JP6835536B2 - 画像処理方法、表示装置および点検システム - Google Patents
画像処理方法、表示装置および点検システム Download PDFInfo
- Publication number
- JP6835536B2 JP6835536B2 JP2016217782A JP2016217782A JP6835536B2 JP 6835536 B2 JP6835536 B2 JP 6835536B2 JP 2016217782 A JP2016217782 A JP 2016217782A JP 2016217782 A JP2016217782 A JP 2016217782A JP 6835536 B2 JP6835536 B2 JP 6835536B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- dimensional
- unit
- images
- image processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007689 inspection Methods 0.000 title claims description 86
- 238000003672 processing method Methods 0.000 title claims description 20
- 238000012545 processing Methods 0.000 claims description 74
- 238000003384 imaging method Methods 0.000 claims description 61
- 238000006243 chemical reaction Methods 0.000 claims description 52
- 230000001681 protective effect Effects 0.000 claims description 19
- 230000004044 response Effects 0.000 claims description 14
- 239000011159 matrix material Substances 0.000 claims description 3
- 239000013598 vector Substances 0.000 claims description 3
- 238000011161 development Methods 0.000 description 61
- 238000000034 method Methods 0.000 description 30
- 238000010586 diagram Methods 0.000 description 28
- 230000009467 reduction Effects 0.000 description 18
- 238000004891 communication Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 12
- 230000006870 function Effects 0.000 description 10
- 238000012790 confirmation Methods 0.000 description 9
- 238000013441 quality evaluation Methods 0.000 description 5
- 230000010365 information processing Effects 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000002194 synthesizing effect Effects 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/579—Depth or shape recovery from multiple images from motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10032—Satellite or aerial image; Remote sensing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20076—Probabilistic image processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2219/00—Indexing scheme for manipulating 3D models or images for computer graphics
- G06T2219/004—Annotating, labelling
Description
図1は、第1の実施形態に係る画像処理装置による画像処理を概略的に説明するための図である。図1(a)において、物体100は、例えば橋梁などの建造物であり、ひび101が含まれている。物体100の観察者(例えば橋梁の点検者)は、ひび101の状態を観察(点検)するために、観察対象であるひび101を異なる観察点から撮影し、2次元画像としての複数の撮像画像を得る。
図5は、第1の実施形態に適用可能な画像処理装置のハードウェア構成の例を示す。図5において、画像処理装置1000は、CPU(Central Processing Unit)1010と、ROM(Read Only Memory)1011と、RAM(Random Access Memory)1012と、グラフィクスI/F1013と、ストレージ1015と、データI/F1016と、通信I/F1019とを含み、これら各部がバス1030により互いに通信可能に接続される。このように、第1の実施形態に係る画像処理装置1000は、一般的なコンピュータを用いて実現できる。

次に、第2の実施形態について説明する。第2の実施形態は、上述した第1の実施形態に係る画像処理装置1000により得られる各画像の閲覧などを行うためのユーザインタフェース(UI)を提供する。
次に、第2の実施形態に係るUIについて、より具体的に説明する。なお、以下では、第2の実施形態に係る画像処理装置1001が、橋梁などの建造物の点検に用いる撮像画像に基づくパノラマ画像140を表示させるものとして説明を行う。
図13は、第2の実施形態に係るUI部1121により提示されるUI画面の第1の例を示す。この第1の例に係るUI画面は、例えば、パノラマ画像を用いて点検作業を行う場合に用いて好適な画面である。
図14−1、図14−2および図14−3は、第2の実施形態に係るUI画面の第2の例を示す。この第2の例に係るUI画面は、パノラマ画像140の図面に対する位置合わせを行うための画面である。なお、図14−1、図14−2および図14−3において、上述した図13と共通する部分には同一の符号を付して、詳細な説明を省略する。
図15は、第2の実施形態に係るUI画面の第3の例を示す。この第3の例に係るUI画面は、パノラマ画像140に用いられた撮像画像の撮像品質を確認するための画面である。なお、図15において、上述した図13と共通する部分には同一の符号を付して、詳細な説明を省略する。また、図15において、パノラマ画像表示領域210には、図14−1および図14−2を用いて説明した、図面2106に合わせて大きさおよび形状を変換したパノラマ画像140’が表示されているものとする。
図16は、第2の実施形態に係るUI画面の第4の例を示す。この第4の例に係るUI画面は、パノラマ画像140の閲覧状況を確認するための画面である。なお、図16において、上述した図13と共通する部分には同一の符号を付して、詳細な説明を省略する。また、図16において、パノラマ画像表示領域210には、図14−1および図14−2を用いて説明した、図面2106に合わせて大きさおよび形状を変換したパノラマ画像140’が表示されているものとする。
図17は、第2の実施形態に係るUI画面の第5の例を示す。図13に示したUI画面200aのパノラマ選択領域230aでは、1つの観察対象における異なる面のパノラマ画像をそれぞれ2次元画像を用いて表示していた。これに対して、この第5の例によるUI画面200a’のパノラマ選択領域230bは、1つの観察対象における異なる面のパノラマ画像を、各面のパノラマ画像を統合した3次元画像を用いて表示する。なお、図17において、上述した図13と共通する部分には同一の符号を付して、詳細な説明を省略する。
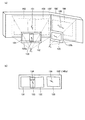
次に、第3の実施形態について説明する。第3の実施形態は、上述した第1の実施形態および第2の実施形態に共通して適用可能な撮像装置を提供するものである。第3の実施形態では、カメラを遠隔操作可能な飛行体に搭載して撮像装置を構成する。第3の実施形態にて提供される撮像装置と、上述した画像処理装置1000または1001とを用いることにより、観察対象の点検をより容易に実行可能な点検システムを構成できる。
111,121,133,136
130,130’,130a,130b 2次元展開図
140,140’,140a パノラマ画像
150,150’ 3次元メッシュ
200a,200a’,200b,200b’,200c,200d,200e UI画面
210 パノラマ画像表示領域
220 点検画像表示領域
230 パノラマ選択領域
240 動作指定領域
300 撮像装置
313,3005 カメラ
320a,320b,320c,320c’,320d,320d’ 保護部材
1000 画像処理装置
1010 CPU
1014 ディプレイ
1015 ストレージ
1017 ポインティングデバイス
1100 画像取得部
1101 画像記憶部
1102 3D点群取得部
1103 3Dメッシュ生成部
1104 2D展開図生成部
1105 変換係数生成部
1106 変形部
1107 注釈重畳部
1108 指定部
2100a 点検画像
Claims (23)
- 複数の2次元画像から対象物体の少なくとも一部を含む3次元モデルを生成する3次元モデル生成ステップと、
前記3次元モデルの少なくとも一部を3次元メッシュで近似する3次元メッシュ近似ステップと、
前記3次元メッシュを2次元パノラマ座標に変換する係数を決定する変換係数決定ステップと、
前記2次元パノラマ座標の部分に対応する複数の2次元画像から第1の画像を決定する第1の画像決定ステップと、
前記2次元パノラマ座標に投影するためのコンテンツと、前記第1の画像上での第1の位置とを、該第1の画像に応じて指定する第1の指定ステップと、
前記コンテンツの前記2次元パノラマ座標上での投影に対応する第2の位置を決定する第2の位置決定ステップと、
前記第2の位置と前記コンテンツとを関連付けて記憶する第1の記憶ステップと、
前記第1の画像を前記2次元パノラマ座標上に投影した第2の画像に、前記コンテンツを注釈として重畳させる第1の重畳ステップと、
前記複数の2次元画像から第3の画像を決定する第3の画像決定ステップと、
前記第1の位置の、前記第3の画像への投影に対応する第3の位置を決定する第3の位置決定ステップと、
前記第3の画像上の前記第3の位置に、前記コンテンツを投影し、注釈として重畳させる第2の重畳ステップと
を有する画像処理方法。 - 前記第3の画像決定ステップは、
それぞれ2次元画像である複数の撮像画像の撮像順に基づき前記第3の画像を決定する
請求項1に記載の画像処理方法。 - 前記第3の画像決定ステップは、
それぞれ2次元画像である複数の撮像画像の空間位置に基づき前記第3の画像を決定する
請求項1に記載の画像処理方法。 - 前記第3の画像決定ステップは、
ユーザ操作に応じて前記パノラマ座標に対して指定されたユーザ指定位置の前記複数の2次元画像における座標上への投影に対する投影位置と、前記複数の2次元画像上の該投影位置周辺の解像度とのうち少なくとも一方と、前記ユーザ指定位置とに基づき前記第3の画像を決定する
請求項1に記載の画像処理方法。 - 前記3次元メッシュ近似ステップは、可展面の前記3次元メッシュを生成する
請求項1に記載の画像処理方法。 - 前記3次元メッシュ近似ステップは、平面の前記3次元メッシュを生成する
請求項1に記載の画像処理方法。 - 前記3次元メッシュ近似ステップは、円柱面の前記3次元メッシュを生成する
請求項1に記載の画像処理方法。 - 前記3次元メッシュ近似ステップは、2次曲面の前記3次元メッシュを生成する
請求項1に記載の画像処理方法。 - 前記3次元メッシュ近似ステップは、球面の前記3次元メッシュを生成する
請求項1に記載の画像処理方法。 - 前記変換係数決定ステップは、
前記3次元メッシュを構成する各部分平面を、法線方向から見た形状および相対面積を保ったまま2次元座標に変換する
請求項1に記載の画像処理方法。 - 前記変換係数決定ステップは、
ホモグラフィ行列を用いて前記変換する係数を算出する
請求項1に記載の画像処理方法。 - 前記変換係数決定ステップは、
前記3次元メッシュを、ユーザ操作に応じて所定の方向に移動させる3次元メッシュ調整ステップを含む
請求項1に記載の画像処理方法。 - 前記変換係数決定ステップは、
前記所定の方向を、前記3次元メッシュの各部分平面の法線ベクトルの重み付け和に基づき決定する
請求項12に記載の画像処理方法。 - 前記第1の画像に投影するためのコンテンツと、前記2次元パノラマ座標上での第4の位置とを、前記第2の画像に応じて指定する第2の指定ステップと、
前記第4の位置と前記コンテンツとを関連付けて記憶する第2の記憶ステップと、
前記第1の画像上での前記コンテンツの投影に対応する投影位置を決定する第4の位置決定ステップと、
前記投影位置に対応する前記第1の画像に、前記コンテンツを注釈として重畳させる第3の重畳ステップと
をさらに有する請求項1に記載の画像処理方法。 - 請求項1乃至請求項14の何れか1項に記載の画像処理方法をコンピュータに実行させるためのプログラムがコンピュータにより実行されることで実現される画像処理装置に接続される表示装置であって、
画像の表示とユーザ入力の検出とを行うためのユーザインタフェース画面を表示させる表示制御情報を生成するユーザインタフェース部を備え、
前記ユーザインタフェース画面は、
前記第1の画像を表示し、前記ユーザ入力を検出する第1の表示領域と、
前記第2の画像を表示し、前記ユーザ入力を検出する第2の表示領域と、
前記ユーザ入力を検出し、1つ以上の前記第2の画像から少なくとも1つを選択する第3の表示領域と、
を含み、
前記第3の表示領域に、1つ以上の前記第2の画像を組み合わせて3次元形状として表示する、
表示装置。 - 請求項1乃至請求項14の何れか1項に記載の画像処理方法をコンピュータに実行させるためのプログラムがコンピュータにより実行されることで実現される画像処理装置に接続される表示装置であって、
画像の表示とユーザ入力の検出とを行うためのユーザインタフェース画面を表示させる表示制御情報を生成するユーザインタフェース部を備え、
前記ユーザインタフェース画面は、
前記第1の画像を表示し、前記ユーザ入力を検出する第1の表示領域と、
前記第2の画像を表示し、前記ユーザ入力を検出する第2の表示領域と、
前記ユーザ入力を検出し、1つ以上の前記第2の画像から少なくとも1つを選択する第3の表示領域と、
を含み、
図面を表示し、
前記図面の座標と前記第2の画像の座標とを対応付ける2つ以上の対応点を前記ユーザ入力に応じて指定し、
該ユーザ入力に応じて指定された2つ以上の該対応点に基づき、前記図面の座標と前記第2の画像の座標との間の座標変換係数を求め、該座標変換係数を用いて前記第2の画像の座標を前記図面の座標に変換する、
表示装置。 - 前記ユーザインタフェース画面は、
設定を表示し、ユーザ入力を検出する第4の表示領域をさらに含む
請求項15または請求項16に記載の表示装置。 - 前記ユーザインタフェース部は、
前記ユーザ入力に応じて図形を選択し、
選択された該図形の2つ以上のコントロールポイントそれぞれに対応する2つ以上の対応点を前記第2の画像の座標上で前記ユーザ入力に応じて指定し、
選択された該図形の2つ以上のコントロールポイントと、2つ以上の該指定した対応点との組み合わせから該図形と該第2の画像との間の座標変換係数を求め、該座標変換係数を用いて前記第2の画像の形状を該図形の形状に変換する
請求項15または請求項16に記載の表示装置。 - 前記ユーザインタフェース部は、
2つの前記対応点の間の距離を示す値を前記ユーザ入力に応じて入力する
請求項16に記載の表示装置。 - 前記ユーザインタフェース部は、
前記第2の表示領域に、前記第2の画像の領域毎の画像品質を、色分けおよび等高線の少なくとも1つを用いて表示し、
前記画像品質は、撮像解像度と、撮像距離と、暈け度合と、コントラストとのうち少なくとも1つを含む
請求項15に記載の表示装置。 - 前記ユーザインタフェース部は、
前記第1の表示領域に表示された画像の閲覧履歴を記憶媒体に記憶し、
該閲覧履歴に基づき、前記第2の表示領域に閲覧済み領域を表示する
請求項15に記載の表示装置。 - 前記ユーザインタフェース部は、
前記第1の表示領域で注釈を入力した画像を選択して前記閲覧済み領域に表示させる
請求項21に記載の表示装置。 - 画像を用いた点検を実行するための点検システムであって、
2次元画像を出力するカメラと、飛行機構を含み該カメラが設けられる胴体と、該カメラおよび該胴体が外部の物体に直接接触しないように該カメラおよび該胴体を囲う保護部材とを含む撮像装置と、
請求項1乃至請求項14の何れか1項に記載の画像処理方法をコンピュータに実行させるためのプログラムがコンピュータにより実行されることで実現される画像処理装置と、
請求項15乃至請求項22の何れか1項に記載の表示装置と
を含む点検システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/009342 WO2017155005A1 (en) | 2016-03-09 | 2017-03-08 | Image processing method, display device, and inspection system |
| CN201780015932.5A CN108780586B (zh) | 2016-03-09 | 2017-03-08 | 图像处理方法、显示设备和检查系统 |
| EP17763345.0A EP3427232B1 (en) | 2016-03-09 | 2017-03-08 | Image processing method, display device, and inspection system |
| CA3016539A CA3016539C (en) | 2016-03-09 | 2017-03-08 | Image processing method, display device, and inspection system |
| US16/082,799 US10818099B2 (en) | 2016-03-09 | 2017-03-08 | Image processing method, display device, and inspection system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016046322 | 2016-03-09 | ||
| JP2016046322 | 2016-03-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017168077A JP2017168077A (ja) | 2017-09-21 |
| JP6835536B2 true JP6835536B2 (ja) | 2021-02-24 |
Family
ID=59909084
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016217782A Active JP6835536B2 (ja) | 2016-03-09 | 2016-11-08 | 画像処理方法、表示装置および点検システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10818099B2 (ja) |
| EP (1) | EP3427232B1 (ja) |
| JP (1) | JP6835536B2 (ja) |
| CN (1) | CN108780586B (ja) |
| CA (1) | CA3016539C (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6470323B2 (ja) | 2017-01-23 | 2019-02-13 | ファナック株式会社 | 情報表示システム |
| JP6621962B2 (ja) * | 2017-03-21 | 2019-12-18 | 三菱電機株式会社 | 監視画面データ生成装置、監視画面データ生成方法、および監視画面データ生成プログラム |
| CN108876934B (zh) * | 2017-12-20 | 2022-01-28 | 北京旷视科技有限公司 | 关键点标注方法、装置和系统及存储介质 |
| WO2019130827A1 (ja) * | 2017-12-25 | 2019-07-04 | キヤノン株式会社 | 画像処理装置およびその制御方法 |
| JP7058585B2 (ja) * | 2017-12-25 | 2022-04-22 | キヤノン株式会社 | 画像処理装置およびその制御方法 |
| TWI634515B (zh) * | 2018-01-25 | 2018-09-01 | 廣達電腦股份有限公司 | 三維影像處理之裝置及方法 |
| JP7272015B2 (ja) * | 2018-03-14 | 2023-05-12 | 株式会社リコー | 診断管理サーバ、診断システム、診断管理方法、及びプログラム |
| JP7020260B2 (ja) * | 2018-04-13 | 2022-02-16 | 株式会社大林組 | 孔壁観察システム |
| CN108600716A (zh) * | 2018-05-17 | 2018-09-28 | 京东方科技集团股份有限公司 | 投影设备和系统、投影方法 |
| EP3820139B1 (en) * | 2018-07-03 | 2023-09-13 | FUJIFILM Corporation | Image-capture plan presentation apparatus and method |
| JP7033045B2 (ja) * | 2018-10-17 | 2022-03-09 | 株式会社神戸製鋼所 | 学習装置、推定装置、亀裂検出装置、亀裂検出システム、学習方法、推定方法、亀裂検出方法、及びプログラム |
| JP7207073B2 (ja) * | 2019-03-27 | 2023-01-18 | 富士通株式会社 | 点検作業支援装置、点検作業支援方法及び点検作業支援プログラム |
| CN110033515B (zh) * | 2019-04-15 | 2023-04-07 | 同济大学建筑设计研究院(集团)有限公司 | 图形转换方法、装置、计算机设备及存储介质 |
| CN110246175A (zh) * | 2019-05-24 | 2019-09-17 | 国网安徽省电力有限公司检修分公司 | 全景相机与云台相机结合的变电站巡检机器人图像检测系统及方法 |
| WO2021010038A1 (ja) * | 2019-07-18 | 2021-01-21 | 富士フイルム株式会社 | 情報表示装置、方法及びプログラム |
| JP7326446B2 (ja) * | 2019-07-19 | 2023-08-15 | 富士フイルム株式会社 | 画像表示装置、方法及びプログラム |
| CN114175019A (zh) * | 2019-07-19 | 2022-03-11 | 富士胶片株式会社 | 图像显示装置、方法及程序 |
| JP7403273B2 (ja) * | 2019-10-16 | 2023-12-22 | 東芝プラントシステム株式会社 | 画像処理装置、及び画像処理方法 |
| CN111091117B (zh) * | 2019-12-31 | 2021-01-29 | 北京城市网邻信息技术有限公司 | 用于二维全景图像的目标检测方法、装置、设备、介质 |
| CN111325823B (zh) * | 2020-02-05 | 2022-09-27 | 腾讯科技(深圳)有限公司 | 人脸纹理图像的获取方法、装置、设备及存储介质 |
| JP7447238B2 (ja) | 2020-02-28 | 2024-03-11 | 富士フイルム株式会社 | 画像表示装置、画像表示方法、及びプログラム |
| WO2021176877A1 (ja) * | 2020-03-02 | 2021-09-10 | 富士フイルム株式会社 | 画像処理装置、画像処理方法、及び画像処理プログラム |
| CN115176281A (zh) * | 2020-03-03 | 2022-10-11 | 富士胶片株式会社 | 三维显示装置、方法及程序 |
| CN115176284A (zh) * | 2020-03-16 | 2022-10-11 | 富士胶片株式会社 | 图像处理装置、图像处理方法及图像处理程序 |
| CN111429518B (zh) * | 2020-03-24 | 2023-10-03 | 浙江大华技术股份有限公司 | 一种标注方法、装置、计算设备及存储介质 |
| CN113222943B (zh) * | 2021-05-18 | 2022-05-03 | 宁波智能装备研究院有限公司 | 一种基于混合网格变换模型的图像形变估计方法 |
| CN114401362A (zh) * | 2021-12-29 | 2022-04-26 | 影石创新科技股份有限公司 | 一种图像显示方法、装置和电子设备 |
| WO2023188510A1 (ja) * | 2022-03-29 | 2023-10-05 | 富士フイルム株式会社 | 画像処理装置、画像処理方法、及びプログラム |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6246412B1 (en) * | 1998-06-18 | 2001-06-12 | Microsoft Corporation | Interactive construction and refinement of 3D models from multiple panoramic images |
| US7098914B1 (en) * | 1999-07-30 | 2006-08-29 | Canon Kabushiki Kaisha | Image synthesis method, image synthesis apparatus, and storage medium |
| GB9930850D0 (en) * | 1999-12-24 | 2000-02-16 | Koninkl Philips Electronics Nv | 3D environment labelling |
| FR2804936B1 (fr) | 2000-02-15 | 2002-06-07 | Bertin Technologies Sa | Engin volant telecommande, en particulier de surveillance ou d'inspection |
| EP1820159A1 (en) * | 2004-11-12 | 2007-08-22 | MOK3, Inc. | Method for inter-scene transitions |
| US8072448B2 (en) | 2008-01-15 | 2011-12-06 | Google Inc. | Three-dimensional annotations for street view data |
| JP2010049313A (ja) * | 2008-08-19 | 2010-03-04 | Sony Corp | 画像処理装置、画像処理方法、プログラム |
| JP2011046355A (ja) * | 2009-08-28 | 2011-03-10 | Kitakyushu Foundation For The Advancement Of Industry Science & Technology | 飛行体 |
| US20140340427A1 (en) * | 2012-01-18 | 2014-11-20 | Logos Technologies Llc | Method, device, and system for computing a spherical projection image based on two-dimensional images |
| JP5940393B2 (ja) * | 2012-07-02 | 2016-06-29 | Kddi株式会社 | 点検補助装置及び方法 |
| FR2998400B1 (fr) * | 2012-11-21 | 2016-01-15 | Thales Sa | Procede de reconstruction 3d et de mosaiquage 3d panoramique d'une scene |
| KR102003383B1 (ko) * | 2013-03-14 | 2019-07-24 | 삼성전자주식회사 | 전자 장치에서 이미지를 촬영하는 위한 장치 및 방법 |
| NL2010463C2 (nl) * | 2013-03-15 | 2014-09-16 | Cyclomedia Technology B V | Werkwijze voor het genereren van een panoramabeeld. |
| JP2015001756A (ja) | 2013-06-13 | 2015-01-05 | 株式会社日立製作所 | 状態変化管理システム、状態変化管理サーバ及び状態変化管理端末 |
| JP6470567B2 (ja) * | 2014-02-03 | 2019-02-13 | 株式会社プロスパークリエイティブ | 画像検査装置及び画像検査プログラム |
| WO2015127535A1 (en) * | 2014-02-26 | 2015-09-03 | Searidge Technologies Inc. | Image stitching and automatic-color correction |
| JP6344050B2 (ja) | 2014-05-16 | 2018-06-20 | 株式会社リコー | 画像処理システム、画像処理装置、プログラム |
| US10659750B2 (en) * | 2014-07-23 | 2020-05-19 | Apple Inc. | Method and system for presenting at least part of an image of a real object in a view of a real environment, and method and system for selecting a subset of a plurality of images |
| KR102281180B1 (ko) * | 2014-11-21 | 2021-07-23 | 삼성전자주식회사 | 영상 처리 장치 및 방법 |
| US20180075652A1 (en) * | 2016-09-13 | 2018-03-15 | Next Aeon Inc. | Server and method for producing virtual reality image about object |
-
2016
- 2016-11-08 JP JP2016217782A patent/JP6835536B2/ja active Active
-
2017
- 2017-03-08 CA CA3016539A patent/CA3016539C/en active Active
- 2017-03-08 EP EP17763345.0A patent/EP3427232B1/en active Active
- 2017-03-08 CN CN201780015932.5A patent/CN108780586B/zh active Active
- 2017-03-08 US US16/082,799 patent/US10818099B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3427232A4 (en) | 2019-02-27 |
| CA3016539C (en) | 2023-04-04 |
| US10818099B2 (en) | 2020-10-27 |
| CA3016539A1 (en) | 2017-09-14 |
| EP3427232B1 (en) | 2022-09-07 |
| EP3427232A1 (en) | 2019-01-16 |
| US20190026955A1 (en) | 2019-01-24 |
| CN108780586B (zh) | 2023-05-05 |
| JP2017168077A (ja) | 2017-09-21 |
| CN108780586A (zh) | 2018-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6835536B2 (ja) | 画像処理方法、表示装置および点検システム | |
| US20210166495A1 (en) | Capturing and aligning three-dimensional scenes | |
| JP5343042B2 (ja) | 点群データ処理装置および点群データ処理プログラム | |
| JP5388932B2 (ja) | 情報処理装置およびその制御方法 | |
| US10008028B2 (en) | 3D scanning apparatus including scanning sensor detachable from screen | |
| JP5538667B2 (ja) | 位置姿勢計測装置及びその制御方法 | |
| JP6733267B2 (ja) | 情報処理プログラム、情報処理方法および情報処理装置 | |
| JP4262014B2 (ja) | 画像撮影装置および画像処理方法 | |
| JP6642968B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| US7046838B1 (en) | Three-dimensional data input method and apparatus | |
| JP5593177B2 (ja) | 点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム | |
| JP6594129B2 (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP4608326B2 (ja) | 指示動作認識装置及び指示動作認識プログラム | |
| JP7073850B2 (ja) | 入力装置および入力装置の入力方法 | |
| JP4306006B2 (ja) | 3次元データ入力方法及び装置 | |
| JP2009278456A (ja) | 映像表示装置 | |
| WO2020003548A1 (ja) | 画像表示システムおよび方法 | |
| WO2017155005A1 (en) | Image processing method, display device, and inspection system | |
| JP2010112731A (ja) | ロボットの座標の結合方法 | |
| JP7334460B2 (ja) | 作業支援装置及び作業支援方法 | |
| JP6632298B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP6230923B2 (ja) | 水中移動体の位置検知装置及び位置検知方法 | |
| JP4112925B2 (ja) | 画像入力装置、画像入力方法、及びコンピュータが実行するためのプログラム | |
| JP2019101753A (ja) | 物体形状測定装置及びその制御方法、並びにプログラム | |
| WO2023248353A1 (ja) | ワークの位置データを取得する装置、制御装置、ロボットシステム、方法、及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20161129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20161130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6835536 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |