JP6573389B2 - 表示制御装置およびその制御方法 - Google Patents
表示制御装置およびその制御方法 Download PDFInfo
- Publication number
- JP6573389B2 JP6573389B2 JP2015197907A JP2015197907A JP6573389B2 JP 6573389 B2 JP6573389 B2 JP 6573389B2 JP 2015197907 A JP2015197907 A JP 2015197907A JP 2015197907 A JP2015197907 A JP 2015197907A JP 6573389 B2 JP6573389 B2 JP 6573389B2
- Authority
- JP
- Japan
- Prior art keywords
- posture
- change
- display
- display control
- display device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1694—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being a single or a set of motion sensors for pointer control or gesture input obtained by sensing movements of the portable computer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0412—Digitisers structurally integrated in a display
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2200/00—Indexing scheme relating to G06F1/04 - G06F1/32
- G06F2200/16—Indexing scheme relating to G06F1/16 - G06F1/18
- G06F2200/161—Indexing scheme relating to constructional details of the monitor
- G06F2200/1614—Image rotation following screen orientation, e.g. switching from landscape to portrait mode
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2200/00—Indexing scheme relating to G06F1/04 - G06F1/32
- G06F2200/16—Indexing scheme relating to G06F1/16 - G06F1/18
- G06F2200/163—Indexing scheme relating to constructional details of the computer
- G06F2200/1637—Sensing arrangement for detection of housing movement or orientation, e.g. for controlling scrolling or cursor movement on the display of an handheld computer
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Controls And Circuits For Display Device (AREA)
- User Interface Of Digital Computer (AREA)
Description
特許文献2には、表示部と同じ側に設けられたカメラで使用者の顔画像を撮影して、使用者の顔の向きに合わせ、画像の向きを回転させて表示部に表示する携帯端末装置が開示されている。
特許文献3には、筐体の背面に配置された接触センサにより検知された筐体を保持する手の接触位置と、筐体の姿勢とに基づいて、画像の向きを回転させて表示部に表示する携帯端末が開示されている。
また、特許文献3に開示された携帯端末では、特定のパターンで筐体を保持している場合でしか作用せず、様々な筐体の保持態様には対応することができない。
このように従来の技術では、使用者の所望する表示向きに画像に表示させることが容易ではないという問題があった。
(第1の実施形態)
本実施形態では、表示制御装置を表示装置に適用する場合について説明する。ここで、表示装置は使用者が携帯可能な装置であって、例えばスマートフォン等の携帯電話端末である。
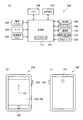
図1(a)は、表示装置100の概略構成を示す図である。
表示装置100は、制御部101、電源スイッチ102、センサ103、画像表示ボタン104、操作スイッチ105、メモリ106、記録媒体107、表示部108、タッチパネル109、撮像部110、移動検知装置111、タイマカウンタ112等を有する。
図1(b)に示すように、表示装置100は、中央に長方形の表示部108が位置し、表示部108の表示面のタッチを検出できるようにタッチパネル109が配置される。また、表示装置100は、右側に電源スイッチ102が配置され、表示部108の下側に操作スイッチ105が配置される。
なお、表示装置100自体は外形が長辺と短辺からなる縦に長い長方形である。また、表示部108も同様に外形が長辺と短辺からなる長方形である。典型的には、図1(b)に示す表示装置100の姿勢を縦姿勢といい、図1(b)に示す状態から90°回転させた姿勢を横姿勢という。本実施形態では、表示装置100が縦姿勢の場合に正位置であるものとする。
センサ103は、X軸、Y軸の2つを出力する。ここでは、X軸が表示面と平行であって、かつ表示装置100の外形の短辺と平行な軸である。また、Y軸は表示面と平行であって、かつ表示装置100の外形の長辺と平行な軸である。
図2(b)は、表示装置100をやや斜めにしたときのセンサ103の出力を示す図である。図2(b)に示すように、表示装置100が斜めの場合にはX軸の出力値とY軸の出力値が略同一の値である。制御部101はX軸とY軸の出力値が同一に出力されたことにより、表示装置100の角度が135°であると判定する。
図2(c)は、表示装置100を横姿勢にしたとき、具体的には電源スイッチ102を上側にしたときのセンサ103の出力を示す図である。表示装置100が図2(c)に示すような横姿勢の場合にはX軸の出力値が略「−1」である。一方、Y軸の出力値は略「0」である。制御部101はX軸およびY軸の出力値から表示装置100の角度が180°であり、表示装置100が横姿勢であると判定する。なお、説明を容易にするために、この姿勢を一方向横姿勢という。
図2(d)は、表示装置100を横姿勢にしたとき、具体的には電源スイッチ102を下側にしたときのセンサ103の出力を示す図である。表示装置100が図2(d)に示すような横姿勢の場合にはX軸の出力値が略「1」である。一方、Y軸の出力値は略「0」である。制御部101はX軸およびY軸の出力値から表示装置100の角度が0°であり、表示装置100が横姿勢であると判定する。なお、説明を容易にするために、この姿勢を他方向横姿勢という。
S302では、制御部101はタイマカウンタ112から現在の時刻Timeを取得して、時刻の変数t(n)に代入して、メモリ106に記憶する。
S303では、制御部101はセンサ103の出力に基づいて表示装置100の角度を取得する。具体的には、制御部101はセンサ103からのX軸およびY軸の出力値に基づいて表示装置100の角度Angleを算出することで、角度Angleを取得する。制御部101は取得した角度Angleを角度の変数a(n)に代入して、メモリ106に記憶する。
具体的には、cos(a(n))の値が−1/√2よりも小さい場合にはS305に進み、制御部101は表示装置100の姿勢が一方向横姿勢であると判定する(典型的には図2(c)に示す姿勢)。したがって、制御部101は表示装置100の一方向横姿勢に基づいて画像等のコンテンツ(以下、単に画像という)を表示部108に表示する。すなわち、図2(a)で表示していた画像を表示装置100に対して90°右回転させて表示部108に表示する。この処理は、表示制御手段による処理の一例に対応する。
また、cos(a(n))の値が−1/√2以上であって、かつ1/√2以下の場合にはS306に進み、制御部101は表示装置100が縦姿勢であると判定する(典型的には図2(a)に示す姿勢)。したがって、制御部101は表示装置100が縦姿勢であることに基づいて画像を表示部108に表示する。
また、cos(a(n))の値が1/√2よりも大きい場合にはS307に進み、制御部101は表示装置100の姿勢が他方向横姿勢であると判定する(典型的には図2(d)に示す姿勢)。したがって、制御部101は表示装置100の他方向横姿勢に基づいて画像を表示部108に表示する。すなわち、図2(a)で表示していた画像を表示装置100に対して90°左回転させて表示部108に表示する。
すなわち、本実施形態では、角度の変数a(n)が135°よりも大きい場合には一方向横姿勢とし、45°以上かつ135°以下の場合には縦姿勢とし、45°よりも小さい場合には他方向横姿勢として判定される。
S309では、制御部101は次のステップの演算を始めるためにカウンタnに「1」を加算する。
S310では、制御部101はタイマカウンタ112から現在の時刻Timeを取得して、時刻の変数t(n)に代入して、メモリ106に記憶する。
S312では、制御部101は表示装置100の姿勢が所定角度よりも変化したか否かを判定する。具体的には、制御部101は1カウント前の角度の変数a(n−1)と、S311で記憶した現在の角度の変数a(n)とを比較し、表示装置100の姿勢の角度差が閾値Athよりも大きいか否かを判定する。ここでは、S311で記憶した現在の角度の変数a(n)から1カウント前の角度の変数a(n−1)を減算した値の絶対値を算出している。角度差が閾値よりも大きい場合にはS313に進む。
なお、S312の処理は、S308において時間IntervalTが経過した場合に開始されるため、S312では、実質的に時間IntervalT当たりの変化量、すなわち姿勢変化の速度を判定していることになる。換言すると、S312では、制御部101が表示装置100の姿勢変化の速度が所定の速度よりも速いか否かを判定している。
なお、S312において角度差が大きくないと判定される場合とは時間IntarevalTの間で、表示装置100の姿勢変化が小さい場合であり、この場合にはS313からS316までの処理をすることなくS317に進む。
S318では、制御部101は表示部108をオフにして、表示制御を終了する。
一方、表示装置100の姿勢変化の速度が所定の速度よりも速くない場合、すなわち表示装置100の姿勢をゆっくり変化させた場合には、制御部101は表示装置100の姿勢変化が使用者の体に連動した姿勢変化であると推定する。具体的には、使用者が表示装置100を保持しながら寝転んだり、起き上がったりした場合であると推定する。この場合には、制御部101は表示装置100に対して画像の表示向きを回転させないことで、使用者の所望する表示向きに画像を表示することができる。
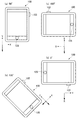
図4は、使用者がその場で表示装置100を回転させて閲覧するときの状態を示す図である。
図4(a)は、使用者が表示装置100を縦姿勢で保持している状態を示す図であり、図2(a)に示す表示装置100と同様の姿勢である。すなわち、表示装置100の角度は90°である。
一方、図4(b)は、図4(a)の状態から使用者が表示装置100を素早く回転させて、他方向横姿勢で保持している状態を示す図であり、図2(d)に示す表示装置100の姿勢と同様の姿勢である。すなわち、表示装置100の角度は0°である。
図4(a)の状態のときをt0とし、時間IntervalTを0.2秒とすると、表示装置100の角度は、0.2秒後のt1で略70°、0.4秒後のt2で略30°、0.6秒後のt3で0°に変化している。
図5(a)では、横姿勢で撮影された画像を、縦姿勢の表示装置100の表示部108に表示している図である。ここで、使用者は画像を横姿勢で閲覧したいために、表示装置100を回転させる。
図5(b)は、図5(a)の状態から表示装置100の右回転を開始した0.2秒後の表示部108の表示例を示す図である。ここでは、表示装置100の角度が70°であり、図5(a)との角度差が20°(すなわち90°−70°)である。この場合、S312において制御部101は角度差20°が閾値Ath=30°よりも大きくないと判定し、S317に進む。したがって、制御部101は姿勢に応じた表示制御を行わないために、図5(b)に示すように表示装置100に対する画像の表示向きは図5(a)と同一である。
図6(a)は、使用者が表示装置100を縦姿勢で保持している場合を示している。図6(b)は、使用者が寝転び始めた状態を示している。図6(c)は、使用者が仰向けで寝転んだ状態を示している。図6(d)は、使用者がやや右側に寝返りした状態を示している。図6(e)は、使用者が完全に右側に寝返り(横臥)した状態を示している。なお、図6(c)〜図6(e)では、使用者の視線の相対値からみると画像の表示向きは、図6(b)と同一の表示向きのままであることが好ましい状態である。
図6(a)の状態のときをt0とし、時間IntervalTを0.2秒とすると、表示装置100の角度は、0.4秒後のt2および0.8秒後のt4では0°で、1.4秒後のt7では60°、2.0秒後のt10では15°に変化している。なお、図6(b)の状態のときをt2、図6(c)の状態のときをt4、図6(d)の状態のときをt7、図6(e)の状態のときをt10とする。
図7(a)では、縦姿勢で撮影された画像を、縦姿勢の表示装置100の表示部108に表示している図である。ここから、使用者は仰向けから横臥した状態で閲覧したいために、表示部108を保持したまま寝返りする。なお、図6(a)から図6(c)の状態までは、使用者が寝転んでも、表示装置100の角度は変わらないため、表示部108に表示される画像は、図7(a)の表示向きのままである。
図7(d)は、図7(c)の状態から0.4秒後、すなわちt10のときの表示部108の表示例を示す図である。ここでは、表示装置100の角度が15°であるが、時間IntervalTである0.2秒間で大きく変化することがないので、図7(d)に示すように表示装置100に対する画像の表示向きは図7(c)と同一である。
次に、第2の実施形態の表示制御について図8のフローチャートを参照して説明する。本実施形態では、移動検知装置111により通知される位置情報を用いて表示部108に表示する画像を制御する場合について説明する。図8に示すフローチャートは、制御部101が記録媒体107に記録されたプログラムをメモリ106に展開して実行することで実現される。なお、図8のフローチャートは、第1の実施形態で説明した図3のフローチャートにS801〜S804の処理を追加したものである。したがって、図8のフローチャートのうち、図3のフローチャートと同一の処理は、同一のステップ番号を付して、その説明を省略する。
S803では、制御部101は表示装置100の姿勢が所定角度よりも変化したか否かを判定する。具体的には、制御部101は現在のカウンタよりも3つ前の角度の変数a(n−3)と、現在の角度の変数a(n)とを比較し、表示装置100の角度差が閾値Athよりも大きいか否かを判定する。ここでは、現在の角度の変数a(n)から3カウント前の角度の変数a(n−3)を減算した値の絶対値を算出している。角度差が閾値よりも大きくない場合にはS317に進み、角度差が閾値よりも大きい場合にはS804に進む。
ここで、移動量が閾値よりも大きくない場合とは使用者が表示装置100を、その場で素早く回転させる等して、移動を伴わず回転させていると推定される。一方、移動量が閾値よりも大きい場合とは使用者が表示装置100の移動を伴いながら素早く回転させていると推定される。
図9(a)は、図4(a)〜図4(b)のように、使用者がその場で表示装置100を回転させて閲覧するときの表示装置100の位置を示している。図9(a)に示すように、図4(a)の状態のときをt0とし、0.2秒後をt1、0.4秒後をt2とし、図4(b)の状態のときをt3としている。
図9(a)に示すように、t0〜t3の何れの時間でも表示装置100は10cmほど移動しただけで、ほとんど移動していない。したがって、S803からS804に進むと、制御部101は表示装置100の位置が所定量以上で変化していないと判定し、S313に進む。したがって、制御部101は表示装置100に対して画像を回転させる表示制御を行う。
なお、t10以降では、表示装置100の移動量は閾値Pthの10cmよりも小さくなるものの、表示装置100の姿勢変化がなくなるために、S803において角度差が閾値Athよりも小さいと判定され、S317に進み、S804には進まない。したがって、制御部101は表示装置100に対して画像を回転させる表示制御を行わない。
このように、表示装置100の姿勢を検出することに加え、表示装置100の位置の変化を検出することで、表示装置100の状態を精度よく推定でき、使用者の所望する表示向きに画像を表示させることができる。
次に、第3の実施形態の表示制御について図10のフローチャートを参照して説明する。本実施形態では、第1の実施形態で説明した図3のフローチャートに表示制御におけるヒステリシスの処理を追加したものである。図10に示すフローチャートは、制御部101が記録媒体107に記録されたプログラムをメモリ106に展開して実行することで実現される。なお、図10のフローチャートは、第1の実施形態で説明した図3のフローチャートのS313〜S316の処理を、S1001〜S1009の処理に変えたものである。したがって、図10のフローチャートのうち、図3のフローチャートと同一の処理は、同一のステップ番号を付して、その説明を省略する。
図11(a)および図11(b)は、図5(a)および図5(b)と同様に画像が表示される。
図11(c)は、図11(b)の状態から表示装置100を更に右回転したときの表示部108の表示例を示す図である。図5(c)では画像を表示装置100に対して90°左回転させて表示部108に表示したが、図11(c)では表示装置100に対する画像の表示向きは図11(b)と同一である。
図11(d)は、図11(c)の状態から表示装置100を更に右回転したときの表示部108の表示例を示す図である。制御部101は表示装置100の角度が0°近くで表示装置100が横姿勢であると判定し、図11(c)で表示していた画像を表示装置100に対して90°左回転させて表示部108に表示する。
本実施形態では、撮像部110を用いることで、表示制御装置を撮像装置として適用する場合について説明する。ここで、撮像装置は、例えばデジタルカメラである。撮像装置は、決定された姿勢情報に基づいて撮影した画像に姿勢情報を付与したり、画像を回転処理して記録したりすることができる。本実施形態は、図3のフローチャートおよび図8のフローチャートの処理のうち、S305からS307までの処理およびS314からS316までの処理を以下のように変更したものである。なお、S305からS307までの処理およびS314からS316までの処理では、表示装置100の姿勢に応じて表示部108の表示を制御する必要はなく、主に撮像装置の姿勢を検出する制御を行う。
なお、S314からS316までの処理も、S305からS307までの処理と同様である。これらの処理は、制御手段による処理の一例に対応する。
上述した各実施形態では、静止画の場合について説明したが、動画であっても同様に処理することができる。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (7)
- 表示部の表示を制御する表示制御装置であって、
前記表示制御装置の姿勢を検出する姿勢検出手段と、
前記表示制御装置の位置を検出する位置検出手段と、
前記姿勢検出手段により前記表示制御装置が第1の姿勢から第2の姿勢に姿勢変化したことが検出されたときに、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記姿勢変化の間に前記位置検出手段により所定量よりも大きい位置の変化が検出されない場合には、姿勢変化後に前記第2の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記位置検出手段により前記表示制御装置の位置の変化が継続して検出されておらず、かつ、前記姿勢変化の間に前記位置検出手段により所定量よりも大きい位置の変化が検出された場合には、姿勢変化後にも前記第1の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記位置検出手段により前記表示制御装置の位置の変化が継続して検出された場合には、前記姿勢変化の間に前記位置検出手段により前記所定量よりも大きい位置の変化が検出されたか否かにかかわらず、姿勢変化後に前記第2の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が前記所定の速度よりも遅い場合には前記姿勢変化後にも前記第1の姿勢に基づいた表示制御を行う表示制御手段と、
を有し、
前記第1の姿勢は縦姿勢であり、前記第2の姿勢は横姿勢であって、
前記第1の姿勢に基づいた表示制御と前記第2の姿勢に基づいた表示制御では、前記表示部に対する画像を表示する表示向きが90°異なることを特徴とする表示制御装置。 - 前記第1の姿勢から前記第2の姿勢に姿勢変化する場合と前記第2の姿勢から前記第1の姿勢に姿勢変化する場合では、前記表示部に対して画像を異なる表示向きに変更するときの角度が異なることを特徴とする請求項1に記載の表示制御装置。
- 前記姿勢検出手段は、加速度センサ、ジャイロセンサおよび地磁気センサからの出力の少なくとも何れか一つに基づいて前記表示制御装置の姿勢を検出することを特徴とする請求項1または2に記載の表示制御装置。
- 前記位置検出手段は、GPSまたはWi−Fiによる電波、加速度センサおよびジャイロセンサからの出力の少なくとも何れか一つに基づいて前記表示制御装置の位置を検出することを特徴とする請求項1ないし3の何れか1項に記載の表示制御装置。
- 表示部の表示を制御する表示制御装置の制御方法であって、
前記表示制御装置の姿勢を検出する姿勢検出ステップと、
前記表示制御装置の位置を検出する位置検出ステップと、
前記姿勢検出ステップにより前記表示制御装置が第1の姿勢から第2の姿勢に姿勢変化したことが検出されたときに、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記姿勢変化の間に前記位置検出ステップにより所定量よりも大きい位置の変化が検出されない場合には、姿勢変化後に前記第2の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記位置検出ステップにより前記表示制御装置の位置の変化が継続して検出されておらず、かつ、前記姿勢変化の間に前記位置検出ステップにより所定量よりも大きい位置の変化が検出された場合には、姿勢変化後にも前記第1の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が所定の速度よりも速く、かつ、前記位置検出ステップにより前記表示制御装置の位置の変化が継続して検出された場合には、前記姿勢変化の間に前記位置検出ステップにより前記所定量よりも大きい位置の変化が検出されたか否かにかかわらず、姿勢変化後に前記第2の姿勢に基づいた表示制御を行い、
前記姿勢変化の速度が前記所定の速度よりも遅い場合には前記姿勢変化後にも前記第1の姿勢に基づいた表示制御を行う表示制御ステップと、
を有し、
前記第1の姿勢は縦姿勢であり、前記第2の姿勢は横姿勢であって、
前記第1の姿勢に基づいた表示制御と前記第2の姿勢に基づいた表示制御では、前記表示部に対する画像を表示する表示向きが90°異なることを特徴とする制御方法。 - コンピュータを、請求項1ないし4の何れか1項に記載された各手段として機能させるためのプログラム。
- コンピュータを、請求項1ないし4の何れか1項に記載された各手段として機能させるためのプログラムを記録したコンピュータが読み取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015197907A JP6573389B2 (ja) | 2015-10-05 | 2015-10-05 | 表示制御装置およびその制御方法 |
| US15/284,274 US9874947B2 (en) | 2015-10-05 | 2016-10-03 | Display control apparatus and control method therefor, and imaging apparatus and control method therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015197907A JP6573389B2 (ja) | 2015-10-05 | 2015-10-05 | 表示制御装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017072909A JP2017072909A (ja) | 2017-04-13 |
| JP6573389B2 true JP6573389B2 (ja) | 2019-09-11 |
Family
ID=58447899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015197907A Expired - Fee Related JP6573389B2 (ja) | 2015-10-05 | 2015-10-05 | 表示制御装置およびその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9874947B2 (ja) |
| JP (1) | JP6573389B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112199061B (zh) * | 2020-09-30 | 2023-06-27 | 联想(北京)有限公司 | 一种显示方法和设备 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000312329A (ja) | 1999-02-26 | 2000-11-07 | Canon Inc | 画像処理装置、画像処理システム、画像処理制御方法、及び記憶媒体 |
| JP2008177819A (ja) | 2007-01-18 | 2008-07-31 | Mitsubishi Electric Corp | 携帯端末装置 |
| KR20130051697A (ko) * | 2011-11-10 | 2013-05-21 | 삼성전자주식회사 | 단말의 움직임에 따라 이미지 표시를 제어하기 위한 장치 및 방법 |
| JP5978610B2 (ja) * | 2011-12-09 | 2016-08-24 | ソニー株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP2013150129A (ja) | 2012-01-19 | 2013-08-01 | Kyocera Corp | 携帯端末 |
| KR101404380B1 (ko) * | 2012-09-24 | 2014-06-09 | 주식회사 팬택 | 모바일 디바이스 및 모바일 디바이스의 화면 방향 전환 방법 |
-
2015
- 2015-10-05 JP JP2015197907A patent/JP6573389B2/ja not_active Expired - Fee Related
-
2016
- 2016-10-03 US US15/284,274 patent/US9874947B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9874947B2 (en) | 2018-01-23 |
| US20170097691A1 (en) | 2017-04-06 |
| JP2017072909A (ja) | 2017-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108279832B (zh) | 图像采集方法和电子装置 | |
| CN111917997B (zh) | 利用多个相机控制图像拍摄的可折叠电子装置和方法 | |
| JP6825366B2 (ja) | 時計、時計表示制御方法及びプログラム | |
| CN108710525B (zh) | 虚拟场景中的地图展示方法、装置、设备及存储介质 | |
| US9674444B2 (en) | Apparatus and method for positioning image area using image sensor location | |
| JP6109413B2 (ja) | 画像表示方法、画像表示装置、端末、プログラム及び記録媒体 | |
| JP5978610B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| US10552946B2 (en) | Display control apparatus and method for controlling the same based on orientation | |
| EP3154255A1 (en) | Imaging device and video generation method by imaging device | |
| JP6598747B2 (ja) | 電子機器、制御装置、制御プログラム及び電子機器の動作方法 | |
| CN107346332A (zh) | 一种图像处理方法以及移动终端 | |
| JP6843564B2 (ja) | 表示制御装置、その制御方法およびプログラム | |
| JP6573389B2 (ja) | 表示制御装置およびその制御方法 | |
| US9489927B2 (en) | Information processing device for controlling direction of display image and control method thereof | |
| JP2020017215A (ja) | 電子機器、制御プログラム及び表示制御方法 | |
| TWI498804B (zh) | 電子裝置和影像擷取方法 | |
| CN107767712B (zh) | 调整匹配度的方法、装置、存储介质及电子设备 | |
| JP6756103B2 (ja) | 電子機器、表示システム、表示装置、撮像装置、表示制御方法及びプログラム | |
| JP2019191988A (ja) | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 | |
| US10531005B2 (en) | Display control apparatus, control method, and program | |
| JP7034856B2 (ja) | 電子機器、制御プログラム及び表示制御方法 | |
| JP6244666B2 (ja) | 表示装置及びプログラム | |
| JP6932907B2 (ja) | 情報処理装置、情報処理システム、情報処理方法及びプログラム | |
| JP7210153B2 (ja) | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 | |
| CN109219789A (zh) | 虚拟现实的显示方法、装置及终端 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190809 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6573389 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |