JP6673786B2 - 作業車自動走行システム及び走行経路管理装置 - Google Patents
作業車自動走行システム及び走行経路管理装置 Download PDFInfo
- Publication number
- JP6673786B2 JP6673786B2 JP2016173109A JP2016173109A JP6673786B2 JP 6673786 B2 JP6673786 B2 JP 6673786B2 JP 2016173109 A JP2016173109 A JP 2016173109A JP 2016173109 A JP2016173109 A JP 2016173109A JP 6673786 B2 JP6673786 B2 JP 6673786B2
- Authority
- JP
- Japan
- Prior art keywords
- traveling
- work
- route
- harvester
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002093 peripheral effect Effects 0.000 claims description 98
- 230000008859 change Effects 0.000 claims description 18
- 230000007704 transition Effects 0.000 claims description 17
- 238000011156 evaluation Methods 0.000 claims description 12
- 238000004891 communication Methods 0.000 description 61
- 238000007726 management method Methods 0.000 description 59
- 230000009183 running Effects 0.000 description 53
- 238000003306 harvesting Methods 0.000 description 37
- 238000004364 calculation method Methods 0.000 description 27
- 241001124569 Lycaenidae Species 0.000 description 23
- 230000006870 function Effects 0.000 description 23
- 238000012545 processing Methods 0.000 description 19
- 230000032258 transport Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 15
- 238000007599 discharging Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 11
- 239000000446 fuel Substances 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 238000001514 detection method Methods 0.000 description 7
- 238000003860 storage Methods 0.000 description 7
- 230000009471 action Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000012905 input function Methods 0.000 description 3
- 240000007594 Oryza sativa Species 0.000 description 2
- 235000007164 Oryza sativa Nutrition 0.000 description 2
- 241000209140 Triticum Species 0.000 description 2
- 235000021307 Triticum Nutrition 0.000 description 2
- 102100038968 WAP four-disulfide core domain protein 1 Human genes 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000000256 polyoxyethylene sorbitan monolaurate Substances 0.000 description 2
- 235000009566 rice Nutrition 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 240000002791 Brassica napus Species 0.000 description 1
- 235000004977 Brassica sinapistrum Nutrition 0.000 description 1
- 240000008620 Fagopyrum esculentum Species 0.000 description 1
- 235000009419 Fagopyrum esculentum Nutrition 0.000 description 1
- 244000068988 Glycine max Species 0.000 description 1
- 235000010469 Glycine max Nutrition 0.000 description 1
- 240000002582 Oryza sativa Indica Group Species 0.000 description 1
- 240000008467 Oryza sativa Japonica Group Species 0.000 description 1
- 101001136140 Pinus strobus Putative oxygen-evolving enhancer protein 2 Proteins 0.000 description 1
- 240000008042 Zea mays Species 0.000 description 1
- 235000005824 Zea mays ssp. parviglumis Nutrition 0.000 description 1
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 235000013339 cereals Nutrition 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 235000005822 corn Nutrition 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 108090000623 proteins and genes Proteins 0.000 description 1
- 241000894007 species Species 0.000 description 1
- GOLXNESZZPUPJE-UHFFFAOYSA-N spiromesifen Chemical compound CC1=CC(C)=CC(C)=C1C(C(O1)=O)=C(OC(=O)CC(C)(C)C)C11CCCC1 GOLXNESZZPUPJE-UHFFFAOYSA-N 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




























Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Guiding Agricultural Machines (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
このシステムで用いられている走行経路設定装置では、第1の作業車と第2の作業車との配置位置を選択することで走行経路が設定される。走行経路が設定されると、それぞれ、自車の位置を測位して、前記走行経路に沿って走行しながら作業を行う。
このような実情に鑑み、作業途中での経路変更を柔軟に行うことができる作業車自動走行システム及びそのようなシステムに用いられる走行経路管理装置が要望されている。
なお、この出願で用いられている「作業走行」という語句は、実際に作業を行いながら走行していることだけでなく、作業時における方向転換のための作業を行わない走行なども含めた広義の意味で用いられている。
このような状態情報に基づいて順次選択された走行経路要素に沿って実施される作業走行は、作業車の状態、作業地の状態、管理者の指令に適したものとなる。
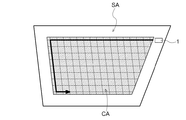
図1には、本発明の作業車自動走行システムによる作業走行が模式的に示されている。
この実施形態では、作業車は、作業走行として、走行しながら農作物を収穫する収穫作業(刈取作業)を行う収穫機1であり、一般に普通型コンバインと呼ばれている機種である。収穫機1によって作業走行される作業地は圃場と呼ばれる。圃場における収穫作業では、収穫機1が畦と呼ばれる圃場の境界線に沿って作業を行いながら周回走行した領域が外周領域SAとして設定される。外周領域SAの内側は作業対象領域CAとして設定される。外周領域SAは、収穫機1が収穫物の排出や燃料補給のための移動用スペース及び方向転換用スペース等として利用される。外周領域SAの確保のため、収穫機1は、最初の作業走行として、圃場の境界線に沿って3〜4周の周回走行を行う。周回走行では、一周毎に収穫機1の作業幅分だけ、圃場が作業されることになるので、外周領域SAは収穫機1の作業幅の3〜4倍程度の幅を有する。このことから、特別に注記しない限り、外周領域SAは既刈地(既作業地)として扱われ、作業対象領域CAは未刈地(未作業地)として扱われる。なお、この実施形態では、作業幅は、刈取り幅にオーバーラップ量を減算した値として取り扱われる。しかしながら、作業幅の概念は、作業車の種類によって異なる。
本発明での作業幅は、作業車の種類や作業種類によって規定されるものである。
本発明の作業車自動走行システムに組み込まれた収穫機1が、収穫作業を自動走行で行うためには、走行の目標となる走行経路を生成し、その走行経路を管理する走行経路管理装置が必要となる。この走行経路管理装置の基本的な構成と、この走行経路管理装置を用いた自動走行制御の基本的な流れとを、図2を用いて説明する。
走行経路要素群の一例として、図3には、作業対象領域CAを短冊状に分割する多数の平行分割直線を走行経路要素とする走行経路要素群が示されている。この走行経路要素群は2つのノード(両端点であって、ここで方向転換可能である)を1本のリンクで連結した直線状の走行経路要素を平行に並べたものである。走行経路要素は、作業幅のオーバーラップ量を調整することにより、等間隔を開けて並ぶように設定される。1つの直線で示される走行経路要素の端点から他の直線で示される走行経路要素の端点への移行には、Uターン走行(例えば180°の方向転換)が行われる。このような平行な走行経路要素をUターン走行によって繋ぎながら自動走行することを、以降は、直線往復走行と称する。
このUターン走行には、ノーマルUターン走行と、スイッチバックターン走行とが含まれる。ノーマルUターン走行は、収穫機1の前進だけで行われ、その走行軌跡はU字状となる。スイッチバックターン走行は、収穫機1の前進と後進とを用いて行われ、その走行軌跡はU字状とはならないが、結果的には、収穫機1はノーマルUターン走行と同じ方向転換が得られる。ノーマルUターン走行を行うためには、方向転換前の方向経路点と方向転換後の歩行経路点との間に2本以上の走行経路要素を挟む距離が必要となる。それより短い距離では、スイッチバックターン走行が用いられる。つまり、スイッチバックターンは、ノーマルUターン走行と異なって後進を行うため、収穫機1の旋回半径の影響がなく、移行する走行経路要素の選択肢が多い。しかし、スイッチバックターン走行では前後進の切替えが行われるため、スイッチバックターン走行は、基本的には、ノーマルUターン走行と比べて時間がかかる。
経路要素選択部63が、順次、次に走行すべき走行経路要素である次走行経路要素を選択する際の選択ルールは、作業走行の前に予め設定される静的ルールと、作業走行中にリアルタイムで利用される動的ルールとに分けることができる。静的ルールには、予め決められた基本的な走行パターンに基づいて走行経路要素を選択すること、例えば、図3に示すようなUターン走行を行いながら直線往復走行を実現するように走行経路要素を選択するルールや、図4に示すような外から内に向かう反時計回りの渦巻き走行を実現するように走行経路要素を選択するルールなどが含まれる。動的ルールには、リアルタイムでの収穫機1の状態、作業地の状態、管理者の指令などが含まれる。原則として、動的ルールは、静的ルールに優先して用いられる。このために、収穫機1の状態、作業地の状態、管理者の指令などを評価して求められる状態情報を出力する作業状態評価部55が備えられる。そのような評価のために必要となる入力パラメータとして種々の一次情報(作業環境)が作業状態評価部55入力される。この一次情報には、収穫機1に設けられている各種センサやスイッチからの信号だけでなく、天候情報や時刻情報や乾燥施設などの外部施設情報なども含まれている。さらに、複数台の収穫機1で協調作業を行う場合には、この一次情報に、他の収穫機1の状態情報も含まれる。
図5は、この実施の形態での説明に採用されている作業車としての収穫機1の側面図である。この収穫機1は、クローラ式の走行機体11が備えている。走行機体11の前部には、運転部12が設けられている。運転部12の後方には、脱穀装置13及び収穫物を貯留する収穫物タンク14が、左右方向に並設されている。また、走行機体11の前方には、収穫部15が高さ調整可能に設けられている。収穫部15の上方には、穀稈を起こすリール17が高さ調節可能に設けられている。収穫部15と脱穀装置13との間には刈取穀稈を搬送する搬送装置16、収穫物タンク14から収穫物を排出する排出装置18が設けられている。収穫物タンク14の下部に収穫物の重量(収穫物の貯留状態)を検出するロードセンサが装備され、収穫物タンク14の内部や周辺に、収量計や食味計(登録商標)が装備されている。食味計からは、品質データとして収穫物の水分値とタンパク値の測定データが出力される。収穫機1には、GNSSモジュールやGPSモジュールなどとして構成される衛星測位モジュール80が設けられている。衛星測位モジュール80の構成要素として、GPS信号やGNSS信号を受信するための衛星用アンテナが走行機体11の上部に取り付けられている。なお、衛星測位モジュール80には、衛星航法を補完するために、ジャイロ加速度センサや磁気方位センサを組み込んだ慣性航法モジュールを含めることができる。
図6には、この収穫機1に構築されている制御系と、通信端末4の制御系が示されている。この実施形態では、収穫機1のための走行経路を管理する走行経路管理装置は、通信端末4に構築された第1走行経路管理モジュールCM1と、収穫機1の制御ユニット5に構築された第2走行経路管理モジュールCM2とから構成されている。
(a)走行パターン(直線往復走行、渦巻き走行、ジグザグ走行等)(b)運搬車CVの支援車の駐車位置や収穫物排出等のための収穫機の駐車位置(c)作業形態(一台の収穫機1による作業、複数台の収穫機1による作業)(d)いわゆる中割ライン(e)収穫対象となる作物種(稲(ジャポニカ米、インディカ米)、麦、大豆、菜種、そば等)に応じた車速や脱穀装置13の回転速度の値等
設定可能な車速には、収穫走行時の車速、非作業旋回(Uターン走行など)時の車速、収穫物排出時や燃料補給時の作業対象領域CAから離脱して外周領域SAを走行する際の車速などが含まれる。自動走行制御部511は、衛星測位モジュール80によって得られた測位データに基づいて実車速を算出する。出力処理部7は、実車速が設定された車速に合うように、走行への変速操作指令等を車両走行機器群71に送る。
作業車自動走行システムにおける自動走行の例を、直線往復走行を行う例と、渦巻き走行を行う例とに分けて説明する。
この収穫機1は、走行完了した走行経路要素から次の走行経路要素移行する際に、図9で示すように、少なくとも2つの走行経路要素を挟んで次の走行経路要素に移行するノーマルUターン走行と、2つ以下の走行経路要素を挟んで、つまり隣接する走行経路要素へ移行することができるスイッチバックターン走行とが可能である。ノーマルUターン走行は、移行元の走行経路要素から外周領域SAに入ると、約180°の方向転換を行い、移行先の走行経路要素に入る。なお、移行元の走行経路要素と移行先の走行経路要素との間隔が大きい場合は、約90°の旋回の間に相応な直進が入ることになる。つまり、ノーマルUターン走行は、前進走行のみで実行される。これに対して、スイッチバックターン走行は、移行元の走行経路要素から外周領域SAに入ると、一旦約90°旋回した後、約90°旋回でスムーズに移行先の走行経路要素に入れる位置まで後進してから、移行先の走行経路要素に向かう。これにより、操舵制御は複雑になるが、互いの間隔が短い走行経路要素への移行も可能である。
図13を用いて、Uターン経路算出部603がUターン走行経路を生成する基本原理を説明する。図13では、LS0で示された旋回元の走行経路要素からLS1で示された旋回先の走行経路要素に移行するUターン走行経路が示されている。通常の走行では、LS0が作業対象領域CAにおける走行経路要素であれば、LS1が外周領域SAでの走行経路要素(=中間直進経路)となり、逆に、LS1が作業対象領域CAにおける走行経路要素であれば、LS0が外周領域SAでの走行経路要素(=中間直進経路)となるのが一般的である。走行経路要素LS0とLS1の直線式(または直線上の2点)がメモリに記録されており、これらの直線式からその交点(図13ではPXで示されている)及び交差角(図13ではθで示されている)が算出される。次に、走行経路要素LS0及び走行経路要素LS1に接するとともに、収穫機1の最小旋回半径と等しい半径(図13ではrで示されている)の接円が算出される。この接円と走行経路要素LS0及びLS1との接点(図13ではPS0,PS1で示されている)を結ぶ円弧(接円の一部)が、旋回経路となる。そこで、走行経路要素LS0とLS1との交点PXと、円との接点までの距離Yを、Y=r/(tan(θ/2))で求める。最小旋回半径が収穫機1の仕様により実質的に決まっているため、rは規定値である。なお、rは、最小旋回半径と同一の値でなくても良く、無理のない旋回半径を予め通信端末4等によって設定し、その旋回半径となるような旋回操作をプログラミングしてあれば良い。走行制御的には、旋回元の走行経路要素LS0を走行中に、交点までの距離がYである位置座標(PS0)に到達すると、旋回走行を開始し、次いで、旋回走行中に収穫機1の方位と旋回先の走行経路要素LS1の方位との差が許容値に収まれば旋回走行を終了する。その際、収穫機1の旋回半径は正確に半径rに一致しなくてもよい。旋回先の走行経路要素LS1との距離及び方位差に基づいて操舵制御されることで、収穫機1は旋回先の走行経路要素LS1に移行することができる。
図17には、上述した渦巻き走行において、走行経路要素の交点で用いられる方向転換ターンの一例が示されている。以降、このターンをαターンと称する。このαターン走行経路は、いわゆる切り返し走行経路の一種であり、走行元の走行経路要素(図17ではLS0で示されている)と旋回先の走行経路要素(図18ではLS1で示されている)の交点(図17ではLS1で示されている)から、前進での旋回経路を経て、後進での旋回経路で旋回先の走行経路要素に接する経路である。αターン走行経路は、αターン走行経路は基準化されているので、走行元の走行経路要素と旋回先の走行経路要素との交差角に応じて生成されたαターン走行経路が予め登録されている。したがって、経路管理部60は、算出された交差角に基づいて適正なαターン走行経路を読み出し、経路設定部64に与える。この構成に代えて、交差角毎の自動制御プログラムを自動走行制御部511に登録しておき、経路管理部60によって算出された交差角に基づいて、自動走行制御部511が適正な自動制御プログラム読み出すような構成を採用してもよい。
経路要素選択部63は、管理センタKSから受け取った作業計画書や通信端末4から人為的に入力された走行パターン(例えば、直線往復走行パターンや渦巻き走行パターン)と、自車位置と、作業状態評価部55から出力される状態情報とに基づいて、走行経路要素を順次選択する。即ち、設定された走行パターンのみを基準にして全走行経路を形成してしまう場合とは異なって、作業前には予測し得ない事態に対応した好適な走行経路が形成される。また、経路要素選択部63には、上述した基本的なルール以外に、以下のような経路選択ルールが予め登録されており、走行パターンと状態情報とに応じて、好適な経路選択ルールが適応される。
上述した実施形態では、圃場の作業走行は1台の収穫機1で行われていた。もちろん、本発明は、複数台の作業車の使用にも適用可能である。ここでは、理解のしやすさのために、2台の収穫機1によって作業走行(自動走行)する形態を説明する。図19には、マスタ収穫機1mとして機能する第1作業車と、スレーブ収穫機1sとして機能する第2作業車とが協調して、1つの圃場の作業走行の様子が示されている。マスタ収穫機1mには、監視者が乗り込んでおり、監視者は、マスタ収穫機1mに持ち込まれた通信端末4を操作する。便宜的に、マスタ及びスレーブという用語を使用したが、これらに主従関係はなく、マスタ収穫機1m及びスレーブ収穫機1sは、上述した走行経路設定ルーチン(走行経路要素の選択ルール)に基づいてそれぞれ独自にルート設定して自動走行を行う。ただし、マスタ収穫機1mとスレーブ収穫機1sとの間はそれぞれの通信処理部70を介してデータ通信可能であり、状態情報の交換を行う。通信端末4は、マスタ収穫機1mに監視者の指令や走行経路に関するデータなどを与えるだけでなく、通信端末4とマスタ収穫機1mとを介して、スレーブ収穫機1sにも監視者の指令や走行経路に関するデータを与えることができる。例えば、スレーブ収穫機1sの作業状態評価部55から出力された状態情報はマスタ収穫機1mにも転送され、マスタ収穫機1mの作業状態評価部55から出力された状態情報はスレーブ収穫機1sにも転送される。したがって、双方の経路要素選択部63は、双方の状態情報と双方の自車位置とを考慮して次走行経路要素を選択する機能を有する。また、通信端末4に、経路管理部60と経路要素選択部63が構築されている場合には、双方の収穫機1が、状態情報を通信端末4に与え、そこで選択された次走行経路要素を受け取ることになる。
例えば、一方の収穫機1に直線往復走行パターンが設定されている場合は、他方の収穫機1にも直線往復走行パターンが設定される。
マスタ収穫機1mとスレーブ収穫機1sとが協調して作業走行する場合、通常マスタ収穫機1mには、監視者が搭乗しているので、マスタ収穫機1mについては、必要に応じて、通信端末4を通じて、自動走行制御における車両走行機器群71や作業装置機器群72に対するパラメータの値を微調整できる。マスタ収穫機1mの車両走行機器群71や作業装置機器群72に対するパラメータの値を、スレーブ収穫機1sにおいても実現するため、図27に示すように、マスタ収穫機1mからスレーブ収穫機1sのパラメータを調整できる構成を採用することができる。ただし、通信端末4は、スレーブ収穫機1sにも備えられていても何ら問題はない。なぜならば、スレーブ収穫機1sも、単独自動走行をしたり、マスタ収穫機1mとして使用されうるからである。
(1)上述の実施形態では、事前の周回走行によって、直線往復走行におけるUターン走行にとっても、渦巻き走行における方向転換ターン(αターン)にとっても十分な広さのスペースが確保されることを前提に自動走行の説明をした。しかし、一般的には、Uターン走行に要するスペースは、方向転換ターンに要するスペースよりも広く、事前の周回走行では、Uターン走行にはスペースが十分でないことが有り得る。しかし、周回走行は手動走行であるため、しかも、選択される走行パターンが必ずしもUターン走行であるとは限らないため、Uターン走行を前提に周回走行を行うと手動走行の走行時間や走行距離が長くなり、例えば、不慣れな運転者が周回走行を行う場合に、作業効率が悪くなってしまう恐れがある。そこで、以下のような自動走行制御を実行できるように構成してあっても良い。
このケースでは、作業対象領域CAに、縦横の間隔が第1作業幅である縦直線群と横直線群とで走行経路要素群が設定される。横直線群に属する走行経路要素には、その経路番号として、X1からX9の記号が与えられており、縦直線群に属する走行経路要素には、その経路番号として、Y1からY9の記号が与えられている。
上述したように、周回走行による作業によって外周領域SAが作り出されると、領域設定部44によって、圃場が、外周領域SAと作業対象領域CAとに区分けされ、さらに作業対象領域CAには、短冊経路要素算出部602によって算出される走行経路要素群が設定される。この段階で、図8から図10に基づいて説明した経路選択アルゴリズムに基づいて、仮の全走行経路が設定される。任意の始点から収穫作業が開始される。一般には、始点として、収穫機1の現位置、または、監視者が通信端末4を通じて入力した位置が採用される。ここでは、経路番号:16の一端が始点として選択されている。
自動走行の開始が指令されると、経路番号:16の走行経路要素に沿った作業走行が実行される。
仮設定された全走行経路に基づいて、経路番号:13の走行経路要素が選択され、その走行経路要素に沿った作業走行が実行される。
同様に、以降の作業走行は、仮に設定された全走行経路に基づいて順次進められる。ただし、仮に設定された全走行経路は、現在の走行経路要素と次の走行経路要素との関係のみによって決定されたものであるため、必ずしも適正な選択順番、つまり作業時間の短い選択順番とはならない。このため、作業走行を開始した時点から、以下のステップに示すアルゴリズムによる経路選択が別途実行され始めている。
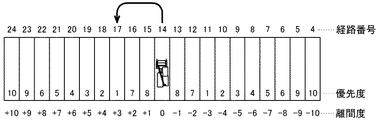
仮の全走行経路において選択順番が最終の走行経路要素から遡って3つ分の走行経路要素を抽出し、それらの走行経路要素間での最適な走行順を算定し始める。この実施形態では、実走行が経路番号:10(仮の全走行経路における選択順番3番目)まで進んだときに、ラスト3つ目の走行経路要素から残りの走行経路要素2つを走行するのに最適な選択順番が算出されたとする。そして、例えば、元の選択順番が、『経路番号:19→経路番号:9→経路番号:12(走行時間/移動量:13)』であるのに対して、再算出された選択順番が、『経路番号:19→経路番号:12→経路番号:9(走行時間/移動量:10)』であり、これらが比較され、再算出された選択順番の方が、走行時間(移動量)が小さいと判定される。つまり、再算出された選択順番が最適な経路選択であることになる。
ステップ#05で再算出された選択順番によって、仮の全走行経路において対応する走行経路要素の選択順番が置き換えられる。この間に、収穫機1は、仮の全走行経路における選択順番4番目である経路番号:7に移動している。しかし、実走行している収穫機1が、置き換えられていない元の選択順番に則って、置き換えられた選択順番19番目の経路番号:19に到達するには、まだまだ時間的な余裕がある。そこで、即ち、選択順番の再算出は、抽出する所定数を、仮の全走行経路の最終走行経路要素側から1つずつ増やしながら、実走行している走行経路要素が、再算出のために抽出される走行経路要素に含まれるまで繰り返される。これにより、より多くの走行経路要素が適正選択順番となる。ただし、再算出された選択順番が、仮の全走行経路の選択順番と同じである場合もあり、この場合は、上記の置き換えはスキップされる。なお、本形態は、上記アルゴリズムを説明するための例示に過ぎず、例えば、仮の全走行経路における選択順番は、図8から図10に基づいて説明した基本ルール通りになっていない箇所がある。
しかし、短冊経路要素算出部602を備えずに、メッシュ経路要素算出部601によって算出されたメッシュ状の直線群である走行経路要素を用いて、直線往復走行を実現しても良い。
1m :マスタ収穫機
1s :スレーブ収穫機
4 :通信端末
5 :制御ユニット
41 :タッチパネル
42 :作業地データ入力部
43 :外形データ生成部
44 :領域設定部
50 :通信処理部
51 :走行制御部
511 :自動走行制御部
512 :手動走行制御部
52 :作業制御部
53 :自車位置算出部
54 :報知部
55 :作業状態評価部
60 :経路管理部
601 :メッシュ経路要素算出部
603 :Uターン経路算出部
62 :短冊経路要素算出部
63 :経路要素選択部
64 :経路設定部
70 :通信処理部
80 :衛星測位モジュール
CM1 :第1走行経路管理モジュール
CM2 :第2走行経路管理モジュール
CV :運搬車
S1 :第1辺
S2 :第2辺
S3 :第3辺
S4 :第4辺
SA :外周領域
CA :作業対象領域
Claims (6)
- 作業地を作業しながら走行する作業車の自動走行を管理する作業車自動走行システムであって、
前記作業車の自車位置を示す測位データを出力する衛星測位モジュールと、
前記作業車が周回した前記作業地の外周側の領域を外周領域として設定するとともに、前記外周領域の内側を作業対象領域として設定する領域設定部と、
前記作業対象領域を網羅する走行経路を構成する多数の走行経路要素の集合体である走行経路要素群を算出して、読み出し可能に格納する経路管理部と、
前記作業対象領域を網羅する全行程を予め決めることなく走行すべき次走行経路要素を順次前記走行経路要素群から選択する経路要素選択部と、
前記次走行経路要素と前記自車位置とに基づいて前記作業車を自動走行させる自動走行制御部と、を備えた作業車自動走行システム。 - 前記作業車の作業環境を評価して求められる状態情報を出力する作業状態評価部が備えられ、かつ
前記経路要素選択部は、前記自車位置と前記状態情報とに基づいて、前記次走行経路要素を前記走行経路要素群から選択する請求項1に記載の作業車自動走行システム。 - 前記走行経路要素群は、前記作業対象領域を短冊状に分割する互いに平行な平行線からなる平行線群であり、前記作業車のUターン走行により、1つの走行経路要素の一端から他の走行経路要素の一端への移行が実行される請求項1または2に記載の作業車自動走行システム。
- 前記走行経路要素群は、前記作業対象領域をメッシュ分割するメッシュ線からなるメッシュ線群であり、前記メッシュ線同士の交点が、前記作業車の方向転換を許す方向転換可能点となる請求項1または2に記載の作業車自動走行システム。
- 前記作業車の作業環境を評価して求められる状態情報を出力する作業状態評価部が備えられ、かつ
前記作業地には複数台の作業車が投入されており、前記経路要素選択部は、各作業車の自車位置と各作業車の前記状態情報とに基づいて、前記次走行経路要素を前記走行経路要素群から選択する請求項1から4のいずれか一項に記載の作業車自動走行システム。 - 作業地を作業しながら自動走行するための自動走行制御部を備えた作業車の走行経路を管理する走行経路管理装置であって、
作業車が周回した圃場の外周側の領域を外周領域として設定するとともに、前記外周領域の内側を作業対象領域として設定する領域設定部と、
前記作業対象領域を網羅する走行経路を構成する多数の走行経路要素の集合体である走行経路要素群を算出して、読み出し可能に格納する経路管理部と、
前記作業対象領域を網羅する全行程を予め決めることなく走行すべき次走行経路要素を順次前記走行経路要素群から選択する経路要素選択部と、を備えた走行経路管理装置。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016173109A JP6673786B2 (ja) | 2016-09-05 | 2016-09-05 | 作業車自動走行システム及び走行経路管理装置 |
| EP17845863.4A EP3508045A4 (en) | 2016-09-05 | 2017-06-28 | AUTONOMOUS WORK VEHICLE DRIVING SYSTEM, ROUTE MANAGEMENT DEVICE, ROUTE GENERATION DEVICE AND ROUTE DETERMINATION DEVICE |
| PCT/JP2017/023774 WO2018042853A1 (ja) | 2016-09-05 | 2017-06-28 | 作業車自動走行システム、走行経路管理装置、走行経路生成装置、走行経路決定装置 |
| US16/306,948 US11726485B2 (en) | 2016-09-05 | 2017-06-28 | Autonomous work vehicle travel system, travel route managing device, travel route generating device, and travel route determining device |
| KR1020187032477A KR102523426B1 (ko) | 2016-09-05 | 2017-06-28 | 작업차 자동 주행 시스템, 주행 경로 관리 장치, 주행 경로 생성 장치, 주행 경로 결정 장치 |
| CN201780031750.7A CN109310042B (zh) | 2016-09-05 | 2017-06-28 | 作业车自动行驶系统、行驶路径管理装置、行驶路径生成装置、行驶路径决定装置 |
| JP2020037037A JP6982116B2 (ja) | 2016-09-05 | 2020-03-04 | 作業車自動走行システム及び走行経路管理装置 |
| JP2021188117A JP2022028836A (ja) | 2016-09-05 | 2021-11-18 | 作業車自動走行システム及び走行経路管理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016173109A JP6673786B2 (ja) | 2016-09-05 | 2016-09-05 | 作業車自動走行システム及び走行経路管理装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020037037A Division JP6982116B2 (ja) | 2016-09-05 | 2020-03-04 | 作業車自動走行システム及び走行経路管理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018038291A JP2018038291A (ja) | 2018-03-15 |
| JP6673786B2 true JP6673786B2 (ja) | 2020-03-25 |
Family
ID=61624226
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016173109A Active JP6673786B2 (ja) | 2016-09-05 | 2016-09-05 | 作業車自動走行システム及び走行経路管理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6673786B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6911176B2 (ja) * | 2016-12-05 | 2021-07-28 | ヤンマーパワーテクノロジー株式会社 | 経路生成システム |
| JP7488759B2 (ja) * | 2017-03-09 | 2024-05-22 | ヤンマーパワーテクノロジー株式会社 | 経路生成システム |
| JP6770015B2 (ja) * | 2018-03-22 | 2020-10-14 | ヤンマーパワーテクノロジー株式会社 | 圃場管理装置 |
| JP6916138B2 (ja) * | 2018-03-28 | 2021-08-11 | ヤンマーパワーテクノロジー株式会社 | 作業車両の自動走行装置 |
| JP6850760B2 (ja) * | 2018-03-28 | 2021-03-31 | ヤンマーパワーテクノロジー株式会社 | 作業車両の自動走行装置 |
| CN110573979B (zh) * | 2018-03-29 | 2023-11-14 | 深圳市大疆软件科技有限公司 | 作业路径调整方法及装置、可移动设备作业路径调整方法及设备、和记录介质 |
| DE102018209336A1 (de) * | 2018-06-12 | 2019-12-12 | Robert Bosch Gmbh | Verfahren und Einrichtung zum Betrieb von autonom betriebenen Arbeitsmaschinen |
| JP6983734B2 (ja) * | 2018-08-29 | 2021-12-17 | 株式会社クボタ | 収穫機 |
| US11054831B2 (en) * | 2018-09-27 | 2021-07-06 | Caterpillar Paving Products Inc. | Automatic site planning for autonomous construction vehicles |
| CN112996378B (zh) * | 2018-11-15 | 2023-04-18 | 株式会社久保田 | 收割机以及路径设定系统 |
| JP7039444B2 (ja) * | 2018-11-27 | 2022-03-22 | 株式会社クボタ | 収穫機 |
| US11212954B2 (en) * | 2019-05-08 | 2022-01-04 | Deere & Company | Apparatus and methods for field operations based on historical field operation data |
| JP7275014B2 (ja) * | 2019-11-29 | 2023-05-17 | 株式会社クボタ | 収穫機 |
| JPWO2021182020A1 (ja) * | 2020-03-10 | 2021-09-16 | ||
| JP7073462B2 (ja) * | 2020-09-23 | 2022-05-23 | ヤンマーパワーテクノロジー株式会社 | 圃場管理装置 |
| CN114935929B (zh) * | 2022-04-08 | 2023-08-15 | 广州工程技术职业学院 | 一种农业机械信息化监控管理系统 |
| JP2023155703A (ja) * | 2022-04-11 | 2023-10-23 | 武司 若▲崎▼ | 連動システム及び刈り取り方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR940007727B1 (ko) * | 1992-03-09 | 1994-08-24 | 주식회사 금성사 | 청소기의 자동 주행 청소방법 |
| JPH0683445A (ja) * | 1992-08-31 | 1994-03-25 | Shinko Electric Co Ltd | 自動走行移動体による無人搬送システムにおける走行経路選定方法 |
| DE19804195A1 (de) * | 1998-02-03 | 1999-08-05 | Siemens Ag | Bahnplanungsverfahren für eine mobile Einheit zur Flächenbearbeitung |
| JP4133114B2 (ja) * | 2002-08-22 | 2008-08-13 | アルパイン株式会社 | 車々間通信装置 |
| JP2012105557A (ja) * | 2010-11-15 | 2012-06-07 | Original Soft:Kk | 自動芝刈り機 |
| JP2015137990A (ja) * | 2014-01-24 | 2015-07-30 | アルパイン株式会社 | ナビゲーション装置及びコンピュータプログラム |
-
2016
- 2016-09-05 JP JP2016173109A patent/JP6673786B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018038291A (ja) | 2018-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6936356B2 (ja) | 作業車自動走行システム | |
| JP6673786B2 (ja) | 作業車自動走行システム及び走行経路管理装置 | |
| JP6832828B2 (ja) | 走行経路決定装置 | |
| WO2018042853A1 (ja) | 作業車自動走行システム、走行経路管理装置、走行経路生成装置、走行経路決定装置 | |
| WO2018116770A1 (ja) | 作業車自動走行システム | |
| JP2020127405A5 (ja) | ||
| WO2018101351A1 (ja) | 走行経路管理システム及び走行経路決定装置 | |
| JP6793625B2 (ja) | 走行経路管理システム | |
| JP6920958B2 (ja) | 走行経路生成装置 | |
| JP6920970B2 (ja) | 走行経路決定装置 | |
| KR102586896B1 (ko) | 주행 경로 관리 시스템 및 주행 경로 결정 장치 | |
| KR20190096956A (ko) | 작업차 자동 주행 시스템 | |
| JP6842907B2 (ja) | 作業車自動走行システム | |
| JP6920969B2 (ja) | 走行経路管理システム | |
| KR102452919B1 (ko) | 작업차 자동 주행 시스템 | |
| JP6982116B2 (ja) | 作業車自動走行システム及び走行経路管理装置 | |
| JP6689738B2 (ja) | 作業車自動走行システム | |
| JP6789800B2 (ja) | 作業車自動走行システム | |
| JP6891097B2 (ja) | 走行経路決定装置 | |
| JP2018099112A5 (ja) | ||
| JP2021035381A (ja) | 作業車自動走行システム | |
| JP2020110158A5 (ja) | ||
| JP2022028836A5 (ja) | ||
| JP6673813B2 (ja) | 走行経路管理システム | |
| WO2018116771A1 (ja) | 走行経路決定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171102 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6673786 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |