下記の実施形態及びそれらの態様は、典型的かつ例示的であることを意図されたシステム、ツール、及び方法と併せて説明及び例示されており、範囲を限定するものではない。
一実施形態によれば、ハンドルと、ハンドルから延びる剛性スリーブと、相互連結された複数のクリップであって、それぞれが、クリップと一体的な近位バネによって通常開いており、クリップがスリーブに収容されており、クリップが、その遠位端に自動ロック機構を備え、クリップのそれぞれが、スリーブに収容されているときには閉じているとともに、ロックされていないクリップと、ハンドルによって操作可能な留置機構であって、クリップをスリーブの遠位端の方に前進させ、それにより、クリップの最も遠位に位置するクリップをスリーブの遠位端から露出させることによって、留置に備えて、クリップの最も遠位に位置するクリップを配置し、この露出によって、最も遠位に位置するクリップを開き、露出したクリップの自動ロック機構がかみ合うまで、露出したクリップに対してスリーブを前進させて、露出したクリップを生体組織の上で閉じ、それによって、露出したクリップを留置し、露出したクリップに対してスリーブを後退させ、それによって、露出したクリップの近位端に配置された相互連結機構を露出させて、露出したクリップをスリーブに収容されたクリップから分離可能にするように構成されている留置機構とを備える腹腔鏡用クリップアプライヤーを提供する。
いくつかの実施形態では、クリップアプライヤーは、剛性スリーブと、遠位鋭端を有する外側スリーブとを備えるベレスニードルを更に備え、最も遠位に位置するクリップの遠位端が、剛性スリーブに遠位鈍端をもたらし、遠位鋭端によって作られた穿孔を介して、クリップを留置する。
いくつかの実施形態では、クリップアプライヤーは、1つ以上の爪部を更に備え、爪部によって、露出したクリップに加わるモーメントによって、自動ロック機構を起動する。
いくつかの実施形態では、この爪部は、内側スリーブに備わっており、爪部を、露出したクリップに備わった1つ以上の隙間とかみ合わせることによって自動ロック機構を起動する。
いくつかの実施形態では、爪部は、クリップの一対のアームに備わっており、爪部を、前進するスリーブとかみ合わせることによって、自動ロック機構を起動する。
いくつかの実施形態では、自動ロック機構は、露出したクリップのクリップアームの遠位端に配置された弾性フックを備え、弾性フックは外向きに付勢され、クリップがスリーブに収容されているときには、前記弾性フックは内向きに折り畳まれており、クリップをスリーブから露出させると、弾性フックは外向きに突出する。
いくつかの実施形態では、弾性フックの長さは、スリーブの内径よりも大きい。
いくつかの実施形態では、留置機構は、クリップを前進させるプッシャーを備え、プッシャーの近位部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であり、プッシャーの遠位部は、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。
いくつかの実施形態では、クリップを前進させるために、プッシャーをコイル形状から直線の剛性プッシャーへ動かすのを制御するように、留置機構は、プッシャーとかみ合う1つ以上の突起を備える。
いくつかの実施形態では、クリップアプライヤーは、クリップと一致してスリーブを回転させるダイアルを更に備え、プッシャーに設けられたボールソケットジョイントにより、回転するクリップに対してハンドルを静止したままにできる。
いくつかの実施形態では、スリーブに収容され相互連結されたクリップの一対のクリップアームの長さ方向が、スリーブの長さに沿って配向される。
いくつかの実施形態では、クリップは、少なくとも部分的に超弾性材料で作られている。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブ前進工程にわたって一定のままである。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
いくつかの実施形態では、クリップは、ニチノールで作られている。
更に、一実施形態に従って、ハンドルと、ハンドルから延びる剛性スリーブと、相互連結され、通常閉じている複数のクリップであって、クリップがスリーブに収容されており、クリップのそれぞれが、スリーブに収容されているときに閉じているクリップと、ハンドルによって操作可能な留置機構であって、クリップをスリーブの遠位端の方に前進させ、それにより、クリップの最も遠位に位置するクリップをスリーブの遠位端から露出させることによって、留置に備えて、クリップの最も遠位に位置するクリップを配置し、第1の工程で、露出したクリップに対してスリーブを後退させて、クリップのヒンジを圧迫することによって、露出したクリップを開き、第2の工程で、露出したクリップに対してスリーブを後退させて、露出したクリップを生体組織の上で閉じ、露出したクリップに対してスリーブを後退させて、露出したクリップの近位端に配置されている相互連結機構を露出させ、露出したクリップをスリーブに収容されたクリップから分離可能にするように構成されている留置機構とを備える腹腔鏡用クリップアプライヤーを提供する。
いくつかの実施形態では、このクリップアプライヤーは、剛性スリーブと、遠位鋭端を有する外側スリーブとを備えるベレスニードルを更に備え、最も遠位に位置するクリップの遠位端が、剛性スリーブに遠位鈍端をもたらし、遠位鋭端によって作られた穿孔を介してクリップを留置する。
いくつかの実施形態では、後退するスリーブの遠位端に配置された少なくとも1つの突起によって、ヒンジを圧迫する。
いくつかの実施形態では、留置機構は、クリップを前進させるプッシャーを備え、プッシャーの一部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であり、プッシャーの遠位部は、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。
いくつかの実施形態では、クリップを前進させるために、プッシャーをコイル形状から直線の剛性プッシャーへ前進させるのを制御するように、留置機構は、プッシャーとかみ合う1つ以上の突起を備える。
いくつかの実施形態では、クリップアプライヤーは、クリップと一致してスリーブを回転させるダイアルを更に備え、プッシャーに設けられたボールソケットジョイントにより、回転するクリップに対してハンドルを静止したままにできる。
いくつかの実施形態では、相互連結されたクリップの一対のクリップアームは、スリーブとともに、長さ方向に配向される。
いくつかの実施形態では、クリップは、超弾性材料で作られている。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブ後退工程にわたって一定のままである。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
更に、一実施形態に従って、ハンドルと、ハンドルから延びる剛性スリーブと、近位バネによって通常開いている複数のクリップであって、クリップがスリーブに収容されており、クリップが、その遠位端に自動ロック機構を備え、クリップのそれぞれが、スリーブに収容されているときに閉じているとともに、ロックされていないクリップと、ハンドルによって操作可能な留置機構であって、クリップをスリーブの遠位端の方に前進させ、それにより、クリップの最も遠位に位置するクリップをスリーブの前記遠位端から露出させることによって、留置に備えて、最も遠位に位置するクリップを配置し、この露出によって、最も遠位に位置するクリップを開き、露出したクリップの自動ロック機構がかみ合うまで、露出したクリップに対してスリーブを前進させて、露出したクリップを生体組織の上で閉じ、それによって、露出したクリップを留置するように構成されている留置機構とを備える腹腔鏡用クリップアプライヤーを提供する。
いくつかの実施形態では、露出したクリップとハンドルとの距離は、移動、閉鎖、及びロック工程にわたって一定のままである。
いくつかの実施形態では、クリップアプライヤーは、剛性スリーブと、遠位鋭端を有する外側スリーブとを備えるベレスニードルを更に備え、最も遠位に位置するクリップの遠位端が、剛性スリーブに遠位鈍端をもたらし、遠位鋭端によって作られた穿孔を介して、クリップを留置する。
いくつかの実施形態では、留置機構は、クリップを前進及び留置する1つ以上のラチェットを備える。
いくつかの実施形態では、クリップアプライヤーは、1つ以上の爪部を更に備え、爪部によって自動ロック機構を起動する。
いくつかの実施形態では、スリーブに収容されたクリップは、スリーブの回転と一致して回転する。
いくつかの実施形態では、クリップの一対のクリップアームは、スリーブとともに長さ方向に配向される。
いくつかの実施形態では、クリップは、超弾性材料で作られている。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
更に、一実施形態に従って、複数のクリップと、複数のクリップを収容する剛性スリーブであって、クリップの一対のクリップアームの長さ方向が、スリーブの長さに沿って配向されるスリーブと、スリーブの遠位端に設けられた針によって作られた穿孔を介して、複数のクリップをスリーブの遠位端から留置する留置機構とを備える腹腔鏡用クリップアプライヤーを提供する。
いくつかの実施形態では、スリーブと針がベレスニードルを形成する。
いくつかの実施形態では、クリップアプライヤーは、留置機構を操作するハンドルを更に備える。
いくつかの実施形態では、留置機構は、クリップをスリーブ内で前進させて、スリーブに収容されたクリップの最も遠位に位置するクリップをスリーブの遠位端から露出させるクリップ前進機構を備える。
いくつかの実施形態では、留置機構は、露出したクリップに対してスリーブを前進及び後退させ、それによって、露出したクリップの留置を制御するスリーブ操作機構を更に備える。
いくつかの実施形態では、クリップは、近位クリップの遠位端に配置されたヘッドであって、遠位クリップの近位端に配置されたテールに相互連結されたヘッドを介して、スリーブ内で相互連結している。
いくつかの実施形態では、クリップ前進機構は、クリップをスリーブ内で前進させるプッシャーを備え、プッシャーの近位部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であり、遠位部は、スリーブを貫通して、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。
いくつかの実施形態では、クリップアプライヤーは、スリーブをクリップと一致して回転させるダイアルを更に備え、プッシャーに設けられたボールソケットジョイントにより、回転するクリップに対してハンドルを静止したままにできる。
いくつかの実施形態では、クリップはそれぞれ、通常開いており、クリップは、閉じているとともに、ロックされていない構成でスリーブに収容されている。
いくつかの実施形態では、クリップはそれぞれ自動ロック機構を備える。
いくつかの実施形態では、クリップアプライヤーは、モーメントを加えてクリップを閉じるとともに、自動ロック機構を起動する1つ以上の爪部を更に備える。
いくつかの実施形態では、爪部は、スリーブの遠位端に備わっており、留置機構は、クリップ前進機構によって、クリップを前進させて、スリーブに収容された最も遠位に位置するクリップをスリーブの遠位端から露出させ、スリーブ操作システムによって、露出したクリップに対してスリーブを前進させ、それによって、爪部を、露出したクリップのクリップアーム上に設けた隙間とかみ合わせ、クリップの自動ロック機構がかみ合うまで、クリップアームを閉じるモーメントを加え、それによって、クリップを生体組織の上でロックし、スリーブ操作システムによって、露出したクリップに対してスリーブを後退させ、それによって、露出したクリップの近位端に配置された相互連結機構を露出させて、露出したクリップをスリーブに収容されたクリップから分離可能にすることによってクリップを留置する。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブを前進及び後退させる工程にわたって一定のままである。
いくつかの実施形態では、爪部は、クリップに備わる一対のクリップアームに配置されており、留置機構は、クリップ前進機構によってクリップを前進させて、スリーブに収容された最も遠位に位置するクリップをスリーブの前記遠位端から露出させ、スリーブ操作システムによって、露出したクリップに対してスリーブを前進させ、それによって、スリーブの遠位端を爪部に押し付け、クリップの自動ロック機構がかみ合うまで、クリップアームを閉じるモーメントを加え、それによって、クリップを生体組織の上で閉じ、スリーブ操作システムによって、露出したクリップに対してスリーブを後退させ、それによって、露出したクリップの近位端に配置された相互連結機構を露出させ、露出したクリップをスリーブに収容された前記クリップから分離可能にすることによってクリップを留置する。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブを前進及び後退させる工程にわたって一定のままである。
いくつかの実施形態では、自動ロック機構は、露出したクリップのクリップアームの遠位端に配置された弾性フックを備え、弾性フックは外向きに付勢され、クリップがスリーブ内に収容されているときには、弾性フックは内向きに折り畳まれ、クリップをスリーブから露出させると、弾性フックは外向きに突出し、弾性フックの長さはスリーブの直径よりも大きい。
いくつかの実施形態では、クリップ前進機構は、第2のスリーブと、スリーブに収容されたクリップを前進及び留置するために、スリーブに設けられた複数のラチェットとを更に備える。
いくつかの実施形態では、クリップは、通常閉じており、閉じた構成でスリーブに収容されている。
いくつかの実施形態では、クリップアプライヤーは、1つ以上の突起をスリーブの遠位端に更に備え、留置機構は、クリップ前進機構によって、スリーブに収容されたクリップを前進させて、スリーブ内の最も遠位に位置するクリップの少なくとも一部をスリーブの遠位端から露出させ、スリーブ操作システムによって、少なくとも部分的に露出したクリップに対してスリーブを後退させて、突起を、露出したクリップの近位端に設けられたクリップヒンジとかみ合わせ、クリップヒンジを圧迫することによってクリップを開き、スリーブ操作システムによって、露出したクリップに対してスリーブを後退させて、爪部をクリップヒンジから外し、それによって、クリップアームを生体組織の上で閉じ、スリーブ操作システムによって、露出したクリップに対してスリーブを後退させ、それによって、露出したクリップの近位端に配置された相互連結機構を露出させて、露出したクリップをスリーブに収容されたクリップから分離可能にすることによってクリップを留置する。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブを前進及び後退させる工程にわたって一定のままである。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
一実施形態に従って、一対のクリップアームと、アームの遠位端に設けられた自動ロック機構と、アームを連結するヒンジバネであって、ヒンジがアームを付勢して開くヒンジバネと、自動ロック機構の遠位端に配置された相互連結ヘッドと、ヒンジバネの近位端に配置された相互連結テールとを備える外科手術用クリップであって、相互連結ヘッドと相互連結テールによって、クリップのうちの複数のクリップを相互連結可能である外科手術用クリップを提供する。
いくつかの実施形態では、クリップアームは、スリーブとかみ合って自動ロック機構を起動する1つ以上の爪部を備える。
いくつかの実施形態では、クリップアームは、スリーブとかみ合って、自動ロック機構を起動する1つ以上の隙間を備える。
いくつかの実施形態では、自動ロック機構は、露出したクリップのクリップアームの遠位端に配置された弾性フックを備え、弾性フックは外向きに付勢され、クリップがスリーブ内に収容されているときには、弾性フックは内向きに折り畳まれ、クリップをスリーブから露出させると、弾性フックは外向きに突出する。
更に、一実施形態に従って、一対のクリップアームと、アームを連結するヒンジバネであって、ヒンジがアームを付勢して閉じ、ヒンジバネが、圧縮されると、クリップアームを開くように構成されているヒンジバネと、クリップアームの遠位端に配置された相互連結ヘッドと、ヒンジバネの近位端に配置された相互連結テールとを備える外科手術用クリップであって、相互連結ヘッドと相互連結テールにより、クリップのうちの複数のクリップを相互連結可能である外科手術用クリップを提供する。
更に、一実施形態に従って、腹腔鏡用クリップアプライヤーを用いてクリップを留置する方法であって、クリップアプライヤーに設けられた剛性スリーブに収容された外科手術用クリップを留置するために、クリップアプライヤーを配置する工程であって、スリーブが、相互連結された複数の外科手術用クリップを収容し、クリップのそれぞれが、スリーブに収容されているときには閉じているとともに、ロックされておらず、クリップのクリップアームが、スリーブの長さと長さ方向で揃っており、クリップが、その遠位端に自動ロック機構を備え、クリップと一体的な近位バネによって、通常は開いている工程と、スリーブから延びるハンドルを操作して、クリップをスリーブの遠位端の方に前進させ、それによって、最も遠位に位置するクリップをスリーブの遠位端から露出させることによって、留置に備えて、最も遠位に位置するクリップを配置する工程であって、この露出によって、最も遠位に位置するクリップを開く工程と、露出したクリップの自動ロック機構がかみ合うまで、露出したクリップに対してスリーブを前進させて、露出したクリップを生体組織上で閉じ、それによって、露出したクリップを留置する工程と、露出したクリップに対してスリーブを後退させて、露出したクリップの近位端に配置された相互連結機構を露出させ、露出したクリップをスリーブに収容されたクリップから分離可能にする工程とを含む方法を提供する。
いくつかの実施形態では、最も遠位に位置するクリップの部分をスリーブの遠位端から露出させる工程が、クリップアプライヤーに含まれるベレスニードルで体腔壁を穿孔することを更に含み、ベレスニードルが、剛性スリーブと、遠位鋭端を有する外側スリーブとを備え、最も遠位に位置するクリップの遠位端が、剛性スリーブに遠位鈍端をもたらし、遠位鋭端によって作られた穿孔を介してクリップを留置する。
いくつかの実施形態では、露出したクリップに対してスリーブを前進させて、露出したクリップを閉じてロックする工程が、クリップアプライヤーに設けられた1つ以上の爪部によって、クリップにモーメントを加えることを更に含む。
いくつかの実施形態では、爪部が、内側スリーブに備わっており、爪部を、クリップに設けられた1つ以上の隙間とかみ合わせることによって、自動ロック機構を起動する。
いくつかの実施形態では、爪部が、露出したクリップの一対のアームに備わっており、爪部をスリーブとかみ合せることによって、自動ロック機構を起動する方法。
いくつかの実施形態では、自動ロック機構をかみ合わせる工程が、露出したクリップのクリップアームの遠位端に配置された弾性フックを、露出したクリップの別のクリップアームとかみ合わせることを含み、弾性フックは外向きに付勢され、クリップがスリーブ内に収容されているときには、弾性フックは内向きに折り畳まれ、クリップをスリーブから露出させると、弾性フックは外向きに突出し、弾性フックの長さは、スリーブの直径よりも大きい。
いくつかの実施形態では、クリップを前進させる工程が、クリップを前進させるプッシャーを前進させることを更に含み、プッシャーの一部が、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であり、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。
いくつかの実施形態では、上記の方法は、クリップを前進させるために、プッシャーをコイル形状から直線の剛性プッシャーへ前進させるのを制御するように、プッシャーとかみ合う1つ以上のラチェットを更に含む。
いくつかの実施形態では、上記の方法は、ハンドルに設けられたダイアルを回転させて、スリーブに収容されたクリップをスリーブの回転と一致して回転させることを更に含み、プッシャーに設けられたボールソケットジョイントにより、回転するクリップに対してハンドルを静止したままにできる。
いくつかの実施形態では、スリーブは、相互連結されたクリップの一対のクリップアームの長さ方向をスリーブの長さに沿って配向させた状態で、相互連結されたクリップを収容する。
いくつかの実施形態では、スリーブは、超弾性材料で作られているクリップを収容する。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブ前進工程にわたって一定のままである。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
更に、一実施形態に従って、腹腔鏡用クリップアプライヤーを用いて、クリップを留置する方法であって、クリップアプライヤーに設けられた剛性スリーブに収容された外科手術用クリップを留置するために、クリップアプライヤーを配置する工程であって、スリーブが、それぞれ、クリップと一体的な近位バネによって通常は閉じている相互連結された複数の外科手術用クリップを収容し、クリップが、スリーブに収容されているときには閉じている工程と、スリーブから延びるハンドルを操作して、クリップをスリーブの遠位端の方に前進させ、それによって、最も遠位に位置するクリップをスリーブの前記遠位端から露出させることによって、留置に備えて、最も遠位に位置するクリップを配置し、第1の工程で、露出したクリップに対してスリーブを後退させて、クリップのヒンジを圧迫することによって、露出したクリップを開き、第2の工程で、露出したクリップに対してスリーブを後退させて、露出したクリップを生体組織の上で閉じ、露出したクリップに対してスリーブを後退させて、露出したクリップの近位端に配置された相互連結機構を露出させ、露出したクリップをスリーブに収容されたクリップから分離可能にする工程とを含む方法を提供する。
いくつかの実施形態では、最も遠位に位置するクリップの部分をスリーブの遠位端から露出させる工程は、クリップアプライヤーに設けられたベレスニードルで体腔壁を穿孔することを更に含み、ベレスニードルは、剛性スリーブと、遠位鋭端を有する外側スリーブとを備え、最も遠位に位置するクリップの遠位端は、剛性スリーブに遠位鈍端をもたらし、遠位鋭端によって作られた穿孔を介してクリップを留置する。
いくつかの実施形態では、ヒンジを圧迫する工程は、後退させるスリーブの遠位端に配置された少なくとも突起によって圧迫することを含む。
いくつかの実施形態では、クリップを前進させる工程は、クリップを前進させるプッシャーを前進させることを更に含み、プッシャーの一部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であり、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。
いくつかの実施形態では、上記の方法は、クリップを前進させるために、プッシャーをコイル形状から直線の剛性プッシャーへ前進させるのを制御するように、プッシャーとかみ合う1つ以上のラチェットを更に含む。
いくつかの実施形態では、上記の方法は、ハンドルに設けられたダイアルを回転させて、スリーブに収容されたクリップをスリーブの回転と一致して回転させることを更に含み、プッシャーに設けられたボールソケットジョイントによって、回転するクリップに対してハンドルを静止したままにできる。
いくつかの実施形態では、スリーブは、相互連結されたクリップの一対のクリップアームの長さ方向をスリーブの長さに沿って配向した状態で、相互連結されたクリップを収容する。
いくつかの実施形態では、スリーブは、相互連結されたクリップであって、超弾性材料で作られているクリップを収容する。
いくつかの実施形態では、露出したクリップとハンドルとの軸方向距離は、スリーブ後退工程にわたって一定のままである。
いくつかの実施形態では、剛性スリーブの直径は、細径腹腔鏡用である。
更に、一実施形態に従って、細径腹腔鏡用クリップアプライヤーを用いてクリップを留置する方法であって、複数の外科手術用クリップを収容する剛性スリーブから外科手術用クリップを留置するために、クリップアプライヤーを配置する工程であって、クリップの一対のクリップアームの長さ方向が、スリーブの長さに沿って配向される工程と、スリーブの遠位端に配置された針によって作られた穿孔を介して、複数のクリップをスリーブの遠位端から留置する工程とを含む方法を提供する。
いくつかの実施形態では、針によって作られた穿孔を介して、クリップをスリーブの遠位端から留置する工程が、ベレスニードルによって留置することを含む。
図面を参照するとともに、下記の詳細な説明を検討することによって、上記の例示的な態様及び実施形態に加えて、更なる態様及び実施形態が明らかになるであろう。
本発明の例示的実施形態は、細径腹腔鏡用クリップアプライヤーと使用法に関し、腹腔鏡手術は、必ずしもそうとは限らないが、典型的には、直径が2〜3mm以下のツールを使用することを指し、細径腹腔鏡装置は、スリーブの直径が約3mm以下の装置である。腹壁上の切開のサイズ、並びに付随する副作用及び合併症を軽減するために、外科手術用クリップを装着させる器具のサイズを最小限にすることと、それらを3mm未満まで小さくすることが望ましい。これらの器具は、経皮的に導入して、トロカールの必要なしに、腹壁又は胸腔などの他の体腔壁を穿刺してよい。その場合、穿刺部のサイズは更に小さくなり、器具を取り除いた後、収縮する。
概して、本発明の細径腹腔鏡用クリップアプライヤーは、複数の外科手術用クリップとともに、外科的切開を要することなく、それらのクリップを組織の上に留置するための細径腹腔鏡デリバリーシステムを備えるので、患者に与える痛みを軽減し、臨床的回復が速くなり、整容が向上する。本発明のクリップアプライヤーは、腹腔又は胸腔(これらに限らない)などの体腔の中に経皮的に導入してよい。本発明のシステムは特に、細径腹腔鏡用クリップの装着方法での使用について説明されているが、本発明はこれに限定されず、他の腹腔鏡装着事例にも使用できることは分かるであろう。下記のシステム及び方法は、細径腹腔鏡用クリップの装着について言及しているが、腹腔鏡用クリップの装着にも同様に適用可能であるので、細径腹腔鏡用クリップの装着に関するいかなる言及も、腹腔鏡用クリップの装着にも同様に関係するものと理解できる。
図1〜8(その全体にわたり、同様のパーツには同様の参照番号が付されている)は、本発明による細径腹腔鏡用クリップアプライヤーと使用法を示している。図面を参照しながら本発明について説明していくが、多くの代替的な形状によって本発明を具現化できることを理解されたい。加えて、当業者であれば、本発明の趣旨及び範囲に沿ったままの形で、要素又は材料のサイズ、形、又はタイプなど、開示されているパラメーターを変更する様々な方法が分かるであろう。
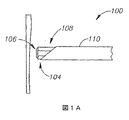
図1A〜Cを以下で参照していくが、図1A〜Cは、それらが合わさって、細径腹腔鏡用クリップを装着するためのシステムであって、本発明の実施形態に従って作用するシステムを簡略的に示す図を示している。図1Aのシステムでは、細径腹腔鏡用クリップアプライヤー100には、1つ以上の外科手術用クリップ102(図示なし)が配置されていてよい。クリップ102の更に詳細な説明は、図2及び3A〜Bと関連させて後述されている。
クリップアプライヤー100には、体腔壁を穿刺するのに適する鋭端104と鈍端106(いずれかのクリップ102の遠位端を構成してよい)を組み合わせて留置することによって、複数のクリップ102を経皮的に装着させる針機構が配置されていてよい。例えば、アプライヤー100の遠位端は、ベレスニードルを構成してよい。
クリップアプライヤー100には、遠位鈍端を有する任意に応じて堅いか又は剛性の内側スリーブ108であって、複数のクリップ102を収容するための内側スリーブ108が配置されていてよい。スリーブ108に収容されるクリップは、スリーブの長さに沿って長さ方向が配向されるアームを有してよく、スリーブ108に収容されたクリップ102のうち、最も遠位に位置するクリップ102の遠位端が、鈍端106を形成してよい。鋭端104は、内側スリーブ108を包み込むとともに、針をアプライヤー100にもたらす外側スリーブ110の遠位端を形成してよい。鋭端104及び鈍端106は、内側スリーブ108と外側スリーブ110を移動させるなどによって、互いに対して動かしてよく、それにより、鋭端104と鈍端106を交互に露出又は後退させる。
下記の例は、当該技術分野において知られているようなベレスニードルの構成によって、外科手術用クリップを留置することを説明している。図1Aを参照すると、システム100の遠位端が体腔壁112の外側にあるときには、内側スリーブ108と外側スリーブ110を連結するバネ(図示なし)が、内側スリーブ108とつながっている鈍端106を付勢して突出させ、外側スリーブ110と一体化された鋭端104を付勢して後退させる。
図1Bを参照すると、針を体腔壁に押し付けると、その組織壁が鈍端106を後方に押して、鈍端106を後退させ、鋭端104を露出させ、それにより、体腔壁の穿刺を可能にする。
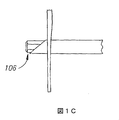
図1Cを参照すると、体腔壁の穿刺後、いずれかの隣接する器官を損傷から保護するために、バネが鈍端106を付勢して、鋭端104を越えて突出させてよい。この方式では、クリップ102を収容するスリーブの遠位端から、鋭端104によって作られた穿孔を介してクリップ102を留置して、制御された形で安全にクリップ102を体腔に装着可能にする。これについては、下で更に詳細に説明していく。
あるいは、先端104及び106の前進及び後退は、術者が制御してよい。
下記の工程は、本発明の実施形態に従って、図1A〜Cのシステムを用いてクリップを経皮的に留置する例示的な方法を説明している。鋭端、鈍端、及び外科手術用クリップが配置された針を体腔壁に押し付けてよい。鈍端を体腔壁によって押し戻し、それによって、鈍端を後退させて、鋭端を露出させてよい。体腔壁は、鋭端によって穿刺してよい。穿刺後、鋭端及び鈍端とつながっているバネを解放し、鈍端を前方に押して、鋭端よりも前に動かすことによって、周囲組織を鋭端から保護してよい。下記の方法を適用するなどによって、クリップを鈍端から前進させて、留置することによって、血管などの組織をクリップで結紮してよい。
本発明の実施形態とともに作用するクリップ102を示している図2Aを以下で参照する。クリップ102は、ステンレス鋼、チタン、又は標準的なニチノール、プラスチック、弾性又は生分解性材料などのいずれかの好適な材料から作られていてよい。いくつかの実施形態では、クリップは、少なくとも部分的に超弾性材料で作られている。いくつかの実施形態では、クリップ102の長さは、2mm〜30mmの範囲であってよく、任意に応じて5mm〜20mmの範囲であってよい。いくつかの実施形態では、クリップの直径は、1mm未満であってよい。いくつかの実施形態では、クリップの直径は、2mm未満であってよい。いくつかの実施形態では、クリップの直径は、3mm未満であってよい。いくつかの実施形態では、システム100は、約20個のクリップを収容してよく、別の実施形態では、システム100は、10〜20個のクリップ、又は5〜10個のクリップを収容してよい。クリップ102は、生体組織を結紮するときに、少なくとも1Nの力を印加してよい。別の実施形態では、結紮組織を圧迫する有効長は、クリップの長さの少なくとも70%であってよい。
クリップ102には、アーム112a及び112bの遠位端に位置してロック機構114を形成するロックユニット114a及び114bによって、血管などの生体組織を結紮するように構成されているアーム112a及び112bが配置されていてよい。例えば、ロックユニット114a及び114bは、一方のアームの溝又は凹部に一致する、他方のアームの突起を備える圧搾式アーム間ロック機構によるワンウェイロック機構をもたらしてよい。あるいは、クリップロック機構は、圧搾したときに、クリップの近位端の凹部又は穴とかみ合う突起、又はアームの向こう側で前方に押され、組織に近接して組織を圧迫するリングを備えてもよい。
アーム112a及び112bは、特定の機能性に合わせて様々な形状に構成させてよい。例えば、クリップアームには、組織の把持性及び結紮性を向上させるように、組織と接触する面の上の1つ以上のセレーション、歯、又は粗面が配置されていてよく、あるいは、アームは滑らかであってもよく、アームは、湾曲していて、圧搾したときに円弧形状を有してもよく、あるいは、直線であってもよい。
クリップアーム112a及び112bは、前進してスリーブ108から出たら、アーム112a及び112bを付勢して開くように構成されている一体形成ヒンジ116のようなヒンジによって連結されていてよい。クリップ102は、モーメントを加えてクリップを閉じて、クリップロック機構を起動するように、アーム112a及び112bから分岐する1つ以上の可撓性又はバネ性爪部118とともに配置してよい。有益なことに、爪部118は、アーム112a及び112bと平行になるように構成されており、それによって、クリップ102がスリーブ108内でスムーズに前進可能になる。クリップ102を前進させて、スリーブ108の遠位端から露出させたら、ヒンジ116は、アーム112a及び112bを付勢して開き、爪部118をアーム112a及び112bから外向きに広げて、クリップ102を閉じてロックできるようにしてよい。このことは、下で更に詳細に説明する。クリップ102は、組織がヒンジ116の中に入るのを妨げるように、リングなどのバリア120を備えてよい。加えて、バリア120は、アーム112a及び112bに横方向の安定性を付与して、横向きのモーメントを低減し、クリップ102を留置する際の制御性を向上できる。
クリップ102は、スリーブ108に収容されたクリップ102を相互連結する相互連結機構122を更に備えてもよい。機構122は、遠位クリップに配置された「テール」122bであって、近位に位置する「テール」122bを連結させるように、近位クリップに配置された「ヘッド」122aであって、遠位に位置する「ヘッド」122aを備え、それによって、スリーブ108に収容されたクリップを連結することができる。相互連結されたクリップ102は、下に更に詳細に説明されているプッシャーによって、スリーブ108内で前進させることができる。例えば、一実施形態では、ヘッド122a及びテール122bは、「握手する」ような形で相互連結するように構成されたフックであることができる。一実施形態では、スリーブ108内で最も遠位に位置するクリップのヘッド122aが鈍端106を形成することができる。留置したら、スリーブ108を横に移動させて、留置したクリップのテール122bを隣のクリップのヘッド122aから外すなどして、遠位クリップ102aと、そのすぐ近位に位置する隣のクリップ102bとの2つを連結する相互連結機構122を解除することによって、遠位クリップ102aを隣のクリップ102bから分離してよい。
この方式では、クリップアーム112a及び112bの長さ方向をスリーブ108の長さに沿って配向させた状態で、クリップを連続して配列して、遠位に位置するクリップのテール122bを、近位に位置するクリップのヘッド122aとかみ合わせることによって、留置に備えて、相互連結した複数のクリップ102をスリーブ108に収容することができる。この方式では、近位に位置するクリップを前進させると、スリーブ内の残りのクリップが前進して、最も遠位に位置するクリップを留置に備えて配置することができる。
相互連結機構122は、スリーブ108内にぴったりフィットして、クリップ102の左右変位を防ぐことができる。
クリップアーム112a及び112bがロックされるのを防ぎながら、クリップ102を互いに近接させて収容できる形で、クリップ102を内側スリーブ108内に収容することができる。例えば、クリップロック機構114に圧力を加えずにクリップ102を収容するのに十分な大きさの直径を有するように、内側スリーブ108を構成させることによって、アーム間の接触を防ぐことができる。加えて、内側スリーブ108内のクリップアーム間に入るように、1つ以上の細いロッド、ワイヤ、又はストリップ(図示なし)を設けて、アームがロックされるのを防ぐことができる。一実施形態では、内側スリーブ108の直径は、クリップ102を内側スリーブ108内でロックするのを防ぐ形でクリップ102を収容するのに十分な大きさ、例えば、0.2mm〜5mm、任意に応じては1mm〜2.5mmの範囲であってよい。
以下では、本発明の別の実施形態とともに作用するクリップ142の等角図を示している図2Bを参照する。クリップ142は、クリップ102と実質的に同様であってよい。ただし、クリップ142は、円形断面のような丸みを帯びた形状を備えることができるという顕著な特徴を有するので、円筒スリーブ108内でのクリップ142のフィット性が向上し、小刻みに動く余地を軽減して、クリップがねじれてずれるのを防ぐことができる。留置前にクリップ142がスリーブ108内に配置されているときのように、アーム112a及び112bが閉じられており、爪部158が圧迫されているときに、クリップ142が、円筒スリーブ108内にフィットする円筒形状で配置されるように、アーム152a及び152b並びに爪部158(アーム112a及び112b並びに爪部118に当たる)は、半円形断面を備えてよい。同様に、任意に応じてテール162bとかみ合う鈍端162aを形成するヘッド162a(上記のヘッド122a、テール122b、及び端部106に当たる)は、円筒スリーブ108内でのスムーズな移動を可能にして、スリーブ内でずれる可能性を低減するように、円形断面を備えてよい。
以下では図2C〜Dを参照するが、図2C〜Dは、それらが合わさって、本発明の実施形態とともに作用する別のクリップを示している。クリップ1002(上記のクリップ102と同様である)には、アーム1012bの遠位端に配置された弾性フック又は爪部1014cを備えるロック機構1014が配置されていて、アーム1012aを受け入れてクリップ1002をロックし、それによって、クリップのロック機構を起動するようになっていてよい。フック1014cは、通常は外向きに付勢されており、クリップ1002がスリーブ108内に収容されている間は、フック1014cは圧迫されて、アーム1012a及び1012bの間で内向きに押し込まれたり又は折り畳まれたりして、クリップが留置前にロックされるのを防ぐとともに、クリップがスリーブ108内でスムーズに前進できるようにしてよい。クリップ1002を前進させてスリーブ108の遠位端から露出させたら、クリップアーム1012a及び1012bを連結する近位ヒンジ1016が、アームを付勢して開いてよい。加えて、クリップアームが閉じたら、弾性フック1014cがアーム1012aを受け入れられる形で、フック1014cがアーム112bから外向きに突出してよい。
弾性フック1014cの長さは、スリーブ108の内径よりも大きくてよく、クリップアームを覆うスリーブ108を前進させるなどして、クリップアーム1012aをクリップアーム1012bの方に押すことによって、アーム1012aの遠位端をフック1014cとかみ合わせ、それによって、クリップをロックするように、アーム1012aとわずかに重なっていてよい。
一実施形態では、フック1014cは、図2Eに示されているように、クリップ1002をロックするよりも、クリップ1002のロックを解除する場合の方が大きい力を要するラッチ様式又は幾何学的な連動構成1200でアーム1012aとかみ合ってもよい。
この方式では、クリップは、ロック解除位置でスリーブ108内に収容でき、留置中に、爪部又はその他の機構によって付与される差動モーメントを要することなく、閉じてロックできる。さらに、フック1014cの長さによって、クリップアーム1012a及び1012bを互いに対して完全に平行にしなくても、閉じてロック可能にできる。例えば、クリップアームは、アーム間に小さい隙間を備えてよく、フック1014cで閉じてロックしたときに、0度以外の小さい角度をなしてもよい。
以下では図3A〜Cを参照するが、図3A〜Cは、それらが合わさって、アプライヤー100によって上記のクリップを留置する例示的な方法であって、本発明の実施形態とともに作用する方法を示している。下記の説明は、例示目的のみで、クリップ102について言及したものであるが、図3A〜Cの説明は、本明細書に記載されているクリップのいずれの留置にも同様に適用される。
図3Aを参照すると、クリップ102aが、前進してアプライヤー100から出た後に開いた位置で示されており、その前進機構の詳細については、図4A〜C、5A〜B、及び6A〜Cを参照しながら、下で更に詳細に説明していく。内側スリーブ108内に収容している間は、爪部118を圧迫して、爪部118の径方向をアーム112a及び112bと揃えて、アームから突出しないようにして、スリーブ108内でのクリップ102のスムーズな前進を可能にできる。クリップ102をスリーブ108の遠位端の方に前進させたら、アーム112a及び112b並びにヒンジ116を露出させるなど、最も遠位に位置するクリップ102の少なくとも一部をスリーブ108の遠位端から露出させて、アーム112a及び112bを開かせることによって、最も遠位に位置するクリップ102を留置に備えて配置してよい。爪部118の弾性によって、爪部118の近位端を付勢して、アーム112a及び112bから外向きに向かって径方向に爪部118の近位端を突出させてよい。その結果、爪部118の近位端の方が、アーム112a及び112bのなす角度よりも大きい角度をなすことができる。
図3Bを参照すると、内側スリーブ108をクリップアーム112a及び112bの上で前進させるなどして、内側スリーブ108をスリーブ108の遠位端に位置するクリップに対して移動させて、突出している爪部に押し当て、それによって、爪部によってモーメントを加えて、クリップアームを一緒に押して、クリップアームが実質的に互いに対して平行になって、生体組織の上で閉じるようにできる。スリーブ108に、くぼんだ側壁、又は遠位端の切り出したスロットを配置するなどして、クリップアーム112a及び112b内に位置する組織を損傷することなく、スリーブ108がアーム112a及び112bの上で前進できるように、内側スリーブ108に、外形に合わせた遠位端を配置してよい。
配置したクリップに対して内側スリーブを前方に更に動かすと、内側スリーブ108の遠位端を爪部118の近位端に更に押し付けて、爪部118の遠位端をアーム112a及び112bに押し付け、それによって、アーム112a及び112bを一緒に押すモーメントを加え、その結果、図3Cに示されているように、ロック手段114a及び114bをかみ合わせることによって、アームを遠位端でかみ合わせることができる。
クリップを前進させ、留置に備えて、スリーブの遠位端において、最も遠位に位置するクリップを露出させて配置したら、生体組織及びクリップアプライヤーに対する露出したクリップの軸方向距離は、閉鎖及びロック工程にわたり不変であることに留意することができる。これは、配置したクリップを軸方向において静止させたままで、配置したクリップに対してスリーブ108を相対移動させることによって実現する。さらに、スリーブ及びクリップ相互連結手段(下で更に詳細に説明する)が、留置中に径方向の安定性をもたらして、クリップの閉鎖及びロック工程にわたり、クリップの径方向での安定した配向を保持する。
爪部118の近位端によってなされる高さ又は角度の差によって、スリーブ108が組織の上でアーム112a及び112bを合わせてロックするとともに、ロックユニット114a及び114bをかみ合わせるのに必要な差動モーメントをもたらす。
クリップ102は、いずれかの好適な前進技法によって、スリーブ108内で前進させることができる。例示的な前進技法は、下に更に詳細に説明されている。
本発明の別の実施形態による外科手術用クリップを示している図2Fを以下で参照する。クリップ172は、上記のクリップ102及び142と実質的に同様であってよい。ただし、クリップ172には、爪部118の代わりに、アーム182a及び182b(アーム112a及び112bに当たる)の近位端に隙間188を配置できるという顕著な違いを有する。クリップ172の留置は、図3A〜Cと関連させながら上記したクリップ102の留置と同様であってよい。ただし、スリーブ108に当たるスリーブ178には、クリップ172がスリーブ178の遠位端から前進すると隙間188とかみ合う可撓性のスリーブ爪部178aを遠位端に配置できるという顕著な違いを有する。爪部178aは、モーメントを加えてクリップを閉じて、クリップの自動ロック機構を起動できる。爪部178aは、径方向で内向きに付勢して、隙間188とかみ合わせることができるが、クリップがスリーブ178の遠位端から前進したときに、アーム182及び182bに圧力がかからないほど十分に可撓性であることができる。この方式では、上記の機構114に当たるロック機構184をかみ合わせずに、クリップアーム182a及び182bをスリーブ178から露出できる。
クリップ172をスリーブ178内で遠位に前進させると、スリーブ178において最も遠位に位置するクリップ172のヒンジ176をスリーブ178から露出させ、アーム182a及び182bを付勢して開くことができる。内側スリーブの遠位端に設けられた爪部188の弾性は、爪部188の遠位端を付勢して、径方向で内向きに、アーム182a及び182bの方に突出させて、隙間178aとかみ合せることができる。内側スリーブ178を前進させると、内側スリーブ178の爪部188の遠位端を、アーム182a及び182bに設けられた隙間178aに押しつけ、それにより、アーム182a及び182bを一緒に押すモーメントを加え、その結果、図2Cに示されているように、ロック手段184a及び184bをかみ合わせることにより、アーム182a及び182bを遠位端でかみ合わせることができる。
一実施形態では、爪部188は、留置中にスリーブをクリップに対して相対移動させている間、クリップを支えて、クリップのいずれの径方向のずれも防ぐために、近位方向の方が遠位方向よりも広くてもよいとともに、対応するクリップアームをかみ合せる溝を備えてよい。
クリップ172は、いずれかの好適な前進技法によって、スリーブ178内で前進させることができる。例示的な前進技法は、下に更に詳細に説明されている。有益なことに、内側スリーブの遠位端に設けられた爪部であって、クリップアームの対向するくぼみとかみ合う爪部が、内向きに突出することによって、アーム182a及び182b、172bを組織の上で合わせてロックするとともに、ロックユニット184a及び184bをかみ合わせるのに必要な差動モーメントを付与する。
下記の工程は、本発明の実施形態に従って、図3A〜Cのシステムを用いて、クリップを経皮的に留置する例示的方法を説明するものである。クリップアームから分岐するバネ性爪部が配置されたクリップは、その爪部を圧迫してアームと径方向に揃えた状態で、スリーブに収容することによって、クリップをスリーブ内でスムーズに前進可能にする。クリップをスリーブから前進させ、爪部をスリーブから露出させる。クリップヒンジをスリーブから露出させ、クリップアームを開く。バネ性爪部が外向きに延びるとともに、アームから突出することにより、爪部の方がクリップアームよりも大きい角度で広がるようになる。スリーブを前進させ、まず、スリーブの遠位端をクリップアームに押し付け、加わるモーメントによって、組織の上でクリップアームを閉じてから、スリーブの端部を爪部の近位端に押しあてる。爪部によって、クリップアームに更なるモーメントを加える。クリップの遠位端に配置されたロック機構をかみ合わせることによって、クリップアームをロックし、組織を結紮する。
図3Aを参照すると、遠位に位置する「ヘッド」122aと、近位に位置する「テール」122bとを備える相互連結機構122は、隣のクリップを押す各クリップによって、留置に備えて、クリップ102をスリーブ108内で前進可能にできる。最も近位のクリップと相互連結する近位プッシャーを用いて、最も近位のクリップを押すことによって、そのクリップを前進させる。例えば、一実施形態では、ヘッド122aとテール122bは、「握手する」形で相互連結するように構成されたフックであってよい。ヘッド122aは、遠位にあるときには、鈍端106を形成できる。握手する領域である、遠位クリップの相互連結ヘッドと近位クリップのテールは、クリップを開いている間、組織の上でクリップを閉じている間、及びクリップをロックしている間、周囲のスリーブの内腔内に置かれ、その内腔内にぴったりフィットする。そのため、このクリップテール122bは、留置中にしっかり保持されて、回転又は変位を防ぐことになる。クリップを組織の上でロックした後、スリーブを後退させて、握手領域を露出させ、スリーブ108を横方向に動かすことによって、留置したクリップのテール122bを隣のクリップのヘッド122aから外す形で、遠位クリップ102aのすぐ近位に位置する手前のクリップ102bから、遠位クリップ102aを外すことができる。有益なことに、スリーブ108は、クリップ102の位置を変えない形で、横方向に操作可能なように構成されている。相互連結機構122によって相互連結するクリップ102は、スリーブ108に収容された複数のクリップ102を簡潔及び容易に留置可能にでき、最も近位に位置するクリップの動きを制御することによって、スリーブ108内のクリップの前進を術者が制御できるようにする。このことは、下で更に詳細に説明する。
下記の工程は、本発明の実施形態に従って、図3A〜Bのシステムを用いて、留置に備えて、クリップを前進させる例示的方法を説明するものである。その遠位端に針が配置されたスリーブ内にクリップを配置することによって、留置に備えて、複数のクリップを搭載してよい。クリップには、そのクリップの近位端に設けられたテールと相互連結するように構成されているヘッドをクリップの遠位端に設けるなどして、相互連結機構を設けてよい。クリップは、遠位に位置するクリップのテールを、近位に位置するクリップのヘッドとかみ合わせ、それにより、クリップを相互連結させることによって、スリーブ内に連続して配列してよい。
以下では図4A〜Dを参照するが、図4A〜Dは、互いに合わさって、本発明の実施形態に従って、内側スリーブに収容した相互連結クリップの留置を制御する例示的なシステムを示している。下記の説明では、クリップ102について言及しているが、これは例示目的に過ぎず、下記の説明は、本明細書に記載のクリップであって、下記のいずれかの違いを有するいずれかのクリップの留置にも同様に適用可能であってよい。
アプライヤー100は、上記のいずれかのクリップを留置するために、ハンドル430を備える留置機構を操作するハンドル430を備えてよい。
スリーブ108及び110をハンドル430から延ばして、ベレスニードルの外側スリーブ110の遠位端に備わっている鋭端104を用いて作られた、体腔壁内の穿孔を介して、内側スリーブ108に収容されたクリップを留置機構が留置できるようにしてよい。
ハンドル430は、スリーブに収容されたクリップに対してスリーブ108を操作する機構を備えてよい。スリーブ操作機構は、内側スリーブ108を動かして、上記のいずれかのクリップを留置するために、ハンドル430から延びるトリガー432を備えてよい。バネ436を圧縮させて、スリーブ108を前進させ、爪部118又は158を押して、上記の方法に従って、それぞれクリップ102又は142をロックするように、トリガー432は、術者などによるトリガー432の後退移動を伝達できるヒンジ434及びバネ436を介して、内側スリーブ108に連結してよい。トリガー432を解除すると、ヒンジ434を介してバネ436が解放されて、スリーブ108を元の位置に戻すことができる。
ハンドル430は、クリップ172を留置するのにも同様に適用できる。ただし、クリップ102の上でスリーブ178を前進させて、スリーブ178の遠位端に配置された爪部188を、クリップアーム182a及び182bに配置された隙間178aとかみ合わせることによって、クリップアーム182a及び182bを閉じてロックするようにモーメントを加えることができるという顕著な違いがある。
以下では図4A〜Dを参照するが、図4A〜Dは、ハンドル430を用いて、クリップ102を留置する例示的な方法を示している。スリーブ108に収容されたクリップのうち、最も遠位に位置するクリップ102をスリーブの遠位端から露出させて、留置に備えて、いずれかの好適なクリップ前進方法によって配置できる。例示的なクリップ前進方法は、下に更に詳細に説明されている。
図4Aを参照すると、トリガー432が初期の位置にある間は、内側スリーブ108を、後退した位置に置くことができ、クリップ102のアーム112a及び112bを開いた状態にできる。
図4Bを参照すると、トリガー432は、クリップ102に対して近位にしぼるか又は押すことができ、ヒンジ434は、トリガー432の近位方向の動きを伝達して、バネ436を少なくとも部分的に圧縮して、上記のように、スリーブ108を遠位に押し、露出したクリップ102に対してスリーブ108を前進させて、爪部118に押し付け、爪部によってモーメントを加えて、クリップアーム112a及び112bを閉めることができる。
図4Cを参照すると、トリガー432を更に近位に押すことによって、ヒンジ434を介してバネ436を更に圧縮して、露出したクリップに対してスリーブ108を更に前進させ、爪部118に押し付け、爪部によってモーメントを加えることによって、機構114によってクリップ102をロックすることができる。
図4Dを参照すると、トリガー432を解除すると、バネ436を解放でき、これにより、トリガー432が遠位に押されて、スリーブ108を近位に引っ張り、留置したクリップに対してスリーブを後退させて、外側スリーブ110の遠位端に概ね到達させるなどできる。相互連結機構122をスリーブ108の遠位端から露出でき、術者がシフトハンドル430を横方向にして相互連結機構を外すなどして、相互連結ヘッド122aをテール122bから外すことによって、留置したクリップ102を、スリーブ108内に収容された隣の最も遠位に位置するクリップ102から外すことができる。
留置に備えて、内側スリーブの遠位端に上記クリップのいずれかを配置したら、スリーブの移動、クリップの閉鎖、及びクリップのロック工程にわたり、配置したクリップとハンドルとの軸方向距離は一定に保たれることに留意できる。留置にわたり、スリーブをクリップに対して相対移動させるとともに、クリップの軸方向の位置を保つことによって、配置したクリップは、留置中に外れたり、ずれたりすることがない。さらに、クリップからハンドル、すなわち術者までの軸方向距離は一定に保たれる。この方法では、術者は、留置に備えてクリップを正確に配置できるとともに、留置したクリップの位置が変わらないように確かめながら、スリーブを操作することによって、クリップを留置できる。
一実施形態では、スリーブチャネルの外形を長方形のような形まで縮小し、上記のクリップのいずれかがスリーブ内で回転するのを防ぐように、スリーブ108は、その長さの一部に沿って、横方向制限手段を備えてよい。
上記のハンドル機構は例示的なものに過ぎず、スリーブ108又は178を操作して、上記クリップのいずれかを留置するための他の好適な方法を適用してもよいことに留意できる。
下記の工程は、本発明の実施形態に従って、図4A〜Dに示されているハンドルのようなハンドルを操作することによって、留置に備えてクリップを前進させる例示的方法を説明するものである。ヒンジに連結したトリガーを設けて、クリップを留置するために、図3A及び4A〜Cに示されているスリーブを前進させることができる。トリガーを後方又は近位にしぼって、トリガーの近位方向の動きをスリーブの前方又は遠位方向の動きに変換するヒンジを起動できる。この方式では、トリガーをしぼることによって、スリーブを前方向でクリップアームに押し付けて、クリップを閉める。トリガーをしぼって、さらにスリーブをクリップ爪部に押し付け、クリップをロックする。この方式では、トリガーを制御することによって、術者は、クリップの閉鎖とロックを制御できる。
以下では、ハンドル430の留置機構を備えるクリップ前進機構であって、上記のシステム100に従って、留置に備えて、クリップ102を前進させるための機構を示している図5を参照する。下記の説明では、クリップ102に言及しているが、これは例示目的に過ぎず、下記の説明は、本明細書に記載のクリップであって、下記のいずれかの違いを有するいずれかのクリップの留置にも同様に適用可能であってよい。
ハンドル430は、スリーブ108に進入して前進し、それによってクリップ102を留置するプッシャー440を備えてよい。プッシャー440の遠位端は、スリーブ108内の最も近位に位置するクリップ102のテール122bとかみ合う相互連結「ヘッド」122aのような相互連結機構を備えてよい。この方式では、プッシャー440の前進により、相互連結されたクリップ102をスリーブ108内で前進させ、それによって、クリップを留置できる。
一実施形態では、プッシャーの近位部440aは、ハンドル430内に収まるように、コイル状に折り畳んで配置できる。いくつかの実施形態では、プッシャー440aは、ナイロン、ポリエチレンなどの可撓性材料で作製して、プッシャー440aをコイル状に巻くなどしで、ハンドル430内にコンパクトな形で収納可能にしてよく、この場合、延ばしたときのプッシャー440aの長さは、スリーブ108の長さと同程度であってよい。あるいは、別の実施形態では、プッシャー440aは、一体型ヒンジ又は実際のヒンジ(以下に限らないが、ボール型及びソケット型など)によって連結される直線の相互連結部分で作製して、ハンドルに収容する間は、コイル状に巻かれた構成に折り曲げられるように、プッシャーの一部を交互に可撓性にしたり、又は、スリーブに進入して、クリップをスリーブ内で前進させるように、直線及び剛性の構成にしたりできる。いくつかの実施形態では、プッシャー440aをハンドル内でコンパクトな形でコイル状に巻いている間は、細いスリーブ108の長さの大半を用いて、留置用のクリップを収容してよい。クリップを術者が留置する際には、次の留置に備えて、クリップを1つ1つ前進させるなどして、プッシャー440aをスリーブ108内で前進させてよい。
スリーブ108を、スリーブ108内に収容されたいずれかのクリップ102とともに回転させるように、ダイアル448をハンドル430に搭載できる。例えば、スリーブ108は、スリーブ内に収容されたクリップの回転を、スリーブのダイアルによる回転と一致させる手段を備えることができる。いくつかの実施形態では、円形クリップ142のように、クリップのスリーブ内での良好なフィット性によって、クリップ142の向きをスリーブと一致させることができる。クリップの他の実施形態は、クリップをスリーブの回転とともに回転させるように、スリーブ内の隆起部又はその他のいずれかの好適な手段を用いて、一致させた向きを有することができる。
ボールソケットジョイントのようなジョイント440bをプッシャー440に搭載して、相互連結機構122を介してクリップ102につながっているプッシャー440の剛性遠位部を、ハンドル430内に収容されたプッシャー440aの交互可撓性近位部に連結できる。この方式では、スリーブ108内に収容されており、遠位プッシャー440に連結されたクリップは、ハンドル430に収容されたプッシャー440aの近位可撓性部分から独立して、ダイアル448によるスリーブ108の回転と一致して回転でき、回転するクリップに対してハンドルを静止したままにできる。したがって、スリーブ108の向き、及びスリーブ内に収容されたクリップ102のそれに応じた向きは、ハンドルの対応する配向を要することなく、クリップの装着を行う術者にとって利便的な形で、ダイアル448及びジョイント440bによって制御及び操作できる。一実施形態では、ダイアル448は、スリーブ108を360度回転できる。
一実施形態では、プッシャー440は、プッシャー440の動きを制御するハンドル430に設けられたラチェット又は突起442a、442b、及び442cを含むようなラチェット機構442とかみ合う複数の溝440a又は隆起部を有するように構成できる。例えば、突起が、ハンドル内におけるコイル状に巻かれた構成から、クリップをスリーブ内で前進させる剛性構成までプッシャーが前進するのを制御してよい。加えて、突起は、クリップのスリーブ内での後退移動を防ぐことができる。
図6A〜Cを以下で参照するが、図6A〜Cは、それらが合わさって、本発明の実施形態に従って、クリップ102をスリーブ608内で前進させるラチェット機構442の例示的な用途を示している。ラチェット442aは、固定ラチェットであってよく、442bは、移動式ラチェット手段であってよい。これらのラチェット手段は、溝の遠位側と相互作用する直線の角度と、溝の近位側と相互作用する傾斜した角度を備えて、プッシャー440の前進を可能にするとともに、プッシャー440の後退移動を防ぐことができる。同様に、ラチェット手段442cは、ラチェット442bの傾斜した角度と相互作用する傾斜した角度と、溝の近位側と相互作用する直線の角度を備えて、プッシャー432の前進を不可能にするロックラチェットであってよい。
下記のように、バネ446につながっているグリップ444によって、ラチェット機構442a、442b、442cを操作して、術者がプッシャー540を前進させることができるようにできる。
図6Aを参照すると、ラチェット442b及び442cは、ともに、プッシャー440の上側に配置された近位溝440aとかみ合うことができる一方で、ラチェット442aは、プッシャー440の下側に配置された遠位溝440bとかみ合うことができ、この場合、上側及び下側は、プッシャー440の相対的な対向側と理解するものとする。
図6Bを参照すると、グリップ444を前方に押して、バネ446を圧縮して、ラチェット442cを近位溝440aとかみ合った状態から解放し、加えて、ラチェット442aをプッシャー440の下側の溝とかみ合った状態から解放できる。ラチェット442bに取り付けられたグリップ444の前方移動によって、ラチェット442bと溝440aによってかみ合っているプッシャー440を前方に引っ張ることができる。いくつかの実施形態では、グリップ444の操作1回につきプッシャーを前進させる距離は、クリップ1つ分の長さである。バネ446が静止しているときには、図6Bに示されているように、ラチェット442aは、プッシャー440の遠位溝440bとかみ合って、プッシャー440の後退移動を防ぐ一方で、ラチェット442cは、ラチェット442bによって付勢されて、近位溝440aとかみ合い、前方移動を防ぐ。この構成では、プッシャー440はロックされており、それによって、クリップのいずれの前進を防ぐ。
図6Cを参照すると、プッシャー440の前方移動によって、固定ラチェット442aを、ラチェット442bとかみ合っている溝の下側に位置する溝とかみ合わせることができる一方で、ラチェット442cは、プッシャー440上において近位に位置する隣の溝とかみ合うことができる。この方式では、プッシャーは、溝ごとに前進でき、この場合、グリップ444の操作ごとに、プッシャー440の、遠位に位置する溝から近位に位置する溝にラチェット442をかみ合わせることができる。
次の前進に備えて、グリップ444を解除すると、バネ446が解放され、ラチェット442bを近位に、図6Aに示されている状態まで戻すことができる。
この方式では、術者は、バネ446につながっているグリップ444を操作して、プッシャー440を前進させ、それによって、留置に備えて、上記のクリップを前進させることができる一方で、ラチェット442は、プッシャー440の前方移動を制御して、留置に備えて、1度に1つのクリップを配置するとともに、クリップの後退移動を防ぐ。
ラチェット機構442は、例示目的に過ぎず、上記のクリップのスリーブ108内での前進を制御するいずれの好適な方法も、システム100に適用できることに留意できる。
下記の工程は、本発明の実施形態に従って、図5A〜B及び6に示されているシステムを用いるなどして、留置に備えて、クリップを前進させる例示的な方法を説明するものである。プッシャーは、スリーブに収容されたクリップを前進させるクリップアプライヤーに搭載できる。プッシャーは、クリップを連結する機構と同様の相互連結機構などによって、スリーブ内において近位に位置するクリップとかみ合うことができる。バネとつながっているグリップ及び1つ以上のラチェットを操作してプッシャーを前進させるとともに、留置に備えて、クリップを配置することができる。ラチェットは、プッシャーに設けられた遠位溝とかみ合って、グリップの初期位置においてプッシャーの後退移動を防ぐことができる。グリップを押して、バネを延ばし、プッシャーの近位溝が固定ラチェットとかみ合うまで、移動式ラチェットをプッシャーとともに近位溝から前進させることができる。グリップを解除して、バネを後方に解放させ、移動式ラチェットをプッシャーの更に近位の溝に導き、その後の追加の工程に備えるようにできる。プッシャーをスリーブ内に前進させることにより、近位クリップをスリーブの中に前進させ、それによって、留置に備えて、スリーブ内における遠位に位置するクリップを配置できる。有益なことに、グリップ、バネ、及びラチェットは、クリップの長さと等しい距離だけ、プッシャーを前進させるように構成されており、それによって、プッシャーをクリップ1つ分の長さだけ、スリーブの中に前進させ、トリガーを起動することによって、留置に備えて、隣のクリップを配置する。留置に備えて、クリップを配置した後に、プッシャーの更なる前進を防ぐように、追加のラチェットを設けてもよい。
すなわち、図5A〜B及び6A〜Cに示されているシステムを用いて、スリーブ内でのクリップの前進を調整するとともに、図4A〜Cに示されているシステムを用いて、クリップを閉鎖及びロックすることによって、上記のハンドルを用いて、クリップの配置及び留置を術者が制御できる。
上記のシステムは例示的なものに過ぎず、システム100を用いてクリップ102を留置するために、スリーブ内で、留置に備えてクリップを前進させるとともに、クリップのロック機構をかみ合わせるいずれかの好適な機構を適用できることを留意できる。
図7A〜Dを以下で参照するが、図7A〜Dは、それらが合わさって、システム100によって留置するための別の例示的なクリップであって、本発明の実施形態とともに作用するクリップを示している。図7Aを参照すると、クリップ702は、バネループのようなループ形状のクリップヒンジ716とともに、そのループの遠位端から延びるアーム712a及び712b(上方のアームはそのループの下端に連結しており、下方のアームはそのループの上端に連結している)を有することができる。アーム712a及び712bを付勢して閉じるように、かつ圧迫されるとアーム712a及び712bを開くようにヒンジ716を構成するなどして、クリップ702は、通常は閉じているようにできる。クリップ702は、有益なことに、上記のヘッド122a及びテール122bと同様の形で動作する相互連結ヘッド722a及び相互連結テール722bを備え、相互連結されたクリップ102をスリーブ108内で前進させるのと同様の形で、内側スリーブ708を通じて、相互連結されたクリップ702のいずれかを前進可能にする。クリップアーム712a及び712bには、長さ方向のスリットが配置されていてよい。
ハンドル430と同様のハンドル430Aを設けて、上記の図5A〜B及び6A〜Cに記載されているものと同様の形で、クリップ702用の留置機構を動作させることができる。相互連結された複数のクリップ702は、通常閉じた構成で、内側スリーブ708に収容できる。スリーブ708は、ハンドル430Aから延びることができ、クリップ702を内側スリーブ708の遠位端の方に前進させて、スリーブ708において最も遠位に位置するクリップ702をスリーブ708の遠位端から露出させるプッシャー440を備えることができる。
プッシャー440の遠位端には、スリーブ708において最も近位に位置するクリップ702のテール722bとかみ合う相互連結「ヘッド」722aのようなフックを配置できる。すなわち、図7Aを参照すると、術者は、プッシャー440の前進を制御することによって、上記のように、クリップ702のスリーブ708内での前進を制御し、留置に備えてクリップ702を配置できる。
ハンドル430Aは、ハンドル430と実質的に同様であることができる。ただし、クリップ102の場合のように前進するのとは対照的に、トリガー432を起動することにより、スリーブ708を後退させる形で、ヒンジ434を介してスリーブ708に連結できるという顕著な違いがある。例えば、ヒンジ434は、トリガー432の後退移動をスリーブ708の後退移動に変換することによって、スリーブ708をクリップ702に対して後ろに引っ張ることができる。この方式では、下記のように、トリガー432を制御しながら起動することにより、スリーブ708の後退を制御し、クリップを留置できる。
少なくとも1つの突起724を、上記の内側スリーブ108に当たる内側スリーブ708の遠位端に設けて、ヒンジ716とかみ合って、ヒンジ716を圧迫するようにし、それによって、アーム712a及び712bを開くことができる。図7Bに示されているように、図6A〜Cに記載されているものと同様のラチェット機構を用いて、プッシャーを前進させるなどして、クリップアプライヤーに設けられたスリーブの遠位端にクリップ702を配置できる。通常は閉じた構成であるアーム712a及び712bは、内側スリーブ708の遠位端を越えて突出できる一方で、ヒンジ716は、スリーブ708内に収容できる。
図7Cを参照すると、第1の移動工程において、トリガー432を起動して、スリーブ708をクリップ702に対して近位に動かすことによって、配置したクリップ702に対してスリーブ708を後退させることができる。スリーブ708の遠位端に配置された突起724をクリップヒンジ716の遠位部と接触させて、圧力を加えて、クリップアーム712a及び712bを開く形で、クリップヒンジ716をしぼったり又は圧迫したりできる。
図7Dを参照すると、クリップヒンジ716をスリーブ708の遠位端から露出させて、ヒンジ716の近位端に突起720を配置する第2の移動工程では、ヒンジ434につながっているトリガー432を更に起動し、スリーブ708をクリップ702aに対して後退させ、スリーブ708をクリップ702に対して近位に動かすことができる。これにより、突起720によってクリップヒンジ716に加えられる圧力を解除して、アーム712a及び712bを付勢して閉じる自然な状態にクリップヒンジ716を戻すことができる。
露出したクリップに対する第3の後退工程では、スリーブ708を近位に動かして、留置したクリップの相互連結機構722をスリーブ708の遠位端から露出させて、クリップアプライヤーを横方向に動かすなどして、スリーブ708に収容された残りのクリップから、留置したクリップを術者が分離可能にできる。
留置に備えて、クリップ708をスリーブ708の遠位端に配置した時点から、スリーブ708の移動工程全体を通じて、クリップを血管の上で閉じるまでの上記留置段階の間、クリップ702とハンドル430との軸方向距離を一定に保つことができる。クリップ702の留置作業にわたるスリーブ708の移動は、クリップとハンドル、すなわち術者からクリップとの軸方向距離に影響を及ぼさない。この方法では、術者は、留置に備えてクリップを正確に配置して、留置したクリップの位置が変わらないことを確認しながら、スリーブを操作することによって、クリップを留置できる。
下記の工程は、本発明の実施形態に従って、図7B〜Dに示されているクリップを留置する例示的な方法を説明するものである。図6に示されているものと同様のラチェット機構を用いて、プッシャーを前進させることによって、クリップアプライヤーに設けられたスリーブの遠位端にクリップを配置できる。クリップの近位端に配置されたヒンジがスリーブに包まれたまま、クリップアームをスリーブの遠位端から露出できるように、クリップを配置できる。上記のハンドルと同様のハンドルを用いるなどして、第1の後退工程で、スリーブを後退させることができる。スリーブの遠位端に配置された1つ以上の突起は、包まれたヒンジの遠位側とかみ合って、ヒンジを圧搾することによって、ヒンジに圧力を加える。クリップアームは開いていてよい。第2の後退工程でスリーブを後退させて、ヒンジの近位側に突起を配置し、それによって、圧力をヒンジから解除して、クリップアームを閉じてロックし、それによって、クリップを留置できる。第3の後退工程によってスリーブを後退させて、ヒンジと、クリップの近位端に配置された相互連結機構とをスリーブから露出させることができる。留置したクリップを移動させずに、相互連結機構を解除する形で、スリーブを移動させることができる。図6に示されているものと同様のラチェット機構を用いて、プッシャーを再び前進させることによって、クリップアプライヤーに設けられたスリーブの遠位端に、次のクリップを配置することができる。
体腔内への留置に備えて、1つ以上のクリップを前進させるラチェット式カートリッジ機構であって、本発明の実施形態とともに作用するカートリッジ機構を示している図8を以下では参照する。図8Aのシステムでは、クリップ802を収容するように構成されたカートリッジ機構800には、クリップ802を前進させるラチェットのような固定突起とつながっている複数の同心管状構造体又はスリーブが配置されている。クリップ802は、クリップ102と実質的に同様である。ただし、クリップ802には、相互連結機構122が配置されていないので、クリップ802は、下記のラチェット式前進機構を用いるなどして、いずれかの好適な前進機構によって相互連結スリーブ内で前進させるという顕著な違いがある。
クリップ802を収容及び留置するように設けられた1つ以上のスリーブを操作することによって、クリップ102を留置するのと同様の形で、クリップ802を留置するシステム800に、ハンドル430と同様のハンドル機構を設けることができ、このことを以下で説明する。スリーブは、トリガー432と同様のトリガー機構によって操作することができる。
図1Aの内側スリーブ112に当たる最も内側のスリーブ808は、上記と同様の形で、複数のクリップ802を収容することができる。スリーブ808は、カートリッジ800内でのクリップ802の逆行を防ぐように、クリップ802とかみ合う1つ以上の固定突起850を備えることができる。最も内側のスリーブ808を取り囲むか又は包み込む中間スリーブ852は、クリップ802とかみ合って、クリップ802を機構800の遠位端の方に押すように構成されている1つ以上の前進突起854を備えることができる。前進突起854は、クリップ802とかみ合うことができるように、最も内側のスリーブ808に設けられた長手方向の溝又はウィンドウ856を通じて突出するように構成されている。クリップ802を前進させるために、固定突起850は、クリップ802とかみ合って、クリップ802を適所に保つことができる一方で、中間スリーブ852を後ろに所定の距離だけ、例えばクリップの長さだけ、カートリッジ800の近位端の方に引っ張る。続いて、中間スリーブ852を前進させて、前進突起854をクリップ802とかみ合わせ、カートリッジ800の遠位端の方に引っ張ることができる。中間スリーブの、最も遠位に位置する前進突起854Aは、最も遠位のクリップ802とかみ合って、ジョー234を備える1つ以上の溝によって適所に保つなどして、最も内側のスリーブの一対の一体型ジョー856内の留置可能な位置に配置するように構成されている。
突起854Aは、クリップ802を前進させている場合のみにクリップ802とかみ合う形で、鋭端804が配置され図1Aの外側スリーブ110に該当する最も外側のスリーブ810(によって付勢できる。クリップ802を留置に備えてカートリッジ800の遠位端に配置すると、突起854Aは、最も外側のスリーブ810の遠位端を越えて延びることによって、クリップ802とかみ合わないようになる。中間スリーブ852による更なる前進はいずれも、クリップ802を圧迫する役割を果たす。
中間スリーブ852は、最も内側のスリーブ808(図示なし)並びにクリップアーム812a及び812bの上で前進させることができ、それによって、アーム812a及び812bを圧迫して、ロック機構814をかみ合せて、組織の上でロックする。ロック機構を起動するように、上記の実施形態のいずれかにおけるような爪部をクリップ802又はスリーブ802のいずれかに搭載できる。
有利なことに、最後の1つの留置用クリップがスリーブ808内にある場合には、最も外側のスリーブ810を一体型ジョーの上で前進させても、クリップはロックされず、可逆的にクリップアーム812a及び812bを接近させるのみであり、それによって、クリップ802が、スリーブ808内に配置された最後のクリップである場合に、クリップ802の留置を可能にする。
下記の方法は、本発明の実施形態に従って、細径腹腔鏡用クリップアプライヤーを用いてクリップを留置する複数の工程を説明するものである。クリップアプライヤーは、クリップアプライヤーに設けられた剛性スリーブに収容された外科手術用クリップを留置するように配置し、この場合、スリーブは、相互連結された複数の外科手術用クリップを収容し、各クリップは、スリーブに収容されているときには閉じているとともに、ロックされておらず、各クリップは、その遠位端に自動ロック機構を備え、各クリップに配置された一体型近位バネによって通常開いている。スリーブに収容され相互連結されたクリップのクリップアームは、スリーブの長さに沿って長さ方向を配向でき、クリップは、超弾性材料で作ることができる。
いくつかの実施形態では、クリップを露出させることは、クリップアプライヤーに搭載されたベレスニードルで体腔壁を穿孔することを含んでよく、この場合、ベレスニードルは、遠位鈍端を有する内側スリーブと、遠位鋭端を有する外側スリーブを備え、クリップを収容するスリーブは、内側スリーブを構成し、最も遠位に配置されたクリップの遠位端は、遠位鈍端を構成し、遠位鋭端によって作られた穿孔を介してクリップを露出させる。
スリーブから延びるハンドルを操作して、クリップをスリーブの遠位端の方に前進させて、最も遠位に位置するクリップをスリーブの遠位端から露出させることによって、留置に備えて、最も遠位に位置するクリップを配置することができ、この場合、露出させると、クリップが開く。
任意に応じて、クリップをプッシャーによって前進させることができ、この場合、プッシャーの一部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であるとともに、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。クリップを前進させるために、プッシャーをコイル形状から直線の剛性プッシャーに前進させるのを制御するように、1つ以上のラチェットをプッシャーとかみ合わせることができる。
ハンドルに備わったダイアルを回転させて、スリーブに収容されたクリップを、スリーブの回転と一致させて回転でき、この場合、プッシャーに備わったボールソケットジョイントによって、回転したクリップに対して、ハンドルを静止したままにできる。
露出したクリップの自動ロック機構がかみ合うまで、露出したクリップに対してスリーブを前進させて、露出したクリップを生体組織の上で閉じることができ、それによって、露出したクリップを留置するが、この場合、露出したクリップとハンドルとの軸方向距離は、スリーブを前進させる工程にわたって一定のままである。
いくつかの実施形態では、露出したクリップに対してスリーブを前進させて、露出したクリップを閉じてロックすることは、クリップアプライヤーに備わった1つ以上の爪部によって、モーメントをクリップに加えることを更に含む。任意に応じて、爪部を内側スリーブに配置でき、爪部を、クリップに備わった1つ以上の隙間とかみ合わせることによって、自動ロック機構を起動できる。あるいは、爪部をクリップアームに配置でき、爪部をスリーブとかみ合わせることによって、自動ロック機構を起動することができる。
別の実施形態では、自動ロック機構をかみ合わせることは、露出したクリップに備わる一方のクリップアームの遠位端に配置されたフックを、露出したクリップの他方のクリップアームとかみ合わせることを含む。
クリップを閉じてロックしたら、露出したクリップに対してスリーブを後退させて、露出したクリップの近位端に配置された相互連結機構を露出させて、留置したクリップを、スリーブに収容された残りのクリップから分離可能にできる。
下記の方法は、本発明の別の実施形態に従って、細径腹腔鏡用クリップアプライヤーを用いて、クリップを留置する複数の工程を説明するものである。クリップアプライヤーに備わった剛性スリーブに収容された外科手術用クリップを留置するために、クリップアプライヤーを配置するが、この場合、スリーブは、相互連結された複数の外科手術用クリップを収容し、各クリップは、スリーブに収容されているときには閉じており、各クリップに備わった一体型近位バネによって通常閉じている。スリーブに収容された相互連結クリップのクリップアームは、スリーブの長さに沿って長さ方向を配向でき、クリップは、超弾性材料で作ることができる。
いくつかの実施形態では、クリップを露出させることは、クリップアプライヤーに備わったベレスニードルで体腔壁を穿孔することを含むことができ、このベレスニードルは、遠位鈍端を有する内側スリーブと、遠位鋭端を有する外側スリーブとを備え、クリップを収容するスリーブが内側スリーブを構成し、最も遠位に位置するクリップの遠位端が遠位鈍端を構成し、クリップは、遠位鋭端によって作られた穿孔を介して露出させる。
スリーブから延びるハンドルを操作して、クリップをスリーブの遠位端の方に前進させ、最も遠位に位置するクリップをスリーブの遠位端から露出させることによって、最も遠位に位置するクリップを留置に備えて配置させることができる。
任意に応じて、クリップをプッシャーによって前進させることができ、この場合、プッシャーの一部は、プッシャーをコイル状に折り曲げてハンドルに収容できるように、交互に可撓性であるとともに、クリップをスリーブ内で前進させるように、交互に直線かつ剛性である。クリップを前進させるように、1つ以上のラチェットがプッシャーとかみ合って、プッシャーがコイル形状から直線かつ剛性なプッシャーに前進するのを制御できる。
ハンドルに備わったダイアルを回転させて、スリーブに収容されたクリップを、スリーブの回転と一致させて回転でき、この場合、プッシャーに備わったボールソケットジョイントによって、回転したクリップに対して、ハンドルを静止したままにできる。
第1の工程において、露出したクリップに対して、スリーブを後退させて、クリップのヒンジを圧迫することによって、露出したクリップを開くことができる。第2の工程において、露出したクリップに対して、スリーブを後退させて、露出したクリップを生体組織の上で閉じることができ、この場合、露出したクリップとハンドルとの軸方向距離は、スリーブ後退工程にわたり、一定のままであることができる。露出したクリップに対して、スリーブを更に後退させて、露出したクリップの近位端に配置された相互連結機構を露出させて、露出したクリップをスリーブに収容された他のクリップから分離可能にできる。
したがって、進退可能な針の中の外科手術用クリップを操作するために、ユーザーに優しい小型の前進機構を用いるなどして、上記のシステム及び方法に従って腹腔鏡用クリップアプライヤーを配置することによって、従来技術の機器に付きものであるサイズ制限のハードルを克服しながら、胆嚢摘出術、卵巣除去、避妊手術、子宮切除、肥満外科手術、胸腔鏡検査など、侵襲が最小限の特定の医療処置を本発明の器具によって容易に行うことができる。
当業者は、上記の説明を考慮すれば、本発明の多くの修正形態及び代替実施形態が分かるであろう。したがって、本明細書は、例示目的に過ぎず、本発明を実施するための最良の形態を当業者に教示する目的のものと解釈すべきである。構造の詳細は、本発明の趣旨から逸脱しなければ実質的に変更でき、添付の特許請求の範囲内に含まれるあらゆる修正形態の排他的使用が留保される。本明細書内では、明確かつ簡潔な明細を文面化可能にする方式で実施形態について説明してきたが、本発明から逸脱しなければ、実施形態を様々に組み合わせたり又は分離したりできるように意図されているとともに、このことは明らかであろう。本発明は、添付の特許請求の範囲及び適用法によって求められる程度のみに限定されるように意図されている。
下記の特許請求が、本明細書に記載されている本発明のすべての包括的及び具体的な特徴と、文言上、本発明の範囲内に含まれると言える、本発明の範囲のすべての記述とを網羅するものと理解されたい。