JP6700680B2 - 支持装置、リソグラフィ装置、および物品の製造方法 - Google Patents
支持装置、リソグラフィ装置、および物品の製造方法 Download PDFInfo
- Publication number
- JP6700680B2 JP6700680B2 JP2015121425A JP2015121425A JP6700680B2 JP 6700680 B2 JP6700680 B2 JP 6700680B2 JP 2015121425 A JP2015121425 A JP 2015121425A JP 2015121425 A JP2015121425 A JP 2015121425A JP 6700680 B2 JP6700680 B2 JP 6700680B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- unit
- information
- units
- control mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Feedback Control In General (AREA)
Description
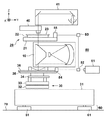
図1に、本発明の支持装置が適用されうる露光装置の概略構成を示す。なお、本発明は、後述するように多くの産業機械に適用可能であるが、ここでは、パターン形成を基板に行うリソグラフィ装置のうちの露光装置に関して説明する。本実施形態に係る露光装置は例えば、FPD用のガラス基板のような大型の基板にマスクのパタ−ンを転写する走査型投影露光装置である。図1において、投影光学系10を挟んで垂直方向(Z軸方向)の上側にマスクステージ20が配置され、下側には基板ステージ30が配置されている。これらマスクステージ20と基板ステージ30はそれぞれ個別に移動可能であり、これらの移動位置はともにレーザ干渉計システム50により計測・制御が可能である。

第2実施形態に係る能動的除振装置60について説明する。この能動的除振装置60は、第1実施形態と同様、基礎または設置面70上に設置され、例えば4脚以上の能動的支持脚61により構造体31を支持している。図3に示されるように、構造体31は空気ばね100a〜dによって支持される。変位センサ101a〜cは、構造体31と設置面70との相対位置を検出する。すなわち、本実施形態では、構造体31を支持する少なくとも4箇所のうちの少なくとも3箇所における構造体31の位置を検出する。制御アクチュエータ102a〜dは、空気ばね100a〜dの圧力を変化させ構造体31に駆動力を与える。ドライバ103a〜dは、制御アクチュエータ102a〜dに制御電流を与える。制御器104は、変位センサ101a〜cからの検出信号に基づきドライバ103a〜dに制御信号を与える。制御器104において、モード分離器107は、変位センサ101a〜cからの信号を各モード成分(本実施形態の場合、Z、θx、θy)に変換する。そして、各モード成分に対するFBコントローラ108a〜dが、制御信号を生成する。
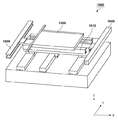
前述の実施形態に係る支持装置の適用例を説明する。当該支持装置は、種々の装置、例えば、ロボットや運輸、工作、加工、計測、製造に係る機械または装置(産業機械または装置)等において対象物(例えば定盤や基準物体)の支持に有用である。ここでは、一例として、産業機械としてのリソグラフィ装置(露光装置等)に備えられるステージ(XYステージ)装置への適用例を説明する。図4は、本適用例において当該支持装置が支持するステージ装置1000の構成例を示す図である。
本発明の実施形態における物品の製造方法は、例えば、半導体デバイス等のマイクロデバイスや微細構造を有する素子等の物品を製造するのに好適である。本実施形態の物品の製造方法は、上記のリソグラフィ装置(露光装置やインプリント装置、描画装置など)を用いて基板に原版のパターンを転写する工程と、かかる工程でパターンが転写された基板を加工する工程とを含む。更に、かかる製造方法は、他の周知の工程(酸化、成膜、蒸着、ドーピング、平坦化、エッチング、レジスト剥離、ダイシング、ボンディング、パッケージング等)を含む。本実施形態の物品の製造方法は、従来の方法に比べて、物品の性能・品質・生産性・生産コストの少なくとも1つにおいて有利である。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (8)
- 設置面上に対象物を支持するための複数の駆動部と、
前記複数の駆動部のうちの少なくとも一部に関してそれぞれ設けられ、それぞれが前記設置面に対する前記対象物の位置を計測する複数の計測部と、
前記複数の計測部の出力に基づいて前記複数の駆動部を制御する制御部と、
を含み、
前記制御部は、前記対象物の位置および姿勢のうちの少なくとも一方を制御し且つ前記対象物の形状を制御しない第1制御モードと、前記少なくとも一方と前記形状とを制御する第2制御モードとを有し、
前記制御部は、前記第1制御モードにおいて前記複数の計測部によりそれぞれ得られた複数の位置に基づいて前記第2制御モードにおける目標値を更新する
ことを特徴とする支持装置。 - 前記設置面に対する前記対象物の位置の目標値を記憶する記憶部を有し、
前記制御部は、
制御モードを前記第1制御モードにして、前記記憶部に記憶されている前記目標値に対して、前記複数の計測部の出力に基づく前記対象物のフィードバック制御を行い、
前記フィードバック制御の後に前記複数の計測部によりそれぞれ得られた複数の位置に基づいて、前記記憶部に記憶されている前記目標値を更新し、
制御モードを前記第2制御モードに切り替えて、前記記憶部に記憶されている前記更新された目標値に対して、前記複数の計測部の出力部に基づく前記対象物のフィードバック制御を行う
ことを特徴とする請求項1に記載の支持装置。 - 前記複数の駆動部における駆動部の数は、少なくとも4つであることを特徴とする請求項1または2に記載の支持装置。
- 前記制御部は、
前記複数の計測部により得られた前記複数の位置の情報を前記位置、前記姿勢および前記形状の情報に変換する第1変換部と、
前記第1変換部で変換されて得られた情報に基づいて得られた制御に係る前記位置、前記姿勢および前記形状の情報を前記複数の駆動部に対する操作量の情報に変換する第2変換部と、
を含むことを特徴とする請求項1乃至3のいずれか1項に記載の支持装置。 - 前記複数の計測部は、前記複数の駆動部が前記対象物を支持する少なくとも4箇所のうちの3箇所に関して前記対象物の位置を計測するように構成され、
前記対象物の形状を計測する第2計測部を更に有し、
前記制御部は、
前記複数の計測部により得られた前記3箇所における前記対象物の位置の情報を前記位置および前記姿勢の情報に変換する第1変換部と、
前記第1変換部で変換されて得られた情報と前記第2計測部で得られた形状の情報とに基づいて得られた制御に係る前記位置、前記姿勢および前記形状の情報を前記複数の駆動部に対する操作量の情報に変換する第2変換部と、
を含むことを特徴とする請求項3に記載の支持装置。 - 前記複数の駆動部のそれぞれは、空気ばねを含むことを特徴とする請求項1乃至5のいずれか1項に記載の支持装置。
- パターン形成を基板に行うリソグラフィ装置であって、
請求項1乃至6のうちいずれか1項に記載の支持装置と、
前記支持装置により支持された構造体と、
を含むことを特徴とするリソグラフィ装置。 - 請求項7に記載のリソグラフィ装置を用いてパターン形成を基板に行う工程と、
前記工程で前記パターン形成を行われた前記基板を加工する工程と、
を含むことを特徴とする物品の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015121425A JP6700680B2 (ja) | 2015-06-16 | 2015-06-16 | 支持装置、リソグラフィ装置、および物品の製造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015121425A JP6700680B2 (ja) | 2015-06-16 | 2015-06-16 | 支持装置、リソグラフィ装置、および物品の製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017010080A JP2017010080A (ja) | 2017-01-12 |
| JP6700680B2 true JP6700680B2 (ja) | 2020-05-27 |
Family
ID=57763531
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015121425A Active JP6700680B2 (ja) | 2015-06-16 | 2015-06-16 | 支持装置、リソグラフィ装置、および物品の製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6700680B2 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI468880B (zh) * | 2012-06-15 | 2015-01-11 | Asml Netherlands Bv | 定位系統、微影裝置及器件製造方法 |
| JP2014022467A (ja) * | 2012-07-13 | 2014-02-03 | Canon Inc | 露光装置、校正方法および物品の製造方法 |
| JP2015082557A (ja) * | 2013-10-22 | 2015-04-27 | キヤノン株式会社 | 露光装置 |
-
2015
- 2015-06-16 JP JP2015121425A patent/JP6700680B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017010080A (ja) | 2017-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101055425B (zh) | 光刻装置以及器件制造方法 | |
| KR101325607B1 (ko) | 대상물 테이블을 위치시키는 스테이지 장치, 리소그래피 장치 및 방법 | |
| US9477092B2 (en) | Optical imaging arrangement with individually actively supported components | |
| TWI418923B (zh) | 定位系統、微影裝置及方法 | |
| TWI395889B (zh) | 阻尼物件之方法、主動阻尼系統及微影裝置 | |
| US20050214657A1 (en) | Method of generating writing pattern data of mask and method of writing mask | |
| US9523569B2 (en) | Positioning apparatus, lithography apparatus, and article manufacturing method | |
| US20250123574A1 (en) | Actuator assemblies comprising piezo actuators or electrostrictive actuators | |
| JP2014120653A (ja) | 位置決め装置、リソグラフィー装置、それを用いた物品の製造方法 | |
| JP6363217B2 (ja) | 制御システム、位置決めシステム、リソグラフィ装置、制御方法、デバイス製造方法及び制御プログラム | |
| JP4386293B2 (ja) | 振動制御装置及び振動制御方法及び露光装置及びデバイスの製造方法 | |
| JP2014022467A (ja) | 露光装置、校正方法および物品の製造方法 | |
| JP6700680B2 (ja) | 支持装置、リソグラフィ装置、および物品の製造方法 | |
| JP2010522981A (ja) | 半導体アプリケーションの分割軸ステージ設計 | |
| JP6614880B2 (ja) | リソグラフィ装置および物品の製造方法 | |
| US9947508B2 (en) | Lithography apparatus, and method of manufacturing an article | |
| KR102592792B1 (ko) | 대상물 로딩 프로세스를 캘리브레이션하는 스테이지 장치 및 방법 | |
| KR102708128B1 (ko) | 검사 장치, 리소그래피 장치, 측정 방법 | |
| JP2010080861A (ja) | 転写装置及びデバイス製造方法 | |
| JP2017037102A (ja) | 支持装置、リソグラフィ装置、物品の製造方法、及び産業機械 | |
| CN113544587A (zh) | 物体定位器装置及装置制造方法 | |
| JP2025167911A (ja) | 露光装置、露光方法及び物品の製造方法 | |
| CN116157908A (zh) | 在光刻过程期间投影到物体上的标记和用于设计标记的方法 | |
| JP2013125790A (ja) | 保持装置、露光装置、およびデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180608 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191216 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200501 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6700680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |