JP6687984B2 - Open leg hydraulic excavator - Google Patents
Open leg hydraulic excavator Download PDFInfo
- Publication number
- JP6687984B2 JP6687984B2 JP2017094028A JP2017094028A JP6687984B2 JP 6687984 B2 JP6687984 B2 JP 6687984B2 JP 2017094028 A JP2017094028 A JP 2017094028A JP 2017094028 A JP2017094028 A JP 2017094028A JP 6687984 B2 JP6687984 B2 JP 6687984B2
- Authority
- JP
- Japan
- Prior art keywords
- center frame
- hydraulic excavator
- traveling
- cylinder
- traveling devices
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Body Structure For Vehicles (AREA)
Description
本発明は、履帯式の左右の走行装置の前部の間隔を広げて左右の走行装置をV字型に開脚し、左右の走行装置の前部の間の領域を掘削することができる開脚型油圧ショベルに関する。例えば深礎工法で深礎杭を挿し込む縦孔(深礎杭孔)の底部で走行体によって小刻みに位置を変えながら掘削作業をする開脚型油圧ショベルに係る。 According to the present invention, it is possible to widen the space between the front portions of the left and right crawler type traveling devices to open the left and right traveling devices in a V-shape, and to excavate the region between the front parts of the left and right traveling devices. Leg-type hydraulic excavator. For example, the present invention relates to an open leg hydraulic excavator for excavating work by changing the position in small increments by a traveling body at the bottom of a vertical hole (deep foundation pile hole) into which a deep foundation pile is inserted by the deep foundation method.
例えば山岳地の送電線等の鉄塔の建て替えの際に新しい鉄塔の深礎杭(基礎)を地中深く施工するような深礎工法では、深礎杭を挿し込むための小径の縦孔を掘削する。しかし山岳地における縦孔の掘削工事では搬入経路や広い足場が確保できず大掛かりな機械設備が使えないことが多い。そのような場合に、例えばヘリコプターで輸送することができる分解型のショベルや超小型の油圧ショベル等を用いることがある。分解型ショベルを現地で組み立てて地表から一定深さまで縦孔を掘削し、超小型の油圧ショベルをクレーン等で縦孔に投入し縦孔を掘り進めていく工法である。 For example, in the deep foundation method of constructing a deep foundation pile (foundation) of a new steel tower deep in the ground when rebuilding a steel tower such as a power transmission line in a mountainous area, a small diameter vertical hole for inserting the deep foundation pile is drilled. To do. However, in the excavation work of vertical holes in mountainous areas, it is often impossible to secure a carry-in route and a wide scaffolding, so that large-scale mechanical equipment cannot be used. In such a case, for example, a disassembled excavator or a micro hydraulic excavator that can be transported by a helicopter may be used. It is a method of assembling a disassembly type shovel on site and excavating a vertical hole from the surface to a certain depth, and then inserting a micro hydraulic excavator into the vertical hole with a crane to dig the vertical hole.
但し小径(例えば直径2.5m程度)の縦孔の内部では、いかに超小型の油圧ショベルであっても縦孔の底部に接地する自らの走行体が邪魔で実際に掘削できる領域は狭く、小刻みに走行体の位置や向きを変えなければならず効率的に作業を進めることができない。そこで特許文献1に記載されているように、履帯式の左右の走行装置の前側の間隔を開いてV字型に開脚し、これら左右の走行装置の間の領域を掘削することができる油圧ショベルがある。以下、この種の油圧ショベルを「開脚型油圧ショベル」と記載する。 However, inside a vertical hole with a small diameter (for example, a diameter of about 2.5 m), no matter how small the hydraulic excavator is, the area that can be actually excavated by its own moving body that touches the bottom of the vertical hole is small Since the position and direction of the traveling body must be changed, the work cannot be efficiently performed. Therefore, as described in Patent Document 1, a hydraulic pressure that allows the front and rear legs of the crawler belt type left and right traveling devices to open in a V-shape and excavates a region between these left and right traveling devices. I have a shovel. Hereinafter, this type of hydraulic excavator will be referred to as an "open leg hydraulic excavator".
特許文献1に記載された開脚型油圧ショベルは、左右の走行装置をトラックフレームのセンタフレームに対してそれぞれリンクを介して連結し、左右のリンクを連結した1本の油圧シリンダで左右の走行装置を開脚させる構成である。例えば機体の後傾抑制のためにアウトリガーをセンタフレームの後部に設けた場合、アウトリガーが接地してセンタフレームが地面に固定された状態で油圧シリンダを伸長させると、走行装置の開脚動作に左右でバラつきが生じ得る。例えば右側の走行装置が地面に引っ掛かって拘束されていると、シリンダの伸長に伴って動作抵抗の低い左側の走行装置のみが開いてしまう。このように左右の走行装置で開脚角度に差が生じると一方の走行装置が過度に開脚し、上記のように後部にアウトリガーを設けた場合には一方の走行装置がアウトリガーに干渉する可能性がある。 The open-leg hydraulic excavator described in Patent Document 1 connects left and right traveling devices to the center frame of a truck frame via links, and travels left and right with a single hydraulic cylinder that connects the left and right links. This is a configuration in which the device is opened. For example, when an outrigger is installed in the rear part of the center frame to suppress the rearward leaning of the machine, extending the hydraulic cylinder with the outrigger touching the ground and the center frame being fixed to the ground will cause left and right leg movements of the traveling device. Can cause variations. For example, when the right traveling device is caught on the ground and is restrained, only the traveling device on the left side, which has a low operation resistance, opens as the cylinder extends. In this way, when there is a difference in the leg angle between the left and right traveling devices, one of the traveling devices opens the legs excessively, and when the rear outrigger is provided as described above, one of the traveling devices may interfere with the outriggers. There is a nature.
本発明の目的は、履帯式の左右の走行装置の前部の間隔を拡大してV字型に開脚する開脚型油圧ショベルにおいて一方の走行装置が過度に開脚することを抑制することである。 An object of the present invention is to prevent the travel of one traveling device from being excessively opened in an open-leg hydraulic excavator in which the distance between the front portions of the left and right traveling devices of the crawler belt type is enlarged and the legs are opened in a V-shape. Is.
上記目的を達成するために、本発明は、走行体、前記走行体の上部に旋回可能に設けた旋回体、前記旋回体に取り付けた作業機、前記作業機を駆動する油圧アクチュエータ、前記油圧アクチュエータを駆動する圧油を吐出する油圧ポンプ、及び前記油圧ポンプを駆動する原動機を備え、前記走行体が、前記旋回体を支持するセンタフレーム、前記センタフレームに対して回動可能に連結されて互いの前部の間隔を拡大してV字型に開脚可能な左右の走行装置、前記センタフレームと前記左右の走行装置をそれぞれ連結する左右のリンク、及び前記左右のリンクを連結し前記左右の走行装置を開脚及び閉脚させるシリンダを備えた開脚型油圧ショベルにおいて、前記センタフレームの上面板及び下面板の間に配置され、前記左右のリンク又は前記シリンダに設けた連結ピンを通した長穴を有する左右のストッパと、前記センタフレームの左右両側部分に設けられて前記左右のストッパを水平方向に回動可能に支持する左右の支軸を備えており、前記ストッパの長穴で前記連結ピンを拘束することで、前記左右の走行装置の最大開脚角度が個々に制限してあることを特徴とする。 In order to achieve the above object, the present invention provides a traveling body, a revolving structure provided on the traveling structure so as to be rotatable, a working machine attached to the revolving structure, a hydraulic actuator for driving the working machine, and the hydraulic actuator. A hydraulic pump that discharges pressure oil that drives the hydraulic pump, and a prime mover that drives the hydraulic pump, wherein the traveling body is a center frame that supports the revolving structure, and the traveling frame is rotatably connected to the center frame. Of the left and right running devices that can open the legs in a V-shape by expanding the front part of the vehicle, left and right links that respectively connect the center frame and the left and right running devices, and the left and right links that connect the left and right links. In an open-leg hydraulic excavator including a cylinder that opens and closes a traveling device, the excavator is disposed between an upper surface plate and a lower surface plate of the center frame and has the left and right links or the front plate. The cylinder is provided with left and right stoppers having elongated holes through which connecting pins are passed, and left and right support shafts provided on both left and right side portions of the center frame for horizontally rotatably supporting the left and right stoppers. The maximum opening angle of each of the left and right traveling devices is individually limited by restraining the connecting pin with the elongated hole of the stopper.
本発明によれば、履帯式の左右の走行装置の前部の間隔を拡大してV字型に開脚する開脚型油圧ショベルにおいて一方の走行装置が過度に開脚することを抑制することができる。これにより後部にアウトリガー等を設けてもこれに走行装置が干渉することを抑制することができる。 ADVANTAGE OF THE INVENTION According to this invention, in the open-leg type hydraulic excavator which widens the space | interval of the front part of a crawler-type left and right traveling device, and suppresses one traveling device from excessively opening a leg. You can Thus, even if an outrigger or the like is provided on the rear portion, it is possible to prevent the traveling device from interfering with the outrigger.
以下に図面を用いて本発明の実施の形態を説明する。 Embodiments of the present invention will be described below with reference to the drawings.
1.開脚型油圧ショベル
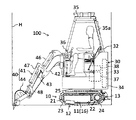
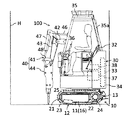
図1及び図2は本発明の一実施形態に係る開脚型油圧ショベルの全体構成を表す側面図である。なお、図1はアタッチメントとしてバケットを装着した開脚型油圧ショベルを、図2はアタッチメントとしてブレーカを装着した開脚型油圧ショベルを表している。以下の説明において特に断りなく「油圧ショベル」と記載した場合には開脚型油圧ショベルを指すこととする。また図1における油圧ショベル100の運転席の前方(同図では左)を前方とする。
1. Open Leg Hydraulic Excavator FIGS. 1 and 2 are side views showing the overall configuration of an open leg hydraulic excavator according to an embodiment of the present invention. Note that FIG. 1 shows an open leg hydraulic excavator with a bucket attached as an attachment, and FIG. 2 shows an open leg hydraulic excavator with a breaker attached as an attachment. In the following description, the term "hydraulic excavator" is used to refer to an open leg hydraulic excavator unless otherwise specified. The front side (left side in the figure) of the driver's seat of the
油圧ショベル100は例えば深礎工法で深礎杭(不図示)を挿し込む縦孔(深礎杭孔)Hに投入され、縦孔の底部で走行体によって小刻みに位置を変えながら掘削作業をし、縦孔を掘り進める作業機械である。この油圧ショベル100は、走行体10、旋回体30及び作業機(フロント作業機)40を備えている。
The
2.走行体
走行体10は油圧ショベル100が自力走行するための履帯式(クローラ式)の走行体であり、トラックフレーム11、左右の走行装置12及びアウトリガー13を備えている。トラックフレーム11は走行体10のフレームをなすもので、センタフレーム14(図3)、左右のリンク15(図3)及び左右のサイドフレーム16からなり、閉脚時に平面視でH型になるように形成されている。センタフレーム14の後部(図1では右側部分)に上記アウトリガー13が設けられている。掘削作業の邪魔になり得るためセンタフレーム14の前部にアウトリガーは設けられておらず、アウトリガー13は後部にのみ設けられている。アウトリガー13は図示しないシリンダによって上下に揺動し、場面に応じて高さを調節することで作業中における油圧ショベル100の後傾を抑制することができる。トラックフレーム11の構成の詳細については後述する。
2. The
左右の走行装置12は、従動輪21、駆動輪22、履帯(クローラ)23及び走行モータ24を備えている。従動輪21はトラックフレーム11の左右のサイドフレーム16の各前端(図1では左端)に、駆動輪22は左右のサイドフレーム16の各後端(図1では右端)にそれぞれ回転自在に支持されている。トラックフレーム11の左右のサイドフレーム16は、それぞれ左右の走行装置12のフレームを兼ねる。履帯23は左右の走行装置12においてそれぞれ従動輪21及び駆動輪22に掛け回されている。また左右の走行装置12においてそれぞれ駆動輪22の回転軸に走行モータ24の出力軸が連結されている。走行モータ24が駆動されると従動輪21と駆動輪22に掛け回された履帯23が循環駆動され、油圧ショベル100の走行動作等が行われる。走行モータ24は油圧モータである。本実施形態の油圧ショベル100の場合、小径の縦孔Hの底部で動き回る都合上、走行装置12の長手方向の長さ(少なくともサイドフレーム16の長さ)は一般的な油圧ショベルよりも短く、旋回体30の前後方向の長さと同程度かそれよりも短い。特に本実施形態においては、左右の走行装置12が平行な状態では(図5に示したような閉脚時には)平面視で左右の走行装置12の車幅方向の外側の辺がほぼ正方形の対辺となるように走行装置12の間隔や長さが調整されている。これにより短い走行装置12ながら安定性が確保されている。
The left and right
3.旋回体
旋回体30は、旋回フレーム(不図示)、運転席32、カウンタウェイト33及び機械室34等を備えている。旋回フレームは旋回体30のベースフレームであり、旋回輪25を介してトラックフレーム11(センタフレーム14)の上部に設けられている。旋回フレームには旋回輪25の付近に旋回モータ(不図示)が搭載されており、旋回モータの出力軸が旋回輪25に設けた歯車と噛み合うことで、走行体10に対して旋回体30が鉛直軸周りに旋回する。旋回モータには電動モータを用いることもできるが、本実施形態では油圧モータが用いてある。
3. Revolving structure The revolving
運転席32は旋回体30の旋回中心に対して左右方向の一方側(本実施形態では左側)にオフセットした位置に配置されている。この運転席32の上側はキャノピー35で覆われている。また旋回フレームの前部には運転席32の前側に位置するように操作装置36が配置されている。操作装置36は、作業機40や走行体10、旋回体30の動作を指示するレバー装置やペダル類等の複数の操作装置である。カウンタウェイト33は作業機40との重量のバランスをとるための錘であり、旋回フレームの後端に設けられている。本実施形態におけるカウンタウェイト33は機械室34のカバー(外壁)と一体に形成されており(カバーを兼ねており)、機械室34に収容された各機器を覆っている。また油圧ショベル100は超小型であり、キャノピー35を支持する支柱のうち旋回体30の後部に配置された支柱35aはカウンタウェイト33又はその上のカバー(不図示)の上部から立ち上がり、旋回体30の後端付近に位置する。
The driver's
図示していないが、機械室34には、電動機37の他、油圧ポンプや冷却ファン、バルブユニット、作動油タンク、燃料タンク、コントローラ38等が収容されている。電動機37は油圧ポンプを駆動する原動機であり、例えば油圧ショベル100とは別置きの発電機からケーブル(不図示)を介して供給される電力で駆動される。但し、外部電源からの電力供給を受ける構成ではなく、機械室34に電源(発電機、バッテリ等)を搭載する構成としても良い。電動機37によって駆動された油圧ポンプは、作動油タンクの作動油を吸い込んで圧油として吐出する。油圧ポンプから吐出された圧油は、操作装置36の操作に応じて作動するバルブユニットによって制御されて対応する油圧アクチュエータに供給される。コントローラ38は電装品を制御する制御装置である。なお、本実施形態の油圧ショベル100は図1に示したように超小型であり、コントローラ38及び電動機37を運転席32の下部に上下に並べて配置する等、機械室34の収容機器のレイアウトを立体的に工夫することで旋回体30を極めて小径に構成してある。本実施形態では電動機37より上側にコントローラ38を配置してある。特には図示していないが、運転席32は前部を支点として後部が上下に回動する構造になっており、運転席32の後部を持ち上げて傾斜させるとコントローラ38の上側が開放され、コントローラ38にアクセスできるようになっている。
Although not shown, the
4.作業機
作業機40は作業腕41及びアタッチメントである作業具44を含む多関節型のフロント作業機であり、旋回体30に取り付けられている。作業腕41は、ブーム42、アーム43、ブームシリンダ(不図示)、アームシリンダ46及び作業具シリンダ47を備えている。ブーム42は旋回体30の前部に回動可能に連結され、アーム43はブーム42の先端に、作業具44はアーム43の先端に、それぞれ回動可能に連結されている。ブーム42、アーム43及び作業具44はいずれも左右に水平に延びる回転軸を支点にして回動する。図1では作業具44としてバケットを、図2では作業具44としてブレーカを装着した例を表しているが、他のアタッチメントも装着可能である。また、ブームシリンダは旋回体30及びブーム42に、アームシリンダ46はブーム42及びアーム43に、それぞれ両端が連結されている。作業具シリンダ47は、基端がアーム43に連結される一方、先端がリンク48を介してアーム43の先端部及び作業具44に連結されている。ブームシリンダ、アームシリンダ46及び作業具シリンダ47はいずれも油圧アクチュエータであり、油圧ポンプから吐出される圧油で駆動され、伸縮動作により作業機40を駆動する。
4. Working Machine The working
5.トラックフレーム
図3は図1及び図2に示した油圧ショベルの走行体の平面図、図4はセンタフレームの左側の部分を前方から見た図である。図3においては、左右の走行装置12の前部の間隔を広げ(後部の間隔を狭め)、左右の走行装置12をV字型に開脚した状態を表している。また構造の明確化のため、センタフレームにおける上記旋回輪25が取り付けられる上面板52(図4)は図示省略してある。前述したように、トラックフレーム11は、センタフレーム14、リンク15及びサイドフレーム16(図1、図2)を備えている。
5. Track Frame FIG. 3 is a plan view of the traveling body of the hydraulic excavator shown in FIGS. 1 and 2, and FIG. 4 is a view of the left side portion of the center frame as seen from the front. FIG. 3 shows a state in which the front part of the left and right traveling
センタフレーム14はトラックフレーム11のメインフレームであり、左右両側にリンク15及びサイドフレーム16が連結される他、上部には旋回体30が支持されている。このセンタフレーム14は、下面板51、上面板52(図4)、前面板53、後面板54、左側面板55及び右側面板56を備えている。前面板53、後面板54、左側面板55及び右側面板56は鉛直に起立した板状部材である。センタフレーム14は、前面板53、後面板54、左側面板55及び右側面板56をそれぞれ前後左右の面とする四角い枠を水平な下面板51及び上面板52で上下から挟んだような構成である。下面板51、上面板52、前面板53、後面板54、左側面板55及び右側面板56は、接触するもの同士が溶接等で固定されている。
The
左右のリンク15はセンタフレーム14の下面板51及び上面板52の間の高さに配置されており、それぞれ第1アーム58及び第2アーム59を備えている。第1アーム58は、上下に延びる回転軸61を介して基端部がセンタフレーム14の下面板51及び上面板52に対し連結されており、回転軸61を中心にセンタフレーム14に対して水平面に沿って回動可能である。左右のリンク15の回転軸61は、センタフレーム14の前部の左右にそれぞれ位置している。第2アーム59は、上下に延びる回転軸62を介して基端部が第1アーム58の先端部に対し連結されており、回転軸62を中心に第1アーム58に対して水平面に沿って回動可能である。第2アーム59の先端部は上下に延びる回転軸63を介して、トラックフレーム11のサイドフレーム16(図1等)の前部から車幅方向の内側に突出したブラケット64に対し連結されている。従って第2アーム59は回転軸63を支点にサイドフレーム16に対しても水平面に沿って回動可能である。また左右のサイドフレーム16の後部には、車幅方向の内側に突出したブラケット65がそれぞれ設けられている。ブラケット65はセンタフレーム14の下面板51及び上面板52の間の高さに配置されており、上下に延びる回転軸66を介して下面板51及び上面板52に対し連結され、回転軸66を中心にセンタフレーム14に対して水平面に沿って回動可能である。これら回転軸66は、センタフレーム14の後部の左右にそれぞれ位置している。センタフレーム14の左右両側において回転軸61より前側の位置と回転軸66より前側の位置には、それぞれ補強板68が設けられている。これら4枚の補強板68は左右に延びる鉛直に起立した部材であり、下面板51と上面板52とを連結している。
The left and
上記の通り左右の走行装置12の後部はサイドフレーム16のブラケット65が直接センタフレーム14に連結される一方、左右の走行装置12の前部はサイドフレーム16のブラケット64がリンク15を介してセンタフレーム14に連結されている。これにより左右の走行装置12は、回転軸66を中心にして水平方向に回動し、互いの前部の間隔を拡大すると共に後部の間隔を狭めるようにしてV字型に開脚することができるようになっている。
As described above, the
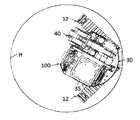
また、左右のリンク15の回転軸62は1本のシリンダ67で連結されている。シリンダ67は左右に延び、センタフレーム14の左側面板55及び右側面板56に設けた開口を通して配置してある。下面板51及び上面板52の左右方向の寸法は、最大限伸長したシリンダ67の全部又は大部分の上下をカバーする程度に設定されている。このシリンダ67が伸縮することによって、左右の走行装置12が図3に示したようにV字型に開脚したり閉脚したりする(左右の走行装置12が共に前後に延びて互いに平行な状態になる)。縦孔Hの底部で閉脚して作業する油圧ショベル100の様子を表す平面図を図5に、縦孔Hの底部で開脚して作業する油圧ショベル100の様子を表す平面図を図6に示した。
The
6.ストッパ
センタフレーム14の下面板51及び上面板52の間にはストッパ70が配置されている。左右のストッパ70は棒状で水平な平板状の部材であり、連結ピンを通す長穴72を備えている。長穴72はストッパ70の長手方向に延び、上下に開口している。長穴72に通る連結ピンには、本実施形態では左右のリンク50とシリンダ67とを連結する上記回転軸62が用いてある。これらストッパ70は、上記回転軸66とは別個に設けた左右の支軸71によってそれぞれセンタフレーム14に水平方向に回動可能に連結されている。左右の支軸71は上下に延び、上部がセンタフレーム14の上面板52に、下部が後述する補強板68に設けたブラケット69(図3)に支持されている。但し、支軸71を延ばしてセンタフレーム14の上面板52及び下面板51を貫通させ、支軸71の上下を上面板52及び下面板51で支持する場合にはブラケット69は省略可能である。また左右の支軸71はセンタフレーム14の後部における左右両側部分において回転軸66よりは前側に位置し、回転軸66との間が上記補強板68で隔てられている。
6.
このような構成で、本実施形態においてはストッパ70の長穴72で回転軸62を拘束することにより、左右の走行装置12の最大開脚角度が個々に制限されるようになっている。本実施形態では左右の走行装置12の個別の最大開脚角度はセンタフレーム14の前後に延びる中心線に対して約45度であり、左右の走行装置12の相対的な最大開脚角度が約90度としてある。これにより図3に示したように左右の走行装置12を最大限開脚しても走行装置12がアウトリガー13に干渉しないようになっている。またアウトリガー13の接地部も最大開脚時の左右の走行装置12の後縁に併せて直角三角形状に形成されている。
With such a configuration, in the present embodiment, the maximum opening angle of the left and right traveling
7.動作
山岳地で鉄塔の深礎杭孔として縦孔Hを掘削する場合、例えば現地で組み立てた分解型油圧ショベルで地表面から一定の深さまで縦孔Hを掘削し、その後クレーン等で油圧ショベル100を縦孔Hの内部に投入する。油圧ショベル100を操作する際、オペレータは運転席32に座って操作装置36を適宜操作する。これにより走行体10によって油圧ショベル100を移動させたり、作業機40によって掘削作業をしたり旋回体30を旋回させたりすることができる。掘削作業は、例えば図1に示したように作業具44としてバケットを用いて縦孔Hの底部を掘削したり、必要に応じて図2のように作業具44としてブレーカを用いて縦孔Hの底面の岩盤を破砕したりする。掘削した土砂や礫等はバケットで掬って別途用意した容器に積み込み、クレーン等で容器を吊り上げて縦孔Hの外に運び出す。
7. Operation When excavating the vertical hole H as a deep foundation pile hole of a steel tower in a mountainous area, for example, the disassembly type hydraulic excavator assembled on site excavates the vertical hole H to a certain depth from the ground surface, and then the
例えば開脚して左右の走行装置12の間の領域を掘削する必要がある場合、運転席32でオペレータは適宜操作をしてシリンダ67を伸長させる。その際、左右の走行装置12の開脚動作の動作抵抗に偏りがなければ、シリンダ67の伸長に伴って双方の走行装置12が回動し、図3や図6に示したように左右対称に開脚する。しかし左右の走行装置12で開脚の動作抵抗に偏りがある場合には、相対して動作抵抗の小さい方の走行装置12が先行して開くことになる。その場合の動作について次に説明する。
For example, when it is necessary to open the legs and excavate the region between the left and right traveling
図7は左右の走行装置で開脚の動作抵抗が異なり右側の走行装置のみが開いた状態の走行体10の平面図、図8はその状態の油圧ショベル100の平面図である。図7は図3、図8は図5及び図6に対応する図である。図7及び図8の例では、例えば左側の走行装置12が地面に引っ掛かり右側の走行装置12よりも開脚動作の動作抵抗が大きい状態であるとする。先の図5のように左右の走行装置12が閉脚した状態では、回転軸62は自己の移動範囲において車幅方向の最も内側に位置している。図7の例では左側の走行装置12に関して示したように、閉脚時は回転軸61,66と前後に並ぶ位の位置に回転軸62が位置する。この状態からシリンダ67を伸ばしていくと開脚の動作抵抗が低い右側の走行装置12の回転軸62が車幅方向の外側に移動し、ストッパ70が長穴72で回転軸62と係り合いながら車幅方向の外側に回動する。ストッパ70の長穴72の端部(支軸71と反対側の端部)に回転軸62が到達すると、ストッパ70によって回転軸62が拘束される。こうして右側の走行装置12が開脚しきった状態では、左側の走行装置12が開脚しきっておらずシリンダ67の伸び代がまだ残っていても、それ以上右側の走行装置12が開脚することがない。その後更にシリンダ67が伸長すれば、右側の走行装置12が拘束されたことで動作抵抗の大小関係が逆転して小さくなった左側の走行装置12が開脚し、最終的に図3等に示したように左右の走行装置12が最大角度まで開脚する。
FIG. 7 is a plan view of the traveling
8.効果
(1)本実施形態によれば、まず走行装置12をV字型に開脚することができるので、開脚して左右の走行装置12の間を掘削したり左右の履帯23を逆回転させることで縦孔Hの底部で円弧状に横移動したりすることができる。従って狭隘な縦孔Hの中でも小回りが利き、掘削箇所から適度な距離がとれない場合でも旋回体30の前部の下方まで掘削できるので効率良く作業を進めることができる。
8. Effects (1) According to the present embodiment, first, the traveling
このとき、超小型の油圧ショベル100においては走行体10も小さく、センタフレーム14に対して左右の走行装置12を個別にシリンダで連結する(つまり左右の走行装置12にそれぞれ専用のシリンダを設ける)構成とするだけのレイアウト上の余裕がない。1本のシリンダ67で左右の走行装置12を開脚する構造であるため、例えば右側の走行装置が地面に引っ掛かって拘束されていると先に説明したようにシリンダの伸長に伴って動作抵抗の低い左側の走行装置のみが開いてしまう。このように左右の走行装置12で開脚角度に差が生じると一方の走行装置12が過度に開脚し、後部に設けたアウトリガー13に一方の走行装置12が干渉する可能性がある。
At this time, in the ultra-compact
そこで本実施形態では左右の走行装置12の開脚角度を個別に制限するストッパ70を設けた。これにより履帯式の左右の走行装置12の前部の間隔を拡大してV字型に開脚する開脚型油圧ショベル100にあって一方の走行装置12が過度に開脚することを抑制することができる。これにより後部に設けたアウトリガー13等に走行装置12が干渉することを抑制することができる。
Therefore, in the present embodiment, the
(2)センタフレーム14の構造強度を確保するために、上記補強板68のような部材が適宜必要になる。仮に回転軸66によってストッパ70をセンタフレーム14に連結する構成とした場合、センタフレーム14の下面板51及び上面板52の間にストッパ70を配置しようとすると、回転軸62,66に係り合うストッパ70は補強板68に干渉してしまう。そこでセンタフレーム14の上面板52から上に回転軸66を延ばして上面板52より上側にストッパ70を配置した場合、ストッパ70と補強板68の干渉は避けられるが、その場合回転軸62が上面板52に干渉してしまう。またストッパ70をセンタフレーム14の上側に配置すると、回転軸62の移動を許容するために上面板52を切り欠かなければならなくなり、センタフレーム14の構造強度を低下させてしまう。センタフレーム14の下面板51から下に回転軸66を延ばして下面板51より下側にストッパ70を配置した場合も同様である。特にセンタフレーム14の下側にストッパを配置した場合、切り欠かれて下面板51の面積が減少するとその分、作業中に地面から跳ね上がる礫等からシリンダ67等を下面板51で保護する観点でも構造的に不利になる。
(2) In order to secure the structural strength of the
そこで本実施形態では回転軸66とは別個に支軸71を設け、専用の支軸71でストッパ70を支持する構成とすることで、補強板68との干渉を避けてセンタフレーム14の下面板51及び上面板52の間にストッパ70を配置することができる。これにより下面板51や上面板52を切り欠く必要がなく、センタフレーム14の強度やシリンダ67の保護機能の低下を抑制することができる。
Therefore, in the present embodiment, the
(3)左右のリンク15の第1アーム58及び第2アーム59を連結する回転軸62でストッパ70の長穴72に通す連結ピンを兼ねているので、構成を簡素化でき、部品点数も抑えられる。
(3) Since the rotating
(4)本実施形態では左右の走行装置12を直接シリンダ67で連結するのではなく、左右のリンク15をシリンダ67で連結している。これによりシリンダ67の伸縮動作を効率良く走行装置12の回動運動に変換することができ、シリンダ67の長さやストロークも抑えられる。
(4) In this embodiment, the left and right traveling
9.変形例
以上の実施形態では、上記効果(2)を得るために走行装置12の回動支点である回転軸60とは別に専用の支軸71でストッパ70をセンタフレーム14に連結する構成としたが、本質的な上記効果(1)を得る限りにおいては必ずしもこの構成に限定されない。例えば補強板68がなくてもセンタフレーム14の構造強度が十分に確保できる場合等には、回転軸66でストッパ70をセンタフレーム14に連結する構造としても良い。また上記効果(3)を得るためにストッパ70の長穴72に通す連結ピンをリンク15の回転軸62で兼ねる構成を例示したが、連結ピンはシリンダ67の伸縮に伴って移動すれば良い。従って左右のリンク15の他の部位(例えば第1アーム58や第2アーム59)又はシリンダ67の他の部位(例えばチューブやロッドの端部)に回転軸62とは別に設けた専用の連結ピンを長穴72に通した構成としても良い。
9. Modifications In the above embodiment, in order to obtain the above effect (2), the
また設置可能であればシリンダ67は複数本あっても良い。この場合、左右の走行装置12を別々のシリンダで個別に回動させる構造とすることもできるが、複数のシリンダを連結しストローク量を増大させたシリンダユニットを上記シリンダ67に代えることも考えられる。
Further, if it can be installed, there may be a plurality of
また油圧ポンプを駆動する原動機として電動機37を搭載した油圧ショベル100に発明を適用する場合を例示して説明した。しかし油圧ショベル100が遠隔操作可能な場合、或いは稼働現場で排気ガスが問題にならないような場合等には、電動機37に代えてエンジン(内燃機関)を原動機として用いても良い。
Further, the case where the invention is applied to the
10…走行体、12…走行装置、14…センタフレーム、15…リンク、30…旋回体、37…電動機(原動機)、40…作業機、46…アームシリンダ(油圧アクチュエータ)、47…作業具シリンダ(油圧アクチュエータ)、51…下面板、52…上面板、62…回転軸(連結ピン)、67…シリンダ、70…ストッパ、71…支軸、72…長穴、100…開脚型油圧ショベル
DESCRIPTION OF
Claims (3)
前記センタフレームの上面板及び下面板の間に配置され、前記左右のリンク又は前記シリンダに設けた連結ピンを通した長穴を有する左右のストッパと、
前記センタフレームの左右両側部分に設けられて前記左右のストッパを水平方向に回動可能に支持する左右の支軸を備えており、
前記ストッパの長穴で前記連結ピンを拘束することで、前記左右の走行装置の最大開脚角度が個々に制限してあることを特徴とする開脚型油圧ショベル。 A traveling body, a revolving structure provided on the traveling structure so as to be revolvable, a working machine attached to the revolving structure, a hydraulic actuator for driving the working machine, a hydraulic pump for discharging pressure oil for driving the hydraulic actuator, and A center frame that supports the revolving structure, and includes a prime mover that drives the hydraulic pump, and the traveling structure is rotatably connected to the center frame so that a space between front portions of the traveling structure is enlarged to form a V-shape. And left and right traveling devices capable of opening legs, left and right links respectively connecting the center frame and the left and right traveling devices, and a cylinder for connecting the left and right links to open and close the left and right traveling devices. In open leg hydraulic excavator,
Left and right stoppers that are arranged between the upper and lower plates of the center frame and that have elongated holes through which the connecting pins provided on the left and right links or the cylinder are inserted,
The center frame includes left and right support shafts that are provided on both left and right sides of the center frame and support the left and right stoppers so as to be horizontally rotatable.
An open leg hydraulic excavator, wherein the maximum open leg angle of each of the left and right traveling devices is individually limited by restraining the connecting pin with the elongated hole of the stopper.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017094028A JP6687984B2 (en) | 2017-05-10 | 2017-05-10 | Open leg hydraulic excavator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017094028A JP6687984B2 (en) | 2017-05-10 | 2017-05-10 | Open leg hydraulic excavator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018188908A JP2018188908A (en) | 2018-11-29 |
| JP6687984B2 true JP6687984B2 (en) | 2020-04-28 |
Family
ID=64478118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017094028A Active JP6687984B2 (en) | 2017-05-10 | 2017-05-10 | Open leg hydraulic excavator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6687984B2 (en) |
-
2017
- 2017-05-10 JP JP2017094028A patent/JP6687984B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018188908A (en) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012153638A1 (en) | Construction machine | |
| JP4414355B2 (en) | Construction machine earth removal equipment | |
| KR20160052390A (en) | Working machine | |
| JP6734223B2 (en) | Hydraulic excavator | |
| JP6687984B2 (en) | Open leg hydraulic excavator | |
| JP5625013B2 (en) | Construction machinery | |
| JP6719116B2 (en) | Work machine | |
| JP2018188813A (en) | Leg opening type hydraulic shovel | |
| JP2017214033A (en) | Working machine | |
| JP2004183312A (en) | Piling apparatus | |
| CN112135945A (en) | Rotary working vehicle | |
| JP2020076270A (en) | Hydraulic shovel | |
| JP6884732B2 (en) | Remote-controlled small hydraulic excavator | |
| JP6998337B2 (en) | Open leg hydraulic excavator | |
| JP2023080727A (en) | Construction machine | |
| JP7141990B2 (en) | excavator | |
| JP2019203333A (en) | Construction machine | |
| JP3806054B2 (en) | Wheeled work machine | |
| JP7091206B2 (en) | Work vehicle | |
| JP6359496B2 (en) | Construction machinery | |
| JP6884733B2 (en) | Remote-controlled small hydraulic excavator | |
| JP2003285650A (en) | Wheel type work machine | |
| JP2021139155A (en) | Position determination device | |
| US10392773B2 (en) | Linkage assembly for machine | |
| JP2024142486A (en) | Construction Machinery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200317 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200402 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6687984 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |