JP6719368B2 - 3次元空間可視化装置、3次元空間可視化方法およびプログラム - Google Patents
3次元空間可視化装置、3次元空間可視化方法およびプログラム Download PDFInfo
- Publication number
- JP6719368B2 JP6719368B2 JP2016231269A JP2016231269A JP6719368B2 JP 6719368 B2 JP6719368 B2 JP 6719368B2 JP 2016231269 A JP2016231269 A JP 2016231269A JP 2016231269 A JP2016231269 A JP 2016231269A JP 6719368 B2 JP6719368 B2 JP 6719368B2
- Authority
- JP
- Japan
- Prior art keywords
- interference
- data
- space
- dimensional
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Landscapes
- Length Measuring Devices By Optical Means (AREA)
Description
(第1実施形態)
第1実施形態の3次元空間干渉判定システムの構成を示すブロック図である。図2は図1の3次元空間干渉判定システムの動作を示すフローチャートである。
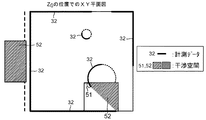
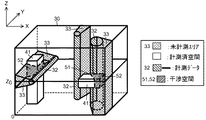
すなわち未計測エリア識別部103は、座標統合部102により統合された統合形状データに基づき、計測対象空間内で柱や配管などの物に隠れて計測されていない未計測エリアを識別し未計測エリアデータを生成する。
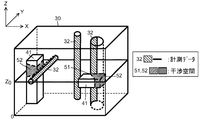
この3次元空間干渉判定システム10の場合、計測対象となる計測対象空間内の複数の計測位置に3次元計測装置11を配置し、各位置において3次元計測装置11が計測を行い、形状データd1を取得し(ステップS1)、形状データ蓄積部101aに保存する。
計測対象空間を予め設定した所定の大きさの複数のブロック(例えば、一辺10mmの立方体)に分割する。ブロックの大きさや形状についてはこの例に限定されるものではなく、対象空間の大きさなどに応じて適宜設定してよい。
図8は第2実施形態の3次元空間干渉判定システムの構成を示すブロック図である。図9は図8の3次元空間干渉判定システムの動作を示すフローチャートである。なお第2実施形態の構成を説明するにあたり第1実施形態と同じ構成には同一の符号を付しその説明は省略する。
この第2実施形態では、図9のステップS1からステップS7までの処理ステップは、第1実施形態と同じであり、ここまでの処理によって、形状データとオブジェクト41との干渉判定が行われる。
図12は第3実施形態の3次元空間干渉判定システムの構成を示すブロック図である。なお第3実施形態の構成を説明するにあたり第1および第2実施形態と同じ構成には同一の符号を付しその説明は省略する。
図16は第4実施形態の3次元空間干渉判定システムの構成を示すブロック図である。図17は図16の3次元空間干渉判定システムの動作を示すフローチャートである。この第4実施形態の構成は、第1の実施形態に示した構成から3次元計測装置11、座標統合部102、未計測エリア識別部103を省き、これら装置および各部から得られるデータ(形状データd1、未計測エリアデータd2)を予めPC12のデータ蓄積部101に蓄積しておき、PC12だけで処理を行うよう構成したものであり、PC12に未計測エリア取得部111を追加している。
11…3次元計測装置
12…PC
13…パラメータ入力部
14…表示部
100…形状データ取得部
101…データ蓄積部
101a…形状データ蓄積部
101b…空間データ蓄積部
101c…オブジェクトデータ蓄積部
101d…干渉空間データ蓄積部
102…座標統合部
103…未計測エリア識別部
104…オブジェクト配置部
106…干渉判定部
106a…干渉空間データ生成部
107…画像生成部
109…調査範囲設定部
110…オブジェクト経路設定部
111…未計測エリア取得部
d1…形状データ
d2…未計測エリアデータ
d3…3次元オブジェクトデータ
Claims (14)
- 物が存在する計測対象空間内のある基準位置からスキャンして計測された3次元の計測部位を示す形状データと、この形状データに基づき、前記計測対象空間内で前記物に隠れて計測されていない未計測エリアを識別して得られた未計測エリアデータとを基に前記計測対象空間内に表現した前記計測部位と未計測エリア、を含む3次元画像に任意のオブジェクトを配置するための画面を表示する配置部と、
前記3次元画像に配置されたオブジェクトと、前記3次元画像の前記計測部位および前記未計測エリアの少なくとも一方との干渉の有無を判定する干渉判定部と
を具備する3次元空間可視化装置。 - 前記形状データと前記未計測エリアデータを記憶した蓄積部と、
前記形状データと前記未計測エリアデータとを前記蓄積部から読み出す取得部と
を具備する請求項1記載の3次元空間可視化装置。 - 前記形状データを外部から取得する計測データ取得部と、
前記形状データに基づき、前記未計測エリアを識別し前記未計測エリアデータを生成す
る未計測エリア識別部と
を具備する請求項1記載の3次元空間可視化装置。 - 前記干渉判定部は、干渉ありと判定した干渉部位に相当する干渉空間データを生成する
干渉空間データ生成部を具備する請求項1および請求項3いずれか1項に記載の3次元空間可視化装置。 - 前記干渉空間データを基に、前記3次元画像および前記オブジェクトの少なくとも一方に前記干渉部位を重ね合わせた画像を生成し出力する画像生成部を具備する請求項4に記載の3次元空間可視化装置。
- 前記画像生成部は、
前記干渉部位を、前記オブジェクトとは異なる表示形態にして前記オブジェクトと重ねた画像を生成し出力する請求項5に記載の3次元空間可視化装置。 - 物が存在する計測対象空間内のある基準位置からスキャンして計測された3次元の計測部位を示すローカル座標系の形状データを、一つのグローバル座標系に統合する座標統合部を具備する請求項1に記載の3次元空間可視化装置。
- 前記干渉判定部は、
前記オブジェクトと前記計測部位との第1干渉部位の有無、および前記オブジェクトと前記未計測エリアとの第2干渉部位の有無をそれぞれ識別し、
前記干渉空間データ生成部は、
前記干渉判定部により干渉ありと判定された前記第1干渉部位に相当する第1干渉空間データと前記第2干渉部位に相当する第2干渉空間データとをそれぞれ生成する請求項4記載の3次元空間可視化装置。 - 前記3次元画像を切り取る断面の方向および位置を設定する断面設定部と、
前記断面設定部により設定された断面と直交する方向に調査範囲を設定する調査範囲設定部とを備え、
前記干渉空間データ生成部は、
前記調査範囲内の前記干渉部位を前記方向に沿って、設定された位置の範囲で、前記干渉空間データの和集合を取った干渉空間データを生成し、
前記画像生成部は、
前記調査範囲内の3次元画像および前記オブジェクトの少なくとも一方に前記干渉部位を重ね合わせた画像を生成する請求項5または請求項6いずれか記載の3次元空間可視化装置。 - 前記計測対象空間内における前記オブジェクトの移動経路を設定する設定部を備え、
前記干渉判定部は、
前記オブジェクトを移動させた前記移動経路上の任意の位置において、前記オブジェクトと前記計測部位との干渉の有無、および前記オブジェクトと前記未計測エリアとの干渉の有無を判定し、
前記干渉空間データ生成部は、
前記干渉判定部により干渉ありと判定された干渉部位の移動位置毎または移動時間毎の時系列干渉空間データを生成する請求項4に記載の3次元空間可視化装置。 - 前記画像生成部は、
前記時系列干渉空間データから任意の位置または時刻における干渉空間データを抽出し、その位置または時刻での前記オブジェクトと前記計測部位を重ね合わせた画像、および/または前記オブジェクトと前記未計測エリアとを重ね合わせた画像を生成する請求項10に記載の3次元空間可視化装置。 - 前記画像生成部は、
前記移動経路上の各位置における前記時系列干渉空間データの和集合データを生成し、生成した前記和集合データと前記計測部位を重ね合わせた画像、および/または生成した前記和集合データと前記未計測エリアとを重ね合わせた画像を生成する請求項10記載の3次元空間可視化装置。 - 物が存在する計測対象空間内のある基準位置からスキャンして計測された3次元の計測部位を示す形状データと、この形状データに基づき、前記計測対象空間内で前記物に隠れて計測されていない未計測エリアを識別して得られた未計測エリアデータとを基に前記計測対象空間内に表現した前記計測部位と前記未計測エリア、を含む3 次元画像に任意のオブジェクトを配置するための画面を表示し、
干渉判定部によって、前記3次元画像に配置されたオブジェクトと、前記3次元画像の前記計測部位および前記未計測エリアの少なくとも一方との干渉の有無を判定する3次元空間可視化方法。 - 物が存在する計測対象空間内のある基準位置からスキャンして計測された3次元の計測部位を示す形状データと、この形状データに基づき、前記計測対象空間内で前記物に隠れて計測されていない未計測エリアを識別して得られた未計測エリアデータとを基に前記計測対象空間内に表現した前記計測部位と前記未計測エリア、を含む3次元画像に任意のオブジェクトを配置するための画面を表示し、
前記3次元画像に配置されたオブジェクトと、前記3次元画像の前記計測部位および前記未計測エリアの少なくとも一方との干渉の有無を判定する
手順をコンピュータに実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016231269A JP6719368B2 (ja) | 2016-11-29 | 2016-11-29 | 3次元空間可視化装置、3次元空間可視化方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016231269A JP6719368B2 (ja) | 2016-11-29 | 2016-11-29 | 3次元空間可視化装置、3次元空間可視化方法およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018088139A JP2018088139A (ja) | 2018-06-07 |
| JP6719368B2 true JP6719368B2 (ja) | 2020-07-08 |
Family
ID=62494560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016231269A Active JP6719368B2 (ja) | 2016-11-29 | 2016-11-29 | 3次元空間可視化装置、3次元空間可視化方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6719368B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7282656B2 (ja) * | 2019-11-11 | 2023-05-29 | 日立造船株式会社 | 移動過程提示装置、移動過程提示方法、移動過程提示プログラムおよび記録媒体 |
| CN113496049B (zh) * | 2020-04-03 | 2024-03-12 | 琦境科技(北京)有限公司 | 一种三维空间物品规划的方法和系统 |
| WO2023058098A1 (ja) * | 2021-10-04 | 2023-04-13 | 日本電気株式会社 | 表示装置、表示方法及び非一時的なコンピュータ可読媒体 |
| JP7440972B2 (ja) | 2022-06-23 | 2024-02-29 | nat株式会社 | 室内レイアウト支援方法、システム及びプログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004178006A (ja) * | 2002-11-22 | 2004-06-24 | Ricoh Co Ltd | 3次元形状処理装置、モデル干渉部表示方法、プログラム、及び記憶媒体 |
| JP2005242531A (ja) * | 2004-02-25 | 2005-09-08 | Hitachi Ltd | 3d−cadを活用した据付工事管理システム |
| JP4959518B2 (ja) * | 2007-11-16 | 2012-06-27 | 株式会社Nykシステムズ | 3次元cgオブジェクト干渉チェックプログラム |
| JP6377536B2 (ja) * | 2015-01-15 | 2018-08-22 | 株式会社東芝 | 空間情報可視化装置、プログラムおよび空間情報可視化方法 |
-
2016
- 2016-11-29 JP JP2016231269A patent/JP6719368B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018088139A (ja) | 2018-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3055648B1 (en) | Method and system for 3d modeling using feature detection | |
| JP6719368B2 (ja) | 3次元空間可視化装置、3次元空間可視化方法およびプログラム | |
| RU2643619C2 (ru) | Способы и системы для контроля заготовки | |
| KR20180131471A (ko) | 3d 스캐닝과 bim을 이용한 시공 오차 통합 관리 장치 및 그 방법 | |
| JP6377536B2 (ja) | 空間情報可視化装置、プログラムおよび空間情報可視化方法 | |
| JP4492654B2 (ja) | 3次元計測方法および3次元計測装置 | |
| Gao et al. | An approach to combine progressively captured point clouds for BIM update | |
| JPWO2014192316A1 (ja) | モデリング装置、3次元モデル生成装置、モデリング方法、プログラム、レイアウトシミュレータ | |
| Kalasapudi et al. | Toward automated spatial change analysis of MEP components using 3D point clouds and as-designed BIM models | |
| KR102043278B1 (ko) | 플랜트 시공 지원 방법 및 시스템 | |
| JP6496583B2 (ja) | 仮設足場計画支援システム | |
| Bonduel et al. | Scan-to-bim output validation: Towards a standardized geometric quality assessment of building information models based on point clouds | |
| JP6386263B2 (ja) | 画像形成装置、画像形成システム及び画像形成プログラム | |
| CN115906228A (zh) | 建筑信息模型的生成 | |
| JP5673489B2 (ja) | 点群データの処理装置、処理方法、処理プログラム及び記録媒体 | |
| JP2023547784A (ja) | 経時的な建物建設のデータ管理 | |
| JP7300930B2 (ja) | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム | |
| JP2011033438A (ja) | 出来型精度確認システム、三次元計測機配置計画装置、三次元計測機配置計画プログラムおよび三次元計測機配置計画方法 | |
| JP2018088065A (ja) | 情報可視化システム、情報可視化方法、及びプログラム | |
| JP6280425B2 (ja) | 画像処理装置、画像処理システム、3次元計測器、画像処理方法及び画像処理プログラム | |
| JP3708762B2 (ja) | プラント運転監視方法とその装置 | |
| JP2020060907A (ja) | 避雷保護範囲生成システムおよびプログラム | |
| JP7413383B2 (ja) | 情報表示装置、方法及びプログラム | |
| VARLIK et al. | Generation and comparison of BIM models with CAD to BIM and scan to BIM techniques | |
| JP2013058106A (ja) | 3次元cadデータ作成システムおよび3次元cadデータ作成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20171107 Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20171107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200519 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200616 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6719368 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |