JP6598114B2 - ベルトコンベア及びワークの位置決め方法 - Google Patents
ベルトコンベア及びワークの位置決め方法 Download PDFInfo
- Publication number
- JP6598114B2 JP6598114B2 JP2015240410A JP2015240410A JP6598114B2 JP 6598114 B2 JP6598114 B2 JP 6598114B2 JP 2015240410 A JP2015240410 A JP 2015240410A JP 2015240410 A JP2015240410 A JP 2015240410A JP 6598114 B2 JP6598114 B2 JP 6598114B2
- Authority
- JP
- Japan
- Prior art keywords
- belt
- workpiece
- magnetic force
- positioning
- belt conveyor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Description
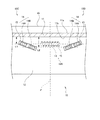
10 ベルトコンベア
10a 駆動輪
10b 従動輪
11 ベルト
11a 搬送面
11b 裏面
12 本体部
13 磁力発生部
13A 磁力発生部(第1の磁力発生部)
13B 磁力発生部(第2の磁力発生部)
13C 磁力発生部(第2の磁力発生部)
14 磁石
14A 磁石
14B 磁石
15 金属プレート(プレート)
16 ガイド
20 ラベル貼付機
21 位置検出センサ
22 ラベル貼付部
30 プリンタ
100 ラベル貼り付けライン
213 磁力発生部
215 金属プレート
Claims (5)
- ワークを搬送するベルトコンベアであって、
載置された前記ワークを搬送する環状のベルトと、
前記ベルトにおける前記ワークの載置される面と反対の面に配置され、前記ワークを引き寄せる磁力を前記ベルト越しに発生させて前記ワークを位置決め位置に位置させ、前記位置決め位置からベルト搬送方向に沿って延びる位置決めラインに配置される第1の磁力発生部と、を備え、
前記ベルトは、搬送方向の下流側から上流側にかけて、前記ベルトの幅方向における端部側から前記位置決めラインに向かって延在するガイドを有する、
ことを特徴とするベルトコンベア。 - 請求項1に記載のベルトコンベアであって、
前記第1の磁力発生部より搬送方向の上流側に複数設けられた第2の磁力発生部を備える、
ことを特徴とするベルトコンベア。 - 請求項2に記載のベルトコンベアであって、
前記第2の磁力発生部は、
複数の磁石を有し、
前記位置決めラインから遠い磁石は、前記位置決めラインから近い磁石よりも、前記ワークを引き寄せる磁力が強い、
ことを特徴とするベルトコンベア。 - 請求項3に記載のベルトコンベアであって、
前記第2の磁力発生部において、前記位置決めラインから遠い磁石は、前記位置決めラインから近い磁石よりも、前記ベルトとの上下方向の距離が近い位置に設けられる、
ことを特徴とするベルトコンベア。 - 環状のベルトを備えるベルトコンベアに搬送されるワークの位置決め方法であって、
前記ベルトにおける前記ワークの載置された面と反対の面に配置された磁力発生部から前記ベルト越しに発生する磁力によって、前記ワークを引き寄せるワーク引き寄せ工程と、
前記ベルトに設けられ、搬送方向の下流側から上流側にかけて、前記ベルトの幅方向における端部側から前記ワークの位置決めラインに向かって延在するガイドが、前記磁力によって引き寄せられる前記ワークに接触し、位置決め位置に位置させるワーク位置決め工程と、
を含むことを特徴とするワークの位置決め方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240410A JP6598114B2 (ja) | 2015-12-09 | 2015-12-09 | ベルトコンベア及びワークの位置決め方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015240410A JP6598114B2 (ja) | 2015-12-09 | 2015-12-09 | ベルトコンベア及びワークの位置決め方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017105580A JP2017105580A (ja) | 2017-06-15 |
| JP6598114B2 true JP6598114B2 (ja) | 2019-10-30 |
Family
ID=59058861
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015240410A Active JP6598114B2 (ja) | 2015-12-09 | 2015-12-09 | ベルトコンベア及びワークの位置決め方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6598114B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111498448A (zh) * | 2019-11-18 | 2020-08-07 | 杭州曼京科技有限公司 | 一种物流领域带排位的输送机构 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BR112020024816A2 (pt) * | 2018-06-06 | 2021-03-02 | Doben Limited | transportador magnético de peça de trabalho para célula de soldagem robótica |
-
2015
- 2015-12-09 JP JP2015240410A patent/JP6598114B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111498448A (zh) * | 2019-11-18 | 2020-08-07 | 杭州曼京科技有限公司 | 一种物流领域带排位的输送机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017105580A (ja) | 2017-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100880877B1 (ko) | 자기부상형 기판 이송장치 | |
| JP6598114B2 (ja) | ベルトコンベア及びワークの位置決め方法 | |
| US4107653A (en) | Document processing, magnetic character detecting apparatus | |
| JP2009012851A (ja) | ラベル剥離方法およびラベル剥離装置 | |
| CN109922900A (zh) | 定位弯曲工具的装置 | |
| CN103449096A (zh) | 电磁永磁混合悬浮带式输送机 | |
| JP2009166952A (ja) | 用紙搬送装置 | |
| JP4542905B2 (ja) | コンベヤシステム | |
| KR101318173B1 (ko) | 기판 이송 장치 | |
| JP2009220956A (ja) | 浮上搬送装置と浮上搬送方法 | |
| JP7122766B2 (ja) | 電磁ホルダ | |
| CN114599596B (zh) | 被输送体、容器载体以及输送装置 | |
| JP2006206229A (ja) | 磁性物品振分け搬送装置 | |
| KR101753216B1 (ko) | 자력조절장치 | |
| CN109643034B (zh) | 用于制造显示单元的系统 | |
| US20070046407A1 (en) | Sheet magnetizer systems and methods thereof | |
| JP6343848B2 (ja) | シート貼付装置およびシート貼付方法 | |
| JP2001231242A (ja) | リニア直流モータ搬送機 | |
| JP4002988B2 (ja) | 異物検知方法及び異物検知装置 | |
| JPH05131774A (ja) | 針金綴込みされた刷本の針金検知方法及びその装置 | |
| WO2023228583A1 (ja) | 搬送装置 | |
| KR102251764B1 (ko) | 자기부상 반송장치 | |
| JP2531220Y2 (ja) | 物品の搬送装置 | |
| JPH0585620A (ja) | 物品の磁気式搬送装置 | |
| KR101724388B1 (ko) | 이송 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160106 |
|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20160106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190821 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6598114 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |