JP6592187B2 - ハイブリッド建設機械 - Google Patents
ハイブリッド建設機械 Download PDFInfo
- Publication number
- JP6592187B2 JP6592187B2 JP2018508790A JP2018508790A JP6592187B2 JP 6592187 B2 JP6592187 B2 JP 6592187B2 JP 2018508790 A JP2018508790 A JP 2018508790A JP 2018508790 A JP2018508790 A JP 2018508790A JP 6592187 B2 JP6592187 B2 JP 6592187B2
- Authority
- JP
- Japan
- Prior art keywords
- pump
- output
- flow rate
- power
- power storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K6/485—Motor-assist type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
- B60W10/103—Infinitely variable gearings of fluid type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/2075—Control of propulsion units of the hybrid type
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/04—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/06—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving electric generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K2006/4825—Electric machine connected or connectable to gearbox input shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2300/00—Indexing codes relating to the type of vehicle
- B60W2300/17—Construction vehicles, e.g. graders, excavators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Description
〜ショベル全体の説明〜
図1は、本発明の参考例としての実施の形態に係わる建設機械の一例としてハイブリッド油圧ショベルの外観を示す図である。
図2はハイブリッド油圧ショベルのハイブリッドシステムの構成を示す図である。
図3は、本実施の形態におけるハイブリッド油圧ショベルの油圧システム概略を示す図である。
レギュレータ18は、油圧ポンプ9の押しのけ容積変更部材(例えば斜板)を駆動するポンプアクチュエータ51と、このポンプアクチュエータ51に導かれる駆動圧を制御して油圧ポンプの押しのけ容積(例えば斜板の傾転角、以下適宜傾転角という)を制御するポンプ馬力制御弁52及びポンプ流量制御弁53とを有している。
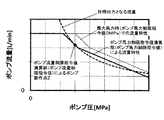
図4はポンプ馬力制御弁52によるポンプ馬力制限の動作説明図である。
図5はポンプ流量制御弁53によるポンプ流量制御の動作説明図である。
また、油圧システムの油圧回路には、複数の操作装置15からの操作圧(パイロット圧)を検出する複数の操作圧センサ15b(図3では便宜上1つのみ図示)と、油圧ポンプ9の吐出圧(ポンプ圧)を検出するポンプ圧センサ9aと、複数のアクチュエータの圧力(アクチュエータ圧)を検出する複数のアクチュエータ圧センサ10a(図3では便宜上1つのみ図示)が設けられており、それぞれ検出信号を機体コントローラ13に出力する。
表示装置5は、油圧ショベルに関する各種の情報を表示する表示部5aと、各種操作入力を行うための表示操作部5bとを備えており、各種情報の表示や操作を図示しない表示コントローラにより制御している。なお、表示部5aをタッチパネル式の液晶モニタとして表示操作部5bを兼ねる構成としてもよい。
図6は、本発明の参考例としての実施の形態におけるポンプ制御装置の制御構成を示す図である。コントローラ13は、ポンプ制御装置19を機能の一部として含んでいる。さらにポンプ制御装置19は、蓄電装置12a状態値監視部も兼ねる車体出力制限値演算部20、ポンプ目標出力演算部21、ポンプ流量制限指令値演算部22、ポンプ馬力制限指令値演算部23を備えている。
図7は、本発明の参考例としての実施の形態における車体出力制限値演算部20の制御内容を示す図である。
図9は、本発明の参考例としての実施の形態におけるポンプ目標出力演算部21の制御内容を示す図である。
図11は、本発明の参考例としての実施の形態におけるポンプ流量制限指令値演算部22の制御内容を示す図である。
図12は、本発明の参考例としての実施の形態におけるポンプ馬力制限指令値演算部23の制御内容を示す図である。
図13は、ポンプ流量制限指令値演算部22とポンプ馬力制限指令値演算部23を併用することによる効果を説明する図である。
油圧ショベルの典型的な作業の1つとして、地面を掘削し、ダンプに砂利や土を積み込む掘削積み込み作業がある。この作業では、掘削、旋回ブーム上げ、放土、旋回戻り、掘削・・・という動作サイクルを繰り返す。ここで、掘削と旋回ブーム上げに着目すると、これらの動作は蓄電装置12aからの電力供給による発電電動機のアシストが必要となる高負荷動作であり、また、一般に旋回ブーム上げの方が掘削よりも要求されるポンプ出力が高い。
本発明の一実施の形態を説明する。主な構成は参考例としての実施の形態と同様である。参考例としての実施の形態と異なる部分について説明する。
本発明の参考例としての実施の形態と本発明の一実施の形態とでは、ポンプ目標出力演算部21の処理内容が異なる。
以上のように構成した本発明の一実施の形態においても、参考例としての実施の形態と同様の効果が得られる。
1.上記の実施の形態では、ポンプ目標出力演算部2のポンプ要求パワー演算部21a及びポンプ流量制限指令値演算部22の要求流量演算部22aにおいて、ポンプ要求パワー或いはポンプ要求流量を演算するための作業に係わる情報として操作圧(操作信号)を用いたが、操作圧に代え、或いは操作圧と併用して油圧ポンプ9の吐出圧、油圧アクチュエータ3の駆動圧、作業の種類の設定情報などの情報を用いてもよい。
200 上部旋回体
300 フロント作業機
3a ブーム
3b アーム
3c バケット
3d ブームシリンダ
3e アームシリンダ
3f バケットシリンダ
3g 旋回油圧モータ
3h 走行油圧モータ
4a 運転室
5 表示装置
6 エンジン
7 エンジンコントロールユニット(ECU)
8a 第1のインバータ
8b 発電電動機
9 油圧ポンプ
9a ポンプ圧センサ
10 コントロールバルブ
10a アクチュエータ圧センサ
11a 第2のインバータ
11b 旋回電動モータ
12a 蓄電装置12a(リチウムイオンバッテリ)
12b バッテリコントロールユニット(BCU)(充電制御装置)
13 機体コントローラ
14 エンジンコントロールダイヤル(ECダイヤル)
15 操作装置
15a 操作レバー
15b 操作圧センサ
16 パイロットポンプ
17 操作圧制御弁
18 レギュレータ
18a ポンプ馬力制限電磁弁
18b ポンプ流量制限電磁弁
19 ポンプ制御装置
20 車体出力制限値演算部
21 ポンプ目標出力演算部
22 ポンプ流量制限指令値演算部
23 ポンプ馬力制限指令値演算部
51 ポンプアクチュエータ
52 ポンプ馬力制御弁
53 ポンプ流量制御弁
Claims (6)
- エンジンと、
少なくとも1つの発電電動機と、
前記発電電動機を発電動作させるときに充電し、前記発電電動機を力行動作させるときに放電する蓄電装置と、
前記蓄電装置の蓄電状態を演算し前記蓄電装置を監視する蓄電制御装置と、
前記エンジン及び前記発電電動機のトルクで駆動する可変容量式の油圧ポンプと、
前記油圧ポンプの吐出油によって駆動する複数の油圧アクチュエータと、
前記複数の油圧アクチュエータに対して操作量に応じた操作信号を出力し各油圧アクチュエータの動作を指示する複数の操作装置と、
前記発電電動機の充電電力及び放電電力と前記油圧ポンプの吐出流量と出力を制御するコントローラと、
前記油圧ポンプの押しのけ容積を制御し、前記油圧ポンプの吐出流量を制御するレギュレータとを備えたハイブリッド建設機械において、
前記コントローラは、前記油圧ポンプの現在のポンプ目標出力を演算するポンプ目標出力演算部と、前記油圧ポンプの吐出流量と出力を制御するポンプ流量制限指令値を演算するポンプ流量制限指令値演算部とを有し、
前記ポンプ目標出力演算部は、
前記蓄電装置の蓄電状態に応じたポンプ要求パワーの制限を行う下限のポンプ出力としてのポンプ最小パワーであるポンプ出力制限有効閾値と、前記蓄電装置の蓄電状態が前記ポンプ出力制限有効閾値以上にある通常状態に対応するポンプ最大パワーであるポンプ出力制限最大値と、前記蓄電装置の現在の蓄電状態に対応するポンプ出力であるポンプ出力制限値とを演算し、
更に、前記ポンプ出力制限最大値と前記ポンプ出力制限有効閾値との差分に対する前記ポンプ出力制限値と前記ポンプ出力制限有効閾値との差分が占める比率を前記蓄電装置の蓄電状態の低下度合いを示す制限比率として演算し、
前記ポンプ目標出力演算部は、また、
作業に係わる情報に基づいて前記蓄電装置の蓄電状態によらない値として前記油圧ポンプの現在のポンプ要求パワーを演算するとともに、
前記蓄電制御装置から取得した前記蓄電装置の蓄電状態が予め設定された閾値よりも低下したとき、前記蓄電装置の蓄電状態の低下度合いに応じて前記現在のポンプ要求パワーを制限するため、前記現在のポンプ要求パワーのうち前記ポンプ出力制限有効閾値以上の出力部分である前記現在のポンプ要求パワーと前記ポンプ出力制限有効閾値の差分に前記制限比率を乗じて前記現在のポンプ目標出力を演算し、
前記ポンプ流量制限指令値演算部は、前記現在のポンプ目標出力に基づいて、前記油圧ポンプの出力が前記現在のポンプ目標出力を超えないように前記ポンプ流量制限指令値を演算し、
前記レギュレータは、前記ポンプ流量制限指令値に基づいて前記油圧ポンプの押しのけ容積を制御し、前記油圧ポンプの吐出流量を制御することを特徴とするハイブリッド建設機械。 - 請求項1記載のハイブリッド建設機械において、
前記ポンプ目標出力演算部は、
前記ポンプ出力制限有効閾値として、前記発電電動機のアシストを必要とせず、前記エンジン単体で駆動可能な前記油圧ポンプの定常出力を演算し、
前記ポンプ出力制限最大値として、前記エンジンの最大出力と前記発電電動機のアシスト最大出力の和による、車体としてのポンプ最大出力を演算し、
前記ポンプ出力制限値として、前記蓄電装置の現在の蓄電状態におけるポンプ最大出力を演算することを特徴とするハイブリッド建設機械。 - 請求項1記載のハイブリッド建設機械において、
前記エンジンの現在の回転数における最大出力と前記蓄電装置の現在の蓄電状態における前記発電電動機の最大出力とに基づいて車体として許容できる車体出力制限値を演算する車体出力制限値演算部を更に備え、
前記ポンプ目標出力演算部は、前記車体出力制限値に基づいて前記ポンプ出力制限値を演算することを特徴とするハイブリッド建設機械。 - 請求項1記載のハイブリッド建設機械において、
前記複数の操作装置の操作信号を検出する複数の操作信号センサを更に備え、
前記作業に係わる情報は前記複数の操作信号センサによって検出された複数の操作信号であり、
前記ポンプ目標出力演算部は、前記複数の操作信号のそれぞれに応じた複数のポンプ要求パワーの特性であって、前記複数の操作圧に対応する油圧アクチュエータの駆動及び作業の種類に応じて最適の最大要求パワーを有する複数のポンプ要求パワーの特性を設定した複数の制御テーブルを有し、この複数の制御テーブルを用い、前記複数の操作信号に基づいて前記現在のポンプ要求パワーを演算することを特徴とすることを特徴とするハイブリッド建設機械。 - 請求項1記載のハイブリッド建設機械において、
前記複数の操作装置の操作信号を検出する複数の操作信号センサを更に備え、
前記レギュレータは、
前記油圧ポンプの吐出圧が導かれ、前記油圧ポンプの吸収馬力が基準最大馬力を超えないように前記油圧ポンプの吐出流量を制限するポンプ馬力制御弁と、
前記ポンプ流量制限指令値演算部で演算された前記ポンプ流量制限指令値に基づいて前記油圧ポンプの吐出流量を制御するポンプ流量制御弁とを有し、
前記ポンプ流量制限指令値演算部は、前記複数の操作信号と前記現在のポンプ目標出力に基づいてポンプ流量目標値を演算し、このポンプ流量目標値を前記油圧ポンプの目標容量に変換して前記ポンプ流量制限指令値を演算し、
前記コントローラは、
前記ポンプ馬力制御弁によって制限された前記油圧ポンプの吐出流量が前記ポンプ流量制限指令値演算部で演算された前記ポンプ流量目標値に一致するよう前記ポンプ馬力制御弁を制御するためのポンプ馬力制限指令値を演算するポンプ馬力制限指令値演算部を更に有することを特徴とするハイブリッド建設機械。 - 請求項1記載のハイブリッド建設機械において、
前記エンジンの現在の回転数における最大出力と前記蓄電装置の現在の蓄電状態における前記発電電動機の最大出力とに基づいて車体として許容できる車体出力制限値を演算する車体出力制限値演算部を更に備え、
前記ポンプ目標出力演算部は、前記車体出力制限値に基づいて前記蓄電装置の現在の蓄電状態に対応するポンプ出力であるポンプ出力制限値を演算し、このポンプ出力制限値に基づいて前記蓄電装置の蓄電状態の低下度合いに応じて前記現在のポンプ要求パワーを制限する演算を行い、前記現在のポンプ目標出力を演算することを特徴とするハイブリッド建設機械。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/078950 WO2018061166A1 (ja) | 2016-09-29 | 2016-09-29 | ハイブリッド建設機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2018061166A1 JPWO2018061166A1 (ja) | 2018-10-18 |
| JP6592187B2 true JP6592187B2 (ja) | 2019-10-16 |
Family
ID=61759346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018508790A Active JP6592187B2 (ja) | 2016-09-29 | 2016-09-29 | ハイブリッド建設機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10668802B2 (ja) |
| EP (1) | EP3524482B1 (ja) |
| JP (1) | JP6592187B2 (ja) |
| KR (1) | KR102035517B1 (ja) |
| CN (1) | CN108137035B (ja) |
| WO (1) | WO2018061166A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180363272A1 (en) * | 2017-06-20 | 2018-12-20 | KUBOTA DEUTSCHLAND GmbH | Working machine |
| JP7461928B2 (ja) * | 2019-03-11 | 2024-04-04 | 住友建機株式会社 | ショベル及びショベルの制御方法 |
| KR102153626B1 (ko) * | 2019-04-04 | 2020-09-08 | 울산대학교 산학협력단 | 다중 동력원을 갖는 차량의 동력제어방법 |
| CN110217735B (zh) * | 2019-04-30 | 2021-05-18 | 格林美(武汉)城市矿产循环产业园开发有限公司 | 一种高空作业车低电量处理方法 |
| US11846085B2 (en) * | 2020-02-17 | 2023-12-19 | Deere & Company | Energy management system for a hybrid vehicle with an electrically powered hydraulic system |
| SE545533C2 (en) * | 2021-03-04 | 2023-10-17 | Husqvarna Ab | A hydraulic system for construction machines and a method for controlling the hydraulic system |
| US11820361B2 (en) | 2021-11-30 | 2023-11-21 | Deere & Company | Transmission assembly with electrical machine unit for improved shift quality |
| CN115324148B (zh) * | 2022-08-17 | 2023-06-16 | 三一重机有限公司 | 电动工程机械的故障保护控制方法、装置及电动工程机械 |
| US11913528B1 (en) | 2022-10-28 | 2024-02-27 | Deere & Company | Multi-mode continuously variable transmission assembly with drop set arrangement |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3859982B2 (ja) * | 2001-04-27 | 2006-12-20 | 株式会社神戸製鋼所 | ハイブリッド建設機械の電力制御装置 |
| JP3833573B2 (ja) | 2002-06-06 | 2006-10-11 | 新キャタピラー三菱株式会社 | ハイブリッド式建設機械 |
| JP3941951B2 (ja) | 2003-09-08 | 2007-07-11 | 株式会社小松製作所 | ハイブリッド作業機械の駆動制御装置 |
| JP4413122B2 (ja) * | 2004-10-13 | 2010-02-10 | 日立建機株式会社 | 油圧建設機械の制御装置 |
| JP4563302B2 (ja) | 2005-11-25 | 2010-10-13 | 三菱重工業株式会社 | 電力配分制御装置およびハイブリッド建設機械 |
| US8948944B2 (en) * | 2010-01-29 | 2015-02-03 | Sumitomo Heavy Industries, Ltd. | Hybrid-type construction machine |
| JP5511425B2 (ja) * | 2010-02-12 | 2014-06-04 | カヤバ工業株式会社 | ハイブリッド建設機械の制御装置 |
| JP5690604B2 (ja) | 2011-02-01 | 2015-03-25 | 日立建機株式会社 | 作業機械 |
| JP2012233312A (ja) * | 2011-04-28 | 2012-11-29 | Kobelco Contstruction Machinery Ltd | ハイブリッド作業機械 |
| US9487932B2 (en) * | 2012-05-14 | 2016-11-08 | Hitachi Construction Machinery Co., Ltd. | Hybrid construction machine |
| CN104395537B (zh) * | 2012-06-22 | 2016-11-16 | 日立建机株式会社 | 工程机械 |
| JP5948165B2 (ja) * | 2012-06-28 | 2016-07-06 | 川崎重工業株式会社 | 馬力制限装置及び馬力制限方法 |
| JP6122765B2 (ja) | 2013-11-01 | 2017-04-26 | 日立建機株式会社 | 作業機械 |
| US20170291501A1 (en) * | 2014-10-14 | 2017-10-12 | Hitachi Construction Machinery Co., Ltd. | Hybrid Construction Machinery |
| JP6388285B2 (ja) | 2015-03-03 | 2018-09-12 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP6539462B2 (ja) * | 2015-03-10 | 2019-07-03 | 日立建機株式会社 | ハイブリッド作業機械 |
-
2016
- 2016-09-29 US US15/755,983 patent/US10668802B2/en active Active
- 2016-09-29 CN CN201680048437.XA patent/CN108137035B/zh active Active
- 2016-09-29 JP JP2018508790A patent/JP6592187B2/ja active Active
- 2016-09-29 WO PCT/JP2016/078950 patent/WO2018061166A1/ja active Application Filing
- 2016-09-29 KR KR1020187004797A patent/KR102035517B1/ko active IP Right Grant
- 2016-09-29 EP EP16913634.8A patent/EP3524482B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3524482A1 (en) | 2019-08-14 |
| KR20180050299A (ko) | 2018-05-14 |
| WO2018061166A1 (ja) | 2018-04-05 |
| CN108137035A (zh) | 2018-06-08 |
| EP3524482B1 (en) | 2023-04-19 |
| US10668802B2 (en) | 2020-06-02 |
| CN108137035B (zh) | 2020-10-20 |
| US20190111773A1 (en) | 2019-04-18 |
| KR102035517B1 (ko) | 2019-10-24 |
| EP3524482A4 (en) | 2020-08-19 |
| JPWO2018061166A1 (ja) | 2018-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6592187B2 (ja) | ハイブリッド建設機械 | |
| US9187294B2 (en) | Hybrid construction machine and method for controlling the same | |
| JP4719750B2 (ja) | 作業機械の制御装置 | |
| US10315508B2 (en) | Hybrid work machine | |
| KR101834598B1 (ko) | 하이브리드식 건설 기계 | |
| JP5665874B2 (ja) | ハイブリッド型作業機械及びその制御方法 | |
| KR101714948B1 (ko) | 건설 기계 | |
| US20130090835A1 (en) | Construction machine | |
| JP5974014B2 (ja) | ハイブリッド駆動式の油圧作業機械 | |
| JP6539462B2 (ja) | ハイブリッド作業機械 | |
| KR20090125790A (ko) | 하이브리드 건설 기계의 제어 방법 및 하이브리드 건설 기계 | |
| KR101804433B1 (ko) | 건설 기계 | |
| JP6626371B2 (ja) | ハイブリッド作業機械 | |
| CN103661359A (zh) | 混合动力式工程机械 | |
| KR101942674B1 (ko) | 하이브리드 건설 기계 | |
| JP6382023B2 (ja) | 動力制御装置及びこれを備えたハイブリッド建設機械 | |
| JP2015214808A (ja) | 建設機械 | |
| WO2020039862A1 (ja) | ハイブリッド建設機械 | |
| WO2020044921A1 (ja) | ハイブリッド建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190919 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6592187 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |