JP6469678B2 - 画像アーティファクトを補正するシステム及び方法 - Google Patents
画像アーティファクトを補正するシステム及び方法 Download PDFInfo
- Publication number
- JP6469678B2 JP6469678B2 JP2016529816A JP2016529816A JP6469678B2 JP 6469678 B2 JP6469678 B2 JP 6469678B2 JP 2016529816 A JP2016529816 A JP 2016529816A JP 2016529816 A JP2016529816 A JP 2016529816A JP 6469678 B2 JP6469678 B2 JP 6469678B2
- Authority
- JP
- Japan
- Prior art keywords
- color
- correction
- value
- image
- chroma
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 96
- 238000012937 correction Methods 0.000 claims description 270
- 238000001514 detection method Methods 0.000 claims description 88
- 230000004075 alteration Effects 0.000 claims description 47
- 241000023320 Luma <angiosperm> Species 0.000 claims description 36
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 claims description 36
- 238000012795 verification Methods 0.000 claims description 16
- 238000004458 analytical method Methods 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 6
- 238000005070 sampling Methods 0.000 claims description 4
- 230000015654 memory Effects 0.000 description 32
- 238000001914 filtration Methods 0.000 description 30
- 230000008569 process Effects 0.000 description 25
- 230000003044 adaptive effect Effects 0.000 description 21
- 238000004891 communication Methods 0.000 description 21
- 238000003384 imaging method Methods 0.000 description 18
- 238000012545 processing Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 230000003936 working memory Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 229920006395 saturated elastomer Polymers 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 4
- 238000010200 validation analysis Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 238000003708 edge detection Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000010339 dilation Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052754 neon Inorganic materials 0.000 description 1
- GKAOGPIIYCISHV-UHFFFAOYSA-N neon atom Chemical compound [Ne] GKAOGPIIYCISHV-UHFFFAOYSA-N 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images









Classifications
-
- G06T5/77—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/46—Colour picture communication systems
- H04N1/56—Processing of colour picture signals
- H04N1/58—Edge or detail enhancement; Noise or error suppression, e.g. colour misregistration correction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
Description
[0023]本開示の実施形態は、色収差及び/又はカラースポットアーティファクトの補正に関する技法を含む。例えば、色収差とカラースポットアーティファクトとの両方は、本明細書では多重仮説カラーアーティファクト補正(MHCAC:Multiple Hypothesis Color Artifact Correction)と呼ぶ、クロマチャネル(YCbCr)に対して方向性メディアンフィルタ処理を実装する後処理方法を使用して補正され得る。既存の方法と比較して、MHCAC技法は、画像中の不要なカラーアーティファクトの除去と画像の正当な色特徴を維持することとのバランスをとるために、カラーアーティファクト検出精度の要件を緩和し、カラーアーティファクト補正の効率と耐性とを大幅に改善する。
[0028]図1に、適応型カラーアーティファクト補正システム100の一実施形態の概略ブロック図を示す。カラーアーティファクト補正システム100は、検出モジュール120と、検出モジュール120とデータ通信しているダウンスケールモジュール130、160とを含む。適応型カラーアーティファクト補正システム100はまた、補正のための収差を含み得る画像の画素及び/又は部分を含み得る出力を受信するために、検出モジュール120とデータ通信しているCb補正モジュール140とCr補正モジュール170とを含む。それぞれ、ダウンスケールされたCr画像データとCr画像データとを受信するために、Cb補正モジュール140はまた、ダウンスケールモジュール130とデータ通信しており、Cr補正モジュール170は、ダウンスケールモジュール160とデータ通信している。Cb補正モジュール140は検証モジュール145とデータ通信しており、検証モジュール145はアップスケールモジュール150とデータ通信している。アップスケールモジュール150は、アップスケールされたCbデータの出力を与えるように構成される。同様に、Cr補正モジュール170は検証モジュール175とデータ通信しており、検証モジュール175はアップスケールモジュール180とデータ通信している。アップスケールモジュール180は、アップスケールされたCrデータの出力を与えるように構成される。適応型カラーアーティファクト補正システム100とそれの構成要素とについて、以下で更に説明する。
[0036]図2に、適応型カラーアーティファクト補正能力をもつ例示的なシステム200の概略ブロック図を示す。システム200は、画像センサー215にリンクされたプロセッサ220を含む構成要素のセットを有する。作業メモリ205、記憶装置(又は「データストア」)210、電子表示器225、及びメモリ230もプロセッサ220と通信している。
[0053]図3Aに、画像のルーマ成分中のカラーアーティファクトを検出するためのカラーアーティファクト検出カーネル305、310、315の複数の実施形態を示し、図3Bに、図3Aのカーネル305、310、315を実装することができる補正マップ回路300の一実施形態を示す。入力画像データで、又は画像データのY成分で図示の対称カーネル305、310、315を畳み込むと、画像データ中のカラーアーティファクトの位置又は潜在的な位置を示すカラーアーティファクトマップを与えることができる。入力画像データでカーネル305を適用すると、2×2画素からなるブロックごとの単一の「スーパー画素」値を決定することによるダウンサンプリングを実行することができる。スーパー画素値は、例えば、2×2ブロック中の画素の各々の値の集計又は平均であり得る。出力ブロックは、図示の例では、元のサイズの1/4になり得る。画像データでカーネル310を畳み込むと、スーパー画素値が画素の局所近傍よりも明るいかどうかに関する指示を与えることができ、画像データでカーネル315を畳み込むと、スーパー画素値が画素の遠方よりも明るいかどうかに関する指示を与えることができる。

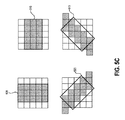
[0063]図5Aに、方向性メディアンフィルタ505、510、515、520の一実施形態を示す。図5Bに、図5Aのフィルタ505、510、515、520を実装することができる適応型カラーアーティファクト補正回路500の一実施形態を示す。図示のように、フィルタは、垂直5×3メディアンフィルタ505と、水平5×3メディアンフィルタ510と、垂直フィルタ505から約45度でオフセットされた第1の対角5×3メディアンフィルタ515と、第1の対角フィルタ515に対して直角である第2の対角5×3メディアンフィルタ520とを含む。図5Aの4つの5×3方向性メディアンフィルタ505、510、515、520は、MHCAC技法の一実施形態を示し、他の実施形態では、他の次元及び方向のメディアンフィルタが使用され得る。図5Cに、図5Aの方向性メディアンフィルタの適用例によって5×5ブロック中で影響を及ぼされ得る例示的な画素を示す。対角メディアンフィルタ515及び520の適用例では、5×5ブロック境界の外側の画素からの値が使用され得る。一実施形態では、最も近い境界の画素が、畳み込みのための値を与えるのに必要な範囲まで拡張され得る。別の実施形態では、ブロックエッジを越えたところからの値を必要とすることになる出力中央値中のあらゆる画素がスキップされ得る。他の例では他のエッジ処理技法が使用され得る。
[0068]図6に、適応型カラーアーティファクト補正プロセス600の一実施形態を示す。図1、図2、図3B、図4B、及び図5Bのシステム及び構成要素のコンテキストで説明するが、プロセス600は、適応型色補正能力を有するいかなるシステム上にも実装され得る。
[0083]本明細書で開示される実装形態は、1つ又は複数の画像センサーを有する電子機器を用いて色補正された画像を生成するためのシステム、方法及び装置を提供する。これらの実施形態は、ハードウェア、ソフトウェア、ファームウェア、又はそれらの任意の組合せで実装され得ることを当業者は認識されよう。
以下に本願の出願当初の特許請求の範囲に記載された発明を付記する。
[C1]
複数の画素を有する画像中のカラーアーティファクトを補正するための方法であって、
前記画像の画像データを受信することと、前記画像データが、前記画像中の前記複数の画素の各々についてのルーマ(Y)成分値と2つのクロマ成分値とを含む、
前記画像データの前記Y成分値中の少なくとも1つのカラーアーティファクトを検出することと、
前記画像中の前記複数の画素に対応する補正比率マップを生成することと、前記補正比率マップが、前記画像データ中の前記少なくとも1つのカラーアーティファクトの位置を示す、
前記クロマ成分値のサブセットの複数の中央値を生成するために、各クロマ成分に複数の方向性メディアンフィルタを適用することと、
クロマ成分値の前記サブセットの各々について、対応する補正比率マップエントリに少なくとも部分的に基づいて前記複数の中央値のうちの1つを選択することと、
前記複数の中央値のうちの前記選択された1つに少なくとも部分的に基づいて前記画素の補正済みクロマ値を出力することと
を備える方法。
[C2]
補正モジュールにおいて前記中央値と第1の補正比率マップエントリを受信すること、前記第1の補正比率マップエントリが前記画素に対応する、を更に備える、C1に記載の方法。
[C3]
前記画像データのCb成分とCr成分とのうちの少なくとも1つの分析に基づいて前記補正比率マップを更新すること、ここにおいて、前記補正比率マップを更新することが、非カラー画素に関連する第2の補正比率マップエントリ値を変更することによって後続のクロマ補正から前記非カラー画素を除外する、を更に備える、C1に記載の方法。
[C4]
クロマ成分の一方又は両方に対して実行されるグレーチェック結果に応答して前記補正比率マップを更新することを更に備える、C1に記載の方法。
[C5]
前記画素がカラースポットアーティファクトに関連付けられることを前記第1の補正比率マップエントリが示す場合、前記複数の中央値のうちの1つを選択することが最も保守的な中央値を選択することを備える、C1に記載の方法。
[C6]
前記補正済みクロマ値を出力することが、入力クロマ値を用いて前記最も保守的な中央値を重み付けすることを更に備える、C5に記載の方法。
[C7]
前記画素が色収差に関連付けられることを前記第1の補正比率マップエントリが示す場合、前記複数の中央値のうちの1つを選択することが最も積極的な中央値を選択することを備える、C1に記載の方法。
[C8]
画像中のカラーアーティファクトを補正するためのシステムであって、
複数の画素を備える画像中の少なくとも1つのカラーアーティファクトを検出するように構成された検出モジュールと、前記検出モジュールが、前記画像中の複数の画素の各々についてのエントリを有する補正比率マップを生成するように更に構成され、前記エントリが、対応する画素に関連するカラーアーティファクトのタイプを示し、
前記エントリに少なくとも部分的に基づいて前記対応する画素の補正済みクロマ値を計算する構成された補正モジュールと、前記エントリが、前記対応する画素に関連するカラーアーティファクトのタイプを示し、前記補正モジュールが、補正済みクロマ値を計算するために使用すべき前記エントリに基づいて複数の方向性メディアンフィルタのうちの1つを選択するように更に構成され、前記補正モジュールは、前記対応する画素がカラースポットアーティファクトに関連付けられることを前記エントリが示す場合、第1の方向性メディアンフィルタを選択することと、前記対応する画素が色収差に関連付けられることを前記エントリが示す場合、第2の方向性メディアンフィルタを選択することとを行うように更に構成され、
前記補正済みクロマ値から形成される補正済み画像中で追加のアーティファクトの導入又は正当な色特徴の非飽和化を低減するために前記補正済みクロマ値を検証するように構成された検証モジュールと
を備える、システム。
[C9]
前記複数の方向性メディアンフィルタが、垂直5×3メディアンフィルタと、水平5×3メディアンフィルタと、2つの対角5×3メディアンフィルタとを備え、ここにおいて、前記対角5×3メディアンフィルタが互いに直角である、C8に記載のシステム。
[C10]
前記補正比率マップエントリは、前記対応する画素がカラーアーティファクトに関連付けられないのか、カラースポットアーティファクトに関連付けられるのか、又は色収差に関連付けられるのかを示す、C8に記載のシステム。
[C11]
前記検出モジュールが、撮影済み画像のルーマ成分の分析に少なくとも部分的に基づいて、予備補正比率マップエントリ値を生成するように構成された補正マップ回路を備える、C8に記載のシステム。
[C12]
前記補正マップ回路が、カラースポットアーティファクトを検出するための複数のカーネルで前記ルーマ成分を畳み込むための複数のモジュールを備える、C11に記載のシステム。
[C13]
前記補正マップ回路が、前記ルーマ成分の飽和マップを構築するためのモジュールを備える、C11に記載のシステム。
[C14]
前記検出モジュールが、前記撮影済み画像のクロマ成分の一方又は両方の分析に少なくとも部分的に基づいて、前記予備補正比率マップエントリ値を更新するように構成された補正マップ更新回路を更に備える、C11に記載のシステム。
[C15]
前記補正マップ更新回路が、前記複数の画素の各々が非カラー画素であるかどうかを決定するように構成されたグレーチェックモジュールを備える、C14に記載のシステム。
[C16]
前記補正マップ更新回路が、カラースポットアーティファクトを検出するためのカーネルでクロマ成分の前記一方又は両方を畳み込むための複数のモジュールを備える、C14に記載のシステム。
[C17]
前記補正マップ更新回路が、グレーチェック結果とカラースポットチェック結果とに少なくとも部分的に基づいて前記補正比率マップエントリを更新するように構成されたモジュールを備え、ここにおいて、前記グレーチェックと前記カラースポットチェックとがクロマ成分の前記一方又は両方に対して実行される、C14に記載のシステム。
[C18]
前記補正モジュールが、複数の中央値を生成するために、前記対応する画素の入力クロマ値に前記複数の方向性メディアンフィルタを適用するための複数のフィルタモジュールを含む、C8に記載のシステム。
[C19]
前記補正モジュールが、前記補正比率マップエントリと前記複数の中央値とを受信することと、前記対応する画素の補正済みクロマ値を出力することとを行うように構成された適応型選択モジュールを更に備える、C18に記載のシステム
[C20]
前記画像を記憶するように構成されたメモリと、
前記メモリに結合されたプロセッサと、前記プロセッサが、前記画像を取り出し、前記検出モジュールと、前記補正モジュールと、前記検証モジュールとを使用して前記画像を処理するように構成される、
を更に備える、C8に記載のシステム。
[C21]
画像中のカラーアーティファクトを補正するための補正比率マップを生成するための方法であって、
前記画像を備える画像データを受信することと、前記画像が、ルーマ成分と2つのクロマ成分とを備え、
カラーアーティファクトマップを生成するために少なくとも1つの対称カーネルで前記ルーマ成分を畳み込むことと、
前記カラーアーティファクトマップに少なくとも部分的に基づいて予備補正比率マップを生成することと、ここにおいて、前記予備補正比率マップが、前記画像の複数の画素の各々に対応するエントリを含み、
前記クロマ成分のうちの少なくとも1つに対してグレーチェックを実行することと、
後続の色補正からあらゆる非カラー画素を除外するために前記グレーチェックに少なくとも部分的に基づいて前記予備補正比率マップを更新し、それによって最終補正比率マップを生成することと
を備える方法。
[C22]
前記ルーマ成分に基づいて推定飽和マップを生成すること、ここにおいて、前記予備補正比率マップを生成することが、前記推定飽和マップに更に少なくとも部分的に基づく、を更に備える、C21に記載の方法。
[C23]
前記グレーチェックを実行することが、飽和検出カーネルで前記クロマ成分のうちの少なくとも1つを畳み込むことを備える、C21に記載の方法。
[C24]
少なくとも1つの対称カーネルで前記ルーマ成分を畳み込むことが、前記ルーマ成分をダウンサンプリングすることを更に備える、C21に記載の方法。
[C25]
前記クロマ成分のうちの少なくとも1つに対してカラースポットチェックを実行することと、
前記カラースポットチェックに少なくとも部分的に基づいて前記予備補正比率マップを更新することと
を更に備える、C21に記載の方法。
[C26]
実行されたとき、少なくとも1つのプロセッサに、
画像の画像データを受信することと、前記画像データが、前記画像中の複数の画素の各々についてのルーマ(Y)成分値と2つのクロマ成分値とを含む、
前記画像データのルーマ成分値とクロマ成分値との両方に基づいて少なくとも1つのカラーアーティファクトを検出することと、
前記画像中の前記複数の画素に対応する補正比率マップを生成することと、前記補正比率マップが、前記画像データ中の前記少なくとも1つのカラーアーティファクトの位置を示す、
前記クロマ成分値のサブセットの複数の中央値を生成するために、各クロマ成分に複数の方向性メディアンフィルタを適用することと、
クロマ成分値の前記サブセットの各々について、対応する補正比率マップエントリに少なくとも部分的に基づいて前記複数の中央値のうちの1つを選択することと、
前記複数の中央値のうちの前記選択された1つに少なくとも部分的に基づいて前記画素の補正済みクロマ値を出力することと
を備える方法を実行することを行わせる命令を記憶する非一時的コンピュータ可読媒体。
[C27]
前記方法が、クロマ成分の一方又は両方に対して実行されるグレーチェック結果に応答して前記補正比率マップを更新することを更に備えることを更に備える、C26に記載の非一時的コンピュータ可読媒体。
[C28]
前記方法が、クロマ成分の一方又は両方に対して実行されるカラースポットチェック結果に応答して前記補正比率マップを更新することを更に備えることを更に備える、C26に記載の非一時的コンピュータ可読媒体。
[C29]
前記画素がカラースポットアーティファクトに関連付けられることを前記第1の補正比率マップエントリが示す場合、前記複数の中央値のうちの1つを選択することが最も保守的な中央値を選択することを備える、C26に記載の非一時的コンピュータ可読媒体。
[C30]
前記画素が色収差に関連付けられることを前記第1の補正比率マップエントリが示す場合、前記複数の中央値のうちの1つを選択することが最も積極的な中央値を選択することを備える、C26に記載の非一時的コンピュータ可読媒体。
Claims (15)
- 複数の画素を有する画像中のカラーアーティファクトを補正するための方法であって、
前記画像の画像データを受信することと、前記画像データが、前記画像中の前記複数の画素の各々についてのルーマ成分値と2つのクロマ成分値とを含む、
前記画像データの前記ルーマ成分値中の少なくとも1つのカラーアーティファクトを検出することと、
前記画像中の前記複数の画素の各々についてのエントリを有する補正比率マップを生成することと、前記エントリが、対応する画素と関連するカラーアーティファクトの位置を示す、
前記クロマ成分値のサブセットの複数の中央値を生成するために、各クロマ成分に複数の方向性メディアンフィルタを適用することと、
前記クロマ成分値の前記サブセットの各々について、前記補正比率マップの対応するエントリに少なくとも部分的に基づいて前記複数の中央値のうちの1つを選択することと、
前記複数の中央値のうちの前記選択された1つに少なくとも部分的に基づいて前記画素の補正済みクロマ値を出力することと
を備える方法。 - 前記補正比率マップは入力値に対応する複数のエントリを有し、補正モジュールが、前記中央値と前記エントリの第1のエントリを受信すること、前記第1のエントリが前記画素に対応する、を更に備える、請求項1に記載の方法。
- 前記画像データのCb成分とCr成分とのうちの少なくとも1つの分析に基づいて前記補正比率マップを更新すること、ここにおいて、前記補正比率マップが入力値に対応する複数のエントリを有し、前記補正比率マップを更新することが、前記エントリの第2のエントリを変更することによって後続のクロマ補正から非カラー画素を除外し、前記第2のエントリは前記非カラー画素に関連する、を更に備える、請求項1に記載の方法。
- クロマ成分の一方又は両方に対して実行されるグレーチェック結果に応答して前記補正比率マップを更新することを更に備える、請求項1に記載の方法。
- 前記画素がカラースポットアーティファクトに関連付けられることを前記エントリの第1のエントリが示す場合、前記複数の中央値のうちの1つを選択することが前記画素のオリジナル入力クロマ値に最も近い最も保守的な中央値を選択することを備える、請求項1に記載の方法。
- 前記補正済みクロマ値を出力することが、入力クロマ値を用いて前記最も保守的な中央値を重み付けすることを更に備える、請求項5に記載の方法。
- 前記複数の中央値のうちの1つを選択することが、前記画素が色収差に関連付けられることを前記エントリの第1のエントリが示す場合、前記画素のオリジナル入力クロマ値から最も離れた最も積極的な中央値を選択することを備える、請求項1に記載の方法。
- 前記画像中のカラーアーティファクトを補正するための前記補正比率マップを生成することは、
カラーアーティファクトマップを生成するために少なくとも1つの対称カーネルで前記ルーマ成分値を畳み込むことと、
前記カラーアーティファクトマップに少なくとも部分的に基づいて予備補正比率マップを生成することと、ここにおいて、前記予備補正比率マップが、前記画像の複数の画素の各々に対応するエントリを含み、
前記クロマ成分のうちの少なくとも1つに対してグレーチェックを実行することと、
後続の色補正からあらゆる非カラー画素を除外するために前記グレーチェックに少なくとも部分的に基づいて前記予備補正比率マップを更新し、それによって最終補正比率マップを生成することと
を備える、請求項1〜7のうちのいずれか一項に記載の方法。 - 前記ルーマ成分値に基づいて推定飽和マップを生成すること、ここにおいて、前記予備補正比率マップを生成することが、前記推定飽和マップに更に少なくとも部分的に基づく、を更に備える、請求項8に記載の方法。
- 前記グレーチェックを実行することが、飽和検出カーネルで前記クロマ成分のうちの少なくとも1つを畳み込むことを備える、請求項8に記載の方法。
- 少なくとも1つの対称カーネルで前記ルーマ成分値を畳み込むことが、前記ルーマ成分値をダウンサンプリングすることを更に備える、請求項8に記載の方法。
- 前記クロマ成分のうちの少なくとも1つに対してカラースポットチェックを実行することと、
前記カラースポットチェックに少なくとも部分的に基づいて前記予備補正比率マップを更新することと
を更に備える、請求項8に記載の方法。 - 実行されたとき、少なくとも1つのプロセッサに、請求項1〜12のいずれか一項に従って方法を実行させる命令を記憶するコンピュータ可読記憶媒体。
- 画像中のカラーアーティファクトを補正するためのシステムであって、
複数の画素を備える画像中の少なくとも1つのカラーアーティファクトを検出するように構成された検出モジュールと、ここにおいて、前記検出モジュールが、前記画像中の複数の画素の各々についてのエントリを有する補正比率マップを生成するように更に構成され、前記エントリが、対応する画素に関連するカラーアーティファクトのタイプを示し、
前記エントリに少なくとも部分的に基づいて前記対応する画素の補正済みクロマ値を計算するように構成された補正モジュールと、前記エントリが、前記対応する画素に関連するカラーアーティファクトのタイプを示し、前記補正モジュールが、補正済みクロマ値を計算するために使用すべき前記エントリに基づいて複数の方向性メディアンフィルタのうちの1つを選択するように更に構成され、前記補正モジュールは、前記対応する画素がカラースポットアーティファクトに関連付けられることを前記エントリが示す場合、第1の方向性メディアンフィルタを選択することと、前記対応する画素が色収差に関連付けられることを前記エントリが示す場合、第2の方向性メディアンフィルタを選択することとを行うように更に構成され、
前記補正済みクロマ値から形成される補正済み画像中で追加のアーティファクトの導入又は正当な色特徴の非飽和化を低減するために前記補正済みクロマ値を検証するように構成された検証モジュールと
を備える、システム。 - 前記検出モジュールが、撮影済み画像のルーマ成分の分析に少なくとも部分的に基づいて、予備補正比率マップエントリ値を生成するように構成された補正マップ回路を備える、請求項14に記載のシステム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361858956P | 2013-07-26 | 2013-07-26 | |
| US61/858,956 | 2013-07-26 | ||
| US14/191,190 | 2014-02-26 | ||
| US14/191,190 US9251572B2 (en) | 2013-07-26 | 2014-02-26 | System and method of correcting image artifacts |
| PCT/US2014/047465 WO2015013206A1 (en) | 2013-07-26 | 2014-07-21 | System and method of correcting image artifacts |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016525840A JP2016525840A (ja) | 2016-08-25 |
| JP2016525840A5 JP2016525840A5 (ja) | 2017-08-03 |
| JP6469678B2 true JP6469678B2 (ja) | 2019-02-13 |
Family
ID=52390593
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016529816A Expired - Fee Related JP6469678B2 (ja) | 2013-07-26 | 2014-07-21 | 画像アーティファクトを補正するシステム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9251572B2 (ja) |
| EP (1) | EP3025302B1 (ja) |
| JP (1) | JP6469678B2 (ja) |
| KR (1) | KR102214876B1 (ja) |
| CN (1) | CN105408936B (ja) |
| WO (1) | WO2015013206A1 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102025184B1 (ko) * | 2013-07-31 | 2019-09-25 | 엘지디스플레이 주식회사 | 데이터 변환 장치 및 이를 이용한 디스플레이 장치 |
| CN103714775B (zh) * | 2013-12-30 | 2016-06-01 | 北京京东方光电科技有限公司 | 像素阵列及其驱动方法、显示面板和显示装置 |
| US9554107B2 (en) * | 2014-02-07 | 2017-01-24 | Sony Corporation | Method and apparatus for reducing color fringing in composite images |
| JP6329412B2 (ja) * | 2014-03-26 | 2018-05-23 | 株式会社メガチップス | Simdプロセッサ |
| US9672765B2 (en) | 2015-09-30 | 2017-06-06 | Apple Inc. | Sub-pixel layout compensation |
| US10038862B2 (en) * | 2016-05-02 | 2018-07-31 | Qualcomm Incorporated | Methods and apparatus for automated noise and texture optimization of digital image sensors |
| EP4358531A2 (en) * | 2016-06-08 | 2024-04-24 | Google LLC | Generating a composite image from a physical item |
| CN108537763B (zh) * | 2017-03-01 | 2023-07-07 | 深圳开阳电子股份有限公司 | 一种图像颜色校正装置 |
| CN106934836B (zh) * | 2017-03-14 | 2020-12-01 | 潍坊学院 | 一种雾霾图像基于自动聚类的大气光值计算方法及系统 |
| CN106934779B (zh) * | 2017-03-14 | 2020-12-01 | 潍坊学院 | 一种图像去雾处理中大气光值计算方法及系统 |
| WO2019009490A1 (ko) | 2017-07-06 | 2019-01-10 | 삼성전자 주식회사 | 영상을 부호화/복호화 하는 방법 및 그 장치 |
| US10986356B2 (en) | 2017-07-06 | 2021-04-20 | Samsung Electronics Co., Ltd. | Method for encoding/decoding image and device therefor |
| KR102338466B1 (ko) * | 2017-12-08 | 2021-12-14 | 삼성전자주식회사 | 디스플레이 장치 및 디스플레이 장치의 제어방법 |
| CN109118555B (zh) * | 2018-08-14 | 2019-06-14 | 广州华端科技有限公司 | 计算机断层成像的金属伪影校正方法和系统 |
| WO2020080827A1 (en) | 2018-10-19 | 2020-04-23 | Samsung Electronics Co., Ltd. | Ai encoding apparatus and operation method of the same, and ai decoding apparatus and operation method of the same |
| WO2020080709A1 (en) * | 2018-10-19 | 2020-04-23 | Samsung Electronics Co., Ltd. | Artificial intelligence encoding and artificial intelligence decoding methods and apparatuses using deep neural network |
| WO2020080873A1 (en) | 2018-10-19 | 2020-04-23 | Samsung Electronics Co., Ltd. | Method and apparatus for streaming data |
| WO2020080765A1 (en) | 2018-10-19 | 2020-04-23 | Samsung Electronics Co., Ltd. | Apparatuses and methods for performing artificial intelligence encoding and artificial intelligence decoding on image |
| KR102525578B1 (ko) | 2018-10-19 | 2023-04-26 | 삼성전자주식회사 | 부호화 방법 및 그 장치, 복호화 방법 및 그 장치 |
| WO2020080665A1 (en) | 2018-10-19 | 2020-04-23 | Samsung Electronics Co., Ltd. | Methods and apparatuses for performing artificial intelligence encoding and artificial intelligence decoding on image |
| US11616988B2 (en) | 2018-10-19 | 2023-03-28 | Samsung Electronics Co., Ltd. | Method and device for evaluating subjective quality of video |
| KR102285738B1 (ko) | 2018-10-19 | 2021-08-05 | 삼성전자주식회사 | 영상의 주관적 품질을 평가하는 방법 및 장치 |
| US11720997B2 (en) | 2018-10-19 | 2023-08-08 | Samsung Electronics Co.. Ltd. | Artificial intelligence (AI) encoding device and operating method thereof and AI decoding device and operating method thereof |
| KR102436512B1 (ko) | 2019-10-29 | 2022-08-25 | 삼성전자주식회사 | 부호화 방법 및 그 장치, 복호화 방법 및 그 장치 |
| KR20210056179A (ko) | 2019-11-08 | 2021-05-18 | 삼성전자주식회사 | Ai 부호화 장치 및 그 동작방법, 및 ai 복호화 장치 및 그 동작방법 |
| KR20210157525A (ko) * | 2020-06-19 | 2021-12-29 | 삼성디스플레이 주식회사 | 표시 장치 및 이의 구동 방법 |
| KR102591594B1 (ko) * | 2021-05-10 | 2023-10-19 | 네이버웹툰 유한회사 | 인공신경망을 이용한 채색 이미지 보정 방법 및 그 장치 |
| CN113376439B (zh) * | 2021-07-08 | 2022-04-29 | 广西电网有限责任公司电力科学研究院 | 一种智能化防雷接地电阻在线监测系统 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0514925A (ja) * | 1991-07-01 | 1993-01-22 | Sony Corp | 画像信号処理装置 |
| US6542187B1 (en) | 1998-07-09 | 2003-04-01 | Eastman Kodak Company | Correcting for chrominance interpolation artifacts |
| JP3825932B2 (ja) * | 1999-02-19 | 2006-09-27 | キヤノン株式会社 | 画像処理装置、方法及びコンピュータ読み取り可能な記憶媒体 |
| US7009644B1 (en) * | 1999-12-15 | 2006-03-07 | Logitech Europe S.A. | Dynamic anomalous pixel detection and correction |
| US6377702B1 (en) * | 1999-12-08 | 2002-04-23 | Sony Corporation | Color cast detection and removal in digital images |
| JP2002010286A (ja) * | 2000-06-26 | 2002-01-11 | Canon Inc | 信号処理装置、信号処理方法、及び撮像装置 |
| EP1367837B1 (en) | 2001-01-25 | 2010-03-03 | Nikon Corporation | Image processing method, image processing program, and image processor |
| EP1512123B1 (en) * | 2002-06-12 | 2009-10-07 | Silicon Optix Inc. | System and method for electronic correction of optical anomalies |
| JP2004252620A (ja) * | 2003-02-19 | 2004-09-09 | Sony Corp | 画像処理装置および方法、並びに、プログラム |
| JP4479457B2 (ja) * | 2004-05-27 | 2010-06-09 | ソニー株式会社 | 画像処理装置、および画像処理方法、並びにコンピュータ・プログラム |
| JP4539280B2 (ja) * | 2004-10-19 | 2010-09-08 | ソニー株式会社 | 画像処理装置、および画像処理方法、並びにコンピュータ・プログラム |
| EP1650979A1 (en) | 2004-10-21 | 2006-04-26 | STMicroelectronics S.r.l. | Method and system for demosaicing artifact removal |
| US20060152596A1 (en) * | 2005-01-11 | 2006-07-13 | Eastman Kodak Company | Noise cleaning sparsely populated color digital images |
| WO2007007878A1 (ja) | 2005-07-14 | 2007-01-18 | Nikon Corporation | 画像処理装置および画像処理方法 |
| US8254718B2 (en) | 2008-05-15 | 2012-08-28 | Microsoft Corporation | Multi-channel edge-aware chrominance noise reduction |
| US8520969B2 (en) | 2009-08-25 | 2013-08-27 | Stmicroelectronics S.R.L. | Digital image processing apparatus and method |
| CN102867295B (zh) * | 2012-08-06 | 2015-10-21 | 电子科技大学 | 一种彩色图像颜色校正方法 |
| JP2014086932A (ja) * | 2012-10-25 | 2014-05-12 | Sony Corp | 画像処理装置、画像処理方法、および画像処理プログラム |
-
2014
- 2014-02-26 US US14/191,190 patent/US9251572B2/en active Active
- 2014-07-21 KR KR1020167004604A patent/KR102214876B1/ko active IP Right Grant
- 2014-07-21 WO PCT/US2014/047465 patent/WO2015013206A1/en active Application Filing
- 2014-07-21 CN CN201480041655.1A patent/CN105408936B/zh active Active
- 2014-07-21 JP JP2016529816A patent/JP6469678B2/ja not_active Expired - Fee Related
- 2014-07-21 EP EP14750087.0A patent/EP3025302B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016525840A (ja) | 2016-08-25 |
| CN105408936B (zh) | 2018-03-13 |
| KR102214876B1 (ko) | 2021-02-09 |
| EP3025302B1 (en) | 2017-11-01 |
| WO2015013206A1 (en) | 2015-01-29 |
| EP3025302A1 (en) | 2016-06-01 |
| KR20160036662A (ko) | 2016-04-04 |
| US9251572B2 (en) | 2016-02-02 |
| US20150030247A1 (en) | 2015-01-29 |
| CN105408936A (zh) | 2016-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6469678B2 (ja) | 画像アーティファクトを補正するシステム及び方法 | |
| KR102474715B1 (ko) | 매크로포토그래피를 위한 컬러 및 모노 이미지들의 시차 마스크 융합 | |
| JP5980294B2 (ja) | データ処理装置、撮像装置、およびデータ処理方法 | |
| KR20210139450A (ko) | 이미지 디스플레이 방법 및 디바이스 | |
| WO2018176925A1 (zh) | Hdr图像的生成方法及装置 | |
| KR102512889B1 (ko) | 이미지 융합 프로세싱 모듈 | |
| JP2017520050A (ja) | 局所的適応ヒストグラム平坦化 | |
| JPWO2014125659A1 (ja) | 画像処理装置、撮像装置、フィルタ生成装置、画像復元方法及びプログラム | |
| US11334961B2 (en) | Multi-scale warping circuit for image fusion architecture | |
| US8995784B2 (en) | Structure descriptors for image processing | |
| US20130084014A1 (en) | Processing method for image interpolation | |
| KR20230098575A (ko) | 프레임 프로세싱 및/또는 캡처 명령 시스템들 및 기법들 | |
| WO2023137956A1 (zh) | 图像处理方法、装置、电子设备及存储介质 | |
| JP2015062270A (ja) | 画像処理装置 | |
| CN113379609A (zh) | 一种图像处理方法、存储介质及终端设备 | |
| US10567787B1 (en) | Autofocusing images using motion detection | |
| US11798146B2 (en) | Image fusion architecture | |
| US20200053377A1 (en) | Image statistics for motion detection | |
| CN114679542B (zh) | 图像处理方法和电子装置 | |
| US11803949B2 (en) | Image fusion architecture with multimode operations | |
| US20230319401A1 (en) | Image capture using dynamic lens positions | |
| JP2017182668A (ja) | データ処理装置、撮像装置、及びデータ処理方法 | |
| US20180082396A1 (en) | Dynamic camera pipelines | |
| CN117764877A (zh) | 图像处理方法、装置、电子设备和计算机可读存储介质 | |
| CN117726564A (zh) | 图像处理方法、装置、电子设备和计算机可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170623 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6469678 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |