JP6701253B2 - 車外環境認識装置 - Google Patents
車外環境認識装置 Download PDFInfo
- Publication number
- JP6701253B2 JP6701253B2 JP2018054906A JP2018054906A JP6701253B2 JP 6701253 B2 JP6701253 B2 JP 6701253B2 JP 2018054906 A JP2018054906 A JP 2018054906A JP 2018054906 A JP2018054906 A JP 2018054906A JP 6701253 B2 JP6701253 B2 JP 6701253B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- image
- block
- brightness
- generation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002131 composite material Substances 0.000 claims description 40
- 238000003384 imaging method Methods 0.000 claims description 33
- 230000035508 accumulation Effects 0.000 claims description 20
- 238000009825 accumulation Methods 0.000 claims description 20
- 230000006870 function Effects 0.000 claims description 11
- 239000000284 extract Substances 0.000 claims description 8
- 238000000034 method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 16
- 238000010586 diagram Methods 0.000 description 10
- 230000001186 cumulative effect Effects 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/92—Dynamic range modification of images or parts thereof based on global image properties
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/97—Determining parameters from multiple pictures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/64—Three-dimensional objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10141—Special mode during image acquisition
- G06T2207/10144—Varying exposure
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20208—High dynamic range [HDR] image processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20221—Image fusion; Image merging
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30261—Obstacle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Description
図1は、車外環境認識システム100の接続関係を示したブロック図である。車外環境認識システム100は、撮像装置110と、車外環境認識装置120と、車両制御装置(ECU:Engine Control Unit)130とを含んで構成される。
図3は、車外環境認識装置120の概略的な機能を示した機能ブロック図である。図3に示すように、車外環境認識装置120は、I/F部150と、データ保持部152と、中央制御部154とを含んで構成される。
図4は、車外環境認識処理の流れを示すフローチャートである。車外環境認識処理では、第1輝度画像取得部160により、2つの撮像装置110において所定の第1露光時間で撮像した2つの第1輝度画像を取得する第1輝度画像取得処理(S200)が実行され、第2輝度画像取得部162により、2つの撮像装置110において第1露光時間より短い第2露光時間で撮像した2つの第2輝度画像を取得する第2輝度画像取得処理(S202)が実行される。
第1輝度画像取得部160は、2つの撮像装置110それぞれの露光時間(撮像素子がレンズを通して光に晒される時間)を、車外環境の比較的暗い部分(例えば、日陰)が黒つぶれすることなく、そのエッジを取得することができる所定の第1露光時間(長露光時間)に設定し、撮像された2つの第1輝度画像を取得する。
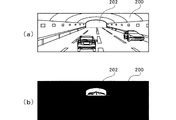
第2輝度画像取得部162は、2つの撮像装置110それぞれの露光時間を、車外環境の比較的明るい部分(例えば、日向)が白飛びすることなく、そのエッジを取得することができる所定の第2露光時間(短露光時間)に設定し、撮像された複数の第2輝度画像を取得する。かかる第2露光時間は、露出を抑えるため、第1露光時間より短い。また、第1輝度画像取得部160と第2輝度画像取得部162との撮像間隔は、画像間の同時性を担保するため、極短時間であることが望ましい。
第1距離画像生成部164は、第1輝度画像取得部160が取得した2つの第1輝度画像210、212を用い、パターンマッチングによって視差情報を有する1の第1距離画像を生成する。
第2距離画像生成部166は、第2輝度画像取得部162が取得した2つの第2輝度画像を用い、パターンマッチングによって視差情報を有する1の第2距離画像を生成する。
合成画像生成部168は、第1距離画像214および第2距離画像224を用い、第1距離画像214の任意のブロック、および、この任意のブロックに対応する第2距離画像224のブロックの2つのブロックのうち、距離の信頼度が高いブロックを抽出して1の合成画像を生成する。
立体物特定部170は、合成画像生成部168が生成した合成画像234に基づいて立体物を特定する。具体的に、立体物特定部170は、まず、合成画像234中の視差情報に基づき、水平距離x、高さyおよび相対距離zが所定の距離閾値以下である場合に、そのブロック同士をグループ化して立体物とする。そして、グループ化した立体物がいずれの特定物に対応するか特定する。例えば、立体物特定部170は、立体物が、車両らしい大きさ、形状、相対速度であり、かつ、後方の所定の位置にブレーキランプやハイマウントストップランプ等の発光源が確認された場合、その立体物を先行車両と特定する。
110 撮像装置
120 車外環境認識装置
160 第1輝度画像取得部
162 第2輝度画像取得部
164 第1距離画像生成部
166 第2距離画像生成部
168 合成画像生成部
170 立体物特定部
214 第1距離画像
224 第2距離画像
234 合成画像
Claims (4)
- コンピュータが、
位置を異にする複数の撮像装置において所定の第1露光時間で撮像した複数の第1輝度画像を取得する第1輝度画像取得部と、
前記複数の撮像装置において前記第1露光時間より短い第2露光時間で撮像した複数の第2輝度画像を取得する第2輝度画像取得部と、
前記複数の第1輝度画像をパターンマッチングして第1距離画像を生成する第1距離画像生成部と、
前記複数の第2輝度画像をパターンマッチングして第2距離画像を生成する第2距離画像生成部と、
前記第1距離画像の任意のブロック、および、前記任意のブロックに対応する前記第2距離画像のブロックのうち、距離の信頼度が高いブロックを抽出して合成画像を生成する合成画像生成部、
として機能し、
前記ブロックとの距離が距離閾値以下であるブロック数が所定数以上である場合、前記ブロックとの距離が距離閾値以下であるブロック数が所定数未満である場合と比べ、前記距離の信頼度が高い車外環境認識装置。 - コンピュータが、
位置を異にする複数の撮像装置において所定の第1露光時間で撮像した複数の第1輝度画像を取得する第1輝度画像取得部と、
前記複数の撮像装置において前記第1露光時間より短い第2露光時間で撮像した複数の第2輝度画像を取得する第2輝度画像取得部と、
前記複数の第1輝度画像をパターンマッチングして第1距離画像を生成する第1距離画像生成部と、
前記複数の第2輝度画像をパターンマッチングして第2距離画像を生成する第2距離画像生成部と、
前記第1距離画像の任意のブロック、および、前記任意のブロックに対応する前記第2距離画像のブロックのうち、距離の信頼度が高いブロックを抽出して合成画像を生成する合成画像生成部、
として機能し、
前記ブロックの輝度差累積が所定値以上である場合、前記ブロックの輝度差累積が所定値未満である場合と比べ、前記距離の信頼度が高い車外環境認識装置。 - コンピュータが、
位置を異にする複数の撮像装置において所定の第1露光時間で撮像した複数の第1輝度画像を取得する第1輝度画像取得部と、
前記複数の撮像装置において前記第1露光時間より短い第2露光時間で撮像した複数の第2輝度画像を取得する第2輝度画像取得部と、
前記複数の第1輝度画像をパターンマッチングして第1距離画像を生成する第1距離画像生成部と、
前記複数の第2輝度画像をパターンマッチングして第2距離画像を生成する第2距離画像生成部と、
前記第1距離画像の任意のブロック、および、前記任意のブロックに対応する前記第2距離画像のブロックのうち、前記ブロックの輝度差累積が高いブロックを抽出して合成画像を生成する合成画像生成部、
として機能する車外環境認識装置。 - 前記合成画像生成部は、前記ブロックの輝度差累積が同値の場合、前記第2距離画像のブロックを抽出する請求項3に記載の車外環境認識装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018054906A JP6701253B2 (ja) | 2018-03-22 | 2018-03-22 | 車外環境認識装置 |
| US16/241,804 US10839236B2 (en) | 2018-03-22 | 2019-01-07 | Vehicle exterior environment recognition apparatus |
| DE102019101482.4A DE102019101482A1 (de) | 2018-03-22 | 2019-01-22 | Erkennungsvorrichtung für die äussere umgebung eines fahrzeugs |
| CN201910084471.8A CN110298793A (zh) | 2018-03-22 | 2019-01-29 | 车外环境识别装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018054906A JP6701253B2 (ja) | 2018-03-22 | 2018-03-22 | 車外環境認識装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019168821A JP2019168821A (ja) | 2019-10-03 |
| JP6701253B2 true JP6701253B2 (ja) | 2020-05-27 |
Family
ID=67848413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018054906A Active JP6701253B2 (ja) | 2018-03-22 | 2018-03-22 | 車外環境認識装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10839236B2 (ja) |
| JP (1) | JP6701253B2 (ja) |
| CN (1) | CN110298793A (ja) |
| DE (1) | DE102019101482A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021156579A (ja) * | 2018-06-29 | 2021-10-07 | ソニーグループ株式会社 | 画像処理装置、画像処理方法、移動機器、並びにプログラム |
| US11100623B2 (en) * | 2019-05-02 | 2021-08-24 | International Business Machines Corporation | Real time estimation of indoor lighting conditions |
| US11594036B2 (en) * | 2019-08-21 | 2023-02-28 | Micron Technology, Inc. | Advanced driver-assistance system (ADAS) operation utilizing algorithmic skyline detection |
| JP7356319B2 (ja) * | 2019-10-17 | 2023-10-04 | 株式会社Subaru | 車外環境認識装置 |
| CN112766026B (zh) * | 2019-11-05 | 2024-02-02 | 大富科技(安徽)股份有限公司 | 交通灯的检测方法、计算机存储介质、车载终端和车辆 |
| US11055835B2 (en) * | 2019-11-19 | 2021-07-06 | Ke.com (Beijing) Technology, Co., Ltd. | Method and device for generating virtual reality data |
| JP7543367B2 (ja) | 2022-10-26 | 2024-09-02 | キヤノン株式会社 | 情報処理装置、移動体制御システムおよび情報処理方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3349060B2 (ja) | 1997-04-04 | 2002-11-20 | 富士重工業株式会社 | 車外監視装置 |
| JP5367640B2 (ja) * | 2010-05-31 | 2013-12-11 | パナソニック株式会社 | 撮像装置および撮像方法 |
| JP2012160852A (ja) * | 2011-01-31 | 2012-08-23 | Olympus Corp | 画像合成装置、撮像装置、画像合成方法、および、画像合成プログラム |
| JP5499011B2 (ja) | 2011-11-17 | 2014-05-21 | 富士重工業株式会社 | 車外環境認識装置および車外環境認識方法 |
| JP5798011B2 (ja) * | 2011-11-18 | 2015-10-21 | 富士重工業株式会社 | 車外環境認識装置 |
| JP2015073185A (ja) * | 2013-10-02 | 2015-04-16 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| CN104113733B (zh) * | 2014-07-25 | 2017-10-27 | 北京机械设备研究所 | 一种低慢小目标电视搜索探测方法 |
| JP6420650B2 (ja) * | 2014-12-10 | 2018-11-07 | 株式会社Subaru | 車外環境認識装置 |
| JP2018054906A (ja) | 2016-09-29 | 2018-04-05 | シャープ株式会社 | サーバ装置、情報処理端末、システム、および方法 |
| CN106791470B (zh) * | 2016-12-28 | 2019-08-16 | 上海兴芯微电子科技有限公司 | 基于高动态范围摄像装置的曝光控制方法和装置 |
-
2018
- 2018-03-22 JP JP2018054906A patent/JP6701253B2/ja active Active
-
2019
- 2019-01-07 US US16/241,804 patent/US10839236B2/en active Active
- 2019-01-22 DE DE102019101482.4A patent/DE102019101482A1/de active Pending
- 2019-01-29 CN CN201910084471.8A patent/CN110298793A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US10839236B2 (en) | 2020-11-17 |
| JP2019168821A (ja) | 2019-10-03 |
| CN110298793A (zh) | 2019-10-01 |
| DE102019101482A1 (de) | 2019-09-26 |
| US20190294899A1 (en) | 2019-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6701253B2 (ja) | 車外環境認識装置 | |
| US8908924B2 (en) | Exterior environment recognition device and exterior environment recognition method | |
| JP6132412B2 (ja) | 車外環境認識装置 | |
| JP5886809B2 (ja) | 車外環境認識装置 | |
| US10037473B2 (en) | Vehicle exterior environment recognition apparatus | |
| JP6561512B2 (ja) | 視差値導出装置、移動体、ロボット、視差値導出方法、視差値生産方法及びプログラム | |
| US10148938B2 (en) | Vehicle-mounted image recognition device to set a stereoscopic-vision and monocular-vision image areas | |
| US10121083B2 (en) | Vehicle exterior environment recognition apparatus | |
| JP6420650B2 (ja) | 車外環境認識装置 | |
| JP2015069381A (ja) | 車外環境認識装置 | |
| EP3115966A1 (en) | Object detection device, object detection method, and computer program | |
| JP6589313B2 (ja) | 視差値導出装置、機器制御システム、移動体、ロボット、視差値導出方法、およびプログラム | |
| JP7261006B2 (ja) | 車外環境認識装置 | |
| JP6561511B2 (ja) | 視差値導出装置、移動体、ロボット、視差値生産導出方法、視差値の生産方法及びプログラム | |
| JP6591188B2 (ja) | 車外環境認識装置 | |
| JP7356319B2 (ja) | 車外環境認識装置 | |
| KR101511586B1 (ko) | 터널 인식에 의한 차량 제어장치 및 제어방법 | |
| JP7229032B2 (ja) | 車外物体検出装置 | |
| JP6329438B2 (ja) | 車外環境認識装置 | |
| JP2019204988A (ja) | 画像処理装置及び画像処理方法 | |
| JP2015069380A (ja) | 車外環境認識装置 | |
| JP6335065B2 (ja) | 車外環境認識装置 | |
| JP6523694B2 (ja) | 車外環境認識装置 | |
| JP2016024677A (ja) | 撮像装置及び判定方法 | |
| WO2022130780A1 (ja) | 画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181102 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200501 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6701253 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |