JP6586312B2 - 車輪ユニット、およびそれを備えた手押し移動体 - Google Patents
車輪ユニット、およびそれを備えた手押し移動体 Download PDFInfo
- Publication number
- JP6586312B2 JP6586312B2 JP2015142135A JP2015142135A JP6586312B2 JP 6586312 B2 JP6586312 B2 JP 6586312B2 JP 2015142135 A JP2015142135 A JP 2015142135A JP 2015142135 A JP2015142135 A JP 2015142135A JP 6586312 B2 JP6586312 B2 JP 6586312B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- clutch plate
- plate
- clutch
- operation knob
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Landscapes
- Mechanical Operated Clutches (AREA)
Description
このような構成において、モータと車輪との連結を解除するときには、モータ側のギヤと車輪側の回転部材に形成された内歯とが噛み合った状態から、スライド部材を車軸方向に押し込む。すると、コイルバネが圧縮されるとともに、ギヤが車軸方向に移動してギヤと内歯との噛み合いが解除され、モータと車輪との連結が遮断される。車軸方向に押し込んだスライド部材は、軸回りに回転させることでロックされ、ギヤと内歯ギヤとの噛み合いが解除された状態を維持する。
このような構成において、モータと車輪とを連結するときには、つまみを車軸方向に押し込みながら回すことによって、バネを圧縮する。すると、このバネのバネ力によってモータ側のドグが車輪側の係合穴に向かって押圧されて移動し、車輪側の係合穴に係合してモータと車輪とが連結される。
ここで、ドグと係合穴とが噛み合わない場合、車輪を回転させる。すると、ドグと係合穴とが合致したときに、バネの押圧力によって、ドグが係合穴に飛び込んで係合する。
このような構成において、モータと車輪とを連結するときには、ノブをねじ込むことによってキーを係止溝に沿って移動させ、車輪側に形成されたキー溝に係合させる。これによって、キーを介して車輪側のキー溝とモータ側の係止溝とが係合し、モータと車輪とが連結される。
ここで、ノブをねじ込んでもキーとキー溝とが合わないときには、ノブとキーとの間に設けられたコイルスプリングが圧縮し、キーをキー溝側に付勢する。そして、車輪が回転し、キーとキー溝とが合致したときに、コイルスプリングの付勢力によって、キーがキー溝に飛び込んで係合する。
つまり、スライド部材、つまみ、ノブ等の操作部材を操作することによって、操作者側ではモータ側と車輪側とが連結されていると認識しているにも関わらず、実際には、モータ側と車輪側とが連結されていないことがある。
すなわち、本発明の車輪ユニットは、駆動軸を回転させるモータと、前記駆動軸に対して相対回転可能に支持された車輪と、前記車輪に前記駆動軸の回転力を伝達するアシスト状態と、前記車輪への前記駆動軸の回転力の伝達を遮断するフリー状態とに切替可能なクラッチ機構と、を備え、前記クラッチ機構は、前記駆動軸と一体に回転するとともに、前記駆動軸の軸方向に移動可能に設けられたクラッチプレートと、前記車輪と一体に設けられ、前記クラッチプレートに噛合可能なスプラインプレートと、前記クラッチプレートを前記駆動軸の軸方向に沿って前記スプラインプレートとの噛合位置に向かって移動させる操作部材と、前記クラッチプレートを前記操作部材に向かって付勢する付勢部材と、を備え、前記操作部材は、前記クラッチプレートが前記スプラインプレートと噛み合ったときのみ、前記操作部材の操作終端位置に到達し、該操作終端位置に到達したときは、ロック機構によって前記操作終端位置に拘束され、前記ロック機構によって前記操作終端位置に拘束されている状態以外では、前記付勢部材によって前記操作部材の操作始端位置に向かって付勢されることを特徴とする。
また、クラッチプレートがスプラインプレートと噛み合ったときに、ロック機構によって操作部材が操作終端位置に拘束されることで、クラッチプレートとスプラインプレートとの噛合状態が維持される。
また、操作部材がロック機構によって操作終端位置に拘束されるか否かによって、クラッチの噛合状態を確実に感知することができる。
また、クラッチプレートとスプラインプレートとが噛み合わない限り、操作部材がロックされず、付勢部材によって操作部材が操作始端位置側に付勢されている。したがって、クラッチプレートとスプラインプレートとが噛み合わない状態で、スプラインプレートとの噛合位置に向かってクラッチプレートを移動させる方向に操作力を加えていた操作部材から手を離せば、付勢部材の付勢力によってクラッチプレートとともに操作部材が元の操作始端位置側に戻る。これにより、クラッチの噛合状態を確実に感知することができる。
また、このような操作部材の動作は、操作部材とクラッチプレートとの間に生じる摩擦力によって、操作部材とともにクラッチプレートを回転させることになる。したがって、クラッチプレートとスプラインプレートとが噛み合わない場合に、操作部材の回転にともなってクラッチプレートが回転することで、スプラインプレートと噛み合いやすくすることができる。これにより、クラッチプレートとスプラインプレートとの噛合を確実に行うことが可能となる。
図1は、本発明の実施形態における車輪ユニットを備えた手押し移動体の一例を示す斜視図である。
同図に示すように、電動アシストシルバーカー(手押し移動体)10は、フレーム11と、収納部12と、車輪13と、を備えている。
ここで、以下の説明においては、平面視した状態で、座部フレーム11aに対して背部フレーム11bが設けられた側を後方、その反対側を前方、前後方向に向かって左右両側を側方と称することがある。
この実施形態において、脚部フレーム11cは、上方から下方に向かって、平面視した状態で電動アシストシルバーカー10の四隅に向けて延びている。これにより、車輪13は、電動アシストシルバーカー10の四隅に配されている。ここで、4つの車輪13のうち、フレーム11の前方の幅方向両側に設けられている車輪13fは、脚部フレーム11cを挟んでその両側に二個一対で設けられている。また、フレーム11の後方の幅方向両側に設けられている車輪13rは、脚部フレーム11cの側方に設けられている。
(駆動ユニット)
図2は、車輪ユニットに設けられた駆動ユニットの構成を示す斜視展開図である。
同図に示すように、駆動ユニット20Aは、減速機付モータ(モータ)21と、車輪13rと、クラッチ機構C1と、を備えている。
減速機付モータ21は、ケース210と、ケース210内に設けられたモータ部220と、減速機部230と、駆動軸240を備えている。
同図に示すように、減速機付モータ21は、ケース210内に、モータ部220と、ハイポサイクロイド減速方式により作動し、モータ部220から入力される回転を減速し、減速された回転を出力する減速機部230と、を備える。
ロータ222は、椀形状のロータ本体222aと、ロータ本体222aの外周面に取り付けられたマグネット222bと、を備える。
このような第一外歯歯車234は、入力軸231の回転により、回転部材233と一体に公転しつつ、第一内歯歯車232との噛み合いにより自転する。
この第二内歯歯車235は、第一外歯歯車234と一体に公転しつつ自転し、いわゆる遊星動作する。
第二外歯歯車236の外歯236gは、その内側で入力軸231の回転によって遊星動作する第二内歯歯車235の内歯235gに噛み合う。
さらに、出力部材237は、出力部材237と一体に設けられた第二外歯歯車236の自転運動により所定の比率にて減速(増速)された回転数の回転出力により回転する。
図4は、駆動ユニットを構成するクラッチ機構を示す斜視図である。
同図に示すように、駆動軸240は、出力部材237(図2参照)に固定される円盤状のベース部241と、ベース部241の中心から突出する出力軸部242と、を一体に備えている。
同図に示すように、出力軸部242は、ベース部241側の一定長が断面視円形の支持軸部242aとされ、先端部側の一定長が二方取り加工されて断面視略長円形とされたガイド軸部242bとされている。
図6は、クラッチ機構の構成を示す、駆動軸の軸線方向に沿った断面図である。
図2、図6に示すように、クラッチ機構C1は、ベアリング22と、スプラインプレート23と、ホルダー24Aと、クラッチプレート25と、操作ノブ(操作部材)26と、を備える。
ここで、駆動軸240の出力軸部242は、先端部のガイド軸部242bが、ベアリング22を貫通して、ホイール13wの他方の側に突出するよう設けられる。
図2、図6〜図9に示すように、ホルダー24Aは、スプラインプレート23に対し、ホイール13w側とは反対側に配される。ホルダー24Aは、円環状のベース部24aと、ベース部24aの内周部からスプラインプレート23と反対側に向かって延びる筒状部24bと、を一体に備えている。
凸部24jは、螺旋状部24hの第二端部24n側の端部に、筒状部24bの軸方向に沿ってベース部24a側に突出するよう形成されている。
ロック部24kは、凸部24jに隣接する第二端部24nに、筒状部24bの軸方向に沿ってベース部24aから離間する側に延出するよう形成されている。
スナップリング29と、クラッチプレート25との間には、コイルスプリング(付勢部材)31が圧縮状態で設けられている。このコイルスプリング31により、クラッチプレート25は、ストッパピン30A側、つまりホイール13wから離間する方向に押圧されている。
ここで、図2に示すように、スナップリング29とベアリング22との間、スナップリング29とコイルスプリング31との間には、それぞれ、円環状のシム33が挟み込まれ、クリアランス調整、付勢力調整等がなされている。
同図に示すように、クラッチプレート25を、コイルスプリング31の押圧力に抗して出力軸部242のガイド軸部242bに沿ってホイール13w側に移動させると、スプラインプレート23と噛み合い、クラッチ「続」の状態とされる。
このような、クラッチプレート25の位置を出力軸部242のガイド軸部242bに沿って移動させることで、クラッチプレート25とスプラインプレート23の噛み合いを断続する操作は、操作ノブ26によって行われる。
図2、図12、図13に示すように、操作ノブ26は、円盤状のベース部26aと、ベース部26aのホイール13wから離間した側に突出して設けられた摘まみ部26bと、ベース部26aの外周部からホイール13wに対向する側に延出する筒状部26cと、筒状部26cの先端部に形成され、クラッチプレート25の軸挿通穴25hの外周側に突き当たるプレート押圧部26dと、を一体に備えている。また、操作ノブ26の筒状部26cには、その径方向において対向する位置に、それぞれ外周側に突出するガイドピン(被ガイド部、凸部)32が固定されている。
操作ノブ26をさらに回転させると、クラッチプレート25は、スプラインプレート23の内側で、外歯25gがスプラインプレート23の内歯23gに噛み合ったまま、出力軸部242のガイド軸部242bに沿ってスライドする。
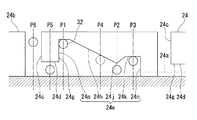
図14は、クラッチ機構において、ガイドピンがガイド溝の凸部を乗り越えるときの、クラッチプレートとスプラインプレートとの位置関係を示す断面図である。
同図に示すように、ガイドピン32がガイド溝24gの凸部24jを乗り越えるとき、クラッチプレート25は、最も車輪13r側に位置する。このとき、クラッチプレート25の一部がスプラインプレート23よりもホイール13w側に突出し、クラッチプレート25の操作ノブ26側の残部が、外歯25gが内歯24gに噛み合った状態を維持できるよう、スプラインプレート23の厚さを設定してもよい。これにより、スプラインプレート23の厚さを最小限に抑えることができる。
このとき、操作ノブ26の操作者は、ガイドピン32がロック部24kに入り込むとともに、ガイドピン32が第二端部24nに周方向から突き当たることを感知することができる。
このようにして、クラッチプレート25をスプラインプレート23にかみ合わせて、クラッチを「続」の状態とすることができる。
すなわち、ガイドピン32が第一端部24mに位置しているときには、摘まみ部26bが「OFF」の表示部24Fに一致し、ガイドピン32が第二端部24nのロック部24kに位置しているときには、摘まみ部26bが「ON」の表示部24Nに一致するようにする。これにより、操作者は、摘まみ部26bの向きと表示部24Nまたは24Fとを視認することで、クラッチを「続」の状態、または「断」の状態にあることを容易に認識することができる。
これにより、操作ノブ26を、ホルダー24Aの筒状部24b内から、ホイール13wから離間する方向に引き出すことができる。これによって、操作ノブ26をホルダー24Aから取り外して、例えばグリスアップ等のメンテナンス等を行うことができる。
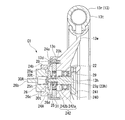
図15は、車輪ユニットの構成を示す斜視図である。図16は、車輪ユニットを図15とは異なる方向から見た斜視図である。
図15、図16に示すように、上記駆動ユニット20Aは、ブラケット100を介してフレーム11に装着することができる。ここで、これら駆動ユニット20Aと、ブラケット100とから、電動アシスト車輪ユニットAが構成されている。
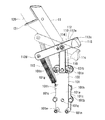
図15〜図19に示すように、ブラケット100は、メインブラケット101と、固定ブラケット102と、ブレーキ部材110と、を備えている。
また、サポート部101aの上下には、それぞれ、幅方向中心に、ボルト締結孔101gが形成されている。
さらに、サポート部101aの上下には、それぞれ、車輪13r側に向かって延び、減速機付モータ21を支持する柱状のモータ支持部101m、101mが形成されている。
ここで、メインブラケット101の脚部フレーム11cの位置決めに用いる貫通孔11hは、例えば、元々ブレーキを取り付けるためのブレーキ取付穴や、車軸穴等を用いることができる。
ブレーキアーム112は、サポートアーム111の上端部111bに、シャフト114を介して鉛直面内で回動自在に設けられている。ブレーキアーム112は、板状で一方向に延びるアームプレート部112aと、アームプレート部112aの一端112cから側方に延出するよう折り曲げ形成されたシュー支持部112bと、を一体に備えている。このブレーキアーム112は、アームプレート部112aの一端112cと他端112dとを結ぶアームプレート部112aの幅方向中心線を中心として線対称に形成されている。
図1に示すように、この操作ワイヤ120は、脚部フレーム11cに固定されたワイヤガイド121を介して上方に向かって延びるよう設けられている。操作ワイヤ120を、フレーム11に設けられた操作レバー123等で操作することで、ブレーキアーム112を鉛直面内で揺動させる。
また、バネ113は、ブレーキアーム112のアームプレート部112aの他端112dと、メインブラケット101のバネ係止部101cのバネ係止孔101hとの間に設けられている。
このようなブレーキ部材110は、操作ワイヤ120の操作によりブレーキアーム112が揺動すると、ブレーキアーム112の一端112cに設けられたシュー115が、車輪13rのタイヤ13tに押し付けられ、制動力を発揮する。
本第1の実施形態によれば、駆動ユニット20A、クラッチ機構C1は、操作ノブ26が、クラッチプレート25がスプラインプレート23と噛み合ったときのみ、操作ノブ26の操作終端位置であるロック部24kに到達する。つまり、クラッチプレート25とスプラインプレート23とが噛み合わない限り、操作ノブ26が操作終端位置に到達しない。これにより、操作ノブ26が操作終端位置であるに到達するか否かにより、クラッチ機構C1の噛合状態を容易に感知することができる。
次に、本発明にかかる車輪ユニット、およびそれを備えた手押し移動体の第2の実施形態について説明する。なお、以下に説明する第2の実施形態においては、上記第1の実施形態と共通する構成については図中に同符号を付してその説明を省略する。
図20は、本発明の第2の実施形態における車輪ユニットを示す斜視図である。図21は、本発明の第2の実施形態における車輪ユニットに設けられた駆動ユニットの構成を示す斜視展開図である。
図20、図21に示すように、駆動ユニット(車輪ユニット)20Bは、減速機付モータ21と、車輪13rと、クラッチ機構C2と、を備えている。
図21に示すように、減速機付モータ21は、ケース210と、ケース210内に設けられたモータ部220と、減速機部230と、駆動軸240を備えている。
出力軸部242は、ベース部241側の一定長が断面視円形の支持軸部242aとされ、先端部側の一定長が二方取り加工されて断面視略長円形とされたガイド軸部242bとされている。
図21、図22に示すように、クラッチ機構C2は、ベアリング22と、スプラインプレート23と、ホルダー24Bと、クラッチプレート25と、操作ノブ(操作部材)36と、を備える。
ここで、駆動軸240の出力軸部242は、先端部のガイド軸部242bが、ベアリング22を貫通して、ホイール13wの他方の側に突出するよう設けられる。
図22、図23に示すように、ホルダー24Bは、スプラインプレート23に対し、ホイール13w側とは反対側に配される。ホルダー24Bは、円環状のベース部24aと、ベース部24aの内周部からスプラインプレート23と反対側に向かって延びる筒状部24tと、を一体に備えている。
スナップリング29と、クラッチプレート25との間には、コイルスプリング31が圧縮状態で設けられている。このコイルスプリング31により、クラッチプレート25は、ストッパピン30B側、つまりホイール13wから離間する方向に押圧されている。
ここで、スナップリング29とベアリング22との間、スナップリング29とコイルスプリング31との間には、それぞれ、円環状のシム33が挟み込まれ、クリアランス調整、付勢力調整等がなされている。
また、クラッチプレート25は、コイルスプリング31の押圧力に抗して出力軸部242のガイド軸部242bに沿ってホイール13w側に移動させると、スプラインプレート23と噛み合い、クラッチ「続」の状態とされる。
図21、図24に示すように、操作ノブ36は、外形略円筒状をなし、一端36a側が閉塞され、他端36b側が開口した有底筒状をなしている。操作ノブ36の一端36a側には、径方向において互いに対向する平面部36c,36cを有した操作部36dが形成されている。操作ノブ36の他端36b側は円筒状で、出力軸部242の先端部が挿入されている。また、操作ノブ36は、他端36bがクラッチプレート25の軸挿通穴25hの外周側に突き当たるよう設けられている。この操作ノブ36の他端36b側には、その内外を貫通するガイド溝(ガイド部、溝)37が形成されている。
各ガイド溝37は、操作ノブ36の軸方向に連続して他端36bに一端が開口する導入溝部37aと、導入溝部37aの他端の端部から周方向に延びるスライド溝部37bと、スライド溝部37bに連通するとともに、スライド溝部37bに対して操作ノブ36の周方向に間隔を空けた位置に形成された案内溝部37cと、を備える。
操作ノブ36は、ストッパピン30Bの端部30sが、案内溝部37cの螺旋状部37hで第一端部37m側に位置している状態では、クラッチプレート25および操作ノブ36が、コイルスプリング31の押圧力によって、出力軸部242のガイド軸部242bに沿ってホイール13wから離間する方向にスライドし、クラッチプレート25がストッパピン30Bに突き当たる。この状態で、クラッチプレート25は、スプラインプレート23に対して噛み合わず、クラッチ「断」の状態とされる。
このようにして、クラッチプレート25をスプラインプレート23にかみ合わせて、クラッチを「続」の状態とすることができる。
本第2の実施形態によれば、クラッチプレート25とスプラインプレート23とが噛み合ったときのみ、ストッパピン30Bが、操作ノブ36のロック部37kに到達する、すなわち、クラッチプレート25とスプラインプレート23とが噛み合わない限り、ストッパピン30Bが操作ノブ36のロック部37kに到達しない。これにより、ストッパピン30Bが操作ノブ36のロック部37kに係合するか否かにより、クラッチ機構C2の噛合状態を容易に感知することができる。
さらに、操作ノブ36の回転がロック部37kによって拘束されることを感知することによって、クラッチ機構C2の噛合状態を確実に感知することができる。
このような操作ノブ36の動作は、操作ノブ36とクラッチプレート25との間に生じる摩擦力によって、操作ノブ36とともにクラッチプレート25を回転させることになる。したがって、クラッチプレート25とスプラインプレート23とが噛み合わない場合に、操作ノブ36の回転にともなってクラッチプレート25を回転させて、スプラインプレート23と噛み合いやすくすることができる。これにより、クラッチプレート25とスプラインプレート23との噛合を確実に行うことが可能となる。
なお、本発明は上述の各実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲において、上述の実施形態に種々の変更を加えたものを含む。
これ以外にも、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更したりすることが可能である。
11…フレーム
11c…脚部フレーム
11h…貫通孔
13r…車輪
20A、20B…駆動ユニット(車輪ユニット)
21…減速機付モータ(モータ)
23…スプラインプレート
24A、24B…ホルダー
24g…ガイド溝(ガイド部、溝)
24k…ロック部(操作終端位置、ロック機構)
24m…第一端部(操作始端位置)
24n…第二端部
24N…表示部(終端位置表示部)
25…クラッチプレート
26…操作ノブ(操作部材)
30A…ストッパピン(ストッパ部材)
30B…ストッパピン(ストッパ部材、被ガイド部、凸部)
31…コイルスプリング(付勢部材)
32…ガイドピン(被ガイド部、凸部)
36…操作ノブ(操作部材)
37k…ロック部(操作終端位置、ロック機構)
37m…第一端部(操作始端位置)
37…ガイド溝(ガイド部、溝)
100…ブラケット
240…駆動軸
A、B…電動アシスト車輪ユニット(車輪ユニット)
C1、C2…クラッチ機構
Claims (7)
- 駆動軸を回転させるモータと、
前記駆動軸に対して相対回転可能に支持された車輪と、
前記車輪に前記駆動軸の回転力を伝達するアシスト状態と、前記車輪への前記駆動軸の回転力の伝達を遮断するフリー状態とに切替可能なクラッチ機構と、を備え、
前記クラッチ機構は、
前記駆動軸と一体に回転するとともに、前記駆動軸の軸方向に移動可能に設けられたクラッチプレートと、
前記車輪と一体に設けられ、前記クラッチプレートに噛合可能なスプラインプレートと、
前記クラッチプレートを前記駆動軸の軸方向に沿って前記スプラインプレートとの噛合位置に向かって移動させる操作部材と、
前記クラッチプレートを前記操作部材に向かって付勢する付勢部材と、を備え、
前記操作部材は、前記クラッチプレートが前記スプラインプレートと噛み合ったときのみ、前記操作部材の操作終端位置に到達し、該操作終端位置に到達したときは、ロック機構によって前記操作終端位置に拘束され、前記ロック機構によって前記操作終端位置に拘束されている状態以外では、前記付勢部材によって前記操作部材の操作始端位置に向かって付勢されることを特徴とする車輪ユニット。 - 前記操作部材は、前記クラッチプレートを、前記スプラインプレート側とは反対側から、前記スプラインプレート側に向かって直接押圧し、
前記付勢部材は、前記クラッチプレートを、前記スプラインプレート側から前記操作部材側に向かって付勢することを特徴とする請求項1に記載の車輪ユニット。 - 前記車輪と一体に設けられ、前記クラッチプレートを操作するときの前記操作部材の移動軌跡を案内するガイド部と、
前記操作部材に形成され、前記ガイド部に案内される被ガイド部と、を備えることを特徴とする請求項1または請求項2に記載の車輪ユニット。 - 前記ガイド部は、前記駆動軸の軸方向回りに螺旋状に形成された溝であり、
前記被ガイド部は、前記溝に沿って移動可能な凸部であることを特徴とする請求項3に記載の車輪ユニット。 - 前記駆動軸に、前記クラッチプレートの前記操作部材側への移動量を拘束するストッパ部材が設けられていることを特徴とする請求項1から請求項4の何れか1項に記載の車輪ユニット。
- 前記操作部材が、前記操作終端位置にあることを表示する終端位置表示部が形成されていることを特徴とする請求項1から請求項5の何れか1項に記載の車輪ユニット。
- 請求項1から請求項6の何れか1項に記載の車輪ユニットを備えることを特徴とする手押し移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015142135A JP6586312B2 (ja) | 2015-07-16 | 2015-07-16 | 車輪ユニット、およびそれを備えた手押し移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015142135A JP6586312B2 (ja) | 2015-07-16 | 2015-07-16 | 車輪ユニット、およびそれを備えた手押し移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017025948A JP2017025948A (ja) | 2017-02-02 |
| JP6586312B2 true JP6586312B2 (ja) | 2019-10-02 |
Family
ID=57949460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015142135A Active JP6586312B2 (ja) | 2015-07-16 | 2015-07-16 | 車輪ユニット、およびそれを備えた手押し移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6586312B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110725871A (zh) * | 2017-09-01 | 2020-01-24 | 沈健龙 | 一种齿牙传动的离合器 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6283733U (ja) * | 1985-11-16 | 1987-05-28 | ||
| JPS63172727U (ja) * | 1987-04-30 | 1988-11-09 | ||
| JP3139581B2 (ja) * | 1992-09-18 | 2001-03-05 | ヤマハ発動機株式会社 | 車椅子用自動走行装置 |
-
2015
- 2015-07-16 JP JP2015142135A patent/JP6586312B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110725871A (zh) * | 2017-09-01 | 2020-01-24 | 沈健龙 | 一种齿牙传动的离合器 |
| CN110725871B (zh) * | 2017-09-01 | 2020-10-23 | 玉环县兴发动力有限公司 | 一种齿牙传动的离合器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017025948A (ja) | 2017-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5969568B2 (ja) | 自転車用アシストユニット | |
| TWI439392B (zh) | Bicycle with built-in variable speed wheels | |
| KR101576164B1 (ko) | 일체화된 전동휠 장치 | |
| EP3527857B1 (en) | In-wheel motor drive device | |
| TWI461327B (zh) | Bicycle hub with motor | |
| CN100564922C (zh) | 载荷扭矩闭锁装置 | |
| JP2008137630A (ja) | キャスタ制動装置 | |
| JP2017114169A (ja) | シフト装置 | |
| JP4648160B2 (ja) | 電動ステアリングロック装置 | |
| US6516931B2 (en) | Freewheel clutch | |
| JP4856556B2 (ja) | 電動ステアリングロック装置 | |
| JP6675110B2 (ja) | 駆動ユニットおよび電動アシスト自転車 | |
| US10807677B2 (en) | Directional transmission mechanism, directional sprocket apparatus and pedal device | |
| JP4958730B2 (ja) | 幼児用三輪車の駆動機構および幼児用三輪車 | |
| TW200428748A (en) | Rotating electric machine and electric vehicle | |
| JP5332903B2 (ja) | パワーシートの減速装置 | |
| JP6586312B2 (ja) | 車輪ユニット、およびそれを備えた手押し移動体 | |
| JP2012025328A (ja) | 電動補助自転車 | |
| JP2012096775A (ja) | 電動補助自転車用のハブモータ装置 | |
| JP2017024459A (ja) | 電動アシスト車輪ユニット、およびそれを備えた手押し移動体 | |
| JP6531023B2 (ja) | 電動アシスト車輪ユニット、および手押し移動体 | |
| JP2011126415A (ja) | 電動補助自転車用リアハブ内装変速装置 | |
| JP2018158620A (ja) | パークロック機構、およびこれを具備するインホイールモータ駆動装置 | |
| JP6474328B2 (ja) | 車輪ユニット、およびそれを備えた手押し移動体 | |
| JP7035767B2 (ja) | モータユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181023 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181030 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190319 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190517 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6586312 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |