JP6559464B2 - 作業車両の周囲監視装置 - Google Patents
作業車両の周囲監視装置 Download PDFInfo
- Publication number
- JP6559464B2 JP6559464B2 JP2015099025A JP2015099025A JP6559464B2 JP 6559464 B2 JP6559464 B2 JP 6559464B2 JP 2015099025 A JP2015099025 A JP 2015099025A JP 2015099025 A JP2015099025 A JP 2015099025A JP 6559464 B2 JP6559464 B2 JP 6559464B2
- Authority
- JP
- Japan
- Prior art keywords
- work vehicle
- obstacle
- viewpoint position
- unit
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Landscapes
- Closed-Circuit Television Systems (AREA)
Description
図3〜図5は、作業車両1の各種動作時における監視範囲の一例を示す図である。図3は、作業車両1がフロント作業部1A、旋回または走行が全て停止した状態(このような作業動作を停止した状態を、以下では、単に停止状態と呼ぶ)にある場合の、監視範囲を示す図である。本実施形態における「停止状態」とは、作業車両のエンジンがONであるかOFFであるかに関係なく、フロント作業部の動作、旋回動作、走行動作の全てが停止している状態を示す。破線L1はフロント作業部1Aに関する監視範囲を示し、破線L2は車体1Bに関する監視範囲を示している。
表示画像生成部21において三次元表示画像を生成する際の視点位置は、作業車両1と障害物との位置関係や、障害物の種類によって異なる。以下では、上述した視点位置決定部23においてどのような視点位置が決定されるかについて、障害物と視点位置との関係の代表的な例をあげて説明する。
まず、監視範囲Lの内部に障害物が無い場合について説明する。この場合、視点位置決定部23は、作業車両1の作業状況に応じて視点位置を決定する。作業状況としては、例えば、上部旋回体1dの旋回動作、作業車両1の前後への走行動作、フロント作業部1Aの駆動動作(例えば、掘削動作)などがある。これらの作業状況に応じて視点位置はそれぞれ異なるが、これらを総称して作業対応視点位置と呼ぶことにする。そして、上記の各作業状況に応じた個別の視点位置を、旋回時視点位置、前進時視点位置、後進時視点位置、掘削時視点位置と呼ぶことにする。
図6は、旋回動作時における三次元表示画像の一例を示す。この場合、視点位置は作業車両1の真上の所定位置(以下では、旋回時視点位置と呼ぶ)に設定され、作業車両上方から作業車両1を見下ろしたような三次元表示画像が生成される。監視範囲は図示していないが、右旋回か左旋回かに応じて、図4に示すような監視範囲L1,L2,L3,L4が設定される。もちろん監視範囲を三次元表示画像上に重畳表示するようにしても良い。障害物認識部22はこの監視範囲L1,L2,L3,L4の内部に障害物があるか否かを常に判定している。
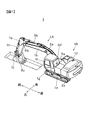
図7は、作業車両1が前進している時の三次元表示画像の一例を示す。作業車両1が前進している場合には、オペレータとしては、作業車両1と車両前方および側方の障害物との位置関係をより詳細に把握する必要がある。そのためには、図7に示すように、作業車両1の後方斜め上方から見た三次元表示画像が好ましい。この場合の視点位置を、ここでは前進時視点位置と呼ぶことにする。前進時視点位置の一例としては、車両中央を前後方向に通る垂直面上であって、車体1Bの中央から後方を見て、仰角45度の方向に選ぶことが考えられる。図7は、この方向の所定高さの位置から作業車両1を見た場合の三次元表示画像である。
図8は、作業車両1が後進している時の三次元表示画像の一例を示す。作業車両1が後進している場合には、オペレータとしては、作業車両1と車両後方および側方の障害物との位置関係をより詳細に把握する必要がある。そのためには、図8に示すように、作業車両1の前方斜め上方から見た三次元表示画像が好ましい。この場合の視点位置を、ここでは後進時視点位置と呼ぶことにする。後進時視点位置の一例としては、車両中央を前後方向に通る垂直面上であって、車体1Bの中央から前方を見て、仰角45度の方向に選ぶことが考えられる。図8は、この方向の所定高さの位置から作業車両1を見た場合の三次元表示画像である。
図9は、掘削作業時における三次元表示画像の一例を示す。掘削作業をよりスムーズに、かつ正確に行うためには、掘削しているバケットと施工面との関係と、そのときの周囲の状況(障害物の状況など)をより詳細に把握する必要がある。そのためには、図9に示すように、作業車両1の斜め前方の斜め上方から見た三次元表示画像が好ましい。この場合の視点位置を、ここでは掘削時視点位置と呼ぶことにする。掘削時視点位置の一例としては、車両中心線から前方斜め右45度の方向であって、上部旋回体1dの中央から前方を見て、仰角45度の方向に選ぶことが考えられる。図9は、この方向の所定高さの位置から作業車両1を見た場合の三次元表示画像である。
次に、監視範囲Lの内部に障害物が有る場合について説明する。この場合、次の3つに区分される。第1は、作業車両1の監視範囲に人物が侵入した場合である。第2は、停止している作業車両1の監視範囲に人物以外の移動障害物が侵入した場合である。第3は、作業車両1が走行移動している場合に、障害物が監視範囲に侵入した場合である。
まず、1番目の、人物が監視範囲に侵入した場合について説明する。この場合、作業車両1に対して人物がどこにいるかが明確に分かる三次元表示画像を提供するのが好ましい。図10は、そのような場合の三次元表示画面の一例を示したものである。図10に示す例では、人物Mの存在する方向から作業車両1を見下ろすような視点位置から見た場合の、三次元表示画像を示している。この場合の視点位置を、ここでは人接近時視点位置と呼ぶことにする。このような画像を表示することで、人物Mが作業車両1の陰に入ることがなく、人物Mが作業車両1のどの方向に接近しているかが容易に認識できる。
図14は、視点位置決定部23で行われる視点位置決定処理の一例を示すフローチャートである。この処理は、監視コントローラ20が起動すると開始され、監視コントローラ20が停止すると終了する。ステップS10では、監視範囲に障害物があるか否か、すなわち、監視範囲に障害物が侵入したという信号が障害物認識部22から入力されたか否かを判定する。監視範囲に障害物が無い場合にはステップS80へ進んで、作業状況に応じた視点位置を決定する処理(作業状況判定処理)を行う。ステップS80の処理は後述する。ステップS80の処理を実行したならば、ステップS10へ戻る。
Claims (3)
- 作業車両の周囲に存在する障害物の位置を含む障害物情報を認識する障害物認識部と、
前記作業車両の位置情報を受信する位置情報受信部と、
前記作業車両の障害物情報を受信する無線受信部と、
前記作業車両の操作信号及び前記障害物情報に基づいて画像を生成する際の視点位置を決定する視点位置決定部と、
前記作業車両の周囲地形に関する三次元データが保持されている情報保持部と、
前記情報保持部に保持されている前記三次元データに基づき、前記視点位置決定部によって決定された前記視点位置からの三次元表示画像を生成する画像生成部と、
前記画像生成部によって生成された前記三次元表示画像が表示される表示装置とを備え、
前記障害物認識部は、前記障害物の位置が監視範囲内であるか否かを判定し、
前記障害物認識部により前記障害物の位置が前記監視範囲外であると判定された場合に、前記視点位置決定部は、前記操作信号が前記作業車両の前進であると判定された場合には、前記視点位置を前記作業車両の後方斜め上方の位置とし、前記操作信号が前記作業車両の後進であると判定された場合には、前記視点位置を前記作業車両の前方斜め上方の位置とし、前記操作信号が前記作業車両の前進でも後進でもないと判定され、かつ前記操作信号が掘削動作であると判定された場合には、前記視点位置を前記作業車両の斜め前方の斜め上方位置とすることを特徴とする作業車両の周囲監視装置。 - 請求項1記載の作業車両の周囲監視装置において、
前記障害物認識部は、前記位置情報受信部で受信された前記作業車両の位置情報、前記無線受信部で受信された前記作業車両の障害物情報及び前記三次元データに基づいて、前記障害物の種類及び位置を認識することを特徴とする作業車両の周囲監視装置。 - 請求項1記載の作業車両の周囲監視装置において、
前記視点位置決定部は、前記操作信号が旋回動作であると判定された場合には、前記視点位置を前記作業車両の真上の所定位置とすることを特徴とする作業車両の周囲監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015099025A JP6559464B2 (ja) | 2015-05-14 | 2015-05-14 | 作業車両の周囲監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015099025A JP6559464B2 (ja) | 2015-05-14 | 2015-05-14 | 作業車両の周囲監視装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016219864A JP2016219864A (ja) | 2016-12-22 |
| JP2016219864A5 JP2016219864A5 (ja) | 2018-04-26 |
| JP6559464B2 true JP6559464B2 (ja) | 2019-08-14 |
Family
ID=57581622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015099025A Active JP6559464B2 (ja) | 2015-05-14 | 2015-05-14 | 作業車両の周囲監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6559464B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240117604A1 (en) * | 2022-10-05 | 2024-04-11 | Deere & Company | Automatic mode for object detection range setting |
| US12097870B2 (en) | 2022-09-07 | 2024-09-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Intuitive two-dimensional warning indicator systems and methods |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11173785B2 (en) * | 2017-12-01 | 2021-11-16 | Caterpillar Inc. | Operator assistance vision system |
| JP7159599B2 (ja) * | 2018-04-10 | 2022-10-25 | 株式会社アイシン | 周辺監視装置 |
| JP7245019B2 (ja) * | 2018-09-28 | 2023-03-23 | カワサキモータース株式会社 | 走行データ表示方法、プログラム及びシステム |
| WO2020189687A1 (ja) * | 2019-03-20 | 2020-09-24 | 株式会社クボタ | 収穫機 |
| JP7174485B2 (ja) * | 2019-03-20 | 2022-11-17 | 株式会社クボタ | 収穫機 |
| JP7175245B2 (ja) * | 2019-07-31 | 2022-11-18 | 日立建機株式会社 | 作業機械 |
| JP7428588B2 (ja) * | 2020-05-22 | 2024-02-06 | 鉄建建設株式会社 | 建設車両用映像表示システム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007085091A (ja) * | 2005-09-22 | 2007-04-05 | Hitachi Constr Mach Co Ltd | 作業現場の安全管理装置及びこれに適用される作業機械 |
| US9113047B2 (en) * | 2010-10-22 | 2015-08-18 | Hitachi Construction Machinery Co., Ltd. | Peripheral monitoring device for working machine |
-
2015
- 2015-05-14 JP JP2015099025A patent/JP6559464B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12097870B2 (en) | 2022-09-07 | 2024-09-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Intuitive two-dimensional warning indicator systems and methods |
| US20240117604A1 (en) * | 2022-10-05 | 2024-04-11 | Deere & Company | Automatic mode for object detection range setting |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016219864A (ja) | 2016-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6559464B2 (ja) | 作業車両の周囲監視装置 | |
| AU2017318897B2 (en) | Image display system for work machine | |
| AU2016227095B2 (en) | Image display system for work machine, remote operation system for work machine, and work machine | |
| US10544567B2 (en) | Method and system for monitoring a rotatable implement of a machine | |
| JP6727971B2 (ja) | 作業車 | |
| JP4776491B2 (ja) | 作業機械の周囲監視装置 | |
| CN110494613B (zh) | 工作机械 | |
| JP7058569B2 (ja) | 作業機械 | |
| KR20190117626A (ko) | 작업 기계 | |
| JP7420733B2 (ja) | 表示制御システムおよび表示制御方法 | |
| WO2006106685A1 (ja) | 作業機械の周囲監視装置 | |
| WO2020189194A1 (ja) | 作業機械の接触防止装置 | |
| JP7458155B2 (ja) | 表示システム、遠隔操作システム、及び表示方法 | |
| JP2024028438A (ja) | 作業機械の画像表示システム及び作業機械の画像表示方法 | |
| WO2017188230A1 (ja) | 建設機械 | |
| JP7436339B2 (ja) | 表示制御装置及び表示方法 | |
| WO2023002796A1 (ja) | 掘削機械の稼働範囲設定システムおよびその制御方法 | |
| JP7128497B2 (ja) | 作業機械の画像表示システム | |
| JP6923144B2 (ja) | 作業機械の画像表示システム | |
| JP7333551B2 (ja) | 作業機械の画像表示システム | |
| WO2020241640A1 (ja) | 表示システムおよび表示方法 | |
| JP2021158465A (ja) | 遠隔操作用のデータ表示システム | |
| JP2024116653A (ja) | 周辺監視装置、周辺監視装置の制御方法及び周辺監視装置の制御プログラム | |
| JP2021075883A (ja) | 作業機械の周囲監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160914 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20161012 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161130 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190717 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6559464 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |