以下に添付図面を参照して、本発明に係る俯瞰映像生成装置40、俯瞰映像生成システム1、俯瞰映像生成方法およびプログラムの実施形態を詳細に説明する。なお、以下の実施形態により本発明が限定されるものではない。
以下の説明においては、前後方向とは、車両直進時の進行方向と平行な方向であり、運転席からウインドシールドに向かう側を前後方向の「前」、ウインドシールドから運転席に向かう側を前後方向の「後」とする。前後方向を、X軸方向とする。左右方向とは、前後方向に対して水平に直交する方向である。ウインドシールドへ向かって、左手側が「左」、右手側が「右」である。左右方向を、Y軸方向とする。上下方向とは、前後方向および左右方向に対して直交する方向である。上下方向を、Z軸方向とする。したがって、前後方向、左右方向および鉛直方向は、3次元で直交する。以下の説明における前後、左右、上下は、俯瞰映像生成システム1を車両に搭載した状態での前後、左右、上下である。
[第一実施形態]
図1は、第一実施形態に係る俯瞰映像生成システムの構成例を示すブロック図である。俯瞰映像生成システム1は、車両Vに搭載されている。俯瞰映像生成システム1は、車両Vに載置されているものに加えて、可搬型で車両Vにおいて利用可能な装置であってもよい。
図1を用いて、俯瞰映像生成システム1について説明する。俯瞰映像生成システム1は、前方カメラ11と、後方カメラ12と、左側方カメラ13と、右側方カメラ14と、センサ群(障害物センサ)20と、表示パネル(表示部)30と、俯瞰映像生成装置40とを有する。
図2を用いて、前方カメラ11と後方カメラ12と左側方カメラ13と右側方カメラ14とについて説明する。図2は、第一実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。前方カメラ11は、車両Vの前方に配置され、車両Vの前方を中心とした周辺を撮影する。前方カメラ11は、例えば、180°程度の撮影範囲A1を撮影する。前方カメラ11は、撮影した映像を俯瞰映像生成装置40の映像データ取得部42へ出力する。
後方カメラ12は、車両Vの後方に配置され、車両Vの後方を中心とした周辺を撮影する。後方カメラ12は、例えば、180°程度の撮影範囲A2を撮影する。後方カメラ12は、撮影した映像を俯瞰映像生成装置40の映像データ取得部42へ出力する。
左側方カメラ13は、車両Vの左側方に配置され、車両Vの左側方を中心とした周辺を撮影する。左側方カメラ13は、例えば、180°程度の撮影範囲A3を撮影する。左側方カメラ13は、撮影した映像を俯瞰映像生成装置40の映像データ取得部42へ出力する。
右側方カメラ14は、車両Vの右側方に配置され、車両Vの右側方を中心とした周辺を撮影する。右側方カメラ14は、例えば、180°程度の図示しない撮影範囲A4を撮影する。右側方カメラ14は、撮影した映像を俯瞰映像生成装置40の映像データ取得部42へ出力する。
このような前方カメラ11と後方カメラ12と左側方カメラ13と右側方カメラ14とで、車両Vの全方位を撮影する。
図1に戻って、センサ群20は、車両Vの周辺の障害物Qを検出する検出部である。センサ群20は、俯瞰映像の表示範囲Aを含む範囲の障害物Qを検出可能である。本実施形態では、センサ群20は、前方センサと、後方センサと、左側方センサと、右側方センサとを含む。センサ群20は、センシング方式によっては数十mから数百mの距離までのセンシングが可能であるが、本目的に用いる場合は車両Vから5m程度までの距離の障害物Qを検出する。センサ群20は、例えば、赤外線センサ、超音波センサ、ミリ波センサ、画像認識によるセンサ等、複数方式のセンサの組合せなど様々な方式が適用可能である。
前方センサは、車両Vの前方に配置され、車両Vの前方を中心とした範囲に存在する障害物Qを検出する。前方センサは、車両Vが前進しているときに車両Vと接触するおそれがある、地上から高さを有するものを検出する。前方センサは、例えば、車両Vから5m程度までの距離の障害物Qを検出する。前方センサの検出範囲は、前方カメラ11の撮影範囲A1と重複する。前方センサの検出範囲は、左側方センサおよび右側方センサの検出範囲の一部と重複していてもよい。前方センサは、複数のセンサの組み合わせで構成されている。これにより、障害物Qの方向を細分化して検出する。前方センサは、検出した障害物Qの障害物情報を俯瞰映像生成装置40の障害物情報取得部43へ出力する。
後方センサは、車両Vの後方に配置され、車両Vの後方を中心とした範囲に存在する障害物Qを検出する。後方センサは、車両Vが後退しているときに車両Vと接触するおそれがある、地上から高さを有するものを検出する。後方センサは、例えば、車両Vから5m程度までの距離の障害物Qを検出する。後方センサの検出範囲は、後方カメラ12の撮影範囲A2と重複する。後方センサの検出範囲は、左側方センサおよび右側方センサの検出範囲の一部と重複していてもよい。後方センサは、複数のセンサの組み合わせで構成されている。これにより、障害物Qの方向を細分化して検出する。後方センサは、検出した障害物Qの障害物情報を俯瞰映像生成装置40の障害物情報取得部43へ出力する。
左側方センサは、車両Vの左側方に配置され、車両Vの左側方を中心とした範囲に存在する障害物Qを検出する。左側方センサは、車両Vが操舵しながら前進または後退しているときに車両Vと接触するおそれがある、地上から高さを有するものを検出する。左側方センサは、例えば、車両Vから5m程度までの距離の障害物Qを検出する。左側方センサの検出範囲は、左側方カメラ13の撮影範囲A3と重複する。左側方センサの検出範囲は、前方センサおよび後方センサの検出範囲の一部と重複していてもよい。左側方センサは、複数のセンサの組み合わせで構成されている。これにより、障害物Qの方向を細分化して検出する。左側方センサは、検出した障害物Qの障害物情報を俯瞰映像生成装置40の障害物情報取得部43へ出力する。
右側方センサは、車両Vの右側方に配置され、車両Vの右側方を中心とした範囲に存在する障害物Qを検出する。右側方センサは、車両Vが操舵しながら前進または後退しているときに車両Vと接触するおそれがある、地上から高さを有するものを検出する。右側方センサは、例えば、車両Vから5m程度までの距離の障害物Qを検出する。右側方センサの検出範囲は、右側方カメラ14の撮影範囲A4と重複する。右側方センサの検出範囲は、前方センサおよび後方センサの検出範囲の一部と重複していてもよい。右側方センサは、複数のセンサの組み合わせで構成されている。これにより、障害物Qの方向を細分化して検出する。右側方センサは、検出した障害物Qの障害物情報を俯瞰映像生成装置40の障害物情報取得部43へ出力する。
表示パネル30は、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)または有機EL(Organic Electro−Luminescence)ディスプレイを含むディスプレイである。表示パネル30は、俯瞰映像生成システム1の俯瞰映像生成装置40から出力された映像信号に基づいて、俯瞰映像100(図3参照)を表示する。表示パネル30は、俯瞰映像生成システム1に専用のものであっても、例えば、ナビゲーションシステムを含む他のシステムと共同で使用するものであってもよい。表示パネル30は、運転者から視認容易な位置に配置されている。
表示パネル30は、表示パネル30の形状が横長の矩形である場合、複数の表示範囲に分割されていてもよい。例えば、表示パネル30は、俯瞰映像100を表示する表示範囲と、俯瞰映像100の表示範囲の側方に配置された、ナビゲーション画面やオーディオ画面を表示する表示範囲とを有する。俯瞰映像100を表示する表示範囲は、縦長の矩形状である。
俯瞰映像生成装置40は、制御部41と、記憶部49とを有する。
制御部41は、例えば、CPU(Central Processing Unit)などで構成された演算処理装置である。制御部41は、記憶部49に記憶されているプログラムをメモリにロードして、プログラムに含まれる命令を実行する。制御部41は、映像データ取得部42と、障害物情報取得部43と、車両情報取得部44と、俯瞰映像生成部45と、表示制御部48とを有する。
映像データ取得部42は、車両Vの周辺を撮影した周辺映像データを取得する。より詳しくは、映像データ取得部42は、前方カメラ11と後方カメラ12と左側方カメラ13と右側方カメラ14とが出力した周辺映像データを取得する。映像データ取得部42は、取得した周辺映像データを俯瞰映像生成部45に出力する。
障害物情報取得部43は、車両Vの周辺において検出した障害物Qの障害物情報を取得し、検出した障害物Qの俯瞰映像上の位置を特定する。より詳しくは、障害物情報取得部43は、センサ群20が出力した障害物情報を取得する。障害物情報取得部43は、障害物情報を出力したセンサの取付位置と当該センサによる障害物Qの検出範囲とに基づいて、障害物Qの方向を細分化して取得する。障害物情報取得部43は、検出した障害物Qまでの距離を含む障害物情報を取得する。障害物情報取得部43は、取得した障害物Qの方向と距離とに基づいて、障害物Qの俯瞰映像上の位置を特定する。
車両情報取得部44は、車両Vのギア操作情報など、俯瞰映像100を表示させるためのトリガとなる車両情報を、CAN(Controller Area Network)や車両Vの状態をセンシングする各種センサなどから取得する。本実施形態では、車両情報は、車両Vの進行方向を示す情報を含む。車両情報取得部44は、取得した車両情報を俯瞰映像生成部45に出力する。
俯瞰映像生成部45は、映像データ取得部42が取得した周辺映像データに視点変換処理を行い合成することで、車両Vの上方を仮想視点Pとした俯瞰映像100を生成する。
図2を用いて、仮想視点Pについて説明する。仮想視点Pは、車両Vの中央の上方に位置している。仮想視点Pは、車両Vの中央の真上から見下すような視点である。車両Vの中央とは、車両Vの車幅方向の中央、かつ、前後方向の中央である。車両Vの真上とは、車両Vの基準面の垂線上の位置である。基準面とは、車両Vが水平かつ平坦な路面上に位置しているときに路面と水平な平面である。仮想視点Pの位置を、(x,y,z)とする。
図3を用いて、生成された俯瞰映像100について説明する。図3は、第一実施形態に係る俯瞰映像生成システムで生成した俯瞰映像の一例を示す図である。俯瞰映像100は、表示範囲Aの周辺映像を、仮想視点Pとして視点変換処理をした映像を合成して表示する。俯瞰映像100は、前方映像101と後方映像102と左側方映像103と右側方映像104とを含む。前方映像101の表示面積と後方映像102の表示面積とは同じ広さである。左側方映像103の表示面積と右側方映像104の表示面積とは同じ広さである。俯瞰映像100の中央部は、車両Vを示す自車両アイコン200が表示されている。自車両アイコン200は、車両Vを真上から見下した形態を示す。
図3においては、前方映像101と左側方映像103との合成境界B1と、前方映像101と右側方映像104との合成境界B2と、後方映像102と左側方映像103との合成境界B3と、後方映像102と右側方映像104との合成境界B4とを示す斜めの破線を説明のために図示しているが、実際に表示パネル30に表示される俯瞰映像100には当該破線は表示されても表示されなくてもよい。他の図も同様である。以下の説明において、合成境界B1と合成境界B2と合成境界B3と合成境界B4とを特に区別する必要がないときは、合成境界Bとして説明する。
俯瞰映像生成部45は、障害物情報取得部43が取得した障害物Qの位置情報に基づいて、所定条件を満たす障害物が存在するとき、映像データ取得部42が取得した周辺映像を、車両Vおよび障害物Qが俯瞰できるように、車両Vの真上に位置する仮想視点Pから、車幅方向または前後方向の少なくともいずれかに離間して仮想視点PAが位置するように視点変換処理を行って合成した俯瞰映像を生成する。
所定条件とは、障害物Qとして検出する条件である。本実施形態では、所定条件は、障害物Qが車両Vの進行方向に位置すること、である。障害物Qが車両Vの進行方向に位置する場合、所定条件を満たすと判定し、障害物Qとして検出する。例えば、車両Vが後退しているとき、障害物Qが車両Vの前端より後方に位置する場合、所定条件を満たすと判定し、障害物Qとして検出する。より詳しくは、制御部41は、車両Vが後退しているとき、センサ群20のうち、車両Vの前端より後方の障害物Qを検出するセンサが障害物Qを検出した場合、所定条件を満たすと判定し、障害物Qとして検出する。本実施形態では、車両Vが後退している場合について説明する。
俯瞰映像生成部45は、視点変換処理部451と、切出処理部452と、合成処理部453とを有する。
視点変換処理部451は、映像データ取得部42で取得した周辺映像データに対して、車両Vを上方の仮想視点Pから見下ろすように視点変換処理を行う。より詳しくは、視点変換処理部451は、前方カメラ11と後方カメラ12と左側方カメラ13と右側方カメラ14とで撮影した周辺映像データに基づいて、視点変換処理を行った映像を生成する。視点変換処理の方法は、公知のいずれの方法でもよく、限定されない。視点変換処理部451は、視点変換処理を行った周辺映像データを切出処理部452に出力する。
視点変換処理部451は、障害物情報取得部43が取得した障害物Qの位置情報に基づいて、所定条件を満たす障害物Qが存在するとき、車両Vおよび障害物Qが俯瞰できるように、車両Vの真上に位置する仮想視点Pから、車幅方向または前後方向の少なくともいずれかに離間して仮想視点PAが位置するように視点変換処理を行って映像を生成する。より詳しくは、視点変換処理部451は、車両Vの進行方向に位置する障害物Qが存在するとき、車両Vおよび障害物Qの相対的な位置関係が認識できるように、仮想視点の位置を仮想視点Pから離間した仮想視点PAとして視点変換処理をした映像を生成する。視点変換処理部451は、視点変換処理を行った周辺映像データを切出処理部452に出力する。
車両Vおよび障害物Qの相対的な位置関係を認識できるとは、俯瞰映像において、車両Vと障害物Qとが重なることなく表されていることをいう。さらに、車両Vおよび障害物Qの相対的な位置関係を認識できるとは、車両Vまたは障害物Qが移動するときに、車両Vと障害物Qとの相対的な距離の変化に応じて、俯瞰映像における車両Vと障害物Qとの相対的な位置関係が変化することをいう。
仮想視点PAは、障害物が検出された方向における俯瞰映像の画角が、仮想視点Pの俯瞰映像100の画角と同程度になる位置とすることが好ましい。仮想視点Pの俯瞰映像100と仮想視点を仮想視点PAに移動した俯瞰映像とは、用いる映像は同一であるが、仮想視点の位置に対応して適切な仮想投影面における領域を俯瞰映像に用いる。このため、障害物が検出された方向における俯瞰映像の画角の変化が大きい場合、仮想視点位置が変更されたときに、俯瞰映像上の障害物の位置を把握しやすい。具体的には、仮想視点PAを車両Vの後方とした場合、仮想視点PAが位置する方向である後方映像は仮想視点Pとした後方映像102の切出画角と同程度とし、仮想視点PAとは車両Vを挟んで反対方向である前方映像は仮想視点Pとした前方映像101より車両前方に広い切出画角とする。このようにすることで、仮想視点PAから見下ろしたような俯瞰映像を生成することができる。
仮想視点Pから車幅方向または前後方向に離間した仮想視点PAの位置は、図4、図5に示すような、車両Vを中心とした曲面に位置する。図4は、第一実施形態に係る俯瞰映像生成システムにおける仮想視点の位置を説明する概略図である。図5は、第一実施形態に係る俯瞰映像生成システムにおける仮想視点の位置を説明する概略図である。このような曲面上を仮想視点PAとした俯瞰映像の画角は、仮想視点Pとした俯瞰映像100の画角と変わらないので、俯瞰映像に表示される障害物Qの大きさが変わらない。このため、仮想視点の位置が変更されても、障害物Qと車両Vとの相対的な位置関係を直感的に把握しやすい俯瞰映像が生成される。
仮想視点PAは、車両Vの中央と障害物Qとの距離より車両Vの中央から離れた位置とすることが好ましい。これにより、障害物Qと車両Vとの相対的な位置関係が認識しやすい俯瞰映像が生成される。
本実施形態では、図6、図7に示すように、視点変換処理部451は、車両Vの左後方に位置する障害物Qが検出されたとき、仮想視点Pに対して左後方の仮想視点PA1として視点変換処理を行った映像を生成する。図6は、第一実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。図7は、第一実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。仮想視点PA1の位置は、(xA1,yA1,zA1)で表される。
仮想視点PA1について説明する。本実施形態では、仮想視点PA1は、車両Vの左後方に位置している。仮想視点PA1は、Z軸方向視において、障害物Qより左前方に位置している。仮想視点PA1は、Z軸方向視において、仮想視点Pより左後方に位置している。仮想視点PA1は、車両Vの中央と障害物Qとの距離より車両Vの中央から離れている。仮想視点PA1は、車両Vを左後方から斜めに見下すような視点である。
切出処理部452は、視点変換処理を行った周辺映像データから所定の範囲の映像を切出す切出処理を行う。切出処理部452は、視点変換処理を行った前方カメラ11からの周辺映像データから、前方切出範囲を切出す。切出処理部452は、視点変換処理を行った後方カメラ12からの周辺映像データから、後方切出範囲を切出す。切出処理部452は、視点変換処理を行った左側方カメラ13からの周辺映像データから、左側方切出範囲を切出す。切出処理部452は、視点変換処理を行った右側方カメラ14からの周辺映像データから、右側方切出範囲を切出す。切出処理部452は、切出処理を行った映像の映像データを合成処理部453に出力する。
前方切出範囲は、視点変換処理を行った周辺映像データから前方映像101を切出す範囲である。前方切出範囲は、車両Vの前端部から前方の範囲である。後方切出範囲は、視点変換処理を行った周辺映像データから後方映像102を切出す範囲である。後方切出範囲は、車両Vの後端部から後方の範囲である。左側方切出範囲は、視点変換処理を行った周辺映像データから左側方映像103を切出す範囲である。左側方切出範囲は、車両Vの左側部から左方の範囲である。右側方切出範囲は、視点変換処理を行った周辺映像データから右側方映像104を切出す範囲である。右側方切出範囲は、車両Vの右側部から右方の範囲である。
合成処理部453は、切出処理部452で切出した複数の映像を合成し俯瞰映像を生成する。合成処理部453は、生成した俯瞰映像を表示制御部48に出力する。
合成処理部453は、視点変換処理を行った映像を合成する場合、合成した俯瞰映像の中央部に、仮想視点から見た自車両の形態を模した自車両アイコンを合成する。仮想視点位置を車両Vの真上から見下した場合の仮想視点Pとした場合の自車両アイコンは、図3に示す自車両アイコン200のように自車両を真上から見たような形態である。これに対して仮想視点位置を仮想視点Pから離間した位置に設定した場合は、自車両を仮想視点から斜めに見下した形態とすることが好ましい。このような形態とした場合、仮想視点から自車両を挟んで反対側の俯瞰映像は自車両に近い範囲が自車両アイコンの陰となる表示とすることが自然な表示となる。このような場合であっても、自車両アイコンは、自車両アイコンによる死角が生じないような表示形態とすることが好ましい。例えば、自車両アイコンは、半透過としてもよい。例えば、自車両アイコンは、外形を示す枠状としてもよい。
図1に戻って、表示制御部48は、俯瞰映像を表示パネル30に表示させる。
記憶部49は、俯瞰映像生成装置40における各種処理に要するデータおよび各種処理結果を記憶する。記憶部49は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、または、ハードディスク、光ディスクなどの記憶装置である。
次に、図8を用いて、俯瞰映像生成システム1の俯瞰映像生成装置40における処理の流れについて説明する。図8は、第一実施形態に係る俯瞰映像生成システムにおける処理の流れを示すフローチャートである。
俯瞰映像生成システム1が起動されると、制御部41は、映像データ取得部42で周辺映像データを取得させる。制御部41は、障害物情報取得部43で障害物情報を取得させる。
制御部41は、俯瞰映像表示を開始するか否かを判定する(ステップS11)。本実施形態では、制御部41は、後退トリガの有無に基づいて、俯瞰映像表示を開始するか否かを判定する。後退トリガとは、例えば、シフトポジションが「リバース」とされたことをいう。または、後退トリガとは、車両Vの進行方向が車両Vの後方となったことをいう。制御部41は、後退トリガがない場合、俯瞰映像表示を開始しないと判定し(ステップS11でNo)、ステップS11の処理を再度実行する。制御部41は、後退トリガがある場合、俯瞰映像表示を開始すると判定し(ステップS11でYes)、ステップS12に進む。俯瞰映像表示を開始させるトリガは、後退トリガに限らず、ユーザ操作、障害物検出結果、停止時など任意のトリガが適用される。
制御部41は、障害物Qを検出したか否かを判定する(ステップS12)。より詳しくは、制御部41は、障害物情報取得部43で所定条件を満たす障害物Qの障害物情報が取得したか否かを判定する。制御部41は、所定条件を満たす障害物Qの障害物情報が取得されたと判定した場合(ステップS12でYes)、ステップS13に進む。制御部41は、所定条件を満たす障害物Qの障害物情報が取得されていないと判定した場合(ステップS12でNo)、ステップS17に進む。
制御部41は、車両Vに対する障害物Qの位置情報を取得する(ステップS13)。より詳しくは、制御部41は、障害物情報取得部43で、取得した障害物情報に基づいて、障害物Qの俯瞰映像上の位置を取得させる。制御部41は、ステップS14に進む。
制御部41は、障害物Qは俯瞰映像の表示範囲A内に位置しているか否かを判定する(ステップS14)。より詳しくは、制御部41は、ステップS13で取得した障害物Qの位置情報に基づいて、障害物Qが俯瞰映像の表示範囲A内であるか否かを判定する。制御部41は、障害物Qが俯瞰映像の表示範囲A内であると判定した場合(ステップS14でYes)、ステップS16に進む。制御部41は、障害物Qが俯瞰映像の表示範囲A内ではないと判定した場合(ステップS14でNo)、ステップS15に進む。
制御部41は、俯瞰映像100を生成し表示する(ステップS15)。より詳しくは、制御部41は、俯瞰映像生成部45で、映像データ取得部42で取得した周辺映像データから車両Vを仮想視点Pで上方から見下ろすように視点変換処理を行い俯瞰映像100を生成させ、表示パネル30に表示させる。制御部41は、ステップS13に進む。
制御部41は、仮想視点位置を変更する(ステップS16)。より詳しくは、制御部41は、俯瞰映像生成部45で、俯瞰映像100の仮想視点Pの位置を変更して仮想視点PAとした俯瞰映像を生成させ、表示パネル30に表示させる。制御部41は、ステップS18に進む。
本実施形態では、制御部41は、俯瞰映像生成部45で、仮想視点Pに対して左後方の仮想視点PA1として視点変換処理を行った映像を生成させ、表示パネル30に表示させる。
制御部41は、俯瞰映像100を生成し表示する(ステップS17)。制御部41は、ステップS15と同様の処理を行う。
制御部41は、俯瞰映像表示を終了するか否かを判定する(ステップS18)。より詳しくは、制御部41は、後退終了トリガの有無に基づいて、俯瞰映像表示を終了するか否かを判定する。後退終了トリガとは、例えば、シフトポジションが「リバース」から他のポジションとなったことをいう。制御部41は、後退終了トリガがある場合、俯瞰映像表示を終了すると判定し(ステップS18でYes)、処理を終了する。制御部41は、後退終了トリガがない場合、俯瞰映像表示を終了しないと判定し(ステップS18でNo)、ステップS12に戻って処理を継続する。
このようにして、俯瞰映像生成システム1は、障害物Qが進行方向に検出された場合、仮想視点の位置を車両Vの真上に位置する仮想視点Pから離間した仮想視点PAに変更した俯瞰映像を生成する。
上述したように、本実施形態は、障害物Qが進行方向に検出された場合、仮想視点の位置を仮想視点PAに変更した俯瞰映像を生成する。これにより、本実施形態は、障害物Qが進行方向に検出された場合、仮想視点の位置をずらして、障害物Qと車両Vの相対的な位置関係が表わされた俯瞰映像を表示することができる。本実施形態によれば、障害物Qが車両Vに接触するか否かを俯瞰映像によって直感的に認識することができる。このように、本実施形態は、俯瞰映像において障害物Qを適切に表示することができる。本実施形態は、俯瞰映像における障害物Qの視認性を向上することができる。本実施形態は、車両周辺の障害物Qを適切に確認可能に表示することができる。
本実施形態では、例えば、障害物Qが検出された位置の近くに立って、障害物Qと車両Vとの双方を確認しながら近づく車両Vを誘導するような仮想視点PAとした俯瞰映像を表示することができる。これにより、車両Vの真上に位置する仮想視点Pとした俯瞰映像100に比べて、障害物Qが車両Vに接触するか否かを俯瞰映像によって容易に認識することができる。
本実施形態によれば、生成される俯瞰映像の画角が、仮想視点Pの俯瞰映像100の画角と同程度になる位置を仮想視点PAとしている。これにより、仮想視点PAとした俯瞰映像に表示される障害物Qの大きさが、俯瞰映像100に表示された障害物Qの大きさと変わらない。本実施形態によれば、仮想視点の位置が変更されても、障害物Qと車両Vとの相対的な距離を認識しやすい俯瞰映像を生成することができる。
[第二実施形態]
図9を参照しながら、本実施形態に係る俯瞰映像生成システム1について説明する。図9は、第二実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。俯瞰映像生成システム1は、基本的な構成は第一実施形態の俯瞰映像生成システム1と同様である。以下の説明においては、俯瞰映像生成システム1と同様の構成要素には、同一の符号または対応する符号を付し、その詳細な説明は省略する。本実施形態の俯瞰映像生成システム1は、俯瞰映像生成部45の視点変換処理部451における処理が、第一実施形態の俯瞰映像生成システム1と異なる。
視点変換処理部451は、障害物情報取得部43が取得した障害物Qの位置が車両Vの進行方向に位置するとき、車両Vの中央から障害物Qへの延長線L11に直交する直線L12上に基づいて位置決めされた仮想視点PBとして視点変換処理を行った映像を生成する。本実施形態では、視点変換処理部451は、障害物Qの位置が車両Vの進行方向に位置するとき、車両Vの中央から障害物Qへの延長線L11に直交する直線L12上に位置する仮想視点PBとして視点変換処理を行った映像を生成する。
本実施形態では、視点変換処理部451は、後方に位置する障害物Qが検出されたとき、仮想視点Pに対して左前方の仮想視点PBとして視点変換処理を行った映像を生成する。仮想視点PBの位置は、(xB,yB,zB)で表される。
仮想視点PBについて説明する。本実施形態では、仮想視点PBは、車両Vの左前方に位置している。仮想視点PBは、Z軸方向視において、障害物Qより左前方に位置している。仮想視点PBは、Z軸方向視において、仮想視点Pより左前方に位置している。仮想視点PBは、車両Vの中央と障害物Qとの距離より車両Vの中央から離れている。仮想視点PBは、車両Vを左前方から斜めに見下すような視点である。
次に、俯瞰映像生成システム1の俯瞰映像生成装置40における処理の流れについて説明する。俯瞰映像生成装置40は、図8に示すフローチャートに沿った処理を行う。本実施形態は、ステップS16における処理が第一実施形態と異なり、ステップS11〜ステップS15、ステップS17、ステップS18の処理は第一実施形態と同様の処理を行う。
制御部41は、仮想視点位置を変更する(ステップS16)。より詳しくは、制御部41は、俯瞰映像生成部45で、車両Vから障害物Qへの延長線L11に直交する直線L12上に位置する仮想視点PBとして俯瞰映像を生成させ、表示パネル30に表示させる。制御部41は、ステップS18に進む。
上述したように、本実施形態は、進行方向の障害物Qが検出された場合、車両Vの中央から障害物Qへの延長線L11に直交する直線L12上に位置する仮想視点PBの俯瞰映像を生成する。本実施形態は、進行方向の障害物Qが検出された場合、仮想視点の位置をずらして、障害物Qと車両Vの相対的な位置関係が表わされた俯瞰映像を表示することができる。本実施形態によれば、障害物Qが車両Vに接触するか否かを俯瞰映像によって直感的に認識することができる。このように、本実施形態は、俯瞰映像において障害物Qを適切に表示することができる。本実施形態は、俯瞰映像における障害物Qの視認性を向上することができる。本実施形態は、車両周辺の障害物Qを適切に確認可能に表示することができる。また、本実施形態は、仮想視点PBの位置を、車両Vの中央から障害物Qへの延長線L11に直交する直線L12上に位置するように設定したため、仮想視点PBの位置が適切に車両Vおよび障害物Qとを確認できる位置とすることができる。
本実施形態では、例えば、障害物Qが検出された側に立って、障害物Qと車両Vとの双方を確認しながら遠ざかる車両Vを誘導するような仮想視点PBとした俯瞰映像を表示することができる。これにより、車両Vの真上に位置する仮想視点Pとした俯瞰映像100に比べて、障害物Qが車両Vに接触するか否かを俯瞰映像によって容易に認識することができる。
[第三実施形態]
図10ないし図13を参照しながら、本実施形態に係る俯瞰映像生成システム1について説明する。図10は、第三実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。図11は、第三実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の他の例を説明する概略図である。図12は、第三実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の他の例を説明する概略図である。図13は、第三実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の他の例を説明する概略図である。本実施形態の俯瞰映像生成システム1は、俯瞰映像生成部45の視点変換処理部451における処理が、第一実施形態の俯瞰映像生成システム1と異なる。本実施形態は、障害物Q1と障害物Q2が存在する。
視点変換処理部451は、障害物情報取得部43が取得した複数の障害物Qの位置情報に基づいて、映像データ取得部42が取得した周辺映像を、車両Vおよび複数の障害物Qが俯瞰できるように車両Vの真上に位置する仮想視点Pから離間した仮想視点が位置するように視点変換処理を行った映像を生成する。
本実施形態では、図10に示すように、視点変換処理部451は、車両Vの左後方に位置する複数の障害物Qが検出されたとき、仮想視点Pに対して左側方の仮想視点PC1として視点変換処理を行った映像を生成する。仮想視点PC1の位置は、(xC1,yC1,zC1)で表される。
仮想視点PC1について説明する。本実施形態では、仮想視点PC1は、車両Vの左側方に位置している。仮想視点PC1は、Z軸方向視において、障害物Q1、障害物Q2より左前方に位置している。仮想視点PA1は、Z軸方向視において、仮想視点Pより左側方に位置している。仮想視点PC1は、車両Vの中央と障害物Q1との距離、および、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PC1は、車両Vを左側方から斜めに見下すような視点である。
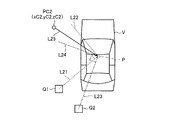
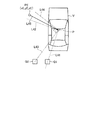
または、図11に示すように、視点変換処理部451は、車両Vの左後方に位置する障害物Q1、障害物Q2が検出されたとき、車両Vの中央から障害物Q1への延長線L21に直交する直線L22と、車両Vの中央から障害物Q2への延長線L23に直交する直線L24との二等分線L25上に位置する仮想視点PC2として俯瞰映像を生成してもよい。仮想視点PC2の位置は、(xC2,yC2,zC2)で表される。
仮想視点PC2について説明する。本実施形態では、仮想視点PC2は、車両Vの左前方に位置している。仮想視点PC2は、Z軸方向視において、障害物Q1、障害物Q2より左前方に位置している。仮想視点PC2は、Z軸方向視において、仮想視点Pより左前方に位置している。仮想視点PC2は、車両Vの中央と障害物Q1との距離、および、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PC2は、車両Vを左前方から斜めに見下すような視点である。
または、図12に示すように、視点変換処理部451は、車両Vの右側方に位置する障害物Q1と、車両Vの左後方に位置する障害物Q2が検出されたとき、仮想視点Pに対して右後方の仮想視点PC3として視点変換処理を行った映像を生成してもよい。仮想視点PC3は、車両Vの中央と障害物Q1を結んだ線分および車両Vの中央と障害物Q2を結んだ線分との二等分線上に存在する。仮想視点PC3の位置は、(xC3,yC3,zC3)で表される。
仮想視点PC3について説明する。本実施形態では、仮想視点PC3は、車両Vの右後方に位置している。仮想視点PC3は、Z軸方向視において、障害物Q1より左後方、障害物Q2より右後方に位置している。仮想視点PC3は、Z軸方向視において、仮想視点Pより右後方に位置している。仮想視点PC3は、車両Vの中央と障害物Q1との距離、および、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PC3は、車両Vを右後方から斜めに見下すような視点である。
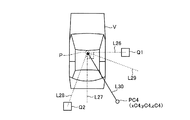
または、図13に示すように、視点変換処理部451は、車両Vの右側方に位置する障害物Q1と、車両Vの左後方に位置する障害物Q2が検出されたとき、車両Vの中央から障害物Q1への延長線L26に直交する直線L27と、車両Vの中央から障害物Q2への延長線L28に直交する直線L29との間の角度の二等分線L30上に位置する仮想視点PC4として俯瞰映像を生成してもよい。仮想視点PC4の位置は、(xC4,yC4,zC4)で表される。
仮想視点PC4について説明する。本実施形態では、仮想視点PC4は、車両Vの右後方に位置している。仮想視点PC4は、Z軸方向視において、障害物Q1より左後方、障害物Q2より右前方に位置している。仮想視点PC4は、Z軸方向視において、仮想視点Pより右後方に位置している。仮想視点PC4は、車両Vの中央と障害物Q1との距離、および、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PC4は、車両Vを右後方から斜めに見下すような視点である。
以下の説明において、仮想視点PC1と仮想視点PC2と仮想視点PC3と仮想視点PC4とを特に区別する必要がないときは、仮想視点PCとして説明する。
次に、俯瞰映像生成システム1の俯瞰映像生成装置40における処理の流れについて説明する。俯瞰映像生成装置40は、図8に示すフローチャートに沿った処理を行う。本実施形態は、ステップS16における処理が第一実施形態と異なり、ステップS11〜ステップS15、ステップS17、ステップS18の処理は第一実施形態と同様の処理を行う。
制御部41は、仮想視点位置を変更する(ステップS16)。より詳しくは、制御部41は、俯瞰映像生成部45で、車両Vおよび複数の障害物Qが俯瞰できるように車両Vの真上に位置する仮想視点Pから離間した仮想視点PCとした俯瞰映像を生成させ、表示パネル30に表示させる。制御部41は、ステップS18に進む。
上述したように、本実施形態は、進行方向の複数の障害物Qが検出された場合、車両Vおよび複数の障害物Qが俯瞰できるように車両Vの真上に位置する仮想視点Pから離間した仮想視点PCの俯瞰映像を生成する。本実施形態は、進行方向の複数の障害物Qが検出された場合、仮想視点の位置をずらして、複数の障害物Qが重ならず、複数の障害物Qと車両Vの相対的な位置関係が表わされた俯瞰映像を表示することができる。本実施形態によれば、複数の障害物Qが車両Vに接触するか否かを俯瞰映像によって直感的に認識することができる。このように、本実施形態は、俯瞰映像において複数の障害物Qを適切に表示することができる。本実施形態は、俯瞰映像における複数の障害物Qの視認性を向上することができる。本実施形態は、車両周辺の複数の障害物Qを適切に確認可能に表示することができる。
本実施形態では、例えば、複数の障害物Qを視認できる位置に立って、複数の障害物Qと車両Vとの双方を確認しながら近づく車両Vを誘導するような仮想視点PCとした俯瞰映像を表示することができる。これにより、車両Vの真上に位置する仮想視点Pとした俯瞰映像100に比べて、複数の障害物Qが車両Vに接触するか否かを俯瞰映像によって容易に認識することができる。
[第四実施形態]
図14を参照しながら、本実施形態に係る俯瞰映像生成システム1について説明する。図14は、第四実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。本実施形態の俯瞰映像生成システム1は、俯瞰映像生成部45における処理が、第一実施形態の俯瞰映像生成システム1と異なる。本実施形態では、障害物Q1が車両Vの左後方に位置し、障害物Q2が車両Vの右後方に位置する。
俯瞰映像生成部45は、障害物情報取得部43が取得した複数の障害物Qの位置情報に基づいて、映像データ取得部42が取得した周辺映像を、車両Vおよび障害物Qの少なくとも一部が俯瞰できるように、仮想視点Pと異なる仮想視点PD1として視点変換処理を行った映像を生成する。さらに、俯瞰映像生成部45は、複数の障害物Qの位置情報に基づいて、周辺映像を、車両Vおよび障害物Qの少なくとも残りの一部が俯瞰できるように、仮想視点Pと異なる仮想視点PD2として視点変換処理を行った映像を生成する。そして、俯瞰映像生成部45は、視点変換処理を行った二つの映像を合成して俯瞰映像を生成する。
視点変換処理部451は、車両Vの左後方、右後方に位置する障害物Q1、障害物Q2が検出されたとき、仮想視点Pに対して左側方の仮想視点PD1として視点変換処理を行った映像と、仮想視点Pに対して右側方の仮想視点PD2として視点変換処理を行った映像を生成する。仮想視点PD1の位置は、(xD1,yD1,zD1)で表される。仮想視点PD2の位置は、(xD2,yD2,zD2)で表される。
仮想視点PD1について説明する。本実施形態では、仮想視点PD1は、車両Vの左前方に位置している。仮想視点PD1は、Z軸方向視において、障害物Q1より左前方に位置している。仮想視点PD1は、Z軸方向視において、仮想視点Pより左前方に位置している。仮想視点PD1は、車両Vの中央と障害物Q1との距離より車両Vの中央から離れている。仮想視点PD1は、車両Vを左前方から斜めに見下すような視点である。
仮想視点PD2について説明する。本実施形態では、仮想視点PD2は、車両Vの右前方に位置している。仮想視点PD2は、Z軸方向視において、障害物Q2より右前方に位置している。仮想視点PD2は、Z軸方向視において、仮想視点Pより右前方に位置している。仮想視点PD2は、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PD2は、車両Vを右前方から斜めに見下すような視点である。
合成処理部453は、仮想視点PD1として視点変換処理した映像と、仮想視点PD2として視点変換処理した映像とを合成し俯瞰映像を生成する。例えば、合成処理部453は、左側に仮想視点PD1として視点変換処理した映像を表示し、右側に仮想視点PD2として視点変換処理した映像を表示するように合成して俯瞰映像を生成する。
次に、俯瞰映像生成システム1の俯瞰映像生成装置40における処理の流れについて説明する。俯瞰映像生成装置40は、図8に示すフローチャートに沿った処理を行う。本実施形態は、ステップS16における処理が第一実施形態と異なり、ステップS11〜ステップS15、ステップS17、ステップS18の処理は第一実施形態と同様の処理を行う。
制御部41は、仮想視点位置を変更する(ステップS16)。より詳しくは、制御部41は、俯瞰映像生成部45で、障害物情報取得部43が取得した複数の障害物Qの位置情報に基づいて、映像データ取得部42が取得した周辺映像を、車両Vおよび少なくとも障害物Q1が俯瞰できるように、仮想視点Pと異なる仮想視点PD1として視点変換処理を行った映像を生成させる。制御部41は、俯瞰映像生成部45で、複数の障害物Qの位置情報に基づいて、周辺映像を、車両Vおよび少なくとも障害物Q2が俯瞰できるように、仮想視点PD1と異なる仮想視点PD2として視点変換処理を行った映像を生成させる。そして、制御部41は、俯瞰映像生成部45で、二つの映像を合成して俯瞰映像を生成し、表示パネル30に表示させる。制御部41は、ステップS18に進む。
上述したように、本実施形態は、進行方向の左側および右側に障害物Qが検出された場合、複数の仮想視点で視点変換処理を行った映像を生成する。そして、視点変換処理を行った複数の映像を合成して俯瞰映像を生成する。本実施形態は、進行方向の進行方向の左側および右側に障害物Qが検出された場合、複数の仮想視点として視点変換処理を行った映像を合成することで、複数の障害物Qと車両Vの相対的な位置関係が表わされた俯瞰映像を表示することができる。
進行方向の左側および右側に障害物Qが検出された場合に、左側または右側のどちらかの仮想視点で視点変換処理を行って俯瞰映像を生成すると、仮想視点と反対側の障害物Qと車両Vの相対的な位置関係を表すことができないおそれがある。
これに対して、本実施形態によれば、進行方向の左側および右側に障害物Qが検出された場合も、例えば、それぞれの障害物Qの後方に立って、近づく車両Vを誘導するような仮想視点PD1とした映像と、仮想視点PD2とした映像とを合成した俯瞰映像を表示することができる。複数の障害物Qが車両Vに接触するか否かを俯瞰映像によって容易に認識することができる。このように、本実施形態は、俯瞰映像において複数の障害物Qを適切に表示することができる。本実施形態は、俯瞰映像における複数の障害物Qの視認性を向上することができる。本実施形態は、車両周辺の障害物Qを適切に確認可能に表示することができる。
[第五実施形態]
図15を参照しながら、本実施形態に係る俯瞰映像生成システム1について説明する。図15は、第五実施形態に係る俯瞰映像生成システムにおける仮想視点の位置の一例を説明する概略図である。本実施形態の俯瞰映像生成システム1は、俯瞰映像生成部45の視点変換処理部451における処理が、第一実施形態の俯瞰映像生成システム1と異なる。本実施形態では、障害物Q1、障害物Q2が車両Vの左後方に車幅方向に並んで位置する。
視点変換処理部451は、車両Vの左後方に位置する障害物Q1、障害物Q2が検出されたとき、車両Vの中央から障害物Q1への延長線L41に直交する直線L42と、車両Vの中央から障害物Q2への延長線L43に直交する直線L44との間の角度の二等分線L45上に位置する仮想視点PEとして俯瞰映像を生成してもよい。仮想視点PEの位置は、(xE,yE,zE)で表される。
仮想視点PEについて説明する。本実施形態では、仮想視点PEは、車両Vの左前方に位置している。仮想視点PEは、Z軸方向視において、障害物Q1、障害物Q2より左前方に位置している。仮想視点PEは、Z軸方向視において、仮想視点Pより左前方に位置している。仮想視点PEは、車両Vの中央と障害物Q1との距離、および、車両Vの中央と障害物Q2との距離より車両Vの中央から離れている。仮想視点PEは、車両Vを左前方から斜めに見下すような視点である。
次に、俯瞰映像生成システム1の俯瞰映像生成装置40における処理の流れについて説明する。俯瞰映像生成装置40は、図8に示すフローチャートに沿った処理を行う。本実施形態は、ステップS16における処理が第一実施形態と異なり、ステップS11〜ステップS15、ステップS17、ステップS18の処理は第一実施形態と同様の処理を行う。
制御部41は、仮想視点位置を変更する(ステップS16)。より詳しくは、制御部41は、俯瞰映像生成部45で、車両Vの中央から障害物Q1への延長線L41に直交する直線L42と、車両Vの中央から障害物Q2への延長線L43に直交する直線L44との間の角度の二等分線L45上に位置する仮想視点PEとして俯瞰映像を生成させ、表示パネル30に表示させる。制御部41は、ステップS18に進む。
上述したように、本実施形態は、進行方向に複数の障害物Qが検出された場合、車両Vおよび複数の障害物Qが俯瞰できるように車両Vの真上に位置する仮想視点Pから離間した仮想視点の俯瞰映像を生成する。本実施形態は、進行方向の複数の障害物Qが検出された場合、仮想視点の位置をずらして、複数の障害物Qが重ならず、複数の障害物Qと車両Vの相対的な位置関係が表わされた俯瞰映像を表示することができる。本実施形態によれば、複数の障害物Qが車両Vに接触するか否かを俯瞰映像によって容易に認識することができる。このように、本実施形態は、俯瞰映像において複数の障害物Qを適切に表示することができる。本実施形態は、俯瞰映像における複数の障害物Qの視認性を向上することができる。本実施形態は、車両周辺の複数の障害物Qを適切に確認可能に表示することができる。
本実施形態では、例えば、複数の障害物Qを視認できる位置に立って、近づく車両Vを誘導するような仮想視点PEとした俯瞰映像を表示することができる。これにより、車両Vの真上に位置する仮想視点Pとした俯瞰映像100に比べて、複数の障害物Qが車両Vに接触するか否を俯瞰映像によって容易に認識することができる。
さて、これまで本発明に係る俯瞰映像生成システム1について説明したが、上述した実施形態以外にも種々の異なる形態にて実施されてよいものである。
図示した俯瞰映像生成システム1の各構成要素は、機能概念的なものであり、必ずしも物理的に図示の如く構成されていなくてもよい。すなわち、各装置の具体的形態は、図示のものに限られず、各装置の処理負担や使用状況などに応じて、その全部または一部を任意の単位で機能的または物理的に分散または統合してもよい。
俯瞰映像生成システム1の構成は、例えば、ソフトウェアとして、メモリにロードされたプログラムなどによって実現される。上記実施形態では、これらのハードウェアまたはソフトウェアの連携によって実現される機能ブロックとして説明した。すなわち、これらの機能ブロックについては、ハードウェアのみ、ソフトウェアのみ、または、それらの組み合わせによって種々の形で実現できる。
上記に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものを含む。さらに、上記に記載した構成は適宜組み合わせが可能である。また、本発明の要旨を逸脱しない範囲において構成の種々の省略、置換または変更が可能である。
所定条件は、障害物Qが車両Vの進行方向に位置すること、として説明したが、これに限定されない。所定条件は、例えば、車両Vに干渉するおそれがあること、としてもよい。車両Vに干渉するおそれがあるとは、例えば、車両Vの進行方向に位置し、かつ、車両Vと接触するおそれのある地面からの高さを有することである。
所定条件は、車両Vが後退しているとき、障害物Qが車両Vの前端より後方に位置する場合、所定条件を満たすと判定するとしたが、これに限定されるものではない。例えば、所定条件は、車両Vが後退しているとき、障害物Qが車両Vの後端より後方に位置する場合、または、障害物Qが車両Vの駆動輪の車軸位置より後方に位置する場合、所定条件を満たすと判定してもよい。
制御部41は、ステップS11において、例えば、操作部に対する、俯瞰映像表示開始の操作の検出の有無で、俯瞰映像表示を開始するか否かを判定してもよい。
仮想視点の位置を変更した俯瞰映像は、障害物Qを検出した方向の表示面積が広くなるように、自車両アイコンの中央を俯瞰映像の中央からずらした俯瞰映像を生成してもよい。
仮想視点Pは、Z方向の位置を、例えば、運転席に座った運転者の視線の高さ、運転者が立ったときの視線の高さ、車両Vのルーフの高さ、などとしてもよい。