JP6548206B2 - 水中船光ファイバネットワーク - Google Patents
水中船光ファイバネットワーク Download PDFInfo
- Publication number
- JP6548206B2 JP6548206B2 JP2014210691A JP2014210691A JP6548206B2 JP 6548206 B2 JP6548206 B2 JP 6548206B2 JP 2014210691 A JP2014210691 A JP 2014210691A JP 2014210691 A JP2014210691 A JP 2014210691A JP 6548206 B2 JP6548206 B2 JP 6548206B2
- Authority
- JP
- Japan
- Prior art keywords
- communication
- underwater vehicle
- communication network
- network
- fiber optic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000835 fiber Substances 0.000 title claims description 65
- 238000004891 communication Methods 0.000 claims description 142
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 39
- 238000010295 mobile communication Methods 0.000 claims description 14
- 238000000034 method Methods 0.000 claims description 11
- 239000013307 optical fiber Substances 0.000 claims description 10
- 238000005516 engineering process Methods 0.000 claims description 7
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 230000005611 electricity Effects 0.000 claims description 3
- 238000013461 design Methods 0.000 description 13
- 230000007123 defense Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 241000251729 Elasmobranchii Species 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000009189 diving Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000004907 flux Effects 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000003491 array Methods 0.000 description 3
- 238000010304 firing Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 238000007726 management method Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 239000000779 smoke Substances 0.000 description 3
- 230000001413 cellular effect Effects 0.000 description 2
- 230000002498 deadly effect Effects 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000004880 explosion Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000013535 sea water Substances 0.000 description 2
- 239000003643 water by type Substances 0.000 description 2
- 206010010144 Completed suicide Diseases 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000009429 distress Effects 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000015654 memory Effects 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 239000004449 solid propellant Substances 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images



















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B15/00—Self-propelled projectiles or missiles, e.g. rockets; Guided missiles
- F42B15/01—Arrangements thereon for guidance or control
- F42B15/04—Arrangements thereon for guidance or control using wire, e.g. for guiding ground-to-ground rockets
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/22—Homing guidance systems
- F41G7/2206—Homing guidance systems using a remote control station
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/22—Homing guidance systems
- F41G7/2233—Multimissile systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/22—Homing guidance systems
- F41G7/2273—Homing guidance systems characterised by the type of waves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/22—Homing guidance systems
- F41G7/2273—Homing guidance systems characterised by the type of waves
- F41G7/228—Homing guidance systems characterised by the type of waves using acoustic waves, e.g. for torpedoes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/30—Command link guidance systems
- F41G7/301—Details
- F41G7/308—Details for guiding a plurality of missiles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/30—Command link guidance systems
- F41G7/32—Command link guidance systems for wire-guided missiles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F42—AMMUNITION; BLASTING
- F42B—EXPLOSIVE CHARGES, e.g. FOR BLASTING, FIREWORKS, AMMUNITION
- F42B19/00—Marine torpedoes, e.g. launched by surface vessels or submarines; Sea mines having self-propulsion means
- F42B19/01—Steering control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/007—Preparatory measures taken before the launching of the guided missiles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41G—WEAPON SIGHTS; AIMING
- F41G7/00—Direction control systems for self-propelled missiles
- F41G7/20—Direction control systems for self-propelled missiles based on continuous observation of target position
- F41G7/22—Homing guidance systems
- F41G7/2273—Homing guidance systems characterised by the type of waves
- F41G7/2293—Homing guidance systems characterised by the type of waves using electromagnetic waves other than radio waves
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Traffic Control Systems (AREA)
- Optical Communication System (AREA)
- Radio Relay Systems (AREA)
Description
Claims (21)
- 無人水中機のための通信ネットワークであって、
弾頭を有する無人水中機と、
双方向性であり、前記ネットワーク内部及び前記無人水中機への通信を可能にさせる閉じたリング構造である光ファイバケーブルと、
閉じたリング構造であり、前記ネットワーク内部及び前記無人水中機に電力を供給する発電機に結合されている電力グリッドケーブルと、
前記光ファイバケーブル及び前記電力グリッドケーブルに結合されているノードと、
前記ノードに結合され、前記無人水中機と通信している中継局と、
前記無人水中機と通信し、(i)前記無人水中機の遠隔制御を容易にし(ii)発射前の前記無人水中機の前記遠隔制御のための航行計画をプログラムするように構成された制御センタとを備え、
前記光ファイバケーブル、前記電力グリッドケーブル、前記ノード及び前記中継局は、動作中に水中に位置する能力をもち、
前記無人水中機は、開放水域から水中に発射される能力をもっている、通信ネットワーク。 - 前記無人水中機は、プログラムされエンジンによって動力が供給される水雷である、請求項1に記載の通信ネットワーク。
- 前記通信ネットワークは、複数の無人水中機を含む、請求項1に記載の通信ネットワーク。
- 前記通信ネットワークは、複数の制御センタを含む、請求項1に記載の通信ネットワーク。
- 前記通信ネットワークにおける前記制御センタのいずれかは、前記無人水中機の前記遠隔制御を容易にし、いかなる時点でも前記航行計画をプログラムすることができる、請求項4に記載の通信ネットワーク。
- SONAR技術が偵察のため使用される、請求項1に記載の通信ネットワーク。
- 前記無人水中機は、潜望鏡をさらに備える、請求項1に記載の通信ネットワーク。
- 前記航行計画は、経路、速度プロファイル、標的船の船体サイズシグネチャ、エンジン音シグネチャ、及び放出される弾頭の型を含む、請求項1に記載の通信ネットワーク。
- 前記無人水中機は、前記弾頭が非致命的であるとき、回収可能かつ再使用可能である、請求項8に記載の通信ネットワーク。
- ユーザが前記無人水中機の前記遠隔制御及び前記無人水中機の遠隔制御のための前記航行計画の前記プログラミングを提供する、請求項1に記載の通信ネットワーク。
- 前記ノードは、第2のノードから16.1キロメートルと161キロメートルとの間に位置している、請求項1に記載の通信ネットワーク。
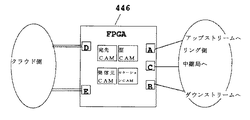
- 前記ネットワーク内部の前記通信は、移動体通信、衛星通信、又は光ファイバ通信による、請求項1に記載の通信ネットワーク。
- アンテナを有し、前記中継局と通信している水中船をさらに備え、
前記水中船が浮上させられたとき、前記水中船は、前記通信ネットワーク内部の移動体通信のための基地局である、請求項1に記載の通信ネットワーク。 - アンテナ付きの潜望鏡を有し、前記中継局と通信している水中船をさらに備え、
前記水中船が浮上させられているとき、前記水中船は、前記通信ネットワーク内部の移動体通信のための基地局である、請求項1に記載の通信ネットワーク。 - 前記ノードは、イーサネット宛先アドレス及びイーサネット発信元アドレスに基づいて動的スイッチングを行うスイッチ又はルータをさらに備える、請求項1に記載の通信ネットワーク。
- 前記中継局と前記無人水中機との間の通信を可能にさせる第2の光ファイバケーブルをさらに備え、
前記中継局と前記無人水中機との間の前記通信は、前記第2の光ファイバケーブルの長さに基づいて前記中継局の周りのある半径に対して維持される、請求項1に記載の通信ネットワーク。 - 前記光ファイバケーブルは、80Gbpsより高い通信スループットを発生させる、請求項1に記載の通信ネットワーク。
- 前記電力グリッドケーブルは、14.4kVより大きい電気を供給する、請求項1に記載の通信ネットワーク。
- 前記発電機は、前記中継局から322キロメートルより遠くに位置している、請求項1に記載の通信ネットワーク。
- 前記ネットワークは、第3の光ファイバケーブルによって第2のネットワークに接続する、請求項1に記載の通信ネットワーク。
- 無人水中機のための通信方法であって、
弾頭を有する無人水中機を準備することと、
双方向性であり、ネットワーク内部及び前記無人水中機への通信を可能にさせる閉じたリング構造である光ファイバケーブルを位置決めすることと、
閉じたリング構造であり、前記ネットワーク内部及び前記無人水中機に電力を供給する発電機に結合されている電力グリッドケーブルを位置決めすることと、
ノードを前記光ファイバケーブル及び前記電力グリッドケーブルに結合することと、
前記無人水中機と通信している中継局を前記ノードに結合することと、
前記無人水中機と通信し、(i)前記無人水中機の遠隔制御を容易にし、及び(ii)発射前の前記無人水中機の前記遠隔制御のための航行計画をプログラムするように構成された制御センタを準備することとを備え、
前記光ファイバケーブル、前記電力グリッドケーブル、前記ノード及び前記中継局は、動作中に水中に位置する能力をもち、
前記無人水中機は、開放水域から水中に発射される能力をもっている、通信方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361891029P | 2013-10-15 | 2013-10-15 | |
| US61/891,029 | 2013-10-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015205677A JP2015205677A (ja) | 2015-11-19 |
| JP6548206B2 true JP6548206B2 (ja) | 2019-07-24 |
Family
ID=54602891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014210691A Expired - Fee Related JP6548206B2 (ja) | 2013-10-15 | 2014-10-15 | 水中船光ファイバネットワーク |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US9297626B2 (ja) |
| JP (1) | JP6548206B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9297626B2 (en) | 2013-10-15 | 2016-03-29 | Ocom Technology LLC | Aquatic vessel fiber optic network |
| WO2017108214A1 (en) * | 2015-12-22 | 2017-06-29 | Siemens Aktiengesellschaft | Data switch for underwater use |
| CN106205256B (zh) * | 2016-06-28 | 2019-06-21 | 青岛果子科技服务平台有限公司 | 一种模拟训练舰艇水下发射操雷定位系统 |
| US20180004216A1 (en) * | 2016-06-29 | 2018-01-04 | Sharp Laboratories Of America, Inc. | Methods and Systems for Autonomously Tracking a Target Object |
| JP6848320B2 (ja) * | 2016-10-06 | 2021-03-24 | 富士ゼロックス株式会社 | 水中移動体 |
| FI128935B (en) | 2017-02-15 | 2021-03-31 | Rolls Royce Oy Ab | Ship monitoring based on directionally captured ambient sounds |
| US10317904B2 (en) * | 2017-05-05 | 2019-06-11 | Pinnacle Vista, LLC | Underwater leading drone system |
| KR102042932B1 (ko) * | 2018-10-26 | 2019-11-08 | 한국해양대학교 산학협력단 | 광역 수중 광통신 방법 및 장치 |
| KR102097279B1 (ko) * | 2018-11-19 | 2020-04-06 | 주식회사 볼시스 | 수중 광통신 장치 간의 통신 거리를 늘리는 장치 |
| KR102137010B1 (ko) * | 2019-01-09 | 2020-07-24 | 주식회사 극동테크 | 부유식 태양전지판의 지지구조물에 결합되는 부력통 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0195300A (ja) * | 1987-10-07 | 1989-04-13 | Mitsubishi Heavy Ind Ltd | 静止型探知装置を備えた水中航走体 |
| JPH01124000A (ja) * | 1987-11-10 | 1989-05-16 | Mitsubishi Heavy Ind Ltd | 水中航走体の遠隔誘導方式 |
| US5748102A (en) * | 1995-09-19 | 1998-05-05 | The United States Of America As Represented By The Secretary Of The Navy | Apparatus for interconnecting an underwater vehicle and a free floating communications pod |
| JP4486211B2 (ja) * | 2000-04-04 | 2010-06-23 | 三菱重工業株式会社 | 機雷処分用航走体および機雷処分方法 |
| US6600695B1 (en) * | 2002-08-19 | 2003-07-29 | The United States Of America As Represented By The Secretary Of The Navy | Method and apparatus for retrieving an unmanned underwater vehicle |
| DE102007031156B4 (de) * | 2007-06-11 | 2009-04-16 | Diehl Bgt Defence Gmbh & Co. Kg | Vorrichtung und Verfahren zur Aussetzung und Bergung eines Unterwasserfahrzeugs und Verfahren zur Andockung eines Unterwasserfahrzeugs an eine solche Vorrichtung |
| US8677920B1 (en) * | 2007-08-30 | 2014-03-25 | Ocom Technology LLC | Underwater vehicle |
| US20090090286A1 (en) * | 2007-10-09 | 2009-04-09 | Korolenko Kryill V | Armed Remotely Operated Vehicle |
| US8340526B2 (en) * | 2009-07-08 | 2012-12-25 | Woods Hole Oceanographic Institution | Fiber optic observatory link for medium bandwidth data communication |
| GB201000662D0 (en) * | 2010-01-15 | 2010-03-03 | Wireless Fibre Systems Ltd | Subsea wireless communication, navigation and power system |
| KR20120009640A (ko) * | 2010-07-19 | 2012-02-02 | 임성호 | 천해용 잠수함 경계 시스템 |
| JP2013120993A (ja) * | 2011-12-06 | 2013-06-17 | Nec Corp | 海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置 |
| US9154234B2 (en) * | 2013-10-09 | 2015-10-06 | Northrop Grumman Systems Corporation | Extended range undersea communication system |
| US9297626B2 (en) | 2013-10-15 | 2016-03-29 | Ocom Technology LLC | Aquatic vessel fiber optic network |
-
2014
- 2014-10-08 US US14/510,086 patent/US9297626B2/en not_active Expired - Fee Related
- 2014-10-15 JP JP2014210691A patent/JP6548206B2/ja not_active Expired - Fee Related
-
2016
- 2016-03-23 US US15/078,196 patent/US9435622B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9435622B1 (en) | 2016-09-06 |
| US9297626B2 (en) | 2016-03-29 |
| JP2015205677A (ja) | 2015-11-19 |
| US20160040968A1 (en) | 2016-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6548206B2 (ja) | 水中船光ファイバネットワーク | |
| US8677920B1 (en) | Underwater vehicle | |
| US5686694A (en) | Unmanned undersea vehicle with erectable sensor mast for obtaining position and environmental vehicle status | |
| US6118066A (en) | Autonomous undersea platform | |
| US20090090286A1 (en) | Armed Remotely Operated Vehicle | |
| US5675116A (en) | Unmanned undersea vehicle including keel-mounted payload deployment arrangement with payload compartment flooding arrangement to maintain axi-symmetrical mass distribution | |
| US9440718B1 (en) | System and methods of using unmanned underwater vehicles (UUVs) along with tethers and tethered devices | |
| AU2019312471B2 (en) | Arrangement and method for wireless data transfer | |
| KR101276977B1 (ko) | 이동식 통신부이를 구비한 무인잠수정 및 그 사출 시스템 | |
| US5786545A (en) | Unmanned undersea vehicle with keel-mounted payload deployment system | |
| US12030603B2 (en) | Modular underwater vehicle | |
| US5690041A (en) | Unmanned undersea vehicle system for weapon deployment | |
| KR20150002986A (ko) | 군사용 수중로봇 및 그 운용방법 | |
| US5675117A (en) | Unmanned undersea weapon deployment structure with cylindrical payload configuration | |
| US5749312A (en) | System for deploying weapons carried in an annular configuration in a UUV | |
| US11683096B2 (en) | Docking system including first and second optical transceivers for docking and related methods | |
| JP2001287694A (ja) | 機雷処分用航走体および機雷処分方法 | |
| JP2016118381A (ja) | 複数の魚雷格納及び発射システム | |
| US6868768B1 (en) | Surf zone mine clearance and assault system | |
| CN106741760A (zh) | 外挂分离式多功能微型潜艇 | |
| RU2652610C1 (ru) | Способ дистанционного минирования | |
| KR102590599B1 (ko) | 함정의 무장발사 제어 시스템 | |
| RU2766639C1 (ru) | Способ управления беспилотной подводной лодкой и устройства для его осуществления | |
| KR20140146282A (ko) | 제해권 장악을 위한 수중 로봇 및 그 운용방법 | |
| Johnson | Unmanned undersea vehicles and guided missile submarines: Technological and operational synergies |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170922 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20190612 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190619 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190612 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6548206 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |