以下、本発明の実施の形態による建設機械のポンプトルク制御装置を、小型の油圧ショベル、特に後方小旋回式の油圧ショベルに適用した場合を例に挙げ、添付図面に従って詳細に説明する。
ここで、図1ないし図12は第1の実施の形態を示している。図1において、小型の油圧ショベル1は、種々の作業現場(一例として、市街地のように周囲に障害物が存在する狭い作業現場)で土砂等の掘削作業を行うときに用いられる。この油圧ショベル1は、自走可能なクローラ式の下部走行体2と、該下部走行体2上に旋回装置3を介して旋回可能に搭載され、該下部走行体2と共に車体を構成する上部旋回体4と、該上部旋回体4の前側に俯仰動可能に設けられた作業装置5とを含んで構成されている。
小型の油圧ショベル1は、下部走行体2上で上部旋回体4を旋回駆動するときに、上部旋回体4の旋回半径が下部走行体2の車幅内に収まるように後方小旋回式油圧ショベルとして構成されている。作業装置5は、例えばスイングポスト式の作業装置として構成され、スイングポスト5A、ブーム5B、アーム5C、作業具としてのバケット5D、スイングシリンダ(図示せず)、ブームシリンダ5E、アームシリンダ5Fおよびバケットシリンダ5G等を備えている。
上部旋回体4は、旋回フレーム6、外装カバー7、キャブ8およびカウンタウエイト9等により構成されている。旋回フレーム6は上部旋回体4の支持構造体を構成している。この旋回フレーム6は、旋回装置3を介して下部走行体2上に取付けられている。旋回フレーム6には、その後部側にカウンタウエイト9、エンジン10が設けられ、左前側にはキャブ8が設けられている。また、旋回フレーム6には、キャブ8とカウンタウエイト9との間に位置して外装カバー7が設けられている。この外装カバー7は、旋回フレーム6、キャブ8およびカウンタウエイト9と共に、エンジン10等を内部に収容する空間(機械室)を画成するものである。
キャブ8は旋回フレーム6の左前側に搭載されている。このキャブ8は、オペレータが搭乗する運転室を内部に画成している。また、キャブ8の内部には、オペレータが着座する運転席、各種の操作レバー(例えば、図3中に示す操作レバー23A)等が配設されている。カウンタウエイト9は上部旋回体4の一部を構成している。このカウンタウエイト9は、エンジン10の後側に位置して旋回フレーム6の後端部に取付けられ、作業装置5との重量バランスをとるものである。また、カウンタウエイト9の後面側は、図2に示すように円弧状をなして形成され、上部旋回体4の旋回半径を小さく収める構成となっている。
換言すると、建設機械としての油圧ショベル1は、上部旋回体4の旋回半径をできるだけ小さくするために、カウンタウエイト9を旋回中心に接近させて配置し、かつ、カウンタウエイト9の後面が旋回中心を中心とした円弧状に形成されている。また、上部旋回体4は、旋回フレーム6の後部に油圧ポンプ14およびパイロットポンプ17を駆動するためのエンジン10を搭載し、旋回フレーム6の前側にキャブ8、作動油タンク15、燃料タンク(図示せず)等を搭載している。
エンジン10は、旋回フレーム6の後側に横置き状態で設けられ、カウンタウエイト9の前側に配置されている。このエンジン10は、小型の油圧ショベル1に原動機として搭載されるため、例えば小型のディーゼルエンジン(即ち、ターボ式過給機付きダウンサイジングエンジン)を用いて構成されている。エンジン10は、例えば4気筒の多気筒エンジンにより構成され、インテークマニホールドからなる吸気管10Aと、エキゾーストマニホールドからなる排気管10Bとを有している。
図2、図3に示すように、エンジン10には、吸気管10Aと排気管10Bとの間に位置してターボ式過給機11が設けられている。この過給機11は、吸気管10Aの途中に設けられたコンプレッサ11Aと、排気管10Bの途中に設けられた排気タービン11Bとを有している。この排気タービン11Bは、エンジン10から排気管10B内に排出された排気ガスの流れによって回転される。過給機11のコンプレッサ11Aは、排気タービン11Bにより回転駆動され、吸気管10Aから各気筒内に向けて吸入空気を過給圧状態で強制的に送り込む。
過給機11付きのエンジン10は、吸入空気を過給圧状態で吸込むことによって燃料の燃焼効率が高められ、特に高回転数域で出力トルク(エンジン馬力としてのパワー)を増大することができる。このとき、吸入空気の過給圧は、後述の空気圧センサ28で検出される。また、吸入空気の温度は、温度センサ29により検出される。
過給機11付きエンジン10は、例えば排気量が1.5L(リットル)程度の小型エンジンであっても、例えば2.2L程度のエンジン(過給機なし)と同等の出力特性を有している。このため、過給機11付きエンジン10を用いることは、原動機(エンジン)の小型化と省エネルギ化を図る上で有効な手段となる。しかし、このエンジン10は、例えば高回転数域で過給機11が有効に機能するが、エンジン10の低回転域では、吸入空気量が不足してトルクの減少率が大きくなる傾向がある。このため、本実施の形態は、エンジン10が低回転数域で油圧ポンプ14から過負荷を受けることがない構成を後述の如く採用している。
エンジン10の吸気管10A側には、外気を清浄化し吸入空気として吸込むためのエアクリーナ12が設けられている。排気管10B側には、排気音を低減させるマフラ13が設けられ、このマフラ13には、エンジン10の排気ガスに含まれる有害物質を除去して排気ガスを浄化する排気ガス浄化装置(図示せず)が設けられている。マフラ13(排気ガス浄化装置)は、図2に示すように、例えばエンジン10の左側上部で、後述する動力伝達装置(図示せず)の上側となる位置に配設されている。マフラ13(排気ガス浄化装置)は、排気管10Bと共に排気ガス通路を構成し、上流側から下流側に排気ガスが流通する間に、この排気ガスに含まれる有害物質を除去して排気ガスの浄化を行う。
例えば、上部旋回体4(車体)の後方からみて、エンジン10の左側には可変容量型油圧ポンプ14(以下、油圧ポンプ14という)が設けられている。この油圧ポンプ14は、作動油タンク15(図3参照)と共にメインの油圧源を構成する。メインの油圧ポンプ14は、可変容量型の斜板式、斜軸式またはラジアルピストン式油圧ポンプ等によって構成され、例えば斜板または斜軸等からなる容量可変部14Aを有している。油圧ポンプ14は、エンジン10の左側(即ち、出力軸側)に動力伝達装置(図示せず)を介して取付けられ、この動力伝達装置によりエンジン10の回転出力が伝えられる。油圧ポンプ14は、エンジン10によって駆動されることにより後述の方向制御弁22等に向けて圧油(作動油)を供給するものである。
図3に示すように、メインの油圧ポンプ14には容量制御用のレギュレータ16が付設されている。このレギュレータ16は、油圧ポンプ14の容量可変アクチュエータを構成している。レギュレータ16は、後述の車体コントローラ32(ポンプ容量制御装置32C)から出力される制御信号に従って油圧ポンプ14の容量可変部14Aを駆動する。これによって、油圧ポンプ14は、その吐出容量(押のけ容積)が可変に制御される。レギュレータ16は、例えばソレノイド等の電磁アクチュエータまたは油圧アクチュエータにより構成される。
ここで、電磁アクチュエータでレギュレータ16を構成する場合、例えば車体コントローラ32(ポンプ容量制御装置32C)から出力される制御信号の電流値に応じて、レギュレータ16が図3中の小容量(Min)と大容量(Max)との間で伸縮するように駆動される。これにより、油圧ポンプ14は、容量可変部14Aが傾転駆動され、その吐出容量が小容量と大容量との間で可変に制御される。なお、レギュレータ16を油圧アクチュエータで構成する場合には、パイロットポンプ17からのパイロット圧が傾転制御圧としてレギュレータ16に給排される。この場合、前記傾転制御圧は、車体コントローラ32(ポンプ容量制御装置32C)からの制御信号に従って可変に圧力調整され、レギュレータ16は図3中の小容量(Min)と大容量(Max)との間で伸縮するように駆動される構成とすればよい。
パイロットポンプ17は作動油タンク15と共にパイロット油圧源を構成している。このパイロットポンプ17は、エンジン10によりメインの油圧ポンプ14と一緒に回転駆動される。パイロットポンプ17の吐出側には、作動油タンク15との間に低圧リリーフ弁18が設けられている。この低圧リリーフ弁18は、パイロットポンプ17の吐出圧力を予め決められたリリーフ設定圧以下に抑えるものである。
メインの油圧ポンプ14には、その吐出管路19と作動油タンク15との間に高圧リリーフ弁20が設けられている。この高圧リリーフ弁20は、油圧ポンプ14に過剰圧が発生するのを防ぐため、油圧ポンプ14の吐出圧力を予め決められたリリーフ設定圧以下に抑える。このリリーフ設定圧は、低圧リリーフ弁18よりも十分に高い圧力に設定されている。
油圧モータ21は、油圧ショベル1に設ける複数の油圧アクチュエータの代表例を示している。この油圧モータ21は、例えば油圧ショベル1の旋回用または走行用の油圧モータを構成する。なお、油圧アクチュエータとしては、油圧モータ21に限らず、例えば作業装置5に設けられる前記スイングシリンダ、ブームシリンダ5E、アームシリンダ5Fおよびバケットシリンダ5G等を用いることができる。
方向制御弁22は、油圧ポンプ14、作動油タンク15と油圧モータ21との間に設けられている。この方向制御弁22は、例えば6ポート3位置の油圧パイロット式方向制御弁からなり、左,右両側には油圧パイロット部22A,22Bが設けられている。方向制御弁22は、後述の操作弁23から油圧パイロット部22A,22Bにパイロット圧が供給されることにより、中立位置(I)から切換位置(II),(III)のいずれかに切換えられる。このとき、油圧ポンプ14から吐出管路19を介して油圧モータ21に給排される圧油の流量は、方向制御弁22のストローク量(即ち、後述する操作レバー23Aの傾転操作量)に対応して可変に制御される。
油圧モータ21は、方向制御弁22を介して減圧弁型のパイロット操作弁23(以下、操作弁23という)により遠隔操作される。この操作弁23は、方向制御弁22を切換操作する操作装置を構成している。操作弁23は、例えば油圧ショベル1のキャブ8内に設けられ、オペレータによって傾転操作される操作レバー23Aを有している。操作レバー23Aは、足踏み操作される操作ペダルでもよい。操作弁23は、そのポンプポートがパイロットポンプ17の吐出側に接続され、タンクポートが作動油タンク15に接続されている。操作弁23の出力ポートは、パイロット管路24A,24Bを介して方向制御弁22の油圧パイロット部22A,22Bに接続されている。
操作弁23は、オペレータが操作レバー23Aを傾転操作したときに、その操作量に対応したパイロット圧をパイロット管路24A,24Bを通じて方向制御弁22の油圧パイロット部22A,22Bに供給する。これにより、方向制御弁22は、中立位置(I)から切換位置(II),(III)のいずれか一方に切換えられ、このときのストローク量(切換え量)は、操作レバー23Aの操作量に対応して増減される。
圧力センサ25は油圧ポンプ14の吐出圧力Pを検出する圧力検出器である。この圧力センサ25は、例えば油圧ポンプ14と方向制御弁22との間で吐出管路19に接続され、この吐出管路19内の圧力を吐出圧力Pとして検出する。圧力センサ25からの検出信号は、後述する車体コントローラ32のポンプ容量制御装置32C(図4参照)に出力される。
燃料噴射装置26は、例えばエンジン10に対する燃料供給量を可変に制御するコモンレールシステム(特に、ディーゼルエンジンに採用されている燃料噴射システム)により構成されている。燃料噴射装置26は、燃料ポンプで高圧化された燃料がコモンレールと呼ばれる蓄圧室(いずれも図示せず)に蓄えられ、複数の燃料噴射弁(図示せず)から電子制御によって各気筒(燃焼室)内へと噴射される構成である。
燃料噴射装置26は、前記コモンレールに高圧燃料を蓄えることによって、燃料の高圧化だけでなく、エンジン10の回転速度に依存せずに、燃料の噴射圧力、噴射量、噴射時期を制御することが可能となっている。即ち、燃料噴射装置26は、後述の制御装置30(ECU31)から出力される制御信号に基づいてエンジン10に供給すべき燃料の噴射量が可変に制御される。これにより、エンジン10は、その回転数が前記制御信号による目標回転数Nt(図4参照)に対応した回転数となるように制御される。
回転センサ27はエンジン10の実際の回転数(実回転数)を検出する回転数検出装置である。この回転センサ27は、エンジン10の出力軸(例えば、クランク軸)の回転を検出し、その検出信号を回転数検出信号として制御装置30のECU31に出力する。このECU31は、エンジン10の実回転数が目標回転数Nt(図4参照)に近付くように燃料噴射装置26をフィードバック制御するものである。エンジン10の吸気管10A側には、吸入空気の過給圧を検出する空気圧センサ28と、吸入空気の温度を検出する温度センサ29とが設けられている。
制御装置30は、例えばマイクロコンピュータ等を用いて構成されている。この制御装置30は、ECU31と車体コントローラ32とを含んで構成されている。制御装置30(即ち、ECU31と車体コントローラ32)は、その入力側に圧力センサ25、燃料噴射装置26、回転センサ27、空気圧センサ28、温度センサ29、回転数指示装置33および操作検出器34等が接続され、その出力側はレギュレータ16および燃料噴射装置26等に接続されている。
制御装置30は、回転数指示装置33による目標回転数Nt(図4参照)に従ってエンジン10の回転数を制御する。また、制御装置30は、油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係(図7参照)がエンジン10の馬力曲線に基づいたP−Q特性となるように、レギュレータ16を介して油圧ポンプ14の容量制御を行うものである。
回転数指示装置33は、油圧ショベル1のキャブ8内に設けられ、オペレータによって手動で操作される操作ダイヤルにより構成されている。この回転数指示装置33は、外部からのダイヤル操作によってエンジン10の目標回転数Ntを指示する装置である。なお、回転数指示装置33は、前記操作ダイヤルに限られるものではなく、例えば公知のアップダウンスイッチまたはエンジンレバー(いずれも図示せず)によっても構成することができる。
操作検出器34は、例えば操作レバー23Aによる操作弁23の操作を検出するため、シャトル弁35の出力側圧力を検出している。このシャトル弁35は、操作弁23の出力ポートに接続されたパイロット管路24A,24Bのうち、高圧側の圧力を選択する高圧選択手段である。即ち、オペレータが操作レバー23Aを傾転操作したときには、パイロット管路24A,24Bのいずれか一方にパイロット圧が発生し、操作検出器34はこれを検出することにより、操作弁23が操作状態か、非操作状態かを検出するものである。なお、操作検出器34は、操作レバー23Aの傾転角から操作の有無(操作状態か、非操作状態か)を直接的に検出する構成としてもよい。
制御装置30のECU31は、例えばエンジンコントローラとして構成され、その入力側には、燃料噴射装置26、回転センサ27、空気圧センサ28、温度センサ29および車体コントローラ32等が接続されている。ECU31の出力側には、燃料噴射装置26および車体コントローラ32等が接続されている。ECU31には、エンジン10の燃料噴射装置26(即ち、前記燃料噴射弁)から噴射される燃料の噴射量に相当する検出信号が入力されると共に、ターボ式過給機11で圧縮された過給圧状態の吸入空気量に相当する検出信号(即ち、過給圧の検出信号)と吸入空気温度の検出信号とが入力される。
これにより、ECU31は、回転数指示装置33による目標回転数Nt(図4参照)に従ってエンジン10の回転数を制御する。即ち、ECU31は、回転センサ27で検出されるエンジン10の実回転数が回転数指示装置33による目標回転数Ntに近付くように、燃料噴射装置26をフィードバック制御するものである。なお、ターボ式過給機11で圧縮された過給圧状態の吸入空気量は、空気圧センサ28で検出される過給圧に対して、例えば図12中に示す特性線52の如く比例した関係となっている。
車体コントローラ32は、ECU31および操作装置(即ち、操作弁23の操作を検出する操作検出器34)から入力される信号に基づいてレギュレータ16を制御することにより、油圧ポンプ14の吐出容量を小容量と大容量との間で可変に制御する。車体コントローラ32は、その入力側が圧力センサ25、ECU31、回転数指示装置33および操作検出器34等に接続され、その出力側はレギュレータ16およびECU31等に接続されている。
また、車体コントローラ32は、例えば不揮発性メモリ,ROM,RAM等からなるメモリ32Mを有している。このメモリ32M内には、後述の図5に示す目標入力トルクに従った減トルク制御用の処理プログラムと、エンジン10の回転数Nと出力トルクTとの関係を図6に示す特性線36として記憶した出力トルク算出マップと、油圧ポンプ14の吐出圧力Pと吐出容量Q(流量)との関係(P−Q特性)を図7に示す目標トルク特性38〜41として記憶したP−Q特性マップと、後述の図8に示すエンジンラグダウンを抑制する制御処理用のプログラムと、後述の待機時間S1および遅れ時間S2を計時する時間Sのタイマ等とが格納されている。
図4に示すように、制御装置30の車体コントローラ32は、出力トルク算出装置32A、ポンプ入力トルク設定装置32Bおよびポンプ容量制御装置32Cを含んで構成されている。出力トルク算出装置32Aは、回転数指示装置33により指示されたエンジン10の目標回転数Ntに基づいて、例えば図6に示す特性線36による出力トルク算出マップからエンジン10の出力トルクTを算出する。
エンジン10の出力トルクTは、エンジン発生トルクと等しいトルクであり、通常は下記の数1式で求められる。ここで、酸素量は、空気圧センサ28で検出される過給圧に基づいた吸入空気量(図12参照)と、温度センサ29で検出される吸入空気の温度とにより求められる。燃料噴射量は、ECU31から燃料噴射装置26に出力する噴射量、即ち噴射時間により求められる。一方、後述の如くエンジン10の過給圧が立ち上がってくるまでの遅れ時間S2の間では、エンジン発生トルクは下記の数2式により求められる。
ポンプ入力トルク設定装置32Bは、油圧ポンプ14の入力トルク(例えば、入力トルクT1,T2,Ta)を、出力トルク算出装置32Aで算出したエンジン10の出力トルク(特性線36で示す出力トルクT)よりも小さな値に余裕代(例えば、後述の余裕代ΔT1,ΔT2,ΔTa)をもって3段階の異なる目標入力トルクとして設定する。このように、油圧ポンプ14の入力トルクを、エンジン10の出力トルクよりも常に小さな値に設定しておくことにより、エンジン10は油圧ポンプ14からの油圧負荷を受けても、エンジンストールを起こす可能性を小さく減じることができる。
ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bにより設定された入力トルクの範囲で、即ち油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係(P−Q特性)が後述の目標トルク特性38〜41を越えないように、図7に示すP−Q特性マップに基づき油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。油圧ポンプ14の入力トルクTi(i=1,2,…)は、油圧ポンプ14の吐出容量Qと吐出圧力Pに対して、定数kとすると下記の数3式に示す関係にある。
図6に示す特性線36は、エンジン10の回転数Nと出力トルクT(即ち、エンジン発生トルク)との関係を表している。これは、エンジン10の性能試験等に基づいて予め知ることができる。図6中の最低回転数N1は、例えば方向制御弁22に代表される全ての方向制御弁を中立位置(I)に戻してエンジン10の油圧負荷を最小にした状態(即ち、油圧ポンプ14およびパイロットポンプ17を回転駆動するエンジン10が無負荷に近い状態)でのアイドル回転数である。このときのエンジン10の出力トルクTは、例えば出力トルクTe1として表される。
規定回転数N2は、最低回転数N1よりも高く、最大トルク発生回転数N3よりも低い回転数である。過給機11付きエンジン10は、回転数Nが規定回転数N2よりも低くなると、低温状態でエンジンストールを起こす可能性がある。このため、ポンプ入力トルク設定装置32Bによる設定値(例えば、入力トルクT2から入力トルクTa)の切替えを行い、低温状態でのエンジンストールの可能性を回避するための回転数として規定回転数N2を表している。
即ち、周囲環境の摂氏温度がマイナスで、それによりエンジン10の温度が低い状態(例えば、冷却水温度が−20℃以下となる状態)では、油圧ポンプ14が作動油タンク15から吸込む作動油の粘度が高い。この状態で、操作レバー23Aを急にフル操作し、方向制御弁22が中立位置(I)から切換位置(II)または(III)に切換えられると、油圧モータ21に圧油が供給されて油圧負荷が急増する。このため、エンジン10は、油圧ポンプ14から受ける負荷が急増し、エンジンストールを起こす可能性がある。規定回転数N2は、このような低温状態でのエンジンストールの可能性を回避するために予め決められた規定の回転数を表している。
この規定回転数N2は、ポンプ入力トルク設定装置32Bにより一定値に(回転数N2〜N3の範囲では)固定された目標入力トルクT2を、回転数N2以下では可変値となる目標入力トルクTaに切替えるための回転数でもある。この目標入力トルクTaは、傾斜線37の如く回転数N1〜N2に応じて可変に設定される目標入力トルクである。規定回転数N2は、エンジン10の性能試験等に基づいて予め決めることができる。図6中に示す特性線36(特性線部36B,36Cの間)のように、エンジン回転数が規定回転数N2のときに、エンジン10の出力トルクTは、例えば出力トルクTe2(Te2>Te1)として表される。ポンプ入力トルク設定装置32Bは、後述の如く目標入力トルクTaを可変に設定する構成である。このため、エンジン10の回転数Nが規定回転数N2以下の場合でも、エンジン10がエンジンストールを起こす可能性を小さく減じることができる。
図6に示すように、最大トルク発生回転数N3は、エンジン10の出力トルクTが最大トルクTmとなるときの回転数を表している。最高回転数N4は、エンジン10の出力トルクTが定格トルクTrのときの回転数Nrよりもさらに高くなって、エンジン10の回転数Nが最も高くなる回転数を表している。定格トルクTrは、最大トルクTmよりも小さく、前記出力トルクTe2,Te1よりも大きいトルク値(Tm>Tr>Te2>Te1)である。
ここで、出力トルク算出装置32Aは、回転数指示装置33により指示されたエンジン10の目標回転数Ntに基づいて、例えば図6に示す出力トルク算出マップ(特性線36)からエンジン10の出力トルクを算出する。即ち、目標回転数Ntを最大トルク発生回転数N3以上に設定した場合、出力トルク算出装置32Aは、最大トルクTm以下となるエンジン10の出力トルクTを、図6中の特性線36(特性線部36A)に基づいて算出する。
目標回転数Ntを回転数N2〜N3に設定した場合に、出力トルク算出装置32Aは、エンジン10の出力トルクTを図6中の特性線36(特性線部36B)に基づいて、例えば、出力トルクTe2〜Tmの範囲で算出する。目標回転数Ntを回転数N1〜N2に設定した場合には、エンジン10の出力トルクTが、例えば図6中の出力トルクTe1〜Te2の範囲で、特性線36の特性線部36Cに基づいて算出される。このときの出力トルクTe1〜Te2を、低域側出力トルクTe(即ち、Te=Te1〜Te2)として総称する。
ポンプ入カトルク設定装置32Bは、エンジン10が回転数N3〜N4の範囲では、エンジン10の定格トルクTrに対して第1の余裕代ΔT1だけ下げた減トルク制御用のトルクを、油圧ポンプ14の第1の目標入力トルクT1として設定する。エンジン10が回転数N2〜N3の範囲では、エンジン10の定格トルクTrに対して第1の余裕代ΔT1よりも大きい第2の余裕代ΔT2(ΔT2>ΔT1)だけ下げた減トルク制御用のトルクを、油圧ポンプ14の第2の目標入力トルクT2として設定する。
さらに、ポンプ入カトルク設定装置32Bは、エンジン10が低い回転数N1〜N2の範囲(低回転数域)で、エンジン10の低域側出力トルクTe(即ち、Te=Te1〜Te2)に対して所定の余裕代ΔTaだけ下げた減トルク制御用のトルクを、油圧ポンプ14の低域側目標入力トルクTaとして設定する。この低域側目標入力トルクTaは、エンジン10が低い回転数N1〜N2の範囲で、低域側出力トルクTeに応じて変化(増減)するトルクであり、図6中に示す傾斜線37に沿って可変に設定されている。この傾斜線37は、特性線36の特性線部36Cに対してほぼ平行な特性線である。しかし、傾斜線37は特性線部36Cに対して必ずしも平行な直線である必要はなく、曲線であってもよく、実験データ等に基づいて決定すればよい。
油圧ポンプ14の低域側目標入力トルクTaは、エンジン10の出力トルク値が出力トルクTe2のとき、目標入力トルクTa2(即ち、Ta2=Te2−ΔTa)に設定される。エンジン10の出力トルク値が出力トルクTe1まで低下したときには、油圧ポンプ14の目標入力トルクTaは、目標入力トルクTa1(即ち、Ta1=Te1−ΔTa)として設定される。このときの目標入力トルクTa1〜Ta2を、低域側目標入力トルクTa(即ち、Ta=Ta1〜Ta2)として総称する。
ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bにより前記第1の目標入力トルクT1が設定されるときに、図7に示す目標トルク特性38よりも小さい範囲で、油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。このときの目標トルク特性38は、前記目標入力トルクT1に基づいて定められるトルク特性(前記数3式参照)である。また、ポンプ入力トルク設定装置32Bにより前記第2の目標入力トルクT2が設定されるときには、図7に示す目標トルク特性39よりも小さい範囲で、油圧ポンプ14の吐出容量Qは吐出圧力Pに応じて可変に制御される。目標トルク特性39は、前記目標入力トルクT2に基づいて定められるトルク特性(前記数3式参照)である。
目標トルク特性38,39は、油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係がそれぞれエンジン10の馬力曲線(即ち、目標入力トルクT1,T2)に基づいたP−Q特性となるように、レギュレータ16を介して油圧ポンプ14の容量制御を行うための特性である。これは、前記数3式を満たす関係である。なお、以下で説明する目標トルク特性40〜41も、これと同様である。
エンジン10の低回転数域において、ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bによる低域側目標入力トルクTaに従って減トルク制御を行う。即ち、ポンプ入力トルク設定装置32Bにより低域側目標入力トルクTaが設定されるときに、例えば図7に示す低域側目標トルク特性40よりも小さい範囲で、油圧ポンプ14の吐出容量Qは吐出圧力Pに応じて可変に制御される。低域側目標トルク特性40は、低域側目標入力トルクTaに基づいて定められる可変なトルク特性である。
この場合、低域側目標入力トルクTaは、目標入力トルクTa1〜Ta2の範囲で可変に設定されるトルク値である。このため、低域側目標トルク特性40は、図7中に実線で示す目標トルク特性39と、図7中に点線で示す目標トルク特性41との間で、それぞれ矢印で示すように変化する可変な特性となっている。
具体的には、エンジン10の目標回転数Ntを最低回転数N1側から規定回転数N2に向けて増加させ、油圧ポンプ14の低域側目標入力トルクTaが、図6に示す目標入力トルクTa2に近付くときには、図7中に実線で示す目標トルク特性40は、目標トルク特性39に漸次接近するように近付く。低域側目標入力トルクTaが目標入力トルクTa2と一致するときは、目標トルク特性40が目標トルク特性39と同じ特性となる。一方、エンジン10の目標回転数Ntを最低回転数N1に向けて低下させ、油圧ポンプ14の目標入力トルクTaが、図6に示す目標入力トルクTa1に近付くときには、低域側目標トルク特性40が図7中に点線で示す目標トルク特性41に近付いた特性となる。目標入力トルクTaが目標入力トルクTa1と一致するときは、低域側目標トルク特性40が目標トルク特性41と同じ特性となる。
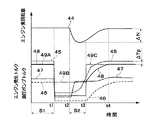
次に、図9は油圧ポンプ14のポンプトルク(入力トルク)をレギュレータ16で減トルク制御する場合の特性線42,43,44を示している。このうち、特性線42は、操作弁23の操作時に発生するパイロット二次圧の特性を示している。図9中の時刻t1〜t2までは、操作レバー23Aが非操作(中立)状態であり、時刻t2以降は、操作レバー23Aが急操作されることにより、パイロット二次圧は、特性線42の如く立ち上がっている。特性線43は、油圧ポンプ14のポンプトルク特性を示し、特性線44は、エンジン10の実回転数特性を示している。
エンジン10の実回転数は、特性線44のように、時刻t2〜t3の間で目標回転数Ntに対応する実回転数に対して回転数差ΔNだけラグダウン(一時的に低下)している。しかし、このラグダウンによる回転数差ΔNは、例えば150〜180rpm程度となって小さいため、油圧ショベル1の作業性、操作性に悪影響を及ぼすようなラグダウンとはならない。
車体コントローラ32は、操作弁23(操作レバー23A)の非操作状態が所定の監視時間S1以上となったとき(即ち、時刻t1〜t2)に、油圧ポンプ14のポンプトルク(即ち、入力トルク)を最大ポンプトルクTHに代えて、この最大ポンプトルクTHよりも低い低ポンプトルクTLとするようにレギュレータ16を減トルク制御する第1のポンプトルク制御部と、後述する第2,第3のポンプトルク制御部とを備えている。
第2のポンプトルク制御部は、前記第1のポンプトルク制御部でレギュレータ16が低ポンプトルクTLとなるように減トルク制御されている間に、操作弁23(操作レバー23A)が非操作状態から操作状態となった場合、エンジン10の過給圧(吸入空気量)が立ち上がってくるまでの遅れ時間S2の間(即ち、時刻t2〜t3)は、前記第1のポンプトルク制御部による低ポンプトルクTLを保持させる制御を実行する。
ここで、前記第2のポンプトルク制御部における低ポンプトルクTLは、操作レバー23Aの急操作時に作業性、操作性に悪影響を及ぼさない程度のポンプトルクに設定されている。また、前記遅れ時間S2は、予め求められた最大ポンプトルクTHをエンジン10に急負荷したときの過給圧(図10中の特性線46)の立ち上がり時間に基づいて設定される。
第3のポンプトルク制御部は、予め求められたエンジン10の燃料噴射量、過給圧(吸入空気量)、過給圧(吸入空気量)の立ち上がり特性により算出されたエンジン発生トルク(前記数2式参照)に基づいて、前記遅れ時間S2の経過後に、エンジン発生トルクの目標値に相当する制御信号をレギュレータ16に出力させ、前記第2のポンプトルク制御部による低ポンプトルクTLから最大ポンプトルクTHまで増トルクさせる制御を実行する。
即ち、前記第3のポンプトルク制御部は、予め求められたエンジン10の燃料噴射量、過給圧、過給圧の立ち上がり特性より算出された経過時間あたりのエンジン発生トルク(前記数2式参照)に基づき、エンジン発生トルク(図10中の特性線45)を超えない(少なくとも余裕代ΔTp分だけ小さい特性となる)ように、経過時間あたりのポンプトルク(特性線48)を算出して制御信号をレギュレータ16に出力させ、前記第2のポンプトルク制御部による低ポンプトルクTLから最大ポンプトルクTHまで増トルクさせる制御を行う。
図10中に点線で示す特性線45は、エンジン10の出力トルク(即ち、エンジン発生トルク)の特性であり、前記数1,数2式により推定演算して求められる。このとき、吸入空気の過給圧は、破線で示す特性線46の如き特性であり、燃料噴射量は一点鎖線で示す特性線47の如き特性となる。油圧ポンプ14のポンプトルク(即ち、入力トルク)は、実線で示す特性線48のように、エンジン発生トルク(特性線45)に対して少なくとも余裕代ΔTp分だけ小さい特性に設定される。二点鎖線で示す特性線49A,49B,49Cは、最大ポンプトルクTHの特性を表している。
ポンプ容量制御装置32Cは、例えばポンプ入力トルク設定装置32Bにより最大ポンプトルクTHが目標入力トルクとして設定されるときに、図11に示す目標トルク特性50よりも小さい範囲で、油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。このときの目標トルク特性50は、最大ポンプトルクTHに基づいて定められるトルク特性である。
また、ポンプ入力トルク設定装置32Bにより低ポンプトルクTLが目標入力トルクとして設定されるときに、ポンプ容量制御装置32Cは、図11に示す目標トルク特性51よりも小さい範囲で、油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。このときの目標トルク特性51は、低ポンプトルクTLに基づいて定められるトルク特性である。図12中に示す特性線52は、空気圧センサ28で検出される過給圧と吸入空気量とがリニア(比例)な関係にあることを表している。
なお、図2に示す熱交換器53は、エンジン10の右側に位置して旋回フレーム6上に設けられている。この熱交換器53は、例えばラジエータ、オイルクーラ、インタクーラ等を含んで構成され、エンジン10等の冷却を行うと共に、作動油タンク15に戻される圧油(作動油)を冷却する機能も有している。
第1の実施の形態による小型の油圧ショベル1のポンプトルク制御装置は、上述の如き構成を有するもので、次に、その作動について説明する。
まず、油圧ショベル1のオペレータは、上部旋回体4のキャブ8に搭乗し、エンジン10を始動して油圧ポンプ14とパイロットポンプ17を駆動する。これにより、油圧ポンプ14から吐出管路19に向けて圧油が吐出され、この圧油は方向制御弁22を介して油圧モータ21に供給される。また、これ以外の方向制御弁(図示せず)からは他の油圧アクチュエータ(例えば、前記スイングシリンダ、ブームシリンダ5E、アームシリンダ5Fおよびバケットシリンダ5G等)へと供給される。
キャブ8に搭乗したオペレータが走行用の操作ペダルまたはレバー(例えば、操作レバー23A)を操作したときには、方向制御弁22を介して油圧モータ21に圧油が供給される。これにより、下部走行体2を前進または後退させることができる。一方、キャブ8内のオペレータが作業用の操作レバー(図示せず)を操作することにより、作業装置5を俯仰動させて土砂の掘削作業等を行うことができる。油圧ショベル1は、小型で上部旋回体4による旋回半径が小さいため、例えば市街地等のように狭い作業現場でも、上部旋回体4を旋回駆動しながら作業装置5により側溝堀作業等を行うことができる。このような場合に、エンジン10を負荷の軽い状態で稼働することにより騒音の低減化を図ることができる。
次に、第1の実施の形態による目標回転数に基づく出力トルクと目標入力トルクに従った減トルク制御処理について、図5を参照して説明する。
エンジン10を稼働した状態で処理動作がスタートすると、ステップ1で回転数指示装置33による目標回転数Ntを読込む。次のステップ2では、目標回転数Ntが最大トルク発生回転数N3よりも大きいか否かを判定する。ステップ2で「YES」と判定したときには、目標回転数Ntが最大トルク発生回転数N3よりも大きいので、エンジン10の出力トルクTは、図6中の特性線36のうち特性線部36Aに沿ったトルク値となる。
そこで、次のステップ3では、エンジン10が回転数N3〜N4の範囲でのポンプ入力トルクをポンプ入カトルク設定装置32Bにより第1の目標入力トルクT1として設定する。図6に示すように、第1の目標入力トルクT1は、エンジン10の定格トルクTrに対して第1の余裕代ΔT1だけ下げた一定のトルク値として設定される。
次のステップ4では、第1の目標入力トルクT1に従った減トルク制御をレギュレータ16で実行させる。即ち、ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bにより第1の目標入力トルクT1が設定されたときの目標トルク特性38を図7に示すように求める。このときの目標トルク特性38は、前記目標入力トルクT1に基づいて定められるトルク特性である。この上で、ポンプ容量制御装置32Cは、図7に示す目標トルク特性38よりも小さい範囲で、即ち油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係(P−Q特性)が目標トルク特性38を越えることがないように、レギュレータ16により油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する。
油圧ポンプ14の吐出圧力Pは、例えば油圧モータ21が受ける慣性負荷等に応じて変化するから、レギュレータ16は、油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係が図7に示す目標トルク特性38の範囲を越えないように、油圧ポンプ14の容量可変部14Aを傾転制御するものである。その後は、次のステップ5でリターンし、ステップ1以降の処理を繰返すようにする。
ステップ2で「NO」と判定したときには、目標回転数Ntが最大トルク発生回転数N3以下に設定されているので、次のステップ6では、目標回転数Ntが規定回転数N2よりも大きいか否かを判定する。ステップ6で「YES」と判定したときには、目標回転数Ntが最大トルク発生回転数N3以下で、規定回転数N2よりも大きくなっている。このとき、エンジン10の出力トルクTは、図6中の特性線36のうち特性線部36Bに沿ったトルク値となる。
そこで、次のステップ7では、エンジン10が回転数N2〜N3の範囲でのポンプ入力トルクを、ポンプ入カトルク設定装置32Bにより第2の目標入力トルクT2として設定する。図6に示すように、第2の目標入力トルクT2は、エンジン10の定格トルクTrに対して第2の余裕代ΔT2だけ下げた一定のトルク値として設定される。
次のステップ8では、第2の目標入力トルクT2に従った減トルク制御をレギュレータ16で実行させる。即ち、ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bにより第2の目標入力トルクT2が設定されたときの目標トルク特性39を図7に示すように求める。このときの目標トルク特性39は、前記目標入力トルクT2に基づいて定められるトルク特性である。この上で、ポンプ容量制御装置32Cは、図7に示す目標トルク特性39よりも小さい範囲で、即ち油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係(P−Q特性)が目標トルク特性39を越えることがないように、レギュレータ16により油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する。その後は、次のステップ5でリターンし、ステップ1以降の処理を繰返すようにする。
次に、ステップ6で「NO」と判定したときには、目標回転数Ntが規定回転数N2以下に設定されているので、次のステップ9では、目標回転数Ntに基づくエンジン10の低域側出力トルクTeを、図6中に示す特性線36の特性線部36Cに沿ったトルク値(例えば、出力トルクTe1〜Te2の間のトルク値)として算出する。即ち、出力トルク算出装置32Aは、目標回転数Ntが低い回転数N1〜N2の間で任意の回転数に設定された場合に、このときの低域側出力トルクTeを、特性線36の特性線部36Cによる出力トルクTe1〜Te2の範囲で任意のトルク値として、それぞれの場合毎に逐一的に算出する。
次のステップ10では、エンジン10が低回転数域(回転数N1〜N2)でのポンプ入力トルクを低域側目標入力トルクTaとしてポンプ入カトルク設定装置32Bにより設定する。図6に示すように、低域側目標入力トルクTa(即ち、Ta=Ta1〜Ta2)は、エンジン10の低域側出力トルクTe(即ち、Te=Te1〜Te2)に対して所定の余裕代ΔTaだけ下げたトルク値として設定される。即ち、油圧ポンプ14の低域側目標入力トルクTaは、エンジン10の低回転数域(回転数N1〜N2)で、図6中に示す傾斜線37に沿って可変に設定されるトルク値である。
次のステップ11では、低域側目標入力トルクTa(即ち、Ta=Ta1〜Ta2)に従った減トルク制御をレギュレータ16で実行させる。即ち、ポンプ容量制御装置32Cは、ポンプ入力トルク設定装置32Bにより低域側目標入力トルクTaが設定されたときの目標トルク特性40を図7に示すように求める。このときの目標トルク特性40は、前記目標入力トルクTaに基づいて定められる低域側トルク特性である。しかも、低域側目標入力トルクTaは、目標入力トルクTa1〜Ta2の範囲で可変に設定されるトルク値であるため、低域側目標トルク特性40は、図7中に実線で示す目標トルク特性39と図7中に点線で示す目標トルク特性41との間で、それぞれ矢印で示すように変化する可変な特性となっている。
具体的には、エンジン10の目標回転数Ntを最低回転数N1側から規定回転数N2に向けて増加させ、油圧ポンプ14の低域側目標入力トルクTaが、図6に示す目標入力トルクTa2に近付くときには、図7中に実線で示す低域側目標トルク特性40は、目標トルク特性39に漸次接近するように近付く。そして、低域側目標入力トルクTaが目標入力トルクTa2と一致するときは、目標トルク特性39と同じ特性となる。一方、エンジン10の目標回転数Ntを最低回転数N1に向けて低下させ、油圧ポンプ14の目標入力トルクTaが、図6に示す目標入力トルクTa1に近付くときには、低域側目標トルク特性40が図7中に点線で示す目標トルク特性41に近付いた特性となる。目標入力トルクTaが目標入力トルクTa1と一致するときは、目標トルク特性41と同じ特性となる。
この上で、ポンプ容量制御装置32Cは、図7に示す低域側目標トルク特性40(図7中に実線で示す目標トルク特性39と図7中に点線で示す目標トルク特性41との間の特性)よりも小さい範囲で、レギュレータ16により油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する。油圧ポンプ14の吐出圧力Pは、例えば油圧モータ21が受ける慣性負荷等に応じて変化するから、レギュレータ16は、油圧ポンプ14の吐出圧力Pと吐出容量Qとの関係が前述の如く可変な低域側目標トルク特性40の範囲を越えないように、油圧ポンプ14の容量可変部14Aを傾転制御する。その後は、次のステップ5でリターンし、ステップ1以降の処理を繰返すようにする。
従って、図6に示すように、特性線36によるエンジン10の出力トルクTに対して、油圧ポンプ14の目標入力トルクT1,T2,Taを出力トルクTよりも小さく設定することができ、エンジン10が油圧ポンプ14を駆動するときの油圧負荷が、エンジン10に対し過剰な負荷となって作用するのを防ぐことができる。このため、過給機11付きエンジン10を用いて、該エンジン10の小型化と省エネルギ化を図ることができる上に、エンジン10の低回転数域でもエンジンストールの発生を抑えることができる。
ところで、小型でコンパクトな構造となった小旋回式(小型)の油圧ショベル1は、大型、中型の機種等に比較して作業装置5による土砂の掘削力が相対的に小さくなっており、エンジン10も可能な限り小型化したいという要求がある。このため、本実施の形態では原動機となるエンジン10には過給機11付きのエンジンを用い、該過給機11によって燃料の燃焼効率を高めることにより、高回転数域での出力トルクを増大できるようにしている。
しかし、過給機11付きのエンジン10は、図9に示すように、油圧ポンプ14のポンプトルク(入力トルク)をレギュレータ16で減トルク制御する場合に、例えば操作レバー23Aが非操作状態から急操作されると、一瞬にエンジン回転数の著しい低下(即ち、エンジンラグダウン)が生じることがあり、これを抑えない限り、作業機としての作業性、操作性が低下する。
そこで、第1の実施の形態では、図8に示す制御処理を実行し、エンジンラグダウンを抑制するようにしている。
図8に示す制御処理がスタートすると、ステップ21では、操作弁23の操作レバー23Aが所定の監視時間S1を超えて、非操作状態にあるか否かを判定する。即ち、車体コントローラ32のメモリ32Mに格納されたタイマは、非操作状態の時間Sが監視時間S1を超えているか否かを、S>S1として判定する。ステップ21で「NO」と判定する間は、時間Sが監視時間S1以下となっているので、ステップ21に戻って判定処理を繰返す。
しかし、ステップ21で「YES」と判定したときには、操作レバー23Aが監視時間S1よりも長く非操作状態にあり、油圧ポンプ14の入力トルク、即ちポンプトルクを最小に設定することにより、エンジン10を無負荷に近い状態で運転することができる。このため、次のステップ22では、油圧ポンプ14の入力トルク(ポンプトルク)を図9に示す時刻t1〜t2のように、最大ポンプトルクTHよりも小さい低ポンプトルクとなる第1のポンプトルクに設定する。
次のステップ23では、第1のポンプトルクに従った制御信号を車体コントローラ32からレギュレータ16に出力し、レギュレータ16による油圧ポンプ14の減トルク制御を実行させる。即ち、車体コントローラ32は、ポンプ入力トルク設定装置32Bにより低ポンプトルクTL(第1のポンプトルク)が目標入力トルクとして設定されるときに、ポンプ容量制御装置32Cは、図11に示す目標トルク特性51よりも小さい範囲で、油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。
次のステップ24では、操作検出器34からの検出信号により操作レバー23Aが非操作状態から操作状態になったか否かを判定する。ステップ24で「NO」と判定する間は、前記ステップ22に戻って、これ以降の処理を繰返す。ステップ24で「YES」と判定したときには、操作レバー23Aが非操作状態から操作状態に切換わっているので、次のステップ25に移って、エンジン10の過給圧が図10中の特性線46の如く、立ち上がってくるまでの遅れ時間S2を設定する。
次のステップ26では、前記第1のポンプトルク制御部による低ポンプトルクTLを遅れ時間S2まで保持させる第2のポンプトルク制御(図9中の時刻t2〜t3)を実行する。次のステップ27では、遅れ時間S2が経過したか否かを判定し、「NO」と判定する間は、ステップ26の処理を続行する。ステップ27で「YES」と判定したときには、次のステップ28に移って、エンジン発生トルクの目標値に相当する制御信号をレギュレータ16に出力する。
即ち、ステップ28では、油圧ポンプ14のポンプトルク(即ち、入力トルク)を、図10中に実線で示す特性線48のように、エンジン発生トルク(特性線45)に対して少なくとも余裕代ΔTp分だけ小さい特性に設定するように、エンジン発生トルクの目標値に相当する制御信号をレギュレータ16に出力する。そして、ステップ29では、前記第2のポンプトルク制御(低ポンプトルクTL)から最大ポンプトルクTHまで増トルクさせる第3のポンプトルク制御(図9中の時刻t3〜t4)を実行する。
これにより、車体コントローラ32のポンプ入力トルク設定装置32Bは、目標入力トルクとして最大ポンプトルクTHを設定し、ポンプ容量制御装置32Cは、例えば図11に示す目標トルク特性50よりも小さい範囲で、油圧ポンプ14の吐出容量Qを吐出圧力Pに応じて可変に制御する制御信号をレギュレータ16に出力する。このときの目標トルク特性50は、最大ポンプトルクTHに基づいて定められるトルク特性である。そして、次のステップ30ではリターンし、ステップ21以降の処理を繰返す。
かくして、第1の実施の形態によれば、操作弁23の操作レバー23Aを非操作状態から急操作した場合に、エンジン10の過給圧が立ち上がってくるまでの遅れ時間S2の間は、油圧ショベル1の作業性、操作性に悪影響を与えない程度のラグダウンとなるような低ポンプトルク制御を行い、遅れ時間S2の経過後からは、燃料噴射量、過給圧(吸入空気量)、過給圧(吸入空気量)の立ち上がり特性により算出されたエンジン発生トルクに応じたポンプトルクに制御する。これにより、エンジンラグダウンを抑制することができ、特にダウンサイジングエンジン搭載の油圧ショベル1において作業性、操作性を向上することができる。
また、第1の実施の形態では、ターボ式過給機付きダウンサイジングエンジン(即ち、過給機11付きエンジン10)を用いることにより、例えば排気量が1.5L(リットル)程度のエンジンであっても、例えば2.2L程度のエンジン(過給機なし)と同等の出力特性を有しているために、エンジン10の小型化と省エネルギ化を図ることができる。しかも、エンジン10の低回転数域(回転数N1〜N2)でも、油圧ポンプ14からエンジン10が過負荷を受けるのを抑えることができ、エンジンストールの発生を防ぐことができる。
なお、車体コントローラ32が行う制御処理のうち、図8に示すステップ23は第1のポンプトルク制御部の具体例であり、ステップ25,26は第2のポンプトルク制御部の具体例を示し、ステップ28,29は第3のポンプトルク制御部の具体例を示している。また、図9に示すように、時刻t1〜t2間の制御は第1のポンプトルク制御部が行い、時刻t2〜t3間の制御は、第2のポンプトルク制御部が行い、時刻t3〜t4間の制御は、第3のポンプトルク制御部が実行するものである。
次に、図13および図14は第2の実施の形態を示している。本実施の形態の特徴は、エンジンの吸入空気量を過給機(コンプレッサまたは排気タービン)の回転数から求める構成としたことにある。なお、第2の実施の形態では、前述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
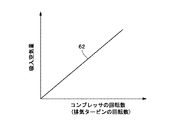
ここで、過給機11のコンプレッサ11Aには、その回転数を検出する非接触式の回転センサ61が設けられている。この回転センサ61は、第1の実施の形態で述べた空気圧センサ28に替えて、エンジン10の吸入空気量を検出するために採用されている。ターボ式過給機11で圧縮された過給圧状態の吸入空気量は、回転センサ61で検出されるコンプレッサ11Aの回転数に対して、例えば図13中に示す特性線62の如く比例した関係となっている。なお、過給機11のコンプレッサ11Aは、排気タービン11Bによって回転駆動されるため、回転センサ61は、排気タービン11Bの回転数を検出する構成としてもよい。
かくして、このように構成される第2の実施の形態では、制御装置30のECU31および/または車体コントローラ32は、回転センサ61で検出されるコンプレッサ11A(または、排気タービン11B)の回転数から図13中に示す特性線62に基づいて、エンジン10の吸入空気量を求めることができる。そして、操作弁23の操作レバー23Aを非操作状態から急操作した場合には、エンジン10の吸入空気量(過給圧)が立ち上がってくるまでの遅れ時間S2を、回転センサ61からの検出信号によって知ることができる。
これによって、遅れ時間S2の間は、油圧ショベル1の作業性、操作性に悪影響を与えない程度のラグダウンとなるような低ポンプトルク制御を行い、遅れ時間S2の経過後からは、燃料噴射量、吸入空気量、吸入空気量の立ち上がり特性により算出されたエンジン発生トルクに応じたポンプトルクに制御する。このため、第1の実施の形態の同様に、エンジンラグダウンを抑制することができ、特にダウンサイジングエンジン搭載の油圧ショベル1において作業性、操作性を向上することができる。
次に、図15は第3の実施の形態を示している。本実施の形態の特徴は、エンジンの吸入空気量を流量計を用いて直接的に検出する構成としたことにある。なお、第3の実施の形態では、前述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
ここで、エンジン10の吸気管10Aには、その内部を流通する吸入空気の流量を検出する流量計71が設けられている。この流量計71は、第1の実施の形態で述べた空気圧センサ28に替えて用いられている。流量計71は、例えばエアフロメータにより構成され、エンジン10の吸入空気量を直接的に検出するものである。
かくして、このように構成される第3の実施の形態では、操作弁23の操作レバー23Aを非操作状態から急操作した場合には、エンジン10の吸入空気量が立ち上がってくるまでの遅れ時間S2を、流量計71からの検出信号によって知ることができる。そして、遅れ時間S2の間は、油圧ショベル1の作業性、操作性に悪影響を与えない程度のラグダウンとなるような低ポンプトルク制御を行い、遅れ時間S2の経過後からは、燃料噴射量、吸入空気量、吸入空気量の立ち上がり特性により算出されたエンジン発生トルクに応じたポンプトルクに制御できる。このため、第1の実施の形態の同様に、エンジンラグダウンを抑制することができ、特にダウンサイジングエンジン搭載の油圧ショベル1において作業性、操作性を向上することができる。
なお、前記各実施の形態では、建設機械としてスイングポスト式の作業装置5を用いる構成とした後方小旋回式の油圧ショベル1を例に挙げて説明した。しかし、本発明はこれに限らず、例えばスイングアーム式の作業装置を用いる型式の油圧ショベル(建設機械)に適用してもよい。また、キャブ8に替えてキャノピを用いて運転席を上方から覆う型式の油圧ショベルであってもよい。また、油圧ショベル以外の建設機械にも広く適用できるものである。