JP6847235B2 - 搬送装置及び該搬送装置の運転方法 - Google Patents
搬送装置及び該搬送装置の運転方法 Download PDFInfo
- Publication number
- JP6847235B2 JP6847235B2 JP2019538214A JP2019538214A JP6847235B2 JP 6847235 B2 JP6847235 B2 JP 6847235B2 JP 2019538214 A JP2019538214 A JP 2019538214A JP 2019538214 A JP2019538214 A JP 2019538214A JP 6847235 B2 JP6847235 B2 JP 6847235B2
- Authority
- JP
- Japan
- Prior art keywords
- transport device
- chassis
- guide sleeve
- wheels
- extension
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 11
- 230000032258 transport Effects 0.000 claims description 60
- 239000000758 substrate Substances 0.000 claims description 8
- 230000008901 benefit Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 239000000969 carrier Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G7/00—Beds specially adapted for nursing; Devices for lifting patients or disabled persons
- A61G7/08—Apparatus for transporting beds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07513—Details concerning the chassis
- B66F9/07522—Variable length or width chassis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07572—Propulsion arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
- A61G2203/22—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering for automatically guiding movable devices, e.g. stretchers or wheelchairs in a hospital
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/30—General characteristics of devices characterised by sensor means
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Geology (AREA)
- Nursing (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Invalid Beds And Related Equipment (AREA)
- Handcart (AREA)
- Body Structure For Vehicles (AREA)
Description
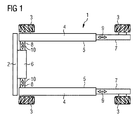
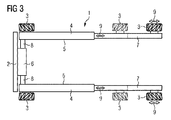
2 基体
3 全方向車輪
4 プロング
5 第1直線案内スリーブ
6 第2直線案内スリーブ
7 第1延長部
8 第2延長部
9 長手延長方向
10 横延長方向
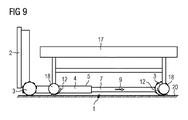
11 持ち上げ装置
12 ブレード(羽根状手段)
13 ローラ
14 折り畳み方向
15 昇降桁
16 桁ムーバ
17 ベッド
18 ベッド17の車輪
19 コンテナ
20 床
Claims (8)
- 物体(17,19)をある位置から別の位置へ搬送する搬送装置であって、
少なくとも2つのプロング(4)をもつ二股フォーク形状のシャーシ(1)を備え、
該シャーシ(1)に、当該搬送装置を移動させるための少なくとも4つのモータ駆動全方向車輪(3)が設けられ、
前記各プロング(4)は、第1の案内スリーブ(5)と、該第1の案内スリーブ(5)に引っ込みまた該第1の案内スリーブ(5)から突き出ることが可能で且つ所定の長手方向位置でロックすることの可能な第1の延長部(7)とを含み、少なくとも前記第1の延長部(7)のそれぞれに前記モータ駆動全方向車輪(3)が1つずつ設けられ、
前記第1の延長部(7)が、少なくとも1つの前記モータ駆動全方向車輪(3)の作動によって前記第1の案内スリーブ(5)に対し移動することにより、前記シャーシ(1)のホイールベースを変更できるように構成されている、搬送装置。 - 前記シャーシ(1)は、前記プロング(4)の間に、前記プロング(4)に対し直交配置された第2の案内スリーブ(6)と、該第2の案内スリーブ(6)に引っ込みまた該第2の案内スリーブ(6)から突き出ることが可能な第2の延長部(8)とを更に備え、
前記第2の延長部(8)が、少なくとも1つの前記モータ駆動全方向車輪(3)の作動によって前記第2の案内スリーブ(6)に対し移動することにより、前記シャーシ(1)のトレッドを変更できるように構成されている、請求項1に記載の搬送装置。 - 前記各プロング(4)に、搬送のために物体(17,19)を持ち上げるように構成された持ち上げ装置(11)が少なくとも1つ配置され、
該持ち上げ装置(11)は、前記物体(17,19)の車輪(18)の下に滑り込むことを可能にする、ローラ(13)とブレード(12)とから構成される、請求項1又は2に記載の搬送装置。 - 前記プロング(4)の端部を接続した、垂直配置の基体(2)を備え、
該プロング(4)の接続端部が前記基体(2)に沿って垂直方向上方へ移動することにより、前記シャーシ(1)が、収納スペースを節約するために折り畳み可能である、請求項1〜3のいずれか1項に記載の搬送装置。 - 搬送する物体(17,19)がベッド(17)である、請求項1〜4のいずれか1項に記載の搬送装置。
- 周囲と相互作用するように構成されたセンサと、
該センサに接続され、当該搬送装置を自律的且つ自動的に動作させるように構成された制御ユニットとを備える、請求項1〜5のいずれか1項に記載の搬送装置。 - 請求項3又は請求項3を引用する請求項4〜6のいずれか1項に記載の搬送装置の自動運転方法であって、
前記搬送装置を物体(17,19)まで駆動し、
前記持ち上げ装置(11)を該物体(17,19)の車輪(18)に滑り込ませて該物体(17,19)を持ち上げ、
該持ち上げた物体(17,19)を目的地へ搬送することを含む、自動運転方法。 - 前記プロング(4)の長さと横方向間隔を前記モータ駆動全方向車輪(3)の作動により調節して、前記シャーシ(1)のホイールベースとトレッドを前記物体(17,19)のサイズに適合させることを含む、請求項7に記載の自動運転方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17151426.8 | 2017-01-13 | ||
| EP17151426 | 2017-01-13 | ||
| PCT/EP2017/071950 WO2018130315A1 (en) | 2017-01-13 | 2017-09-01 | Transport device and method of operating such transport device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020516510A JP2020516510A (ja) | 2020-06-11 |
| JP6847235B2 true JP6847235B2 (ja) | 2021-03-24 |
Family
ID=57799602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019538214A Active JP6847235B2 (ja) | 2017-01-13 | 2017-09-01 | 搬送装置及び該搬送装置の運転方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11426317B2 (ja) |
| EP (1) | EP3534860B1 (ja) |
| JP (1) | JP6847235B2 (ja) |
| KR (1) | KR102424207B1 (ja) |
| CN (1) | CN110177533B (ja) |
| WO (1) | WO2018130315A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6793338B2 (ja) * | 2017-02-03 | 2020-12-02 | パナソニックIpマネジメント株式会社 | 移動装置、搬送システム及び移動方法 |
| DE102019101857B4 (de) * | 2019-01-25 | 2021-03-04 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Fahrzeug zum Anheben, Transportieren und Absenken von Ladungsträgern |
| FR3093916B1 (fr) * | 2019-03-18 | 2021-05-07 | Ifp Energies Now | Dispositif d’aide à la conduite de roue de système de propulsion électrique amovible pour un objet roulant |
| DE102019203882B3 (de) | 2019-03-21 | 2020-07-02 | Siemens Healthcare Gmbh | Patientenlagerungseinrichtung und medizinische Bildgebungseinrichtung |
| CN110817217B (zh) * | 2019-10-28 | 2021-07-30 | 哈尔滨工大智慧工厂有限公司 | 一种机身宽度可调节的巷道堆垛机及其控制方法 |
| CN111039060A (zh) * | 2019-11-28 | 2020-04-21 | 武汉纺织大学 | 一种幅宽可调的落布机器人小车 |
| CN110949567A (zh) * | 2019-12-24 | 2020-04-03 | 广东博智林机器人有限公司 | Agv底盘 |
| EP3851050A1 (de) | 2020-01-16 | 2021-07-21 | Siemens Healthcare GmbH | Mobile platform |
| DK181295B1 (da) * | 2020-01-31 | 2023-07-06 | Roeq Aps | Transmissionsmekanisme til indbygning i top moduler til mobile robotter |
| EP3865355A1 (en) * | 2020-02-14 | 2021-08-18 | Wheel.me AS | Transportation arrangement for transportation of an object on a surface |
| JP2021167155A (ja) * | 2020-04-13 | 2021-10-21 | ソニーグループ株式会社 | 移動体および荷物の運搬方法 |
| CN111392314A (zh) * | 2020-04-30 | 2020-07-10 | 上海机器人产业技术研究院有限公司 | 一种适应不同直径线卷的变距搬运机构及方法 |
| US11690582B2 (en) | 2020-05-06 | 2023-07-04 | GE Precision Healthcare LLC | Systems and methods for a mobile medical device drive platform |
| DE102020210968B4 (de) | 2020-08-31 | 2022-07-28 | Siemens Healthcare Gmbh | System und Verfahren zum Bewegen einer Gantry eines medizinischen Bildgebungsgeräts |
| DE102021202983A1 (de) | 2021-03-26 | 2022-04-21 | Siemens Healthcare Gmbh | Medizinische Bildgebungseinrichtung und Bildgebungsinfrastruktur mit mehreren Räumen |
| CN113184053B (zh) * | 2021-05-25 | 2022-07-01 | 吉林大学 | 一种横纵向间距可调式线控底盘及其控制方法 |
| CN113730157A (zh) * | 2021-09-26 | 2021-12-03 | 郑州大学第一附属医院 | 一种ercp辅助机械手装置 |
| WO2023083673A1 (de) | 2021-11-11 | 2023-05-19 | Inventio Ag | Verfahren zum betreiben eines transportroboters, transportroboter, desinfektionseinrichtung sowie transportsystem |
| CN114348143B (zh) * | 2021-12-08 | 2023-05-30 | 南方科技大学 | 基于麦克纳姆轮的全向移动机器人 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE31178E (en) * | 1973-10-15 | 1983-03-15 | Ricon Corporation | Wheelchair lift |
| US4466771A (en) * | 1981-05-29 | 1984-08-21 | Thorley Graham R | Wheelchair lift |
| US4273217A (en) * | 1979-06-13 | 1981-06-16 | Marubeni Kogyo K.K. | Wheelchair lift |
| US4953665A (en) * | 1988-01-11 | 1990-09-04 | Ricon Corporation | Wayside lift |
| US5180275A (en) * | 1991-05-28 | 1993-01-19 | The Braun Corporation | Rotary bus lift with power stowable platform |
| US5697109A (en) * | 1994-10-28 | 1997-12-16 | Barton Medical Corporation | Patient transport system |
| US6019565A (en) * | 1996-11-12 | 2000-02-01 | Gesuale; Thomas | Container lifting and transport apparatus |
| AUPP085997A0 (en) * | 1997-12-12 | 1998-01-08 | Carter, William Shane | Mobile car body hoist |
| CA2408087A1 (en) | 2000-05-11 | 2001-11-15 | Hill-Rom Services, Inc. | Motorized propulsion system for a bed |
| US7926618B2 (en) * | 2004-12-30 | 2011-04-19 | Agm Container Controls, Inc. | Portable wheel chair lift |
| US7395900B2 (en) * | 2005-01-28 | 2008-07-08 | Richard Murray | Portable wheelchair lift |
| US7445416B2 (en) * | 2006-02-03 | 2008-11-04 | Ricon Corp. | Wheelchair lift with slidable support arm |
| DE102006033872A1 (de) | 2006-07-21 | 2008-01-24 | Patent-Treuhand-Gesellschaft für elektrische Glühlampen mbH | Dielektrisch behinderte Entladungslampe mit Glaswand |
| US7938756B2 (en) | 2007-02-10 | 2011-05-10 | Roy Rodetsky | Powered mobile lifting, gait training and omnidirectional rolling apparatus and method |
| JPWO2008129847A1 (ja) * | 2007-04-12 | 2010-07-22 | パナソニック株式会社 | 移乗支援装置 |
| EP2039336A3 (en) * | 2007-09-06 | 2009-06-03 | Holdingselskabet MKR Finans ApS | Transport system including a drive unit |
| CN201597499U (zh) * | 2009-12-03 | 2010-10-06 | 天津工业大学 | 40英尺高柜集装箱内装运轿车的车架 |
| DE102010008014A1 (de) * | 2010-02-15 | 2011-08-18 | Siemens Aktiengesellschaft, 80333 | Führungssystem für medizinische Anlagen, medizinische Anlage, fahrbare Transportvorrichtung sowie Verfahren |
| US8165718B2 (en) * | 2010-07-30 | 2012-04-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic transportation devices and systems |
| US8375484B2 (en) * | 2010-07-30 | 2013-02-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Physical assistive robotic devices and systems |
| US9259369B2 (en) * | 2012-09-18 | 2016-02-16 | Stryker Corporation | Powered patient support apparatus |
| US20140094997A1 (en) * | 2012-09-28 | 2014-04-03 | Elwha Llc | Automated Systems, Devices, and Methods for Transporting and Supporting Patients Including Multi-Floor Operation |
| DE102012110755A1 (de) * | 2012-11-09 | 2014-05-15 | MAQUET GmbH | Transportwagen zum Transport einer Patientenlagerfläche und/oder einer Operationstischsäule eines Operationstischs |
| DE102014202033B4 (de) * | 2014-02-05 | 2017-07-06 | Siemens Healthcare Gmbh | Mobiles medizinisches Gerät sowie Verfahren zur Steuerung einer Bewegung des mobilen medizinischen Geräts |
| US20160368747A1 (en) * | 2014-09-02 | 2016-12-22 | Brian O'Connell | Pallet transporting device |
| JP6522743B2 (ja) | 2014-09-18 | 2019-05-29 | アイディーイーアソシエーツ・(アイオーエム)・リミテッド | 車輪付き運搬装置 |
| DE102014115901A1 (de) * | 2014-10-31 | 2016-05-04 | MAQUET GmbH | Operationstisch und Bodenplattform für einen Operationstisch |
| US9878448B2 (en) * | 2015-11-02 | 2018-01-30 | Daegu Gyeongbuk Institute Of Science And Technology | Omnidirectional moving robot device, and system and method for object conveyance using the same |
| CN205417314U (zh) * | 2015-12-10 | 2016-08-03 | 天津勇达行汽车配件研发有限公司 | 一种摩托车轮胎固定架 |
| US10238564B2 (en) * | 2015-12-27 | 2019-03-26 | Mohammad Fakhrizadeh | Portable assistive lift |
| US10406047B1 (en) * | 2016-12-12 | 2019-09-10 | Jeffrey Runnels | Apparatus and method for mobility device lifting and positioning |
-
2017
- 2017-09-01 WO PCT/EP2017/071950 patent/WO2018130315A1/en unknown
- 2017-09-01 KR KR1020197023305A patent/KR102424207B1/ko active IP Right Grant
- 2017-09-01 US US16/475,419 patent/US11426317B2/en active Active
- 2017-09-01 EP EP17765119.7A patent/EP3534860B1/en active Active
- 2017-09-01 JP JP2019538214A patent/JP6847235B2/ja active Active
- 2017-09-01 CN CN201780083216.0A patent/CN110177533B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20190103338A (ko) | 2019-09-04 |
| WO2018130315A1 (en) | 2018-07-19 |
| JP2020516510A (ja) | 2020-06-11 |
| CN110177533A (zh) | 2019-08-27 |
| US11426317B2 (en) | 2022-08-30 |
| EP3534860A1 (en) | 2019-09-11 |
| EP3534860B1 (en) | 2022-12-07 |
| KR102424207B1 (ko) | 2022-07-25 |
| US20190343701A1 (en) | 2019-11-14 |
| CN110177533B (zh) | 2022-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6847235B2 (ja) | 搬送装置及び該搬送装置の運転方法 | |
| US10406043B2 (en) | Transport apparatus | |
| JP6522743B2 (ja) | 車輪付き運搬装置 | |
| JP6045697B2 (ja) | 動力式簡易寝台のための自動システム | |
| US11420338B2 (en) | Assistive robot systems for container tilting | |
| JP5770745B2 (ja) | 動力付きロールイン型簡易ベッド | |
| US20200009718A1 (en) | Robotic bin management system and method | |
| US20190232992A1 (en) | Hitch-mounted robot systems | |
| US20030079923A1 (en) | Hospital bed power-assist | |
| US11642999B2 (en) | Delivery vehicle with unloading arm | |
| US20100180380A1 (en) | Drive system for patient support | |
| US9248065B1 (en) | Patient transport apparatus for transport between a patient bed and a bathtub | |
| NL1039295A (nl) | Voertuig, in het bijzonder verplaatser. | |
| KR101872282B1 (ko) | 카트 로봇 | |
| CN114379915A (zh) | 输送系统、输送方法以及计算机可读取的存储介质 | |
| EP2233380A1 (en) | A transport system | |
| ES2924911T3 (es) | Dispositivo de transporte de objetos que comprende de una lanzadera autoguiada | |
| JP3757460B2 (ja) | 無人搬送車用ワゴン | |
| US20230277397A1 (en) | Patient support apparatus having motorized wheels | |
| KR20240080297A (ko) | 휠 플랫폼 자율주행을 위한 메카놈휠 기반 견인 로봇 및 주행 제어 방법 | |
| EP3846658B1 (en) | Motorized carry-on provided with a retractable platform comprising a pair of driving wheels | |
| WO2014204315A1 (en) | Auxiliary trolley and a method using the auxiliary trolley for collecting shop articles | |
| TWM363420U (en) | Multi-functional transport car structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190826 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210302 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6847235 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |