JP6517469B2 - 永久磁石回転電機システム - Google Patents
永久磁石回転電機システム Download PDFInfo
- Publication number
- JP6517469B2 JP6517469B2 JP2014034320A JP2014034320A JP6517469B2 JP 6517469 B2 JP6517469 B2 JP 6517469B2 JP 2014034320 A JP2014034320 A JP 2014034320A JP 2014034320 A JP2014034320 A JP 2014034320A JP 6517469 B2 JP6517469 B2 JP 6517469B2
- Authority
- JP
- Japan
- Prior art keywords
- permanent magnet
- magnetization
- torque
- current
- irreversibly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Description
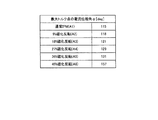
電流位相を変化させた時の最大トルク点の電流位相角を図8に示し、トルク特性を図9に示す。電流は3.5Aである。
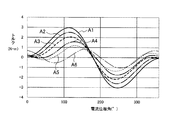
部分的に任意の範囲で磁化反転した場合の可変速特性を磁界解析した。磁化反転領域を0〜45%まで変化させた時のトルク対回転速度(T−N)特性を図10に示す。通常IPMモードでは曲線A1に示すように最大トルクは2.8Nm、基底速度は3200rpm、弱め磁束制御による最高回転速度は5600rpmである。曲線A2に示す9%磁化反転では、最大トルクは2.3Nm、基底速度は3800rpm、弱め磁束制御による最高回転速度は8800rpm、曲線A3に示す18%磁化反転では、最大トルクは1.7Nm、基底速度は4400rpm、弱め磁束制御による最高回転速度は15000rpmとなる。磁化反転して最大トルク位相角を進み方向にシフトすると、中〜高速回転域の出力が向上し、最高回転速度が約3倍までに高くできることがわかった。
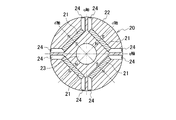
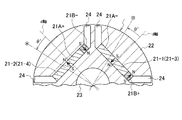
10 固定子
11 電機子巻線
12 固定子鉄心
20 回転子
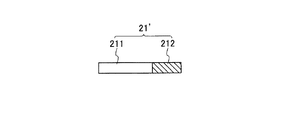
21 永久磁石
21A± 磁化非反転部
21B± 磁化反転部
22 回転子鉄心
23 回転軸
24 (磁気障壁としての)空隙
Claims (3)
- 複数の極数の回転磁界を生じる電機子巻線を有する固定子と、永久磁石を有する回転子から構成された永久磁石回転電機と、
前記永久磁石回転電機の回転を制御する制御装置と
を備え、
前記永久磁石は前記回転子が所定の回転位置になったタイミングで外部磁界により不可逆的に磁化することにより、各磁極における前記永久磁石の片側端部の磁化の度合いの増減又は極性の反転が可能であり、かつ前記磁化の度合いを増減し又は極性を反転する磁石の量を可変にしたことを特徴とする永久磁石回転電機システム。 - 請求項1に記載の永久磁石回転電機システムの前記制御装置が、運転状況に応じて前記永久磁石の磁化状態を不可逆的に変化させる磁石の量を変化させることを特徴とする永久磁石回転電機システム。
- 請求項1又は2に記載の永久磁石回転電機システムにおいて、
前記外部磁界が電機子電流で発生させる磁界であり、前記電機子巻線に通常運転時に流す電流よりも所定倍だけ大きい大電流を所定の短時間だけ流すことにより前記永久磁石の磁化状態を不可逆的に変化させ、
前記永久磁石の各磁極分について、一方の端部は所定以上の前記外部磁界により磁化状態が不可逆的に変化する低保磁力の永久磁石、前記低保磁力の永久磁石の部分を除いた残りの部分は前記所定以上の前記外部磁界によっても磁化状態が不可逆的には変化しない高保磁力の永久磁石で構成し、前記永久磁石における少なくとも不可逆的に磁化状態を変化させる部分の保磁力が500kA/m以下である
ことを特徴とする永久磁石回転電機システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034320A JP6517469B2 (ja) | 2014-02-25 | 2014-02-25 | 永久磁石回転電機システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034320A JP6517469B2 (ja) | 2014-02-25 | 2014-02-25 | 永久磁石回転電機システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019072871A Division JP6705040B2 (ja) | 2019-04-05 | 2019-04-05 | 永久磁石回転電機システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015159691A JP2015159691A (ja) | 2015-09-03 |
| JP6517469B2 true JP6517469B2 (ja) | 2019-05-22 |
Family
ID=54183278
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014034320A Active JP6517469B2 (ja) | 2014-02-25 | 2014-02-25 | 永久磁石回転電機システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6517469B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018085388A (ja) | 2016-11-21 | 2018-05-31 | 株式会社東芝 | 永久磁石、回転電機、及び車両 |
| WO2019049392A1 (ja) | 2017-09-11 | 2019-03-14 | 株式会社 東芝 | 回転電機 |
| ES2983059T3 (es) * | 2018-06-27 | 2024-10-21 | Mitsubishi Electric Corp | Motor eléctrico, soplador y dispositivo de aire acondicionado |
| JP7455697B2 (ja) * | 2020-08-03 | 2024-03-26 | 東芝インフラシステムズ株式会社 | 回転電機の回転子 |
| JP7415876B2 (ja) * | 2020-11-04 | 2024-01-17 | トヨタ自動車株式会社 | モータ |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5332171B2 (ja) * | 2007-10-19 | 2013-11-06 | 三菱電機株式会社 | 永久磁石モータ |
| JP5159577B2 (ja) * | 2008-11-19 | 2013-03-06 | 株式会社東芝 | 永久磁石式回転電機 |
| JP5502571B2 (ja) * | 2010-04-09 | 2014-05-28 | 株式会社東芝 | 永久磁石式回転電機 |
| JP5787673B2 (ja) * | 2011-08-30 | 2015-09-30 | 株式会社東芝 | 永久磁石型回転電機 |
| JP6008311B2 (ja) * | 2012-02-28 | 2016-10-19 | 学校法人 東洋大学 | Tfmモータ及びその運転方法 |
| JP6007609B2 (ja) * | 2012-06-20 | 2016-10-12 | 株式会社ジェイテクト | 回転電機及びこれを備えた車両用操舵装置 |
| JP6019800B2 (ja) * | 2012-06-25 | 2016-11-02 | 日産自動車株式会社 | 電動機の制御装置 |
-
2014
- 2014-02-25 JP JP2014034320A patent/JP6517469B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015159691A (ja) | 2015-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6033424B2 (ja) | 可変起磁力型回転電機、及び可変起磁力型回転電機の制御装置 | |
| JP5134846B2 (ja) | 永久磁石電動機ドライブシステム | |
| JP5812476B2 (ja) | 永久磁石回転電機及びその運転方法 | |
| CN103875177B (zh) | 马达控制器 | |
| JP6019800B2 (ja) | 電動機の制御装置 | |
| JP6517469B2 (ja) | 永久磁石回転電機システム | |
| Hemmati et al. | Field weakening of a surface mounted permanent magnet motor by winding switching | |
| Chen et al. | Optimal combination of stator and rotor pole numbers in flux-switching PM brushless AC machines | |
| Fukushige et al. | Efficiency contours and loss minimization over a driving cycle of a variable-flux flux-intensifying interior permanent magnet machine | |
| CN104467333B (zh) | 转子励磁多相磁阻电机及其控制方法 | |
| JP2016077064A (ja) | 回転電機 | |
| JP6480651B2 (ja) | 永久磁石式回転電機ドライブシステム | |
| JP5127377B2 (ja) | 永久磁石ドライブシステム | |
| JP6325857B2 (ja) | 永久磁石式回転電機 | |
| JP2014007853A (ja) | 電動機 | |
| JP5885423B2 (ja) | 永久磁石式回転電機 | |
| Lu et al. | Design and analysis of a hybrid permanent magnet variable-flux flux-intensifying machine | |
| Zhu et al. | Influence of on-load voltage distortion on torque-speed characteristic of interior permanent magnet machines | |
| Rahimi et al. | Design investigation of hybrid excitation flux switching machine for high-speed electric vehicles | |
| JP5492178B2 (ja) | 可変磁束ドライブシステム | |
| JP6705040B2 (ja) | 永久磁石回転電機システム | |
| JP6371550B2 (ja) | 永久磁石式回転電機 | |
| Yang et al. | A novel stator-consequent-pole memory machine | |
| JP6497231B2 (ja) | モータ制御装置 | |
| Sakai et al. | Permanent magnet motor with reversible salient poles and variable magnetic force |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170227 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170809 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190418 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6517469 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |