JP6507048B2 - 鉄道車両制御システム - Google Patents
鉄道車両制御システム Download PDFInfo
- Publication number
- JP6507048B2 JP6507048B2 JP2015130787A JP2015130787A JP6507048B2 JP 6507048 B2 JP6507048 B2 JP 6507048B2 JP 2015130787 A JP2015130787 A JP 2015130787A JP 2015130787 A JP2015130787 A JP 2015130787A JP 6507048 B2 JP6507048 B2 JP 6507048B2
- Authority
- JP
- Japan
- Prior art keywords
- electromagnetic wave
- rail
- control system
- incident
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Aerials With Secondary Devices (AREA)
- Details Of Aerials (AREA)
- Radar Systems Or Details Thereof (AREA)
Description

Claims (5)
- 輸送車両に搭載され、電磁波を集束レンズによって指向性を有してレールに対して照射し、これの反射波の周波数の変化量を計測して前記輸送車両の速度を算出する速度計測装置と、前記速度計測装置で算出した速度が入力される鉄道車両制御装置と、備えた鉄道車両制御システムにおいて、
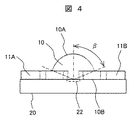
前記速度計測装置は、前記電磁波を前記輸送車両の進行方向に向かって前記レールに対して斜め下方向に照射し、その入射経路と逆方向の経路で戻る一次反射成分と、反射角方向に反射された前記電磁波が、前記輸送車両の床面に設けられ、前記レールにほぼ平行に配置された平面状の形状を有する電磁波反射部材としての平面板に向けて入射し、更にその反射角方向に反射された前記電磁波が前記レールに再び入射し、この入射経路と逆方向の経路で戻る二次反射成分とを計測できる位置で、前記床面に固定され、
更に、前記速度計測装置は、前記電磁波の前記レールへの入射方向と前記レールの間のなす角度を20°以上、40°以下(20°≦θ≦40°)の範囲の入射方向角度を設定して前記輸送車両の前記床面に取り付けられていることを特徴とする鉄道車両制御システム。 - 請求項1に記載された鉄道車両制御システムにおいて、
前記輸送車両の前記床面には、前記速度計測装置を収納して保護すると共に、前記電磁波を照射する開口部を備えた収納室が設けられており、前記収納室に配置された前記速度計測装置からの前記電磁波は、前記収納室に形成された前記開口部から前記レールに向けて照射されることを特徴とする鉄道車両制御システム。 - 請求項2に記載された鉄道車両制御システムにおいて、
前記収納室の前記開口部には、前記電磁波を通過させる保護部材が配されていることを特徴とする鉄道車両制御システム。 - 請求項1に記載された鉄道車両制御システムにおいて、
前記平面板は前記輸送車両の前記床面から吊り下げられ、側面が開放された平面板であることを特徴とする鉄道車両制御システム。 - 請求項1乃至請求項4のいずれか1項に記載された鉄道車両制御システムにおいて、
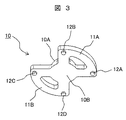
前記速度計測装置は、少なくとも、ミリ波帯、或いはマイクロ波帯の電磁波を発生する電磁波発生手段と、前記電磁波発生手段からの前記電磁波を放射するアンテナと、前記アンテナから放射される前記電磁波を集束する集束レンズとを備えたレーダモジュールをアルミベースとハウジングからなる収納空間に収納し、前記集束レンズに対向するように前記ハウジングに固定されたカバーとからなり、前記アルミベースを介して前記輸送車両の前記床面に取り付けられていることを特徴とする鉄道車両制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015130787A JP6507048B2 (ja) | 2015-06-30 | 2015-06-30 | 鉄道車両制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015130787A JP6507048B2 (ja) | 2015-06-30 | 2015-06-30 | 鉄道車両制御システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017015474A JP2017015474A (ja) | 2017-01-19 |
| JP2017015474A5 JP2017015474A5 (ja) | 2017-11-02 |
| JP6507048B2 true JP6507048B2 (ja) | 2019-04-24 |
Family
ID=57830377
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015130787A Active JP6507048B2 (ja) | 2015-06-30 | 2015-06-30 | 鉄道車両制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6507048B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6530260B2 (ja) * | 2015-06-30 | 2019-06-12 | 日立オートモティブシステムズ株式会社 | 速度計測装置、その取り付け方法、及びそれを取り付けた自動車 |
| EP3764471A4 (en) | 2018-03-07 | 2021-11-10 | NOK Corporation | MILLIMETER RADAR COVER |
| JP7341767B2 (ja) * | 2019-07-23 | 2023-09-11 | 株式会社日立製作所 | 列車制御システム及び列車制御方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5536949B2 (ja) * | 1974-10-01 | 1980-09-25 | ||
| JPS5369090A (en) * | 1976-12-01 | 1978-06-20 | Hitachi Ltd | Doppler radar for vehicle speed detection |
| JPS5544973A (en) * | 1978-09-26 | 1980-03-29 | Nissan Motor Co Ltd | Attachment structure for doppler radar speed sensor |
| JPS57101977U (ja) * | 1980-12-13 | 1982-06-23 | ||
| JPS6057284B2 (ja) * | 1981-04-09 | 1985-12-14 | 三菱電機株式会社 | 車輪の異常回転検知装置 |
| JPS57187677A (en) * | 1981-05-14 | 1982-11-18 | Mitsubishi Electric Corp | Measuring device for speed |
| JPS5899844U (ja) * | 1981-12-26 | 1983-07-07 | 株式会社東芝 | 半導体収納装置 |
| JPS58154681A (ja) * | 1982-03-10 | 1983-09-14 | Nissan Motor Co Ltd | ドツプラレ−ダ車速測定装置 |
| JP2584453B2 (ja) * | 1987-08-19 | 1997-02-26 | 財団法人鉄道総合技術研究所 | 低騒音型ボディマウント式鉄道車両 |
| JPH0720015B2 (ja) * | 1987-12-26 | 1995-03-06 | 株式会社日本自動車部品総合研究所 | 平面アレイアンテナ |
| JPH11189154A (ja) * | 1997-12-25 | 1999-07-13 | Fuji Electric Co Ltd | 車両床下機器用カウルカバーの固定装置 |
| KR100440441B1 (ko) * | 2003-07-25 | 2004-07-14 | 샬롬엔지니어링 주식회사 | 열차의 속도측정장치 |
| JP2009198362A (ja) * | 2008-02-22 | 2009-09-03 | Mitsubishi Heavy Ind Ltd | 移動体の速度測定装置及び速度測定方法 |
| JP6172900B2 (ja) * | 2012-07-23 | 2017-08-02 | 日本信号株式会社 | 列車速度計測装置 |
| JP6121680B2 (ja) * | 2012-10-05 | 2017-04-26 | 日立オートモティブシステムズ株式会社 | レーダモジュールおよびそれを用いた速度計測装置 |
| JP6074322B2 (ja) * | 2013-06-05 | 2017-02-01 | 公益財団法人鉄道総合技術研究所 | 速度計測装置 |
-
2015
- 2015-06-30 JP JP2015130787A patent/JP6507048B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017015474A (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109075456B (zh) | 天线、传感器以及车载系统 | |
| JP3302849B2 (ja) | 車載用レーダーモジュール | |
| JP6507048B2 (ja) | 鉄道車両制御システム | |
| US10921442B2 (en) | Sensor with flat-beam generation antenna | |
| JP2017517993A (ja) | 車両のためのアンテナ装置 | |
| WO2005055366A1 (ja) | 車載用レーダ | |
| JP2006184144A (ja) | 速度センサおよびそれを用いた対地車速センサ | |
| US11408974B2 (en) | Electronic component for emitting and receiving radar signals | |
| JP2018207301A (ja) | アンテナ、アレーアンテナ、レーダ装置及び車載システム | |
| JP2017181480A (ja) | 車載レーダを備えたウィンドシールド | |
| JP6530260B2 (ja) | 速度計測装置、その取り付け方法、及びそれを取り付けた自動車 | |
| US5640700A (en) | Dielectric waveguide mixer | |
| US20220304139A1 (en) | Heatsink Shield with Thermal-Contact Dimples for Thermal-Energy Distribution in a Radar Assembly | |
| US10340605B2 (en) | Planar antenna device | |
| JPH1079616A (ja) | 車載用レーダアンテナ | |
| JP7207905B2 (ja) | レーダ装置 | |
| JP5396052B2 (ja) | レーダ送受信機 | |
| US5600327A (en) | Dielectric waveguide mixer and dielectric waveguide radar module | |
| JP2018529563A (ja) | バックミラーとアンテナを含む車両 | |
| JPWO2020008720A1 (ja) | 測距装置およびウィンドシールド | |
| JP2016161525A (ja) | 速度計測装置 | |
| WO2021039050A1 (ja) | レーダ装置 | |
| WO2022044914A1 (ja) | 車両用レーダシステム及び車両 | |
| JP2007132718A (ja) | 妨害排除能力試験装置 | |
| US7564399B2 (en) | Shielded compartment for mounting a high frequency radar component on a printed circuit board |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180823 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20181217 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6507048 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |