線照射位置を制御する放射線制御部と、を備えた
ことを特徴とする放射線治療装置。 - 超音波によって患者体内の体内組織位置を求める体内組織位置測定方法であって、
呼吸と同期した患者の3D情報を取得するステップと、
取得した前記3D情報を用いて超音波伝搬モデルを作成するステップと、
作成した前記超音波伝搬モデル内での超音波の伝搬をシミュレーションして疑似超音波画像を作成するステップと、
作成した前記疑似超音波画像を前記患者3D情報と対応付けてデータベースに保存するステップと、
前記患者の体内に向けて超音波を送信するとともに前記患者の体内から戻る超音波を受信し、受信した超音波から実超音波画像を構成するステップと、
前記患者の呼吸状態を測定するステップと、
測定した前記患者の呼吸状態に基づいて、前記実超音波画像と前記疑似超音波画像とを比較して、前記患者の体内の組織位置を算出するステップと、を有する
ことを特徴とする体内組織位置測定方法。 - 請求項8に記載の体内組織位置測定方法において、
前記体内組織位置を算出するステップは、
画像処理により、前記実超音波画像と前記疑似超音波画像のそれぞれの画像内における体内組織の形状、サイズ、および位置を画像処理により抽出するステップと、
前記形状、サイズ、および位置の差異を誤差として計算するステップと、
前記誤差を予め設定された閾値と比較することで前記実超音波画像と前記疑似超音波画像とが一致するか否かを判定するステップと、を有する
ことを特徴とする体内組織位置測定方法。 - 請求項8に記載の体内組織位置測定方法において、
前記体内組織位置を算出するステップは、
前記実超音波画像と疑似超音波画像との相関係数を計算するステップと、
前記相関係数を予め設定された閾値と比較することで前記実超音波画像と前記疑似超音波画像とが一致するか否かを判定するステップと、を有する
ことを特徴とする体内組織位置測定方法。 - 請求項8に記載の体内組織位置測定方法において、
前記体内組織位置を算出するステップは、
前記実超音波画像と疑似超音波画像との解像度を、いずれか一方の画素データを内挿することにより一致させるステップ、を更に有する
ことを特徴とする体内組織位置測定方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017083389A JP6867218B2 (ja) | 2017-04-20 | 2017-04-20 | 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 |
| PCT/JP2018/008404 WO2018193731A1 (ja) | 2017-04-20 | 2018-03-05 | 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017083389A JP6867218B2 (ja) | 2017-04-20 | 2017-04-20 | 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018175688A JP2018175688A (ja) | 2018-11-15 |
| JP2018175688A5 JP2018175688A5 (ja) | 2020-04-09 |
| JP6867218B2 true JP6867218B2 (ja) | 2021-04-28 |
Family
ID=63857106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017083389A Active JP6867218B2 (ja) | 2017-04-20 | 2017-04-20 | 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6867218B2 (ja) |
| WO (1) | WO2018193731A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200132144A (ko) * | 2019-05-15 | 2020-11-25 | 삼성메디슨 주식회사 | 초음파 영상 장치 및 그 표시 방법 |
| JP7433927B2 (ja) * | 2020-01-22 | 2024-02-20 | キヤノンメディカルシステムズ株式会社 | 放射線治療計画装置 |
| US11497475B2 (en) | 2020-01-31 | 2022-11-15 | Caption Health, Inc. | Ultrasound image acquisition optimization according to different respiration modes |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003117010A (ja) * | 2001-08-09 | 2003-04-22 | Mitsubishi Electric Corp | 放射線治療装置、並びにプログラム及び該プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2004000499A (ja) * | 2002-03-27 | 2004-01-08 | Aloka Co Ltd | 超音波医療システム |
| US7177386B2 (en) * | 2004-03-15 | 2007-02-13 | Varian Medical Systems Technologies, Inc. | Breathing synchronized computed tomography image acquisition |
| CN103648398B (zh) * | 2012-06-05 | 2016-05-04 | 株式会社东芝 | 超声波诊断装置及图像处理装置 |
-
2017
- 2017-04-20 JP JP2017083389A patent/JP6867218B2/ja active Active
-
2018
- 2018-03-05 WO PCT/JP2018/008404 patent/WO2018193731A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018193731A1 (ja) | 2018-10-25 |
| JP2018175688A (ja) | 2018-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6987040B2 (ja) | 運動関係を決定する方法及び装置 | |
| CN104244818B (zh) | 在非侵入式治疗期间的基于参考的运动跟踪 | |
| US20180228471A1 (en) | Method and apparatus for analyzing elastography of tissue using ultrasound waves | |
| WO2011021410A1 (ja) | 放射線治療システム | |
| JP2006515187A5 (ja) | ||
| US10500418B2 (en) | System and method for patient-specific motion management for treatment | |
| JP2006515187A (ja) | 埋め込みフィデューシャルを用いることなく内部標的部位を追跡するための装置及び方法 | |
| KR20140126815A (ko) | 호흡 주기 동안 체내 장기의 변화를 추적하는 방법, 장치 및 시스템. | |
| CN106456253B (zh) | 免于重建的自动多模态超声配准 | |
| US20140018676A1 (en) | Method of generating temperature map showing temperature change at predetermined part of organ by irradiating ultrasound wave on moving organs, and ultrasound system using the same | |
| JP6867218B2 (ja) | 体内組織位置測定装置および放射線治療装置、ならびに体内組織位置測定方法 | |
| US20130346050A1 (en) | Method and apparatus for determining focus of high-intensity focused ultrasound | |
| KR20130054003A (ko) | 해부학적 특성을 기반으로 초음파 조사 계획을 수립하는 방법 및 장치 | |
| JP5495886B2 (ja) | 患者位置決めシステム | |
| JP2012045198A (ja) | 治療支援装置及び治療支援システム | |
| KR20140100648A (ko) | 일 호흡 주기에 따른 장기의 형상 및 위치의 변화를 나타내는 모델을 생성하는 방법, 장치 및 시스템. | |
| JP7072471B2 (ja) | 位置測定装置、およびこれを備えた治療システム、ならびに位置測定方法 | |
| CN116437866A (zh) | 用于基于计算的机器人臂位置生成图像的方法、装置和系统 | |
| JP5177943B2 (ja) | 治療システム | |
| KR101717728B1 (ko) | 환자 맞춤형 구동 팬텀 제작 시스템, 방법 및 프로그램 | |
| JP6450165B2 (ja) | 荷電粒子ビーム装置および荷電粒子ビーム照射位置特定装置ならびに荷電粒子ビーム照射位置特定方法 | |
| KR20140021109A (ko) | 초음파를 이용하여 움직이는 장기 내부에 위치한 병변의 이동 궤적을 추적하는 방법 및 시스템 | |
| JP6925137B2 (ja) | 体内組織位置測定装置 | |
| KR20190082161A (ko) | 피부 특성에 따라 에너지를 조사하는 시술장치 | |
| Owen et al. | The detectability and localization accuracy of implanted fiducial markers determined on in-room computerized tomography (CT) and electronic portal images (EPI) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6867218 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |