JP6806581B2 - 位置センサまで延在する分離型レバーアームを有する力伝達機構 - Google Patents
位置センサまで延在する分離型レバーアームを有する力伝達機構 Download PDFInfo
- Publication number
- JP6806581B2 JP6806581B2 JP2017016817A JP2017016817A JP6806581B2 JP 6806581 B2 JP6806581 B2 JP 6806581B2 JP 2017016817 A JP2017016817 A JP 2017016817A JP 2017016817 A JP2017016817 A JP 2017016817A JP 6806581 B2 JP6806581 B2 JP 6806581B2
- Authority
- JP
- Japan
- Prior art keywords
- lever arm
- force
- transmission mechanism
- force transmission
- partial lever
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 title claims description 111
- 230000007246 mechanism Effects 0.000 title claims description 108
- 238000012546 transfer Methods 0.000 claims description 52
- 238000005303 weighing Methods 0.000 claims description 28
- 238000005259 measurement Methods 0.000 claims description 18
- 230000033001 locomotion Effects 0.000 claims description 12
- 238000006073 displacement reaction Methods 0.000 claims description 9
- 230000001447 compensatory effect Effects 0.000 claims description 8
- 230000003287 optical effect Effects 0.000 claims description 8
- 230000005693 optoelectronics Effects 0.000 claims description 8
- 238000013519 translation Methods 0.000 claims description 2
- 230000009467 reduction Effects 0.000 description 9
- 238000005452 bending Methods 0.000 description 8
- 238000013461 design Methods 0.000 description 8
- 238000005520 cutting process Methods 0.000 description 6
- 238000000926 separation method Methods 0.000 description 6
- 230000004907 flux Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000002411 adverse Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 1
- 238000004512 die casting Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 238000012067 mathematical method Methods 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 230000003071 parasitic effect Effects 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G21/00—Details of weighing apparatus
- G01G21/24—Guides or linkages for ensuring parallel motion of the weigh-pans
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G21/00—Details of weighing apparatus
- G01G21/24—Guides or linkages for ensuring parallel motion of the weigh-pans
- G01G21/244—Guides or linkages for ensuring parallel motion of the weigh-pans combined with flexure-plate fulcrums
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G7/00—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups
- G01G7/02—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Shutters For Cameras (AREA)
- Transmission Devices (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
- Measuring Fluid Pressure (AREA)
Description
上記実施形態の記載から把握される形態の例を以下に示す。
[形態1]
電磁力補償の原理に基づく力測定装置用の力伝達機構(200,400,500,600,700,800,900,1000,1100)であって、
平行移動ガイド機構を備え、
前記平行移動ガイド機構は、
可動平行脚部(140,440,540,640,740,840,1140)と、
固定平行脚部(145,445,545,645,745,845,1145)と、
少なくとも2つの平行ガイド部材(150,450,550,650,750,850,950,1150)と
を備え、
前記平行脚部(140,145,440,445,540,545,640,645,740,745,840,845,1140,1145)および前記平行ガイド部材(150,450,550,650,750,850,950,1150)は、撓みピボット(160,860,1160)によって互いに接続され、
前記可動平行脚部(140,440,540,640,740,840,1140)は、前記平行ガイド部材(150,450,550,650,750,850,950,1150)によって、案内された可動性で、前記固定平行脚部(145,445,545,645,745,845,1145)に対して拘束され、
前記力伝達機構は、さらに、前記固定平行脚部(140,145,440,445,540,545,640,645,740,745,840,845,1140,1145)に配置された支点ピボット(190,490,590,690,790,890,990,1090,1190)上で枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)を備え、
前記力伝達レバーは、
連結部材(470,570,870,1170)を介して前記可動平行脚部(140,440,540,640,740,840,1140)に力伝達接続される第1のレバーアーム(181,281,481,581,681,781,881,981,1081,1181)と、
測定トランスデューサ(110,310A,310B,410,510,610,710,1010)が力伝達接続部を介して取り付けられ得る第2のレバーアーム(182,282,482,582,682,782,882,982,1082,1182)と、 を備え、
前記第2のレバーアーム(282,482,582,682,782,882,982,1082,1182)は、第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)と第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)とを備え、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)は、前記測定トランスデューサ(110,310A,310B,410,510,610,710,1010)によって発生される補償力を受けるように構成され、
前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、位置センサ(120,420,520,620,720,1020)のゼロ基準からの前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の変位を検出するように構成された
力伝達機構。
[形態2]
形態1に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記測定トランスデューサ(110,310A,310B,410,510,610,710,1010)によって発生される補償力が実質的に前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)を介して前記可動平行脚部(140,440,540,640,740,840,1140)に伝達されるように、それらの長さ方向の延長にわたって、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)の近傍まで、互いから分離される
力伝達機構。
[形態3]
形態1または形態2に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、それらの長さ方向の延長にわたって、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)を超えて、互いから分離される
力伝達機構。
[形態4]
形態1ないし形態3のいずれか一項に記載の力伝達機構であって、
前記第2のレバーアーム(1182)は、分割された第1の部分レバーアーム(1182A)を有し、
前記分割された第1の部分レバーアームは、前記補償力が、実質的に等しい分担で、前記分割された第1の部分レバーアームを通って前記可動平行脚部(1140)に伝達されるように構成された
力伝達機構。
[形態5]
形態4に記載の力伝達機構であって、
前記第2の部分レバーアーム(1182B)は、前記分割された第1の部分レバーアーム(1182A)の分岐部の間に配置される
力伝達機構。
[形態6]
形態1ないし形態5のいずれか一項に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記2つの部分レバーアームが、前記平行ガイド部材(150,450,550,650,750,850,950,1150)と平行に延在する個別の複数の平面において上下になるように、互いから分離される
力伝達機構。
[形態7]
形態1ないし形態5のいずれか一項に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記2つの部分レバーアームが、前記平行ガイド部材(150,450,550,650,750,850,950,1150)と平行に延在する1つの同一の平面において並ぶように、互いから分離される
力伝達機構。
[形態8]
形態1ないし形態7のいずれか一項に記載の力伝達機構であって、
前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)に対して角度(w)で配置され、前記角度(w)の頂点は、前記支点ピボット(190,490,590,690,790,890,990,1090,1190)にある
力伝達機構。
[形態9]
形態1ないし形態8のいずれか一項に記載の力伝達機構であって、
シャッタベーン(121)が、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)から遠い側の端部のところで、前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)に配置される
力伝達機構。
[形態10]
形態9に記載の力伝達機構であって、
前記シャッタベーン(121)は、開口部、特に、最短幅を有する開口スロットまたは長穴を有する
力伝達機構。
[形態11]
形態10に記載の力伝達機構であって、
前記力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)と、前記最短幅の中点と、の接続線は、前記最短幅に実質的に直交する
力伝達機構。
[形態12]
形態1ないし形態11のいずれか一項に記載の力伝達機構であって、
前記固定平行脚部(145,445,545,645,745,845,1145)、前記可動平行脚部(140,440,540,640,740,840,1140)および前記力伝達レバー(280,480,580,680,780,880,980,1080,1180)は、一体的で均質な材料ブロックから一部品に製造され、
撓みピボット(160,860,1160)が薄い材料のブリッジ形状に構成される
力伝達機構。
[形態13]
形態12に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)の少なくとも一方は、前記2つの部分レバーアームの少なくとも一方が前記一体的で均質な材料ブロックの外部を延在し得るように構成される
力伝達機構。
[形態14]
形態1ないし形態13のいずれか一項に記載の力伝達機構(200,400,500,600,700,800,900,1000,1100)を備える、電磁力補償の原理に基づく力測定装置であって、
秤量負荷の重量力を受けるために、前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)と前記固定平行脚部(145,445,545,645,745,845,1145)との間に配置された測定トランスデューサ(110,310A,310B,410,510,610,710,1010)を備え、
前記測定トランスデューサは、
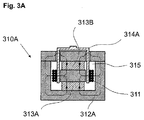
エアギャップ(115,315)を有し、前記固定平行脚部(145,445,545,645,745,845,1145)または前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)に配置された永久磁石システム(113,313A,313B)と、
前記永久磁石システム(113,313A,313B)にしたがって前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)または前記固定平行脚部(145,445,545,645,745,845,1145)に取り付けられ、前記永久磁石システム(113,313A,313B)の前記エアギャップ(115,315)内を移動可能であり、測定動作が行われているときに補償電流が流れるコイル(111,311)と
を備え、
前記力測定装置は、さらに、光電子式位置センサ(120,420,520,620,720,1020)を備え、
前記光電子式位置センサは、
光源と、
受光器と
を備え、
前記光源および前記受光器は、それらの間に自由空間を有する状態で前記固定平行脚部(145,445,545,645,745,845,1145)に配置され、
前記光電子式位置センサは、さらに、シャッタベーン(121)を備え、
前記シャッタベーン(121)は、前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)に配置され、前記コイル(111,311)の移動に関与し、前記発光体と前記受光器との間の前記自由空間を光ゲートの態様で横切る
力測定装置。
[形態15]
形態14に記載の力測定装置を有する重量測定機器。
200,400,500,600,700,800,900,1000…力伝達機構
110,310A,310B,410,510,610,710,1010…測定トランスデューサ
111,311…補償コイル
112,312A,312B…磁束、力線
113,313A,313B…永久磁石システム
114,314A,314B…コイルキャリア
115,315…エアギャップ
120,420,520,620,720,1020…位置センサ
121…シャッタベーン
130…秤量パン
140,440,540,640,740,840,1140…可動平行脚部
145,445,545,645,745,845,1145…固定平行脚部
150,450,550,650,750,850,950,1150…平行ガイド部材
160,860,1160…平行ガイド部材の撓みピボット
165,865,1165…連結部材の撓みピボット
170,470,570,870,1170…連結部材
180,280,480,580,680,780,880,980,1080,1180…力伝達レバー
181,281,481,581,681,781,881,981,1081,1181…負荷アーム、第1のレバーアーム
182,282,482,582,682,782,882,982,1082,1182…力伝達アーム、第2のレバーアーム
282A,482A,582A,682A,782A,882A,982A,1082A,1182A…第1の部分レバーアーム
282B,482B,582B,682B,782B,882B,982B,1082B,1182B…第2の部分レバーアーム
883,983,1183…分離切断部
1187…位置センサおよびシャッタベーン用の固定構造
888,1088…側面
889,989,1189…レバー延長部用の固定構造
190,490,590,690,790,890,990,1090,1190…支持支点、伝達レバーの枢動支持部
Claims (14)
- 電磁力補償の原理に基づく力測定装置用の力伝達機構(200,400,500,600,700,800,900,1000,1100)であって、
平行移動ガイド機構を備え、
前記平行移動ガイド機構は、
可動平行脚部(140,440,540,640,740,840,1140)と、
固定平行脚部(145,445,545,645,745,845,1145)と、
少なくとも2つの平行ガイド部材(150,450,550,650,750,850,950,1150)と
を備え、
前記平行脚部(140,145,440,445,540,545,640,645,740,745,840,845,1140,1145)および前記平行ガイド部材(150,450,550,650,750,850,950,1150)は、撓みピボット(160,860,1160)によって互いに接続され、
前記可動平行脚部(140,440,540,640,740,840,1140)は、前記平行ガイド部材(150,450,550,650,750,850,950,1150)によって、案内された可動性で、前記固定平行脚部(145,445,545,645,745,845,1145)に対して拘束され、
前記力伝達機構は、さらに、前記固定平行脚部(140,145,440,445,540,545,640,645,740,745,840,845,1140,1145)に配置された支点ピボット(190,490,590,690,790,890,990,1090,1190)上で枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)を備え、
前記力伝達レバーは、
連結部材(470,570,870,1170)を介して前記可動平行脚部(140,440,540,640,740,840,1140)に力伝達接続される第1のレバーアーム(181,281,481,581,681,781,881,981,1081,1181)と、
測定トランスデューサ(110,310A,310B,410,510,610,710,1010)が力伝達接続部を介して取り付けられ得る第2のレバーアーム(182,282,482,582,682,782,882,982,1082,1182)と、 を備え、
前記第2のレバーアーム(282,482,582,682,782,882,982,1082,1182)は、第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)と第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)とを備え、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)は、前記測定トランスデューサ(110,310A,310B,410,510,610,710,1010)によって発生される補償力を受けるように構成され、
前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、位置センサ(120,420,520,620,720,1020)のゼロ基準からの前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の変位を検出するように構成され、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記測定トランスデューサ(110,310A,310B,410,510,610,710,1010)によって発生される補償力が実質的に前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)を介して前記可動平行脚部(140,440,540,640,740,840,1140)に伝達されるように、それらの長さ方向の延長にわたって、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)の近傍まで、互いから分離される
力伝達機構。 - 請求項1に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、それらの長さ方向の延長にわたって、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)を超えて、互いから分離される
力伝達機構。 - 請求項1又は2のいずれか一項に記載の力伝達機構であって、
前記第2のレバーアーム(1182)は、分割された第1の部分レバーアーム(1182A)を有し、
前記分割された第1の部分レバーアームは、前記補償力が、実質的に等しい分担で、前記分割された第1の部分レバーアームを通って前記可動平行脚部(1140)に伝達されるように構成された
力伝達機構。 - 請求項3に記載の力伝達機構であって、
前記第2の部分レバーアーム(1182B)は、前記分割された第1の部分レバーアーム(1182A)の分岐部の間に配置される
力伝達機構。 - 請求項1ないし請求項4のいずれか一項に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記2つの部分レバーアームが、前記平行ガイド部材(150,450,550,650,750,850,950,1150)と平行に延在する個別の複数の平面において上下になるように、互いから分離される
力伝達機構。 - 請求項1ないし請求項4のいずれか一項に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記2つの部分レバーアームが、前記平行ガイド部材(150,450,550,650,750,850,950,1150)と平行に延在する1つの同一の平面において並ぶように、互いから分離される
力伝達機構。 - 請求項1ないし請求項6のいずれか一項に記載の力伝達機構であって、
前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)は、前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)に対して角度(w)で配置され、前記角度(w)の頂点は、前記支点ピボット(190,490,590,690,790,890,990,1090,1190)にある
力伝達機構。 - 請求項1ないし請求項7のいずれか一項に記載の力伝達機構であって、
シャッタベーン(121)が、前記枢動可能に支持される力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)から遠い側の端部のところで、前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)に配置される
力伝達機構。 - 請求項8に記載の力伝達機構であって、
前記シャッタベーン(121)は、開口部、特に、最短幅を有する開口スロットまたは長穴を有する
力伝達機構。 - 請求項9に記載の力伝達機構であって、
前記力伝達レバー(280,480,580,680,780,880,980,1080,1180)の前記支点ピボット(190,490,590,690,790,890,990,1090,1190)と、前記最短幅の中点と、の接続線は、前記最短幅に実質的に直交する
力伝達機構。 - 請求項1ないし請求項10のいずれか一項に記載の力伝達機構であって、
前記固定平行脚部(145,445,545,645,745,845,1145)、前記可動平行脚部(140,440,540,640,740,840,1140)および前記力伝達レバー(280,480,580,680,780,880,980,1080,1180)は、一体的で均質な材料ブロックから一部品に製造され、
撓みピボット(160,860,1160)が薄い材料のブリッジ形状に構成される
力伝達機構。 - 請求項11に記載の力伝達機構であって、
前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)および前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)の少なくとも一方は、前記2つの部分レバーアームの少なくとも一方が前記一体的で均質な材料ブロックの外部を延在し得るように構成される
力伝達機構。 - 請求項1ないし請求項12のいずれか一項に記載の力伝達機構(200,400,500,600,700,800,900,1000,1100)を備える、電磁力補償の原理に基づく力測定装置であって、
秤量負荷の重量力を受けるために、前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)と前記固定平行脚部(145,445,545,645,745,845,1145)との間に配置された測定トランスデューサ(110,310A,310B,410,510,610,710,1010)を備え、
前記測定トランスデューサは、
エアギャップ(115,315)を有し、前記固定平行脚部(145,445,545,645,745,845,1145)または前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)に配置された永久磁石システム(113,313A,313B)と、
前記永久磁石システム(113,313A,313B)にしたがって前記第1の部分レバーアーム(282A,482A,582A,682A,782A,882A,982A,1082A,1182A)または前記固定平行脚部(145,445,545,645,745,845,1145)に取り付けられ、前記永久磁石システム(113,313A,313B)の前記エアギャップ(115,315)内を移動可能であり、測定動作が行われているときに補償電流が流れるコイル(111,311)と
を備え、
前記力測定装置は、さらに、光電子式位置センサ(120,420,520,620,720,1020)を備え、
前記光電子式位置センサは、
光源と、
受光器と
を備え、
前記光源および前記受光器は、それらの間に自由空間を有する状態で前記固定平行脚部(145,445,545,645,745,845,1145)に配置され、
前記光電子式位置センサは、さらに、シャッタベーン(121)を備え、
前記シャッタベーン(121)は、前記第2の部分レバーアーム(282B,482B,582B,682B,782B,882B,982B,1082B,1182B)に配置され、前記コイル(111,311)の移動に関与し、前記発光体と前記受光器との間の前記自由空間を光ゲートの態様で横切る
力測定装置。 - 請求項13に記載の力測定装置を有する重量測定機器。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16156554.4 | 2016-02-19 | ||
| EP16156554.4A EP3208583B1 (de) | 2016-02-19 | 2016-02-19 | Kraftübertragungsvorrichtung mit separatem positionssensorhebelarm |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017198651A JP2017198651A (ja) | 2017-11-02 |
| JP6806581B2 true JP6806581B2 (ja) | 2021-01-06 |
Family
ID=55404648
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017016817A Active JP6806581B2 (ja) | 2016-02-19 | 2017-02-01 | 位置センサまで延在する分離型レバーアームを有する力伝達機構 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9958344B2 (ja) |
| EP (1) | EP3208583B1 (ja) |
| JP (1) | JP6806581B2 (ja) |
| CN (1) | CN107101709B (ja) |
| PL (1) | PL3208583T3 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016009098B4 (de) * | 2016-07-27 | 2018-06-14 | Fresenius Medical Care Deutschland Gmbh | Vorrichtung und Verfahren zur Prüfung eines Wägesystems eines Blutbehandlungsgerätes |
| CN109870218B (zh) * | 2017-12-04 | 2024-08-16 | 梅特勒-托利多仪器(上海)有限公司 | 称重传感器组件及包括其的电子天平 |
| WO2019155453A1 (en) | 2018-02-11 | 2019-08-15 | Avoset Health Ltd. | Flex-stroke infusion pump |
| CN108692669B (zh) * | 2018-03-26 | 2024-03-26 | 林和光 | 一种用于铁路轨道计轴的光纤光栅传感器 |
| US11191897B2 (en) | 2019-03-04 | 2021-12-07 | Eitan Medical Ltd. | In cycle pressure measurement |
| EP3934716A1 (en) | 2019-03-05 | 2022-01-12 | Eitan Medical Ltd. | Anti-free-flow valve |
| PL3708978T3 (pl) * | 2019-03-11 | 2023-09-18 | Mettler-Toledo Gmbh | Kompaktowy układ pomiarowy bezpośredni |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH591072A5 (ja) * | 1975-10-10 | 1977-08-31 | Mettler Instrumente Ag | |
| CH634654A5 (de) | 1978-10-20 | 1983-02-15 | Mettler Instrumente Ag | Waage mit elektromagnetischer lastkompensation. |
| DE3743073A1 (de) | 1986-12-24 | 1988-07-07 | Sartorius Gmbh | Elektromagnetisch kraftkompensierende waage mit optischem lagensensor |
| CH679074A5 (ja) * | 1988-09-16 | 1991-12-13 | Sartorius Gmbh | |
| DE3838906C1 (ja) | 1988-11-17 | 1990-05-23 | Sartorius Gmbh, 3400 Goettingen, De | |
| US4964478A (en) * | 1988-12-10 | 1990-10-23 | Sartorius Ag | Electronic balance with scale on top |
| DE4137919C1 (en) * | 1991-11-18 | 1993-02-11 | Sartorius Ag, 3400 Goettingen, De | Upper pan electronic scales - has angle probe to ascertain position of rotatable weighing pan |
| DE4204480C2 (de) | 1992-02-14 | 1998-05-28 | Mettler Toledo Albstadt Gmbh | Kraftmeßvorrichtung, insbesondere Waage |
| DE19621375A1 (de) * | 1996-05-28 | 1997-12-04 | Sartorius Gmbh | Elektronische Waage nach dem Prinzip der elektromagnetischen Kraftkompensation |
| DE19923207C1 (de) * | 1999-05-20 | 2000-10-12 | Sartorius Gmbh | Wägeaufnehmer |
| DE19943439A1 (de) | 1999-09-11 | 2001-03-15 | Mettler Toledo Gmbh | Vorrichtung zur Kraftuntersetzung in einer Kraftmeßvorrichtung |
| DE10326699B3 (de) | 2003-06-13 | 2005-01-13 | Sartorius Ag | Kompaktes Wägesystem |
| JP4952717B2 (ja) * | 2006-08-29 | 2012-06-13 | 株式会社島津製作所 | 電子天秤 |
| EP2336736B1 (de) * | 2009-12-21 | 2015-04-15 | Mettler-Toledo AG | Kraftübertragungsvorrichtung mit koppelbarem Kalibriergewicht |
| PL2533024T3 (pl) * | 2011-06-09 | 2014-08-29 | Mettler Toledo Gmbh | Urządzenie przenoszące siłę ze sprzęgalnym odważnikiem kalibracyjnym |
| PL2607866T3 (pl) | 2011-12-22 | 2015-05-29 | Mettler Toledo Gmbh | Ogniwo obciążnikowe według zasady elektromagnetycznej kompensacji siły z optoelektronicznym czujnikiem pozycji |
| EP2610596B2 (de) * | 2011-12-30 | 2022-03-30 | WIPOTEC GmbH | Brückenelement zur Ausbildung einer Waage |
| US9027380B2 (en) * | 2012-03-06 | 2015-05-12 | Mettler-Toledo Ag | Force-transmitting mechanism with a calibration weight that can be coupled and uncoupled |
| EP2690415B2 (de) * | 2012-07-23 | 2022-05-18 | Mettler-Toledo GmbH | Kraftmessvorrichtung mit Verschiebegewicht |
| EP2784454B1 (de) * | 2013-03-28 | 2017-02-01 | Mettler-Toledo GmbH | Wägezellendiagnostik |
| DE102013103791B4 (de) | 2013-04-16 | 2015-07-09 | Sartorius Lab Instruments Gmbh & Co. Kg | Monolithisches Wägesystem |
-
2016
- 2016-02-19 EP EP16156554.4A patent/EP3208583B1/de active Active
- 2016-02-19 PL PL16156554T patent/PL3208583T3/pl unknown
-
2017
- 2017-02-01 JP JP2017016817A patent/JP6806581B2/ja active Active
- 2017-02-02 US US15/423,107 patent/US9958344B2/en active Active
- 2017-02-20 CN CN201710089350.3A patent/CN107101709B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3208583A1 (de) | 2017-08-23 |
| US9958344B2 (en) | 2018-05-01 |
| CN107101709B (zh) | 2020-12-15 |
| CN107101709A (zh) | 2017-08-29 |
| US20170241846A1 (en) | 2017-08-24 |
| EP3208583B1 (de) | 2019-05-08 |
| JP2017198651A (ja) | 2017-11-02 |
| PL3208583T3 (pl) | 2020-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6806581B2 (ja) | 位置センサまで延在する分離型レバーアームを有する力伝達機構 | |
| JP3213378U (ja) | 光電子位置検知器を用いる磁力補償の原理に基づく計量セル | |
| JP6126336B2 (ja) | 結合および解放することができる校正錘を有する力伝達機構 | |
| JP5662128B2 (ja) | 結合および結合解除可能な校正用錘を備えた力伝達装置 | |
| JP6588086B2 (ja) | 浮遊秤量パンを有する秤 | |
| US7228642B2 (en) | Probe for a coordinate measuring machine | |
| JP2013134252A (ja) | 光電位置センサを備え電磁力補正原理に基づいた秤量セル | |
| US20130233045A1 (en) | Force-transmitting mechanism with a calibration weight that can be coupled and uncoupled | |
| JP2006162302A (ja) | 電子天びん | |
| JPS63169522A (ja) | 光学的位置センサを備えた電磁的力の補償形秤 | |
| JP5118447B2 (ja) | 電磁的な力補正直接作動装置 | |
| JP2637230B2 (ja) | 電子秤 | |
| JP3188784B2 (ja) | 負荷測定装置特に重量計 | |
| US4625819A (en) | Vertically stable friction-free microbalance | |
| JP2012068250A (ja) | 秤量装置、特に電磁力補償の原理で作動する秤量装置 | |
| JPS63277936A (ja) | 電子天びん | |
| CN111090083B (zh) | 一种扫描振镜和激光雷达 | |
| JP2002148105A (ja) | 電子天びん | |
| JP3588941B2 (ja) | 電子天びん | |
| CN116719145B (zh) | 一种二维非框架大角度快速反射镜 | |
| CN211603548U (zh) | 一种双轴振镜和激光雷达 | |
| JP4006853B2 (ja) | 天びん | |
| JP5097510B2 (ja) | 力測定機構 | |
| JP2002107213A (ja) | 電子天秤 | |
| CN103323089A (zh) | 具有可联接和分开的校准配重的力传递机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200918 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6806581 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |