JP6571792B2 - ロボティックベッド - Google Patents
ロボティックベッド Download PDFInfo
- Publication number
- JP6571792B2 JP6571792B2 JP2017554667A JP2017554667A JP6571792B2 JP 6571792 B2 JP6571792 B2 JP 6571792B2 JP 2017554667 A JP2017554667 A JP 2017554667A JP 2017554667 A JP2017554667 A JP 2017554667A JP 6571792 B2 JP6571792 B2 JP 6571792B2
- Authority
- JP
- Japan
- Prior art keywords
- robot arm
- movable element
- robotic bed
- robotic
- bed according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 claims description 74
- 238000011282 treatment Methods 0.000 claims description 67
- 230000007246 mechanism Effects 0.000 claims description 46
- 238000002357 laparoscopic surgery Methods 0.000 claims description 3
- 238000007689 inspection Methods 0.000 description 66
- 230000006870 function Effects 0.000 description 36
- 238000001356 surgical procedure Methods 0.000 description 31
- 238000002360 preparation method Methods 0.000 description 22
- 239000000203 mixture Substances 0.000 description 20
- 230000000694 effects Effects 0.000 description 9
- 208000003174 Brain Neoplasms Diseases 0.000 description 6
- 230000008901 benefit Effects 0.000 description 6
- 238000012360 testing method Methods 0.000 description 6
- 230000036760 body temperature Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 210000004556 brain Anatomy 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 230000032258 transport Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 230000004083 survival effect Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 238000002583 angiography Methods 0.000 description 2
- 230000000740 bleeding effect Effects 0.000 description 2
- 230000037396 body weight Effects 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 235000012489 doughnuts Nutrition 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000000414 obstructive effect Effects 0.000 description 2
- 230000002980 postoperative effect Effects 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 230000002490 cerebral effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 238000001802 infusion Methods 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 239000000941 radioactive substance Substances 0.000 description 1
- 238000001959 radiotherapy Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images



































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/02—Adjustable operating tables; Controls therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room
- A61B5/004—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room adapted for image acquisition of a particular organ or body part
- A61B5/0042—Features or image-related aspects of imaging apparatus, e.g. for MRI, optical tomography or impedance tomography apparatus; Arrangements of imaging apparatus in a room adapted for image acquisition of a particular organ or body part for the brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0407—Supports, e.g. tables or beds, for the body or parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0487—Motor-assisted positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/485—Diagnostic techniques involving fluorescence X-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/02—Adjustable operating tables; Controls therefor
- A61G13/06—Adjustable operating tables; Controls therefor raising or lowering of the whole table surface
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/104—Adaptations for table mobility, e.g. arrangement of wheels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N5/00—Radiation therapy
- A61N5/10—X-ray therapy; Gamma-ray therapy; Particle-irradiation therapy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2210/00—Devices for specific treatment or diagnosis
- A61G2210/50—Devices for specific treatment or diagnosis for radiography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Neurology (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
Description
(第1の構成例)
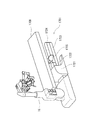
図1に、本発明の第1の構成例に係るロボティックベッドの側面図を示す。ロボティックベッドに用いられるロボットアーム101は、多自由度(3自由度以上)を有し、その先端で載置対象物が載置されるテーブル108を支持する。テーブル108およびロボットアーム101は、ロボティックベッドを構成する。
図7に、本発明の第2の構成例に係るロボティックベッドの側面図を示す。ロボティックベッドに用いられるロボットアーム701はいわゆる垂直多関節のロボットアームで、多自由度(3自由度以上)を有し、その先端で載置対象物が載置されるテーブル708を支持する。テーブル708およびロボットアーム701は、ロボティックベッドを構成する。
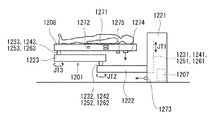
本発明の第3の構成例に係るロボティックベッドの外観図を図9に、側面図を図10に示す。ロボティックベッドに用いられるロボットアーム1001は、多自由度(3自由度以上)を有し、その先端で載置対象物が載置されるテーブル1008を支持する。テーブル1008およびロボットアーム1001は、ロボティックベッドを構成する。
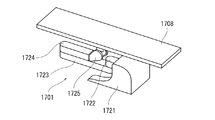
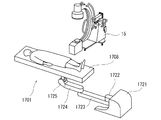
本発明の第4の構成例に係るロボティックベッドの斜視図を図16に、側面図を図17に示す。ロボティックベッドに用いられるロボットアーム1701は、多自由度(3自由度以上)を有し、その先端で載置対象物が載置されるテーブル1708を支持する。テーブル1708およびロボットアーム1701は、ロボティックベッドを構成する。
本構成例に係るロボティックベッドは、第1〜第4の構成例のロボティックベッドにおけるテーブルにおいて、スライド機構を備えていることを特徴としている。
ロボティックベッドに用いられるロボットアーム2701は、多自由度(3自由度以上)を有し、その先端で載置対象物が載置されるテーブル2708を支持する。テーブル2708およびロボットアーム2701は、ロボティックベッドを構成する。
以下には、第1〜第5の構成例全てに適用可能な追加の特徴を記す。
各構成例におけるテーブルへの載置対象が患者である場合、その患者が生命維持装置や点滴、その他治療に必要な装置を装着していることがある。
水平回転ジョイントに対応する電磁ブレーキが設けられている場合、アクチュエータへ駆動電流が供給されていないときに手動でブレーキ機能をオフとするスイッチやレバーが設けられていてもよい。図1に示すロボットアーム101の場合、第1〜第6の電磁ブレーキ161〜166のうちの、水平回転ジョイントである第2、第3、及び第6ジョイント132、133、及び136に対応する第2、第3、及び第6の電磁ブレーキ162、163、及び166が手動でブレーキ機能をオフすることができる構成としてもよい。図3に示すロボットアーム301の場合、第1〜第3の電磁ブレーキ361〜363のうちの、水平回転ジョイントである第2、第3ジョイント332、333に対応する第2、第3の電磁ブレーキ362、363が手動でブレーキ機能をオフすることができる構成としてもよい。図7に示すロボットアーム701の場合、第1〜第6の電磁ブレーキ761〜766のうちの、水平回転ジョイントである第1ジョイント731に対応する第1の電磁ブレーキ761が手動でブレーキ機能をオフすることができる構成としてもよい。図10に示すロボットアーム1001の場合、第1〜第5の電磁ブレーキ1061〜1065のうちの、水平回転ジョイントである第2、及び第5ジョイント1032、及び1035に対応する第2、及び第5の電磁ブレーキ1062、及び1065が手動でブレーキ機能をオフすることができる構成としてもよい。図11に示すロボットアーム1101の場合、第1〜第5の電磁ブレーキ1161〜1165のうちの、水平回転ジョイントである第2、及び第5ジョイント1132、及び1135に対応する第2、及び第5の電磁ブレーキ1162、及び1165が手動でブレーキ機能をオフすることができる構成としてもよい。図12に示すロボットアーム1201の場合、第1〜第3の電磁ブレーキ1261〜1263のうちの、水平回転ジョイントである第2、第3ジョイント1232、1233に対応する第2、第3の電磁ブレーキ1262、1263が手動でブレーキ機能をオフすることができる構成としてもよい。図17に示すロボットアーム1701の場合、第1〜第6の電磁ブレーキ1761〜1766のうちの、水平回転ジョイントである第2、第3、及び第6ジョイント1732、1733、及び1736に対応する第2、第3、及び第6の電磁ブレーキ1762、1763、及び1766が手動でブレーキ機能をオフすることができる構成としてもよい。図18に示すロボットアーム1801の場合、第1〜第3の電磁ブレーキ1861〜1863のうちの、水平回転ジョイントである第2、第3ジョイント1832、1833に対応する第2、第3の電磁ブレーキ1862、1863が手動でブレーキ機能をオフすることができる構成としてもよい。さらに、図27のようにモータで駆動されるスライド機構を有するロボティックベッドの場合、スライド機構を駆動するモータにも電磁ブレーキを設け、当該電磁ブレーキのブレーキ機能を手動でオフとする構成としてもよい。
各構成例におけるロボットアームには、ロボティックベッドの可動範囲を走査する距離センサ173・373・773・1073・1173・1273・1773・1873・2773が設けられていることが望ましい。図1において、ロボットアーム101の可動範囲は、第2ジョイント132の回転中心である第2軸を中心とする、ロボットアーム101とテーブル108を最大に伸長させたときのテーブル108の末端までを半径とする扇状の範囲である。図3において、ロボットアーム301の可動範囲は、第2ジョイント332の回転中心である第2軸を中心とする、ロボットアーム301とテーブル308を最大に伸長させたときのテーブル308の末端までを半径とする扇状の範囲である。図7において、ロボットアーム701の可動範囲は、第1ジョイント731の回転中心である第1軸を中心とする、ロボットアーム701とテーブル708を最大に伸長させたときのテーブル708の末端までを半径とする扇状の範囲である。図10において、ロボットアーム1001の可動範囲は、第2ジョイント1032の回転中心である第2軸を中心とする、ロボットアーム1001とテーブル1008を最大に伸長させたときのテーブル1008の末端までを半径とする扇状の範囲である。図11において、ロボットアーム1101の可動範囲は、第2ジョイント1132の回転中心である第2軸を中心とする、ロボットアーム1101とテーブル1108を最大に伸長させたときのテーブル1108の末端までを半径とする扇状の範囲である。図12において、ロボットアーム1201の可動範囲は、第2ジョイント1232の回転中心である第2軸を中心とする、ロボットアーム1201とテーブル1208を最大に伸長させたときのテーブル1208の末端までを半径とする扇状の範囲である。図17において、ロボットアーム1701の可動範囲は、第2ジョイント1732の回転中心である第2軸を中心とする、ロボットアーム1701とテーブル1708を最大に伸長させたときのテーブル1708の末端までを半径とする扇状の範囲である。図18において、ロボットアーム1801の可動範囲は、第2ジョイント1832の回転中心である第2軸を中心とする、ロボットアーム1801とテーブル1808を最大に伸長させたときのテーブル1808の末端までを半径とする扇状の範囲である。図27において、ロボットアーム2701の可動範囲は、第2ジョイント2732の回転中心である第2軸を中心とする、ロボットアーム2701とスライド機構でテーブル2708を一端側に寄せて最大に伸長させたときのテーブル2708の末端までを半径とする扇状の範囲である。
テーブルまたはロボットアームには、テーブル108・308・708・1008・1108・1208・1708・1808・2708の高さを検出する高さセンサ174・374・774・1074・1174・1274・1774・1874・2774が設けられていることが望ましい。この場合、制御装置107・307・707・1007・1107・1207・1707・1807・2707は、テーブル108・308・708・1008・1108・1208・1708・1808・2708を検査装置内へ移動する前に、高さセンサ174・374・774・1074・1174・1274・1774・1874・2774により検出されるテーブル108・308・708・1008・1108・1208・1708・1808・2708の高さが所定範囲内にあるか否かを判定し、所定範囲内にない場合には、テーブル108・308・708・1008・1108・1208・1708・1808・2708を検査装置内へ移動しないように制御する。この構成によれば、テーブルまたは被験者の検査装置との接触や衝突の危険が回避される。なお、上記においては移動目標位置として検査位置を例に挙げたが、これが測定装置による測定位置、撮影装置による撮影位置など、医療に関連する装置内に挿入される場合であっても同様である。
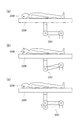
また、各構成例におけるロボットアームは、テーブルやロボットアームの撓みに応じて制御装置によってロボットアームを制御することによりこれを補償する機能を有している。載置対象物の重量などが原因でテーブル3108が撓んだ場合にこれを補正する例を図31に示す。例えば載置対象としての患者の頭部の1点をトラッキングのための目標点と定める場合、ロボットアーム3101の先端(テーブル3108の固定部分)からのx、y、z座標を指定する等により目標点3190を記憶させることができる(図31(a))。そして、図31(b)のようにテーブルが撓んだ場合、目標点3190が例えば右下の方へ移動するため、座標値のズレをロボットアームの制御装置で検知し、制御装置はこのズレを補正するために予め記憶させた目標点3190に戻すようにアクチュエータの少なくともひとつを制御する。図31(c)の例では、ロボットアームのある可動要素を左側へ移動させるとともに、垂直回転ジョイントを時計回りに回転させて補正している。
また、テーブルまたはロボットアームには、載置対象物の重量を計測する重量センサ175・375・775・1075・1175・1275・1775・1875・2775が設けられていることが望ましい。これは、例えば載置対象としての患者の体重を常に監視することを可能とする。この構成によれば、載置対象としての患者を体重面からモニタすることができ、例えば手術開始前の体重を記憶しつつ、出血により減った重量をモニタし、手術時の対応、方針変更の参考とすることができる。そのため、重量センサで検出した数値を表示するための表示部(例えば、表示窓、ディスプレイ)をテーブル又はロボットアームに設けておくことが好ましい。そして、この表示部には複数個の記録した値(例えば手術前と出血を伴う手術を行った直後)や記憶した値と現在の値の差(例えば手術前の値と現在の値の差)を表示できるようにしておくことが好ましい。そのために、メモリなどの記憶手段を設け、この記憶手段にある時点での載置対象物の重量を記憶するようにし、重量センサによって検出した載置対象物の現在の重量と記憶された重量との差を計算するCPUなどの計算部を備えておくことが好ましい。さらに、このような管理を載置対象としての患者ごとにするために、記憶手段は患者IDと対応付けて患者を選択できるようにし、患者ごとにある時点の重量を記憶し、現在の重量との差を計算して表示部に表示できるようにしておくことが好ましい。
また、テーブルには、載置対象物の温度を計測する温度センサ172・372・772・1072・1172・1272・1772・1882・2772が設けられていることが望ましい。これは、例えば載置対象としての患者の温度を常に監視することを可能とする。この構成によれば、載置対象としての患者を体温面からモニタすることができ、例えば手術開始前、手術開始待機中、手術中、手術後の体温をモニタすることができる。そのため、温度センサで検出した数値を表示するための表示部をテーブル又はロボットアームに設けておくことが好ましい。
また、テーブルには、テーブルの周囲の物体を検出するための物体センサを1つ以上設け、ロボットアームの動作中に物体センサにより物体を検知した場合には、ロボットアームを駆動するアクチュエータの動作を停止又は禁止することが好ましい。第1〜第5の構成例で示したようなロボティックベッドを医療室に導入するに際しては、安全性の確保が極めて重要な位置づけを占めることから、このような手段により患者及び医療従事者の安全を確保することが好ましい。
制御装置107・307・707・1007・1107・1207・1707・1807・2707は、図40に示すように、ロボットアーム101、301、701、1001、1101、1201、1701、1801、2701のアクチュエータ、電磁ブレーキおよび位置検出器と接続される。また、制御装置107・307・707・1007・1107・1207・1707・1807・2707は、上述した距離センサ173・373・773・1073・1173・1273・1773・1873・2773、高さセンサ174・374・774・1074・1174・1274・1774・1874・2774、重量センサ175・375・775・1075・1175・1275・1775・1875・2775、および温度センサ172・372・772・1072・1172・1272・1772・1882・2772と接続され得る。また、制御装置107・307・707・1007・1107・1207・1707・1807・2707は、記憶手段を含むとともに、上述した撓み補償を実現するための構成として、目標点の位置を定める設定手段と、当該目標点をトラッキングするトラッキング手段を含んでもよい。
以上説明したロボティックベッドは、術中MRIにおいて用いることにより大きな効果を発揮することが期待できる。脳腫瘍摘出の術中MRIの場合、患者を移動させてMRI装置で脳を撮影する回数は2〜4回、平均3回とされており(「最先端の脳腫瘍完全摘出システムが可能にする生存率向上と術後QOL確保」、日立メディコ、月刊インナービジョン 2012年9月号参照)、手術中に患者を正確かつ迅速にMRI装置による撮影位置と治療位置を往復させる必要性が高い。
第1〜第5の構成例で示したロボティックベッド(場合によっては上述の共通の特徴を付加したロボティックベッド)は、術中MRIのみならず、他の治療等にも適用することができる。
414,1314,1914,2814,3314:MRI装置
121,321,721,1021,1121,1221,1721,1821,2721:ベース
122〜125,322〜323,722〜724,1022〜1024,1122〜1124,1222〜1223,1722〜1725,1822〜1823,2722〜2724:可動要素
131〜136,331〜333,731〜736,1031〜1035,1131〜1135,1231〜1233,1731〜1736,1831〜1833,2731〜2735:ジョイント
141〜146,341〜343,741〜746,1041〜1045,1141〜1145,1241〜1243,1741〜1746,1841〜1843,2741〜2745:アクチュエータ
151〜156,351〜353,751〜756,1051〜1055,1151〜1155,1251〜1253,1751〜1756,1851〜1853,2751〜2755:位置検出器
161〜166,361〜363,761〜766,1061〜1065,1161〜1165,1261〜1263,1761〜1766,1861〜1863,2761〜2765:電磁ブレーキ
171,371,771,1071,1171,1271,1771,1871,2771:固定具
172,372,772,1072,1172,1272,1772,1872,2772:温度センサ
173,373,773,1073,1173,1273,1773,1873,2773:距離センサ
174,374,774,1074,1174,1274,1774,1874,2774:高さセンサ
175,375,775,1075,1175,1275,1775,1875,2775:重量センサ
107,307,707,1007,1107,1207,1707,1807,2707:制御装置
108,308,708,1008,1108,1208,1708,1808,2308,2408,2708,3108,3208:テーブル
Claims (17)
- 患者を載置するためのテーブルと、
前記テーブルを先端で支持するとともに前記テーブルを移動させるように構成されたロボットアームと、を備えており、
前記ロボットアームは、鉛直方向の軸回りに回転可能な水平回転ジョイントによって連結された第1および第2の可動要素と、ベースと、を含み、
前記ロボットアームが前記テーブルを水平面に平行な状態を維持する姿勢をとった状態で前記テーブルを回転させた場合に、前記テーブルと前記ロボットアームとが接触しないように構成されており、
前記ロボットアームは、医師が患者の治療を行う治療位置および患者を前記テーブルに載置する載置位置を含む複数の位置に前記テーブルを移動させるように構成されており、
鉛直方向上側から見下ろした場合に、前記ロボットアームの全体が、前記治療位置および前記載置位置の少なくとも一つの位置に位置づけられた前記テーブルに隠れる姿勢を取るように構成されていることを特徴とするロボティックベッド。 - 前記ロボットアームの先端が最も低い位置をとり、前記テーブルを水平面に平行とした姿勢において、前記ベースの高さは前記テーブルの下面よりも低いことを特徴とする請求項1に記載のロボティックベッド。
- 前記複数の位置が、患者を撮影装置によって撮影する撮影位置を含むことを特徴とする請求項1又は2に記載のロボティックベッド。
- 前記治療位置が、遠隔操作により操作された手術ロボットによって腹腔鏡手術を行うための手術位置を含むことを特徴とする請求項1乃至3の何れかに記載のロボティックベッド。
- 鉛直方向上側から見下ろした場合に前記第1および第2の可動要素が前記水平回転ジョイントを介して直線状に伸びた状態において、水平面に平行な状態を維持しながら前記テーブルを回転させた場合に、前記テーブルと前記ロボットアームとが接触しないように構成されていることを特徴とする請求項1乃至4の何れかに記載のロボティックベッド。
- 前記第2の可動要素が、第2の水平回転ジョイントを介して第3の可動要素と連結されることを特徴とする請求項1乃至5の何れかに記載のロボティックベッド。
- 前記第3の可動要素が、鉛直方向に垂直な方向の軸回りに回転可能な垂直回転ジョイントを介して第4の可動要素と連結されることを特徴とする請求項6に記載のロボティックベッド。
- 前記第1の可動要素が、前記水平回転ジョイントと連結されるのとは反対側の端部において、前記ベースと連結されることを特徴とする請求項1乃至7の何れかに記載のロボティックベッド。
- 前記第1の可動要素と、前記ベースとは、鉛直直進ジョイントによって連結されることを特徴とする請求項8に記載のロボティックベッド。
- 前記ロボットアームの先端は、前記テーブルの一端部または前記テーブルの中央部を支持することを特徴とする請求項1乃至9に記載のロボティックベッド。
- 前記テーブルをスライドさせるためのスライド機構を有することを特徴とする請求項1乃至10の何れかに記載のロボティックベッド。
- 前記スライド機構は、アクチュエータの駆動により前記テーブルが水平面に平行な方向にスライド可能なように制御されることを特徴とする請求項11に記載のロボティックベッド。
- 前記テーブル及びロボットアームの可動範囲を走査する距離センサを備え、
前記距離センサにより前記可動範囲内に物体を検出した場合には、前記ロボットアームを駆動するアクチュエータの動作を停止又は禁止することを特徴とする請求項1乃至12の何れかに記載のロボティックベッド。 - 前記テーブルの高さを検出する高さセンサを備えたことを特徴とする請求項1乃至13の何れかに記載のロボティックベッド。
- 前記テーブルの位置を目標点に対してトラッキングし、前記目標点に対して位置にずれが生じた場合には前記ロボットアームの姿勢を変更して目標点に位置が合うように補正することを特徴とする請求項1乃至14の何れかに記載のロボティックベッド。
- 前記ロボティックベッドまわりのチューブ類を固定するための固定具を、前記テーブル及び前記ロボットアームのうち少なくともひとつに設けたことを特徴とする1乃至15の何れかに記載のロボティックベッド。
- 前記ロボットアームは、前記水平回転ジョイントを含む複数のジョイントと、前記複数のジョイントのそれぞれを駆動するための複数のアクチュエータと、前記複数のアクチュエータのそれぞれに対応して設けられ、各アクチュエータへ駆動電流が供給されない時にブレーキ機能をオンにし、前記駆動電流が供給されたときに前記ブレーキ機能をオフにする複数の電磁ブレーキと、を備え、前記複数の電磁ブレーキのうち少なくともひとつは、前記駆動電流が供給されない時に手動で前記ブレーキ機能をオフとすることが可能なように構成された請求項1乃至16の何れかに記載のロボティックベッド。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/006208 WO2017098544A1 (ja) | 2015-12-11 | 2015-12-11 | ロボティックベッド |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017098544A1 JPWO2017098544A1 (ja) | 2018-09-06 |
| JP6571792B2 true JP6571792B2 (ja) | 2019-09-04 |
Family
ID=59013841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017554667A Active JP6571792B2 (ja) | 2015-12-11 | 2015-12-11 | ロボティックベッド |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20180289574A1 (ja) |
| EP (1) | EP3388041B1 (ja) |
| JP (1) | JP6571792B2 (ja) |
| CN (1) | CN108366898A (ja) |
| WO (1) | WO2017098544A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2918879A1 (en) | 2013-07-24 | 2015-01-29 | Centre For Surgical Invention & Innovation | Multi-function mounting interface for an image-guided robotic system and quick release interventional toolset |
| US10806409B2 (en) * | 2016-09-23 | 2020-10-20 | Varian Medical Systems International Ag | Medical systems with patient supports |
| JP6800058B2 (ja) * | 2017-03-23 | 2020-12-16 | 株式会社メディカロイド | 患者載置用テーブルの移動方法 |
| JP6941359B2 (ja) * | 2017-10-16 | 2021-09-29 | 長田電機工業株式会社 | 診察台 |
| CN107953328A (zh) * | 2017-12-25 | 2018-04-24 | 北京工业大学 | 一种七自由度仿人机械臂 |
| EP3563821A1 (en) * | 2018-05-04 | 2019-11-06 | TRUMPF Medizin Systeme GmbH + Co. KG | Operating table |
| CN109171796A (zh) * | 2018-09-18 | 2019-01-11 | 柳州友助科技有限公司 | 关节式智能ct扫描床 |
| DE102019200187B4 (de) * | 2019-01-09 | 2020-08-06 | Kuka Deutschland Gmbh | Patientenpositioniervorrichtung und medizinischer Arbeitsplatz |
| US11547323B2 (en) * | 2020-02-14 | 2023-01-10 | Siemens Healthcare Gmbh | Patient model estimation from camera stream in medicine |
| CN111436937B (zh) * | 2020-03-16 | 2024-06-11 | 北京东软医疗设备有限公司 | 导管/导丝跟踪方法、装置及扫描设备 |
| EP4134056A1 (en) * | 2021-08-13 | 2023-02-15 | TRUMPF Medizin Systeme GmbH + Co. KG | Medical robotic arm for use with a moveable surgical table |
| CN113663235A (zh) * | 2021-09-26 | 2021-11-19 | 合肥中科离子医学技术装备有限公司 | 放射治疗用的摆位设备 |
| CN115300295B (zh) * | 2022-10-10 | 2023-01-31 | 北京彼岸鸿侨医疗科技有限公司 | 一种仰俯转换治疗床 |
| CN115300296B (zh) * | 2022-10-10 | 2023-01-31 | 北京彼岸鸿侨医疗科技有限公司 | 一种机械臂仰俯转换治疗床 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2540722B2 (ja) * | 1993-12-27 | 1996-10-09 | 技術研究組合医療福祉機器研究所 | 放射線治療装置 |
| JP2005209061A (ja) * | 2004-01-26 | 2005-08-04 | Yaskawa Electric Corp | 自動機械制御装置 |
| US7860550B2 (en) * | 2004-04-06 | 2010-12-28 | Accuray, Inc. | Patient positioning assembly |
| US8160205B2 (en) * | 2004-04-06 | 2012-04-17 | Accuray Incorporated | Robotic arm for patient positioning assembly |
| JP4503366B2 (ja) * | 2004-06-25 | 2010-07-14 | 学校法人早稲田大学 | 超音波診断システム並びにそのロボット制御装置及びロボット制御プログラム |
| EP2203118A4 (en) * | 2007-09-04 | 2011-05-25 | Tomotherapy Inc | PATIENT SUPPORT DEVICE AND METHOD OF OPERATION |
| DK2190530T3 (en) * | 2007-09-13 | 2018-02-19 | Toby D Henderson | PATIENT POSITIONING SYSTEM |
| DE102008019345A1 (de) | 2008-04-17 | 2009-10-22 | Kuka Roboter Gmbh | Röntgenvorrichtung und medizinischer Arbeitsplatz |
| JP5248974B2 (ja) * | 2008-10-16 | 2013-07-31 | 瑞穂医科工業株式会社 | 手術台位置決め装置 |
| JP2010099362A (ja) * | 2008-10-27 | 2010-05-06 | Hitachi Ltd | 放射線治療装置用ベッド装置 |
| JP2012011498A (ja) * | 2010-06-30 | 2012-01-19 | Toshiba Corp | ロボットアーム操作システムおよびその操作方法 |
| EP2944259A1 (de) * | 2014-05-15 | 2015-11-18 | Buck Engineering & Consulting GmbH | Patientenpositioniereinrichtung |
| CN104647338B (zh) * | 2015-01-16 | 2016-05-25 | 哈尔滨工业大学深圳研究生院 | 任务型操作机器人 |
| CN105126261B (zh) * | 2015-10-09 | 2019-01-04 | 温州职业技术学院 | 利用Stewart机器人平台进行跟踪定位的放疗装置 |
-
2015
- 2015-12-11 EP EP15910162.5A patent/EP3388041B1/en active Active
- 2015-12-11 JP JP2017554667A patent/JP6571792B2/ja active Active
- 2015-12-11 CN CN201580085246.6A patent/CN108366898A/zh active Pending
- 2015-12-11 WO PCT/JP2015/006208 patent/WO2017098544A1/ja active Application Filing
-
2018
- 2018-06-08 US US16/003,359 patent/US20180289574A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP3388041B1 (en) | 2023-01-04 |
| WO2017098544A1 (ja) | 2017-06-15 |
| US20180289574A1 (en) | 2018-10-11 |
| EP3388041A1 (en) | 2018-10-17 |
| CN108366898A (zh) | 2018-08-03 |
| EP3388041A4 (en) | 2019-06-05 |
| JPWO2017098544A1 (ja) | 2018-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6571792B2 (ja) | ロボティックベッド | |
| JP6590946B2 (ja) | 医療システム | |
| JP6571791B2 (ja) | ロボティックベッド、及び術中mriシステム | |
| JP6800058B2 (ja) | 患者載置用テーブルの移動方法 | |
| JP6752959B2 (ja) | 医療システム | |
| JP6563891B2 (ja) | ロボット手術台およびハイブリッド手術室 | |
| US8721179B2 (en) | Medical bed apparatus | |
| EP3282997A1 (en) | Integrated medical imaging and surgical robotic system | |
| US20160082596A1 (en) | Mobile medical apparatus | |
| JP6780066B2 (ja) | ロボティックベッド、及び術中mriシステム | |
| US7566171B2 (en) | Device for recording projection images | |
| JP6770097B2 (ja) | ロボット手術台、及び医療システム | |
| US12193859B2 (en) | System for performing robotic surgery | |
| JP2009153579A (ja) | X線ct装置および医用撮像システム | |
| JP6708768B2 (ja) | ロボット手術台およびハイブリッド手術室 | |
| JP6257927B2 (ja) | 診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180516 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190808 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6571792 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |