JP6479676B2 - 流体サンプル中の粒子の分類のためのシステム及び方法 - Google Patents
流体サンプル中の粒子の分類のためのシステム及び方法 Download PDFInfo
- Publication number
- JP6479676B2 JP6479676B2 JP2015548214A JP2015548214A JP6479676B2 JP 6479676 B2 JP6479676 B2 JP 6479676B2 JP 2015548214 A JP2015548214 A JP 2015548214A JP 2015548214 A JP2015548214 A JP 2015548214A JP 6479676 B2 JP6479676 B2 JP 6479676B2
- Authority
- JP
- Japan
- Prior art keywords
- particles
- objects
- focus
- image
- stack
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002245 particle Substances 0.000 title claims description 357
- 238000000034 method Methods 0.000 title claims description 74
- 239000012530 fluid Substances 0.000 title description 25
- 230000003287 optical effect Effects 0.000 claims description 55
- 239000007788 liquid Substances 0.000 claims description 54
- 238000001514 detection method Methods 0.000 claims description 36
- 238000013473 artificial intelligence Methods 0.000 claims description 32
- 238000013519 translation Methods 0.000 claims description 27
- 238000012549 training Methods 0.000 claims description 21
- 240000004808 Saccharomyces cerevisiae Species 0.000 claims description 16
- 230000008859 change Effects 0.000 claims description 14
- 238000012360 testing method Methods 0.000 claims description 12
- 241000894006 Bacteria Species 0.000 claims description 8
- 210000001082 somatic cell Anatomy 0.000 claims description 8
- 210000000265 leukocyte Anatomy 0.000 claims description 7
- 239000013078 crystal Substances 0.000 claims description 6
- 210000003743 erythrocyte Anatomy 0.000 claims description 4
- 241000203069 Archaea Species 0.000 claims description 3
- 241000233866 Fungi Species 0.000 claims description 3
- 241000700605 Viruses Species 0.000 claims description 3
- 210000001772 blood platelet Anatomy 0.000 claims description 3
- 210000001616 monocyte Anatomy 0.000 claims description 3
- 210000000130 stem cell Anatomy 0.000 claims description 3
- 210000003714 granulocyte Anatomy 0.000 claims description 2
- 239000000203 mixture Substances 0.000 claims description 2
- 210000000287 oocyte Anatomy 0.000 claims description 2
- 238000004445 quantitative analysis Methods 0.000 claims description 2
- 238000001914 filtration Methods 0.000 claims 1
- 238000012545 processing Methods 0.000 description 54
- 238000010191 image analysis Methods 0.000 description 20
- 210000004027 cell Anatomy 0.000 description 13
- 230000008569 process Effects 0.000 description 10
- 230000033001 locomotion Effects 0.000 description 9
- 230000011218 segmentation Effects 0.000 description 9
- 235000013336 milk Nutrition 0.000 description 7
- 210000004080 milk Anatomy 0.000 description 7
- 239000008267 milk Substances 0.000 description 7
- 238000007635 classification algorithm Methods 0.000 description 5
- 150000002632 lipids Chemical class 0.000 description 5
- 238000005259 measurement Methods 0.000 description 5
- 230000002062 proliferating effect Effects 0.000 description 5
- 210000002700 urine Anatomy 0.000 description 5
- 238000013528 artificial neural network Methods 0.000 description 4
- 238000009499 grossing Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000012512 characterization method Methods 0.000 description 3
- 238000000605 extraction Methods 0.000 description 3
- 230000005653 Brownian motion process Effects 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- 238000000149 argon plasma sintering Methods 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 238000005537 brownian motion Methods 0.000 description 2
- 238000007418 data mining Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000003709 image segmentation Methods 0.000 description 2
- 208000004396 mastitis Diseases 0.000 description 2
- 238000011002 quantification Methods 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 230000035899 viability Effects 0.000 description 2
- 238000002835 absorbance Methods 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 239000003242 anti bacterial agent Substances 0.000 description 1
- 229940088710 antibiotic agent Drugs 0.000 description 1
- 210000003651 basophil Anatomy 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000002902 bimodal effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000000601 blood cell Anatomy 0.000 description 1
- 238000009395 breeding Methods 0.000 description 1
- 230000001488 breeding effect Effects 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000003833 cell viability Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000007876 drug discovery Methods 0.000 description 1
- 210000003979 eosinophil Anatomy 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 210000000554 iris Anatomy 0.000 description 1
- 210000004698 lymphocyte Anatomy 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000877 morphologic effect Effects 0.000 description 1
- 230000035772 mutation Effects 0.000 description 1
- 210000000440 neutrophil Anatomy 0.000 description 1
- 235000016709 nutrition Nutrition 0.000 description 1
- 230000035764 nutrition Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000035755 proliferation Effects 0.000 description 1
- 235000020185 raw untreated milk Nutrition 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 239000011163 secondary particle Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- -1 urine Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/698—Matching; Classification
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/02—Investigating particle size or size distribution
- G01N15/0205—Investigating particle size or size distribution by optical means
- G01N15/0227—Investigating particle size or size distribution by optical means using imaging; using holography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1434—Optical arrangements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/69—Microscopic objects, e.g. biological cells or cellular parts
- G06V20/695—Preprocessing, e.g. image segmentation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/296—Synchronisation thereof; Control thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1429—Signal processing
- G01N15/1433—Signal processing using image recognition
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1434—Optical arrangements
- G01N2015/144—Imaging characterised by its optical setup
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N15/1434—Optical arrangements
- G01N2015/144—Imaging characterised by its optical setup
- G01N2015/1445—Three-dimensional imaging, imaging in different image planes, e.g. under different angles or at different depths, e.g. by a relative motion of sample and detector, for instance by tomography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N15/00—Investigating characteristics of particles; Investigating permeability, pore-volume or surface-area of porous materials
- G01N15/10—Investigating individual particles
- G01N15/14—Optical investigation techniques, e.g. flow cytometry
- G01N2015/1488—Methods for deciding
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10056—Microscopic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Biochemistry (AREA)
- Immunology (AREA)
- Analytical Chemistry (AREA)
- Dispersion Chemistry (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Signal Processing (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Radiology & Medical Imaging (AREA)
- Medical Informatics (AREA)
- Investigating Or Analysing Biological Materials (AREA)
- Image Analysis (AREA)
Description
− 光軸を持つ少なくとも1つの画像収集装置を有し、該画像収集装置が前記光軸に垂直な画像取得領域の画像を収集するように構成された光学検出アセンブリと、
− 液状のサンプルを保持するのに適した少なくとも1つのサンプル容器を有するサンプル装置と、
− 前記サンプル容器の少なくとも一部を介して前記画像取得領域を平行移動させるように構成された平行移動装置と、
− 複数の画像取得領域の画像を収集するために前記光学検出アセンブリ及び前記平行移動装置を制御する制御システムと、
− 前記収集された画像を、
・前記収集された画像により捕捉された個々の粒子のオブジェクト(副画像)を生成するステップと、
・個々の粒子のオブジェクトのスタックを生成するステップと、
・完全なオブジェクトのスタックを識別するステップであって、該完全なオブジェクトのスタックが、
*前記粒子が合焦状態である少なくとも1つのオブジェクト、及び
*前記粒子が非合焦状態(焦点外れ状態)である少なくとも2つのオブジェクト、を有するステップと、
・前記完全なオブジェクトのスタックの各々に対して、少なくともN個の特徴からなる一群の特徴に関する一群の値を決定するステップであって、Nは1以上であり、前記一群の特徴の前記値の決定が、前記粒子が合焦状態である前記少なくとも1つのオブジェクトから得られたデータ及び/又は前記粒子が焦点外れ状態である前記少なくとも2つのオブジェクトから得られたデータを含むステップと、
を有する方法により解析するようプログラムされた画像解析処理システムと、
− 個々の粒子に対する前記決定された一群のフィーチャに関する前記一群の値を、1つの粒子分類に関連付けるようプログラムされた人工知能処理システムと、
を有する。
・面積、周囲長、包囲円の面積等の空間的記述子、
・凸性、偏心性、形状係数等の形態的記述子、及び/又は
・二分モーメント(binary moments)、
等の、閾処理された合焦状態オブジェクトに基づく特徴を有することができる。
・コントラスト、光散乱特性、吸収性等、
・種々のタイプのグレイスケールモーメント、
・焦点の合わされたグレイスケール画像のフーリエ空間において抽出された特徴、及び/又は
・粒度、
等の、合焦状態オブジェクトのグレイスケール版に基づく特徴を有することもできる。
・優勢なカラーパターン、及び/又は
・色調(hue)、
等の、合焦状態オブジェクトのカラー版に基づく特徴を有することもできる。
・FWHM、AUC、当該曲線と平滑化曲線との間の相違、等の当該オブジェクトの種々の焦点曲線の署名(signature)/記述子、
・FWHM、AUC、当該曲線と平滑化曲線との間の相違、等の当該オブジェクトの種々の輝度曲線の署名/記述子、
・グレイスケール/二値特徴を当該オブジェクトスタックの個々のオブジェクトに適用することにより発生される曲線の署名/記述子、
・当該スタックの時間的パラメータの評価、
・位相及び吸収マップ、ブラウン運動並びに自己推進特性、及び/又は
・流動特性、
等の、オブジェクトスタック(即ち、複数の合焦状態及び非合焦状態オブジェクト)からの情報に基づく特徴を有することができる。
・非合焦状態(焦点外れ状態)のオブジェクトに関する特徴、
・合焦状態オブジェクトのグレイスケール版に関する特徴、
・合焦状態オブジェクトのカラー版に関する特徴、合焦状態オブジェクトの閾処理版に関する特徴、及び
・合焦状態及び非合焦状態の両方のオブジェクトに関する特徴、
のうちの少なくとも1つを含む一群の特徴に関する値を決定するようにプログラムされる。
・当該粒子の外周(形状)、
・当該粒子の寸法(断面積)、
・最大及び最小直径間の比、
・色変化(色変化の程度)、及び
・優勢なカラーパターン、
のうちの1つを有することができる。
・当該粒子の外周(形状)、
・当該粒子の寸法(断面積)、
・最大及び最小直径間の比、
・色変化(色変化の程度)、
・優勢なカラーパターン、及び
・当該粒子の外周の内側の副粒子の数、
のうちの少なくとも1つを有することができる。
・或るオブジェクトから他のオブジェクトへの粒子の外周(形状)の差(又は複数の差)、
・或るオブジェクトから他のオブジェクトへの粒子の寸法(断面積)の差(又は複数の差)、
・或るオブジェクトから他のオブジェクトへの最大及び最小直径の間の比の差(又は複数の差)、
・或るオブジェクトから他のオブジェクトへの色変化(色変化の程度)の差(又は複数の差)、
・或るオブジェクトから他のオブジェクトへの優勢なカラーパターンの差(又は複数の差)、
・或るオブジェクトから他のオブジェクトへの色の差(又は複数の差)、及び
・各オブジェクト間の距離、
のうちの少なくとも1つを有する。
− 少なくとも1つの第1タイプの粒子及び少なくとも1つの第2タイプの粒子を一緒に有する1以上の液体サンプルを供給する(準備する)ステップと、
− 前記液体サンプルにおける複数の前記第1タイプの粒子及び複数の前記第2タイプの粒子の少なくとも3つの画像を収集するステップであって、前記個々の第1タイプ及び第2タイプの粒子が、各々、合焦状態又は焦点外れ状態であるステップと、
− 前記収集された画像により捕捉された前記個々の粒子のオブジェクト(副画像)を作成すると共に各第1タイプの粒子及び各第2タイプの粒子に関するオブジェクトのスタックを供給し、且つ、前記粒子が合焦状態である少なくとも1つのオブジェクト及び前記粒子が焦点外れ状態である少なくとも2つのオブジェクトを有する完全なオブジェクトのスタックを識別するステップと、
− 前記オブジェクトのスタックの各々に対して、少なくともN個の特徴からなる一群の特徴を決定するステップであって、Nは1以上であり、該特徴の決定が、前記粒子が合焦状態である前記少なくとも1つのオブジェクト及び前記粒子が焦点外れ状態である前記少なくとも2つのオブジェクトから得られたデータを含むステップと、
− 前記人工知能処理システムを、該人工知能処理システムに第1タイプの粒子類に関連付けられる第1タイプのデータ群及び第2タイプの粒子類に関連付けられる第2タイプのデータ群を有するデータを供給することにより訓練するステップと、
を有する。
・栄養、
・温度、pH、抗生物質等の環境、
・汚染(サンプルは、時間にわたり検出可能なレベルにまで発展する二次集団により汚染される)、
・繁殖(濃度が増加し、副次的影響が進展しつつあり得る、寸法の分布)、
・活動、
・突然変異(当該クラウドにおける粒子特徴の新たな値の出現により、クラウドの形態を変化させ得る)、
・構造的形態/進展(クラスタ形成、試料の異なるライフサイクル、老化、生/死)、
等である。
− 前記試験液体サンプルを供給する(準備する)ステップと、
− 前記液体サンプル中の個々の粒子の少なくとも3つの画像を収集するステップであって、前記粒子が、各々、合焦状態又は焦点外れ状態であるステップと、
− 前記収集された画像により捕捉された前記個々の粒子の副画像(オブジェクト)を作成すると共に、個々の粒子に関するオブジェクトのスタックを供給し、且つ、前記粒子が合焦状態である少なくとも1つのオブジェクト及び前記粒子が焦点外れ状態である少なくとも2つのオブジェクトを含むオブジェクトの完全なスタックを識別するステップと、
− 前記オブジェクトのスタックの各々に対して、少なくともN個の特徴からなる一群の特徴を決定するステップであって、Nが1以上であるステップと、
− 前記人工知能処理システムが、個々の粒子に対する前記決定された一群の特徴に関する前記一群の値を、前記粒子を分類すると共に少なくとも1つの目標粒子が分類されたかを決定するために関連付けることを可能にするステップと、
を有する。
一実施態様において、液体サンプル中の粒子を訓練された粒子分類器システムを用いて分類する当該方法は、
− 前記液体サンプル中の個々の粒子の少なくとも3つの画像を収集するステップであって、前記個々の粒子が合焦状態又は焦点外れ状態であるステップと、
− 前記個々の粒子の副画像(オブジェクト)を作成すると共に、前記オブジェクトの各々を前記個々の粒子の異なる画像を有するオブジェクトのスタックに割り当てて、前記オブジェクトのスタックが、前記粒子が合焦状態である少なくとも1つのオブジェクト及び前記粒子が焦点外れ状態である少なくとも2つのオブジェクトを含むようにするステップと、
− 前記オブジェクトのスタックに関して、少なくともN個の特徴からなる一群の特徴を決定するステップであって、Nが1以上であり、前記一群の特徴の決定が、前記粒子が合焦状態である前記少なくとも1つのオブジェクト及び前記粒子が焦点外れ状態である前記少なくとも2つのオブジェクトから得られたデータを含むステップと、
− 前記個々の粒子を分類するために、前記一群の特徴を訓練された粒子分類器システムの人工知能処理システムに供給するステップと、
− 前記人工知能処理システムが、個々の粒子に対する前記決定された一群の特徴に関する前記一群の値を、前記粒子を分類するために関連付けることを可能にするステップと、
を有する。
・面積、周囲長、取り囲む円の面積等の空間的記述子;
・凸状性、偏心性、形状因子等の形態的記述子;
・二分モーメント(binary moment);
等の、閾処理された合焦状態オブジェクトに基づく特徴を有する。当該特徴は、
・コントラスト、光散乱特性、吸収度等;
・種々のタイプのグレイスケールモーメント;
・焦点を合わされたグレイスケール画像のフーリエパワースペクトルにおいて抽出された特徴;
等の合焦状態のオブジェクトのグレイスケール版に基づく特徴も有することができる。
・FWHM、AUC、当該曲線と平滑化曲線との間の相違等の、当該オブジェクトの種々の焦点曲線の署名(signature)/記述子;
・FWHM、AUC、当該曲線と平滑化曲線との間の相違等の、当該オブジェクトの種々の輝度曲線の署名/記述子;
・当該オブジェクトスタックにおける個々のオブジェクトに対してグレイスケール/二値特徴を適用することにより発生される曲線の署名/記述子;
等の、オブジェクトスタック(即ち、複数の合焦状態及び焦点の外れたオブジェクト)からの情報に基づく特徴を有することができる。
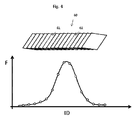
この実施例では、上述した粒子分類器システムを用いてイースト菌を分類する方法を説明する。イースト菌は“死んでいる”又は“生きている”の何れかとして分類される。
未知の寸法又は形状の単一栽培イースト菌のサンプルにおいて、各細胞(菌体)を増殖(spawning)段階に従って分類したい。全ての細胞は増殖段階にあり、細胞は単独であるか(増殖していない)、2つの細胞が繋がっているか(一代目で増殖している)、又は複数のオブジェクトが繋がっている(一層高いレベルの増殖)と仮定する。区分化、スタックの生成及び特徴の計算の後、当該粒子の寸法分布は単一細胞寸法の倍数の付近でピークを示す(即ち、1単位寸法、2単位寸法、等々の付近でピークを示す)。最も低い側のピークが、この時点まで未知であった単一細胞の寸法に対応することは明らかである。かくして、当該集合内の全ての粒子は上記分布における最も近いピークに従って分類することができる。即ち、最も低い側のピークに最も近い粒子は増殖しておらず、2番目のピークに近い粒子は一代目で増殖している細胞として分類される。
Claims (14)
- 液体サンプル中の粒子を分類するためのシステムであって、該システムは、
− 少なくとも1つの画像収集装置、及び光軸を持つ対応するレンズを有し、該画像収集装置が前記光軸に垂直な画像取得領域の画像を収集する光学検出アセンブリと、
− 粒子を含む液状のサンプルを保持するのに適した少なくとも1つのサンプル容器を有するサンプル装置と、
− 前記サンプル容器の少なくとも一部を介して前記画像取得領域を、収集される各画像の間のステップ長で平行移動させる平行移動装置と、
− 複数の画像取得領域の画像を収集するために前記光学検出アセンブリ及び前記平行移動装置を制御するコントローラと、
− 収集された前記画像により捕捉された個々の粒子のオブジェクトを生成すると共に、前記オブジェクトの各々を前記個々の粒子の異なる画像を有する対応するオブジェクトのスタックに割り当てることによって、前記収集された画像を分析し、前記個々の粒子に対して一群の特徴を決定するようプログラムされた画像プロセッサと、
− 前記個々の粒子に対する前記一群の特徴を、粒子についての粒子分類に関連付けるようプログラムされた人工知能プロセッサと、
を有し、
− 前記画像収集装置が、前記個々の粒子の少なくとも3つの画像を収集し、前記個々の粒子は合焦状態又は焦点外れ状態であり、
− 前記画像プロセッサが、収集された前記少なくとも3つの画像によって捕捉された前記個々の粒子のオブジェクトを生成し、前記オブジェクトのスタックは、前記個々の粒子が合焦状態である少なくとも1つのオブジェクト及び前記個々の粒子が焦点外れ状態である2つのオブジェクトを含むようにされる、
システム。 - 訓練モード及び分類モードを含む2つの動作モードを有する、請求項1に記載のシステム。
- − 前記画像プロセッサが更に、少なくともN個の特徴の前記一群の特徴に関する一群の値を決定し、Nが1以上であり、前記一群の特徴の前記一群の値の決定は、前記個々の粒子が合焦状態である前記少なくとも1つのオブジェクト及び/又は前記個々の粒子が焦点外れ状態である少なくとも前記2つのオブジェクトから得られたデータを含む、請求項1に記載のシステム。
- 前記平行移動装置が、前記サンプル装置及び前記光学検出アセンブリを相対的に移動させる、請求項1に記載のシステム。
- サンプル容器内に保持されるサンプル中の個々の粒子のオブジェクトを生成する方法であって、該方法は、
− 画像収集装置及び対応するレンズによって前記サンプル容器内に形成された前記レンズの光軸に垂直な画像取得領域を、前記サンプル容器内の複数の位置に平行移動させるステップと、
− 前記サンプル容器内の前記複数の位置において前記画像取得領域の画像を収集するステップと、
− 収集された前記画像により捕捉された前記サンプル中の個々の粒子のオブジェクトを生成するステップによって、前記個々の粒子に対して一群の特徴を決定するステップと、
を有し、前記個々の粒子のオブジェクトを生成するステップは、
− 前記個々の粒子を取り囲むオブジェクト外周線内の全ピクセルをコピーするステップと、
− コピーされた前記ピクセルに、形状フィルタ、寸法フィルタ、コントラストフィルタ又は輝度フィルタを含む少なくとも1つのフィルタにおいてフィルタ処理を施すステップと、を有し、
前記個々の粒子のオブジェクトを生成するステップは、更に、
− 収集された前記少なくとも3つの画像によって捕捉された前記個々の粒子のオブジェクトを生成し、前記個々の粒子が合焦状態である少なくとも1つのオブジェクト及び前記個々の粒子が焦点外れ状態である2つのオブジェクトを含むように前記オブジェクトのスタックを生成するステップ、
を有する、方法。 - 前記個々の粒子を取り囲む前記オブジェクト外周線が多角形又は円の形状である、請求項5に記載の方法。
- 前記画像プロセッサが、オブジェクトの完全なスタックを識別するようプログラムされ、前記オブジェクトの完全なスタックは、(i)少なくとも5つのオブジェクト、(ii)少なくとも9つのオブジェクト、(iii)少なくとも15のオブジェクト、(iv)少なくとも25のオブジェクト、及び(v)少なくとも49のオブジェクトの少なくとも1つを有する、請求項1に記載のシステム。
- 前記画像プロセッサが、焦点が外れたオブジェクトに関する特徴、焦点が合ったオブジェクトのグレイスケール版に関する特徴、焦点が合ったオブジェクトの閾処理版に関する特徴、並びに焦点が合ったオブジェクト及び焦点が外れたオブジェクトの両方に関係する特徴、の少なくとも1つを含む一群の特徴に関する値を決定するようにプログラムされる、請求項1に記載のシステム。
- 前記粒子についての粒子分類が、細菌、古細菌、イースト、菌類、花粉、ウイルス、顆粒球、白血球、単球、赤血球、血小板、卵母細胞、精子、接合子、幹細胞、体細胞、結晶、脂肪滴、及びこれらの混合物からなる群から選択される、請求項1に記載のシステム。
- 前記少なくとも1つの画像収集装置が画像の群を順次収集し、前記人工知能プロセッサが第1群の画像により捕捉された粒子及び少なくとも第2群の画像により捕捉された粒子を分類し、且つ、前記第1群の画像からオブジェクトのスタックの第1集合を生成すると共に前記第2群の画像からオブジェクトのスタックの第2集合を生成する、請求項1に記載のシステム。
- 前記第1集合の個々の粒子のオブジェクトのスタック及び前記第2集合の個々の粒子のオブジェクトのスタックを識別すると共に、前記第1集合の前記オブジェクトのスタックと前記第2集合の個々の粒子のオブジェクトのスタックとの間の変化を検出する、請求項10に記載のシステム。
- 前記画像プロセッサが分類されていない粒子に対して一群の特徴に関する値を決定すると共に特徴の群の集合を作成し、前記分類されていない粒子が前記特徴の群の集合を用いて分類される、請求項1に記載のシステム。
- サンプル容器内に保持される試験液体サンプルを目標粒子の存在に関して分析する方法であって、
− 前記試験液体サンプルを供給するステップと、
− 画像収集装置及び対応するレンズによって前記サンプル容器内に形成される画像取得領域を、前記サンプル容器内の複数の位置に平行移動させるステップと、
− 前記サンプル容器内の前記複数の位置において、前記試験液体サンプル中の個々の粒子の少なくとも3つの画像をそれぞれ収集するステップであって、前記個々の粒子がそれぞれ、合焦状態又は焦点外れ状態であるステップと、
− 収集された前記画像により捕捉された前記個々の粒子のオブジェクトをそれぞれ生成すると共に、個々の粒子の各々に関するオブジェクトのスタックを供給するステップと、
− オブジェクトの完全なスタックを識別するステップであって、識別された前記オブジェクトの完全なスタックの各々は、対応する前記個々の粒子が合焦状態であるオブジェクト及び対応する前記個々の粒子が焦点外れ状態である2つのオブジェクトを少なくとも含むステップと、
− 前記識別されたオブジェクトの完全なスタックの各々に対して、少なくともN個の特徴の一群の特徴を決定するステップであって、Nが1以上であるステップと、
− 個々の粒子の各々に対する決定された前記一群の特徴に関する前記一群の値を、前記個々の粒子を分類すると共に前記個々の粒子の中から少なくとも1つの目標粒子が分類されたかを決定するように関連付けるステップと、
を有する、方法。 - 前記試験液体サンプル中の前記目標粒子の数を決定するために定量的な分析を実行するステップを更に有する、請求項13に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261739323P | 2012-12-19 | 2012-12-19 | |
| DKPA201270800 | 2012-12-19 | ||
| US61/739,323 | 2012-12-19 | ||
| DKPA201270800 | 2012-12-19 | ||
| PCT/DK2013/050445 WO2014094790A1 (en) | 2012-12-19 | 2013-12-19 | System and method for classification of particles in a fluid sample |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016505836A JP2016505836A (ja) | 2016-02-25 |
| JP2016505836A5 JP2016505836A5 (ja) | 2018-02-01 |
| JP6479676B2 true JP6479676B2 (ja) | 2019-03-06 |
Family
ID=50977616
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015548214A Active JP6479676B2 (ja) | 2012-12-19 | 2013-12-19 | 流体サンプル中の粒子の分類のためのシステム及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US9904842B2 (ja) |
| EP (1) | EP2936116B8 (ja) |
| JP (1) | JP6479676B2 (ja) |
| CN (1) | CN105378453B (ja) |
| WO (1) | WO2014094790A1 (ja) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3001177A1 (de) | 2014-09-29 | 2016-03-30 | Grundfos Holding A/S | Vorrichtung zum Erfassen von Partikeln in einer Flüssigkeit |
| CN106796169B (zh) * | 2014-10-01 | 2021-01-15 | 水光科技私人有限公司 | 探测流体中颗粒的传感器 |
| EP3037803A1 (de) | 2014-12-22 | 2016-06-29 | Grundfos Holding A/S | Vorrichtung zur durchstrahlenden Untersuchung einer Flüssigkeit |
| EP3037804A1 (de) | 2014-12-22 | 2016-06-29 | Grundfos Holding A/S | Verfahren zum quantitativen und qualitativen Erfassen von Partikeln in Flüssigkeit |
| EP3040705A1 (de) * | 2014-12-30 | 2016-07-06 | Grundfos Holding A/S | Verfahren zum Bestimmen von Partikeln |
| US11627729B2 (en) | 2015-05-21 | 2023-04-18 | Atlantic Sapphire Ip, Llc | Transfer assembly and system for aquaculture |
| JP2017009314A (ja) * | 2015-06-17 | 2017-01-12 | 株式会社Screenホールディングス | 教示データの作成支援方法、作成支援装置、プログラムおよびプログラム記録媒体 |
| WO2017130613A1 (ja) | 2016-01-27 | 2017-08-03 | 株式会社 日立ハイテクノロジーズ | 観察装置 |
| DE102016212164B3 (de) * | 2016-07-04 | 2017-09-21 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren zur Bestimmung der mittleren Partikelgröße von Partikeln, die in einem flüssigen und fließenden Medium suspendiert sind, über dynamische Lichtstreuung und Vorrichtung hierzu |
| JP6800223B2 (ja) | 2016-10-28 | 2020-12-16 | ベックマン コールター, インコーポレイテッド | 物質調製評価システム |
| CN106599902B (zh) * | 2016-11-04 | 2019-09-24 | 浙江大学 | 一种基于图像的糖晶体分类识别及结晶质量控制方法 |
| US11073472B2 (en) * | 2016-11-14 | 2021-07-27 | Siemens Healthcare Diagnostics Inc. | Methods and apparatus for characterizing a specimen using pattern illumination |
| EP3610269B1 (en) | 2017-04-13 | 2024-11-20 | Siemens Healthcare Diagnostics Inc. | Methods and apparatus for determining label count during specimen characterization |
| US10408852B2 (en) | 2017-04-26 | 2019-09-10 | Lawrence Livermore National Security, Llc | Automated control of microfluidic devices based on machine learning |
| WO2018207524A1 (ja) * | 2017-05-07 | 2018-11-15 | 国立大学法人大阪大学 | 識別方法、分類分析方法、識別装置、分類分析装置および記憶媒体 |
| EP3659065A4 (en) * | 2017-07-28 | 2020-08-19 | Siemens Healthcare Diagnostics Inc. | DEEP LEARNING VOLUME QUANTIFICATION METHODS AND APPARATUS |
| DE102017009804A1 (de) * | 2017-10-20 | 2019-04-25 | Vermicon Ag | Verfahren zur Bewertung von mikroskopischen Proben und Vorrichtung zur Ausführung dieses Verfahrens |
| CN108593643A (zh) * | 2018-03-13 | 2018-09-28 | 重庆交通大学 | 基于智能移动终端的尿液检测方法 |
| CN112136035B (zh) * | 2018-04-26 | 2024-06-21 | 贝克顿·迪金森公司 | 用于颗粒分选仪的双指数变换 |
| CN108710852B (zh) * | 2018-05-21 | 2021-08-03 | 山东大学 | 一种限定拍摄深度的粒度分布图像识别方法及系统 |
| LU100870B1 (de) * | 2018-07-09 | 2020-01-09 | Cytena Gmbh | Verfahren zum Untersuchen einer flüssigen Probe |
| AU2019314196A1 (en) | 2018-07-31 | 2021-01-07 | Amgen Inc. | Robotic system for performing pattern recognition-based inspection of pharmaceutical containers |
| WO2020050687A1 (ko) * | 2018-09-07 | 2020-03-12 | 주식회사 더웨이브톡 | 미생물 정보 제공 장치 및 방법 |
| JP7253273B2 (ja) * | 2018-09-21 | 2023-04-06 | 公立大学法人横浜市立大学 | 生殖医療支援システム |
| CN111104894B (zh) * | 2019-12-17 | 2021-01-12 | 推想医疗科技股份有限公司 | 一种精子标注方法、装置、电子设备及存储介质 |
| US11425895B2 (en) | 2020-03-05 | 2022-08-30 | Atlantic Sapphire Ip, Llc | Method for optimization of filtration in an aquaculture system |
| DE102020107965B3 (de) * | 2020-03-23 | 2021-09-09 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Verfahren zur optischen Bestimmung einer Intensitätsverteilung |
| CN112287563B (zh) * | 2020-11-18 | 2022-08-16 | 华能澜沧江水电股份有限公司 | 探测单分散颗粒体系结晶相前驱体微观结构的方法及系统 |
| WO2022136603A1 (en) * | 2020-12-22 | 2022-06-30 | Radiometer Medical Aps | Blood analyser with out-of-focus image plane analysis and related methods |
| EP4268185A1 (en) | 2020-12-22 | 2023-11-01 | Radiometer Medical ApS | Blood analyser with image plane analysis and related methods |
| US12114644B2 (en) * | 2021-02-26 | 2024-10-15 | Atlantic Sapphire Ip, Llc | Feed consumption monitoring system |
| DE102021123506A1 (de) * | 2021-09-10 | 2023-03-16 | Axel Wilde | Verfahren zur Analyse von Partikeln in Fluid-Gemischen und Gas-Gemischen |
| CN113947575B (zh) * | 2021-10-12 | 2024-07-02 | 北京工业大学 | 一种花粉颗粒检测方法及装置 |
| CN114112819B (zh) * | 2022-01-25 | 2022-05-10 | 北矿智云科技(北京)有限公司 | 一种测量磨矿粒度的方法及装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4965725B1 (en) | 1988-04-08 | 1996-05-07 | Neuromedical Systems Inc | Neural network based automated cytological specimen classification system and method |
| DE69429145T2 (de) | 1993-08-19 | 2002-07-18 | Hitachi, Ltd. | Klassifikation und Prüfvorrichtung für Teilchen in einer Flüssigkeit |
| JPH08320285A (ja) * | 1995-05-25 | 1996-12-03 | Hitachi Ltd | 粒子分析装置 |
| JP2891159B2 (ja) * | 1996-02-14 | 1999-05-17 | 日本電気株式会社 | 多眼画像からの物体検出方式 |
| DE19616997A1 (de) * | 1996-04-27 | 1997-10-30 | Boehringer Mannheim Gmbh | Verfahren zur automatisierten mikroskopunterstützten Untersuchung von Gewebeproben oder Körperflüssigkeitsproben |
| KR100303608B1 (ko) | 1997-05-22 | 2001-11-22 | 박호군 | 혈구세포자동인식방법및장치 |
| US6996549B2 (en) * | 1998-05-01 | 2006-02-07 | Health Discovery Corporation | Computer-aided image analysis |
| EP1301894B1 (en) * | 2000-04-24 | 2009-06-24 | International Remote Imaging Systems, Inc. | Multi-neural net imaging apparatus and method |
| US6583865B2 (en) * | 2000-08-25 | 2003-06-24 | Amnis Corporation | Alternative detector configuration and mode of operation of a time delay integration particle analyzer |
| EP1504247A1 (en) | 2002-05-14 | 2005-02-09 | Amersham Biosciences Niagara Inc. | System and methods for rapid and automated screening of cells |
| WO2006055413A2 (en) | 2004-11-11 | 2006-05-26 | The Trustees Of Columbia University In The City Of New York | Methods and systems for identifying and localizing objects based on features of the objects that are mapped to a vector |
| BRPI0501535B8 (pt) * | 2005-04-26 | 2021-07-27 | Mario Augusto Pazoti | método de identificação do guignardia citricarpa |
| US20090295963A1 (en) | 2006-02-10 | 2009-12-03 | Pascal Bamford | Method and apparatus and computer program product for collecting digital image data from microscope media-based specimens |
| SE530750C2 (sv) * | 2006-07-19 | 2008-09-02 | Hemocue Ab | En mätapparat, en metod och ett datorprogram |
| US8753026B2 (en) | 2007-06-29 | 2014-06-17 | R.R. Donnelley & Sons Company | Use of a sense mark to control a printing system |
| JP5068121B2 (ja) | 2007-08-27 | 2012-11-07 | 株式会社ミツトヨ | 顕微鏡および三次元情報取得方法 |
| SE532499C2 (sv) | 2008-01-18 | 2010-02-09 | Hemocue Ab | Metod och apparat för analys av partiklar i ett vätskeformigt prov |
| DK200801722A (en) | 2008-12-05 | 2010-06-06 | Unisensor As | Optical sectioning of a sample and detection of particles in a sample |
| GB0909461D0 (en) | 2009-06-02 | 2009-07-15 | Ge Healthcare Uk Ltd | Image analysis |
| US9001200B2 (en) * | 2010-01-12 | 2015-04-07 | Bio-Rad Laboratories, Inc. | Cell characterization using multiple focus planes |
-
2013
- 2013-12-19 JP JP2015548214A patent/JP6479676B2/ja active Active
- 2013-12-19 EP EP13865548.5A patent/EP2936116B8/en active Active
- 2013-12-19 US US14/654,347 patent/US9904842B2/en active Active
- 2013-12-19 WO PCT/DK2013/050445 patent/WO2014094790A1/en active Application Filing
- 2013-12-19 CN CN201380067242.6A patent/CN105378453B/zh active Active
-
2018
- 2018-02-02 US US15/886,925 patent/US10192100B2/en active Active
- 2018-12-24 US US16/231,650 patent/US10430640B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2936116B1 (en) | 2020-02-12 |
| US10192100B2 (en) | 2019-01-29 |
| US20150347817A1 (en) | 2015-12-03 |
| US20180157894A1 (en) | 2018-06-07 |
| EP2936116B8 (en) | 2020-04-01 |
| EP2936116A4 (en) | 2016-08-17 |
| US9904842B2 (en) | 2018-02-27 |
| CN105378453A (zh) | 2016-03-02 |
| EP2936116A1 (en) | 2015-10-28 |
| CN105378453B (zh) | 2018-09-25 |
| US10430640B2 (en) | 2019-10-01 |
| US20190130162A1 (en) | 2019-05-02 |
| JP2016505836A (ja) | 2016-02-25 |
| WO2014094790A1 (en) | 2014-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6479676B2 (ja) | 流体サンプル中の粒子の分類のためのシステム及び方法 | |
| JP7261414B2 (ja) | 分析方法 | |
| US10083342B2 (en) | Imaging blood cells | |
| JP5707399B2 (ja) | 微生物検出方法、微生物検出装置及びプログラム | |
| CN105143850B (zh) | 用于血液样品中的粒子分析的自聚焦系统和方法 | |
| WO2017082048A1 (ja) | 分類器構成方法およびこれを用いた細胞の生死判定方法 | |
| JP2016505836A5 (ja) | ||
| US20220383629A1 (en) | Label-free cell classification and screening system based on hybrid transfer learning | |
| JP2020514704A (ja) | レンズレス撮像によるサンプル内の粒子の計数方法 | |
| CA3160692A1 (en) | Off-focus microscopic images of a sample | |
| CN111652095A (zh) | 一种基于人工智能的ctc图像识别方法和系统 | |
| CN117576103A (zh) | 集成电控显微镜和深度学习算法的尿沉渣镜检分析系统 | |
| JP2012039929A (ja) | 受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法 | |
| Allen et al. | Machine vision for automated optical recognition and classification of pollen grains or other singulated microscopic objects | |
| JP2025502722A (ja) | 光設定に基づく細胞分類による生体液分析器 | |
| WO2022230672A1 (ja) | 細胞生死判定方法、細胞生死判定装置及び細胞生死判定システム | |
| CN103969169B (zh) | 对样本进行检测检测方法和装置 | |
| WO2023059764A1 (en) | Method and apparatus for searching and analyzing cell images | |
| WO2022230673A1 (ja) | 細胞培養装置及び生細胞濃度調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171212 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20171212 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20171220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180704 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6479676 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |