JP6686249B2 - 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 - Google Patents
船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 Download PDFInfo
- Publication number
- JP6686249B2 JP6686249B2 JP2016255455A JP2016255455A JP6686249B2 JP 6686249 B2 JP6686249 B2 JP 6686249B2 JP 2016255455 A JP2016255455 A JP 2016255455A JP 2016255455 A JP2016255455 A JP 2016255455A JP 6686249 B2 JP6686249 B2 JP 6686249B2
- Authority
- JP
- Japan
- Prior art keywords
- virtual
- ship
- course
- movement
- tracking target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 29
- 238000004364 calculation method Methods 0.000 claims description 19
- 230000001737 promoting effect Effects 0.000 claims 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 13
- 238000004891 communication Methods 0.000 description 4
- 238000011160 research Methods 0.000 description 4
- 239000000446 fuel Substances 0.000 description 3
- 230000002250 progressing effect Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/02—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring
- B63H25/04—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring automatic, e.g. reacting to compass
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
- G08G3/02—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Ocean & Marine Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
Description
また、仮想座標平面としては、操作パネル面上や数値計算用の面等の実際の地形図と相似関係にある地形図面等の目視できる図形が好ましいが、必ずしも、目視できるものでなくて、計算上で同じ操作や算出ができれば、目視できる図形を伴っていなくてもよい。その意味でここでは「仮想座標平面」という言い方を採用している。
2 追尾対象体
2v 仮想追尾対象体
10 船舶の自動操縦システム
20 図形追跡自動操船手段
21 コース設定手段
22 移動地点設定手段
23 移動開始時点算出手段
23a クロス判定手段
23b チェック領域判定手段
23c グリッド判定手段
24 自動操船手段
25 移動待機手段
26 定位置保持手段
27 終了判定手段
28A コース逸脱警報手段
28B チェック領域逸脱警報手段
29 移動地点設定手段
30 操縦制御装置
31a 左舷側推進器
31b 左舷側舵
31 左舷側推進システム(推進システム)
32a 右舷側推進器
32b 右舷側舵
32 右舷側推進システム(推進システム)
40 入力装置
41 移動情報入力部
42 旋回情報入力部
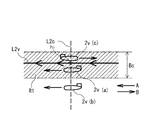
α 真方位
β 相対方位
θ 針路
Dv 仮想離間距離
L2 追尾対象体の運用コース
L2v 仮想コース
Pp 追尾対象体の位置
Ppv 仮想追尾対象体の仮想位置
Claims (12)
- 追尾対象体の動きに従って自船を自動操船する船舶の自動操縦システムにおいて、
前記追尾対象体を運用するコースに対応する仮想追尾対象体の仮想コースを前記仮想座標平面上に設けるコース設定手段と、
予め設定された前記仮想コースに対しての図形的な第1条件を満たす仮想移動地点を設定する移動地点設定手段と、
前記追尾対象体の位置を検出して、前記仮想座標平面上に前記仮想追尾対象体の仮想位置を描き、前記仮想位置が予め設定された前記仮想コースに対しての図形的な第2条件を満たすときを移動開始時点とする移動開始時点算出手段と、
この移動開始時点となったときに移動許可信号の入力を得て若しくは移動許可信号の入力を得ることなく、前記仮想移動地点に対応する実際の移動地点に向かって自船を移動する自動操船を行う自動操船手段を有する図形追跡自動操船手段を備えて構成されていることを特徴とする船舶の自動操縦システム。 - 前記移動開始時点算出手段が、前記仮想座標平面上において、前記仮想コースに直交若しくは斜交する仮想クロスラインと、この仮想クロスラインを横切る横切り方向を設定し、
前記仮想追尾対象体が前記仮想クロスラインを前記横切り方向に横切った時点を前記移動開始時点とするクロス判定手段を備えて構成されていることを特徴とする請求項1に記載の船舶の自動操縦システム。 - 前記移動開始時点算出手段が、前記追尾対象体を運用するコースに対応する仮想追尾対象体の仮想コースを前記仮想座標平面上に設けて、この仮想コース上に予めチェック領域を設けて、
仮想追尾対象体が前記チェック領域を通過した時点を前記移動開始時点とするチェック領域判定手段を備えて構成されていることを特徴とする請求項1または2に記載の船舶の自動操縦システム。 - 前記移動開始時点算出手段が、前記仮想座標平面上において、予め等間隔のラインを設定して、前記ラインで囲まれたマス目を設けると共に、前記仮想コース上を進む前記仮想追尾対象体が通過するマス目の数を積算した積算数が予め設定された設定数に達した時点を前記移動開始時点とするグリッド判定手段を備えて構成されていることを特徴とする請求項1〜3のいずれか1項に記載の船舶の自動操縦システム。
- 前記図形追跡自動操船手段が、前記移動開始時点になったときに、自船の移動を促す移動通報を発生し、移動許可信号の入力を得てから前記仮想移動地点に対応する実際の移動地点に向かって自船を移動し、移動許可信号の入力を得るまでは、自船の移動を開始しない制御をする移動待機手段を備えて構成されていることを特徴とする請求項1〜4のいずれか1項に記載の船舶の自動操縦システム。
- 前記図形追跡自動操船手段が、自船を前記仮想移動地点に対応する実際の移動地点に移動してから、次の前記移動開始時点になるまで、自船を予め設定される定位置領域内に位置保持する定位置保持制御を行う定位置保持手段を備えて構成されていることを特徴とする請求項1〜5のいずれか1項に記載の船舶の自動操縦システム。
- 上記の船舶の自動操縦システムにおいて、前記図形追跡自動操船手段が、前記仮想コースの終点において、仮想終了判定領域を設けて、この仮想終了判定領域に前記仮想追尾対象体の前記仮想位置が入ったときに、制御を終了する終了判定手段を備えて構成されていることを特徴とする請求項1〜6のいずれか1項に記載の船舶の自動操縦システム。
- 前記図形追跡自動操船手段が、前記仮想コースの周囲にコース運用領域を設けて、このコース運用領域から前記仮想追尾対象体の前記仮想位置が逸脱した場合に、コース逸脱警報を発生するコース逸脱警報手段を備えて構成されていることを特徴とする請求項1〜7のいずれか1項に記載の船舶の自動操縦システム。
- 前記図形追跡自動操船手段が、前記仮想コースの上にチェック領域を設けて、このチェック領域を逸脱して航行した場合に、チェック領域逸脱警報を発生するチェック領域逸脱警報手段を備えて構成されていることを特徴とする請求項1〜8のいずれか1項に記載の船舶の自動操縦システム。
- 前記仮想コースの最初の移動開始時点に対応する仮想追尾対象体の仮想移動開始位置に対して入力された自船の仮想入力位置と、真方位、相対方位若しくは針路を用いて、前記仮想移動開始位置と前記仮想入力位置との間の仮想離間距離を算出し、これらの入力値と算出値を用いて、自船の設定真方位、設定相対方位若しくは針路、設定仮想離間距離と、2番目以降の移動開始時点に対応する自船の仮想入力位置を設定する移動地点設定手段を備えて構成されていることを特徴とする請求項1〜8のいずれか1項に記載の船舶の自動操縦システム。
- 請求項1〜10のいずれか1項に記載の船舶の自動操縦システムを備えていることを特徴とする船舶。
- 追尾対象体の動きに従って自船を自動操船する船舶の自動操縦方法において、
前記追尾対象体を運用するコースに対応する仮想追尾対象体の仮想コースを前記仮想座標平面上に設けて、予め設定された前記仮想コースに対しての図形的な第1条件を満たす仮想移動地点を算出する設定ステップと、
前記追尾対象体の位置を検出して、前記仮想座標平面上に前記仮想追尾対象体の仮想位置を描く仮想位置表示ステップと、
前記仮想位置が予め設定された前記仮想コースに対しての図形的な第2条件を満たすか否かを判定する判定ステップと、
前記判定ステップで前記図形的な第2条件を満たす場合に、移動許可信号の入力を得て若しくは移動許可信号の入力を得ることなく、前記仮想移動地点に対応する実際の移動地点に向かって自船を移動するステップとを含むことを特徴とする船舶の自動操縦方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016255455A JP6686249B2 (ja) | 2016-12-28 | 2016-12-28 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
| PCT/JP2017/046384 WO2018123948A1 (ja) | 2016-12-28 | 2017-12-25 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016255455A JP6686249B2 (ja) | 2016-12-28 | 2016-12-28 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018103950A JP2018103950A (ja) | 2018-07-05 |
| JP6686249B2 true JP6686249B2 (ja) | 2020-04-22 |
Family
ID=62707552
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016255455A Active JP6686249B2 (ja) | 2016-12-28 | 2016-12-28 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6686249B2 (ja) |
| WO (1) | WO2018123948A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11181916B2 (en) | 2020-03-20 | 2021-11-23 | Yamaha Hatsudoki Kabushiki Kaisha | Watercraft and watercraft control system |
| US11334079B2 (en) | 2020-03-26 | 2022-05-17 | Yamaha Hatsudoki Kabushiki Kaisha | Watercraft and watercraft control system |
| CN115277533B (zh) * | 2022-07-20 | 2023-11-03 | 内蒙古电力(集团)有限责任公司内蒙古电力科学研究院分公司 | 变电站静态物理链路拓扑自动绘制方法 |
| CN116245916B (zh) * | 2023-05-11 | 2023-07-28 | 中国人民解放军国防科技大学 | 一种面向无人艇的红外舰船目标跟踪方法及装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08249060A (ja) * | 1995-03-15 | 1996-09-27 | Yokogawa Denshi Kiki Kk | 自律型水中航走装置 |
| JP2009132257A (ja) * | 2007-11-30 | 2009-06-18 | Universal Shipbuilding Corp | 操船制御方法、プログラム及び装置、並びに自動操船制御システム |
| JP5442071B2 (ja) * | 2012-07-04 | 2014-03-12 | ジャパンマリンユナイテッド株式会社 | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム |
| JP5566426B2 (ja) * | 2012-07-04 | 2014-08-06 | ジャパンマリンユナイテッド株式会社 | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム |
-
2016
- 2016-12-28 JP JP2016255455A patent/JP6686249B2/ja active Active
-
2017
- 2017-12-25 WO PCT/JP2017/046384 patent/WO2018123948A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018103950A (ja) | 2018-07-05 |
| WO2018123948A1 (ja) | 2018-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7756895B2 (ja) | 船舶の自動誘導方法、船舶の自動誘導プログラム、船舶の自動誘導システム、及び船舶 | |
| US12165522B1 (en) | Marine propulsion control system and method with collision avoidance override | |
| CN113759939B (zh) | 一种受限水域智能航行方法及装置 | |
| Campbell et al. | A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres | |
| EP1365301B1 (en) | Method and system for maneuvering a movable object | |
| JP6336162B2 (ja) | 改良した船舶操縦方法およびシステム | |
| US11600184B2 (en) | Marine propulsion control system and method | |
| CN109960262B (zh) | 一种基于几何法的无人艇动态避障方法和系统 | |
| CN102999050A (zh) | 一种智能水下机器人的自主避障方法 | |
| JP5932362B2 (ja) | 船体用制御装置、船体用制御プログラムおよび船体の制御方法 | |
| WO2018123947A1 (ja) | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 | |
| US20170370724A1 (en) | Systems and associated methods for route generation and modification | |
| JP6686249B2 (ja) | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 | |
| JPWO2020111044A1 (ja) | 制御目標生成装置及び操船制御装置 | |
| CN102945045A (zh) | 基于激光传感器和前视声纳的无人艇组合避障装置和方法 | |
| KR20170064345A (ko) | 운항체의 자율운항시스템 및 그 제어방법 | |
| JP2012203682A (ja) | 水中航走体用船上管制装置の表示方法 | |
| Yan et al. | An obstacle avoidance algorithm for unmanned surface vehicle based on a star and velocity-obstacle algorithms | |
| Mahipala et al. | Model predictive control for path following and collision-avoidance of autonomous ships in inland waterways | |
| JP2021076537A (ja) | 船舶の着桟支援プログラム、船舶の着桟支援システム、及び船舶の着桟支援システムを装備した船舶 | |
| Jo et al. | Development of autonomous algorithm for boat using robot operating system | |
| Paez et al. | Implementation of an unmanned surface vehicle for environmental monitoring applications | |
| Wu et al. | Development and field testing of an unmanned surface vehicle system for guidance control and target tracking | |
| JPH0578476B2 (ja) | ||
| Gauslaa | Navigation, guidance, and control for autonomous docking of ships |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20180604 |
|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20190313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200303 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6686249 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |