JP6423853B2 - ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 - Google Patents
ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 Download PDFInfo
- Publication number
- JP6423853B2 JP6423853B2 JP2016502602A JP2016502602A JP6423853B2 JP 6423853 B2 JP6423853 B2 JP 6423853B2 JP 2016502602 A JP2016502602 A JP 2016502602A JP 2016502602 A JP2016502602 A JP 2016502602A JP 6423853 B2 JP6423853 B2 JP 6423853B2
- Authority
- JP
- Japan
- Prior art keywords
- joint
- joints
- manipulator
- motion
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 31
- 230000033001 locomotion Effects 0.000 claims description 210
- 239000012636 effector Substances 0.000 claims description 89
- 230000000670 limiting effect Effects 0.000 claims description 9
- 230000006870 function Effects 0.000 description 33
- 238000001356 surgical procedure Methods 0.000 description 28
- 239000013598 vector Substances 0.000 description 25
- 238000010586 diagram Methods 0.000 description 20
- 230000007246 mechanism Effects 0.000 description 20
- 238000013459 approach Methods 0.000 description 15
- 238000003780 insertion Methods 0.000 description 12
- 230000037431 insertion Effects 0.000 description 12
- 230000008901 benefit Effects 0.000 description 11
- 230000009471 action Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 238000002432 robotic surgery Methods 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 6
- 238000003384 imaging method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 5
- 230000010354 integration Effects 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000002441 reversible effect Effects 0.000 description 5
- 210000003484 anatomy Anatomy 0.000 description 4
- 230000001143 conditioned effect Effects 0.000 description 4
- 210000003815 abdominal wall Anatomy 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 230000003750 conditioning effect Effects 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 229920006395 saturated elastomer Polymers 0.000 description 2
- 239000011800 void material Substances 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/1607—Calculation of inertia, jacobian matrixes and inverses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/007—Arms the end effector rotating around a fixed point
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/77—Manipulators with motion or force scaling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39079—Solve inverse differential kinematics in closed, feedback loop, iterate
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40327—Calculation, inverse kinematics solution using damped least squares method
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41405—Inverse kinematic, dynamic
Description
本出願は、米国特許仮出願ではなく、2013年3月15日に出願された、”System and Methods for Managing Multiple Null-Space Objectives and SLI Behaviors”(代理人整理番号ISRG03790PROV/US)という標題の米国特許仮出願第61/800,810号について優先権の利益を主張するものであり、この文献の全体の開示は、その全体を参照することにより本明細書に組み込まれる。
dx/dt=J dq/dt
dx/dt=dxdes/dt+kΔx (1)
dq/dt=J#dx/dt (2)
qi=qi−1+dq/dtΔt (3)
dq/dt=dq垂直/dt+dqゼロ/dt (4)
dq垂直/dt=J#dx/dt (5)
dqゼロ/dt=(1−J#J)z=VnVn Tz=Vnα (6)
dx/dt=J*dq/dt
y=h(q)
dy/dt=∂h/∂q*dq/dt
[dx/dtT dy/dtT]T=[JT ∂h/∂qT]T*dq/dt
d(x;y)/dt=[J;h’]*dq/dt
dq/dt=[J;h’]# d(x;y)/dt
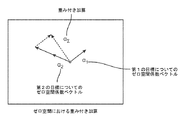
この属性は、複数の機能や目標のスケーリングされたブレンドを可能にする重み付き加算パラダイムで使用される。例えば、ユーザが、アーム同士の衝突回避目標のためにしたよりも2倍、拡張ピッチバック目標のためのゼロ空間の使用に重点をおくことを所望する場合に、拡張ピッチバック目標の重み付けは、アーム同士の衝突回避目標の重み付けの2倍となるように設定される。このような例が図14Aに示されており、この図14Aは、第1の目標についてのゼロ空間係数ベクトルα1、第2の目標についてのゼロ空間係数ベクトルα2を示す。第2の目標が第1の目標の2倍重み付けされたゼロ空間の運動を決定するために、第2の目標についてのゼロ空間係数ベクトルは、第1の目標についてのゼロ空間係数ベクトルα1と加算する前に、2倍にされ、それによって、得られた和、αΣは、ゼロ空間の運動の計算に使用するときに、第1の目標の2倍、第2の目標を強調するようなゼロ空間係数を表す。このような重み付けは、様々な他の属性を含む様々な他の管理アプローチに適用することができることを理解されたい。これは、基底ベクトルの単なる係数ではなく、ゼロ空間ベクトルに直接的に適用される重みを含む。
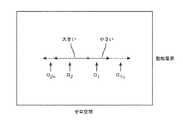
この属性は、互いに競合する又は打ち消し合うようなゼロ空間の複数の目標同士の間の管理を可能にする。上述したように、目的(目標)関数の数は、ゼロ空間の次元より大きくてもよい。これらの例において(時には厳密な次元よりも少ない場合もある)、複数の目的関数は、互いに正反対になるゼロ空間出力を生成することができる。この態様の一例が図14Bに示されており、この図14Bは、正反対のゼロ空間係数ベクトルα1u及びα2uを示す。これらの目的関数が、介入(intervention)なしに加算される場合に、その結果は、いずれかの目的関数について供された有益な動作をもたらさないようにゼロになる。飽和限界を使用することにより、最も高い飽和限界を有する目的関数は、より低い飽和限界を有する目的関数を圧倒することができる。例えば、ユーザは、アームと患者との衝突回避が、臨床の理由からアーム同士の衝突回避関数より常に優先する必要があることを望むことがある。このような場合に、ゼロ空間マネージャは、アームと患者との衝突回避が同順位の回避動作に勝つことを可能にし、それに応答して、直接的に競合するときに、マニピュレータは、患者の体表面を貫通する前に、マニュピュレータ自体を隣接するマニピュレータ内に駆動する。
このアプローチは、論理的な又は別々の分岐概念ではなく、連続的な空間の数学的概念を利用する。例えば、特定の目的関数がゼロ空間を無制限に使用し、他の目的関数も、前者の特定の目的(目標)関数の使用を妨害することなくゼロ空間を使用するという、1つの要件を想定する。優先順位の概念は、前者の特定の目標がゼロ空間全体にアクセスすることを可能にするだけでなく、後者の他の目標がゼロ空間の未使用の残りの直交部分にアクセスすることのみを可能にするような例に適用される。このアプローチは、前者の特定の目標が、実際は直線状であり、ゼロ空間における直交妨害がそのゼロ空間に影響を及ぼさないように提供される場合に、後者の他の目標が、前者の特定の目標の使用を妨げないので、有利である。このアプローチは、図14Cの実施例に示されるように実行してもよい。この実施例では、最も高い優先順位で操作される目的関数は、上述した(a)及び(b)の重み付け及び飽和技術の一方又は両方を使用等することによって、それらの出力を組み合わせることができる。得られた出力ベクトルは、次に、ゼロ空間にマッピングされる。ゼロ空間が1よりも大きな次元を有する場合に、優先順位の最も高いこの出力ベクトルに対して直交するゼロ空間の部分空間は、その後、次に優先順位の最も高いベクトルに利用可能である。次に最も高い優先順位の全ての目的関数の重み付けされた飽和合計が、ゼロ空間の残りの部分空間に投影される。このプロセスは、全ての目的関数の優先順位のレベルが対処されるまで又は全てのゼロ空間の次元を使い切るまで継続することができる。別の態様では、このアプローチは、関節固定、又は関節運動の取消しを可能にするためにも使用することができる。
ゼロ空間の各種目的(目標)関数は、部分的に自律的に構成することができる。効率性と使い易さの理由から、様々な用途において、いくつかの自律的な機能を可能にするのが有用である。もっとも安全上の理由から、外科医が、自律的な動作を監督し且つ無効にする能力を可能にすることが望ましい。この機能を可能にする1つの方法は、ゼロ空間の特定の目的関数の出力の大きさをマスターの速度に比例するように制限することである。このようにして、自律動作が望ましくない場合に、外科医は、マスターの動きを単に停止することができ、且つ自律的運動が停止する。しかしながら、マスター速度制限がそれら目的関数に適用される場合に、少なくともいくつかの目的関数が正しく機能しない場合がある。従って、この属性は、マスター速度制限を所定の目的関数に適用するかどうかをゼロ空間マネージャに伝える。このように、特定の目標は、制限が適しているこれらの目標のみにマスター速度制限が適用されるように、ゼロ空間のマネージャにフラグを立てることもできる。
飽和制限積分アルゴリズムは、関節速度制限や関節位置制限(例えば、急停止)のいずれかに違反することなく、命令された関節速度を積分して命令された関節位置を求める。以下で説明するようないくつかの変更が、ゼロ空間の2つ以上の特定の動作を可能にするために、特定の実施形態に対して行われ得る。この属性によって、マネージャが、複数の目的関数からのゼロ空間の統合出力を2つ以上のバケットに並べる(collate)ことが可能になり、各バケットは、以下の実施例のように、2つ以上の動作のそれぞれに関連付けられる。
SLIアルゴリズムは、動作プロファイルを関節速度及び関節位置制限内にフィットさせるために、関節速度の入力コマンドを変更する権限を有する。しかしながら、ゼロ空間の速度コマンドについてゼロ空間内に残るようにするために、SLIアルゴリズムは、速度の大きさのみを制限する必要があるが、方向は制限する必要がない。例えば、ツールチップの姿勢を阻害することを回避するために、速度ベクトルは、方向変化を含まなくてもよい。この動作は、他の出力よりもゼロ空間の特定の目標出力について有用であり、検討が望まれるゼロ空間の目標に従って選択的に使用することができる。動作1の態様が、図14Dに示されている。
動作1に関連する1つの欠点は、例えば、マニピュレータが関節が制限される壁に接しており且つこの壁に沿って摺動するように命令された場合に発生し得る、大抵の場合、「扱い難い(sticky)壁」と呼ばれる現象を引き起こすことがあるということである(図14D参照)。このような動きについて、動作1を適用して、方向を変えることなく、任意の摺動コマンド(例えば、要素を壁に向けて動かす運動)について長さを0にまで短くすることのみ行う。従って、摺動は許容されず、関節制限によって、扱い難い壁のように振る舞うことになる。特定のアルゴリズムは、自由度毎の単位で速度制限を行うことにより、この問題を回避することができる。このようなケースでは、関節制限に関する自由度のみがゼロに設定されるが、残りの自由度は影響を受けないだろう。この結果は、ツールチップの動作を命令するときに所望の動作である、関節制限に沿った摺動コマンドであろう。特定の実施形態では、関節速度制限は、ベクトルを用いた方法に適用されるが、関節位置制限は、自由度毎の様式で適用される。
これらの一般的な概念に従った他の属性(現在使用されていないか、当業者により想起される属性)が、ゼロ空間マネージャを介して、特定の方法で複数の目的関数を異なるように処理するために使用され得る。また、所望の目標及び/又はゼロ空間の関連する運動に基づいて、上述した属性の様々な組合せを様々な方法で使用し且つ適用することができることが理解される。
Claims (15)
- マニピュレータアームを移動させる装置であって、該マニピュレータアームは、エンドエフェクタを支持するように構成された可動式先端部分と、ベースに結合された基端部分と、前記先端部分と前記ベースとの間の複数の関節とを含み、前記複数の関節は、前記先端部分の所定状態について前記複数の関節の異なる範囲の関節状態を可能にするのに十分な自由度を有しており、当該装置は、
前記エンドエフェクタの状態を維持する前記複数の関節の動作について複数の目標を特定する手段と、
前記複数の目標に関連する複数の属性を特定する手段であって、前記複数の属性の各属性は、前記複数の目標のうちの対応する目標に関連付けられる、特定する手段と、
前記複数の関節の複数の運動を計算する手段であって、前記複数の運動の各運動は、前記複数の目標のうちの対応する1つに従って、前記エンドエフェクタの状態を維持するように計算される、計算する手段と、
前記エンドエフェクタの命令された運動に関連付けられたマスター速度に関して前記複数の運動のうちの少なくとも1つを制限しながら、前記複数の属性を用いて前記複数の運動を組合せ運動に結合することにより、前記複数の関節の組合せ運動を決定する手段と、
前記複数の関節を駆動して、前記複数の関節の前記組合せ運動を生じさせる手段と、を含む、
装置。 - 前記複数の運動の各運動の関節速度方向は、前記マニピュレータアームのヤコビアンのゼロ空間にあり、
前記組合せ運動の関節速度方向は、前記マニピュレータアームの前記ヤコビアンの前記ゼロ空間にある、
請求項1に記載の装置。 - 前記複数の属性は、前記複数の目標同士の間の重み付けに対応する複数の重みを含み、
前記組合せ運動を決定する手段は、前記複数の重みを用いて前記複数の運動の重み付けされた組合せを計算する手段を含む、
請求項1に記載の装置。 - システムであって、当該システムは:
エンドエフェクタを支持するように構成された可動式先端部分、ベースに結合された基端部分、及び前記先端部分と前記ベースとの間の複数の関節を含むマニピュレータアームであって、前記複数の関節は、前記先端部分の所定状態について前記複数の関節の異なる範囲の関節状態を可能にするのに十分な自由度を有する、マニピュレータアームと;
該マニピュレータアームに結合されるプロセッサと;を有しており、
該プロセッサは、
前記エンドエフェクタの状態を維持する前記複数の関節の動作について複数の目標を特定すること、
前記複数の目標に関連する複数の属性を特定することであって、前記複数の属性の各属性は、前記複数の目標のうちの対応する目標に関連付けられる、特定すること、
前記複数の関節の複数の運動を計算することであって、前記複数の運動の各運動は、前記複数の目標のうちの対応する1つに従って、前記エンドエフェクタの状態を維持するように計算される、計算すること、
前記エンドエフェクタの命令された運動に関連付けられたマスター速度に関して前記複数の運動のうちの少なくとも1つを制限しながら、前記複数の属性を用いて前記複数の運動を組合せ運動に結合することにより、前記複数の関節の組合せ運動を決定すること、
コマンドを前記マニピュレータアームに送信して前記複数の関節を駆動させ、前記複数の関節の前記組合せ運動を生じさせること、を含む操作を実行するように構成される、
システム。 - 前記複数の運動の各運動の関節速度方向は、前記マニピュレータアームのヤコビアンのゼロ空間にある、
請求項4に記載のシステム。 - 前記複数の運動の各運動の関節速度方向は、前記マニピュレータアームのヤコビアンのゼロ空間にあり、
前記組合せ運動の関節速度方向は、前記マニピュレータアームの前記ヤコビアンの前記ゼロ空間にある、
請求項4に記載のシステム。 - 前記複数の属性は、前記複数の目標同士の間の重み付けに対応する複数の重みを含み、
前記組合せ運動を決定することは、前記複数の重みを用いて前記複数の運動の重み付けされた組合せを計算することを含む、
請求項4に記載のシステム。 - 前記複数の属性は、前記複数の目標のうちの第1の目標についての飽和値、第1の目標に対応する前記複数の運動のうちの第1の運動を含み、
前記組合せ運動を決定することは、前記飽和値を適用して第1の運動の値を制限することを含む、
請求項4に記載のシステム。 - 前記複数の属性は、前記エンドエフェクタの状態を維持する、複数の方向から構成される空間について、前記複数の目標同士の間の優先順位に対応する複数の優先順位を含み、
前記組合せ運動を決定することは、前記複数の優先順位に従って、前記複数の運動を複数の方向から構成される空間に投影し、低い優先順位に関連する運動の寄与が、より高い優先順位に関連する運動の寄与と競合しないようにすることを含む、
請求項4に記載のシステム。 - 前記複数の属性は、マスター制御入力装置のマスター速度に対して関節速度を制限するための速度制限属性を含み、
前記マスター速度に関して前記複数の運動のうちの少なくとも1つを制限しながら、複数の属性を用いて前記複数の運動を組合せ運動に結合することにより、前記組合せ運動を決定することは、前記速度制限属性を用いて、前記マスター速度に対する前記複数の運動のうちの1つ又は複数或いは前記組合せ運動の関節速度の大きさを測定することを含む、
請求項4に記載のシステム。 - 前記複数の属性は、マスター制御入力装置のマスター速度に対して関節速度を制限するための速度制限属性を含み、
前記プロセッサは、前記速度制限属性が設定されており且つ前記マスター制御入力装置が動作中ではない場合に、前記プロセッサが、前記複数の関節を駆動させ、前記マニピュレータアームを移動させる前記コマンドを前記マニピュレータアームに送信しない、
請求項4に記載のシステム。 - 前記複数の属性は、第1の関節の関節制限に関して前記複数の関節のうちの第1の関節の関節値を制限するための値制限属性を含み、
前記組合せ運動を決定することは、前記複数の運動のうちの1つ又は複数或いは前記組合せ運動について関節速度の大きさを測定し、第1の関節が前記関節制限に違反するのを回避することを含む、
請求項4に記載のシステム。 - 前記複数の属性は、第1の関節の関節制限に関して前記複数の関節のうちの第1の関節の関節値を制限するための値制限属性を含み、
前記組合せ運動を決定することは、前記複数の運動のうちの1つ又は複数或いは前記組合せ運動に関節速度成分を加えることを含み、前記関節速度成分は、第1の関節の関節速度を打ち消して、第1の関節が前記関節制限に違反するのを回避する、
請求項4に記載のシステム。 - 操作コマンドを受け取って前記先端部分を移動させるように構成された入力装置をさらに含み、
前記プロセッサは、前記入力装置に結合され、前記プロセッサは、
前記複数の関節の先端部分の運動を計算することであって、該先端部分の運動は、前記操作コマンドに従って前記先端部分の運動を生じさせる関節速度方向で計算される、計算すること、
コマンドを前記マニピュレータアームに送信して前記複数の関節を駆動させ、前記複数の関節の前記組合せ運動と組み合わされた前記複数の関節の前記先端部分の運動を生じさせることと、を含む操作を実行するようにさらに構成される、
請求項4に記載のシステム。 - プロセッサによって実行されたときに、該プロセッサにマニピュレータアームを移動させる操作を実行させる命令を記憶する記録ユニットであって、前記マニピュレータアームは、エンドエフェクタを支持するように構成された可動式先端部分と、ベースに結合された基端部分と、前記先端部分と前記ベースとの間の複数の関節とを含み、前記複数の関節は、前記先端部分の所定状態について前記複数の関節の異なる範囲の関節状態を可能にするのに十分な自由度を有しており、前記操作は、
前記エンドエフェクタの状態を維持する前記複数の関節の動作について複数の目標を特定することと、
前記複数の目標に関連する複数の属性を特定することであって、前記複数の属性の各属性は、前記複数の目標のうちの対応する目標に関連付けられる、特定することと、
前記複数の関節の複数の運動を計算することであって、前記複数の運動の各運動は、前記複数の目標のうちの対応する1つに従って、前記エンドエフェクタの状態を維持するように計算される、計算することと、
前記エンドエフェクタの命令された運動に関連付けられたマスター速度に関して前記複数の運動のうちの少なくとも1つを制限しながら、前記複数の属性を用いて前記複数の運動を組合せ運動に結合することにより、前記複数の関節の組合せ運動を決定することと、
前記複数の関節を駆動して、前記複数の関節の前記組合せ運動を生じさせることと、を含む、
記録ユニット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361800810P | 2013-03-15 | 2013-03-15 | |
| US61/800,810 | 2013-03-15 | ||
| PCT/US2014/031055 WO2014146095A1 (en) | 2013-03-15 | 2014-03-18 | System and methods for managing multiple null-space objectives and sli behaviors |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018197373A Division JP6585265B2 (ja) | 2013-03-15 | 2018-10-19 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016514492A JP2016514492A (ja) | 2016-05-23 |
| JP2016514492A5 JP2016514492A5 (ja) | 2017-04-13 |
| JP6423853B2 true JP6423853B2 (ja) | 2018-11-14 |
Family
ID=50736165
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016502602A Active JP6423853B2 (ja) | 2013-03-15 | 2014-03-18 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
| JP2018197373A Active JP6585265B2 (ja) | 2013-03-15 | 2018-10-19 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
| JP2019160904A Active JP6793797B2 (ja) | 2013-03-15 | 2019-09-04 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018197373A Active JP6585265B2 (ja) | 2013-03-15 | 2018-10-19 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
| JP2019160904A Active JP6793797B2 (ja) | 2013-03-15 | 2019-09-04 | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US10513031B2 (ja) |
| EP (2) | EP4115839A1 (ja) |
| JP (3) | JP6423853B2 (ja) |
| KR (3) | KR102391773B1 (ja) |
| CN (3) | CN105120788B (ja) |
| WO (1) | WO2014146095A1 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014028703A1 (en) | 2012-08-15 | 2014-02-20 | Intuitive Surgical Operations, Inc. | Systems and methods for cancellation of joint motion using the null-space |
| EP4115839A1 (en) | 2013-03-15 | 2023-01-11 | Intuitive Surgical Operations, Inc. | System for managing multiple null-space objectives and sli behaviors |
| EP3119333B1 (en) | 2014-03-17 | 2021-05-05 | Intuitive Surgical Operations, Inc. | System for aligning with a reference target |
| US10624807B2 (en) | 2014-10-27 | 2020-04-21 | Intuitive Surgical Operations, Inc. | System and method for integrated surgical table icons |
| US10405944B2 (en) | 2014-10-27 | 2019-09-10 | Intuitive Surgical Operations, Inc. | Medical device with active brake release control |
| CN107072728B (zh) | 2014-10-27 | 2020-07-17 | 直观外科手术操作公司 | 用于在反应运动期间监测控制点的系统和方法 |
| CN110584789B (zh) | 2014-10-27 | 2022-09-20 | 直观外科手术操作公司 | 用于器械干扰补偿的系统和方法 |
| JP6676061B2 (ja) | 2014-10-27 | 2020-04-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 統合された手術台運動のためのシステム及び方法 |
| KR102617042B1 (ko) | 2014-10-27 | 2023-12-27 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 테이블에 등록하기 위한 시스템 및 방법 |
| EP3212149A4 (en) | 2014-10-27 | 2018-05-30 | Intuitive Surgical Operations, Inc. | System and method for integrated surgical table |
| CN107249500A (zh) | 2015-05-29 | 2017-10-13 | 奥林巴斯株式会社 | 医疗用机械手系统 |
| WO2017033353A1 (ja) * | 2015-08-25 | 2017-03-02 | 川崎重工業株式会社 | 遠隔操作ロボットシステム |
| JP2017177321A (ja) * | 2016-03-23 | 2017-10-05 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| CN107811710B (zh) * | 2017-10-31 | 2019-09-17 | 微创(上海)医疗机器人有限公司 | 手术辅助定位系统 |
| WO2020172394A1 (en) | 2019-02-22 | 2020-08-27 | Auris Health, Inc. | Surgical platform with motorized arms for adjustable arm supports |
| CN113874951A (zh) * | 2019-05-23 | 2021-12-31 | 直观外科手术操作公司 | 用于产生工作区体积和识别外科器械的可及工作区的系统和方法 |
| US10758309B1 (en) | 2019-07-15 | 2020-09-01 | Digital Surgery Limited | Methods and systems for using computer-vision to enhance surgical tool control during surgeries |
| GB2588629B (en) * | 2019-10-29 | 2024-01-03 | Cmr Surgical Ltd | Robotic joint control |
| CN111538234B (zh) * | 2020-07-08 | 2020-10-09 | 深圳市优必选科技股份有限公司 | 任务分层控制方法、装置、机器人和可读存储介质 |
| CN111966074A (zh) * | 2020-08-04 | 2020-11-20 | 厦门理工学院 | 一种工业控制设备安全测试系统及方法 |
| CN114052917A (zh) * | 2021-11-16 | 2022-02-18 | 深圳市精锋医疗科技股份有限公司 | 操作臂、从操作设备和手术机器人 |
| CN114083519B (zh) * | 2021-12-31 | 2023-05-09 | 北京敏锐达致机器人科技有限责任公司 | 机器人零空间拖动示教方法及示教装置 |
| JP2023103734A (ja) * | 2022-01-14 | 2023-07-27 | キヤノン株式会社 | 連続体ロボットシステム |
| CN114951475B (zh) * | 2022-05-23 | 2023-09-05 | 无锡维凯科技有限公司 | 一种满足前后冲床节拍的移载分料机构 |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04340603A (ja) * | 1991-05-17 | 1992-11-27 | Mitsubishi Electric Corp | 障害物回避を考慮したマニピュレータの制御方法 |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5184601A (en) | 1991-08-05 | 1993-02-09 | Putman John M | Endoscope stabilizer |
| ATE238140T1 (de) | 1992-01-21 | 2003-05-15 | Stanford Res Inst Int | Chirurgisches system |
| US5430643A (en) * | 1992-03-11 | 1995-07-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Configuration control of seven degree of freedom arms |
| DE69417229T2 (de) | 1993-05-14 | 1999-07-08 | Stanford Res Inst Int | Chirurgiegerät |
| US6406472B1 (en) | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6699177B1 (en) | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6786896B1 (en) | 1997-09-19 | 2004-09-07 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6714839B2 (en) * | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| AU5391999A (en) | 1998-08-04 | 2000-02-28 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6565554B1 (en) * | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US9517106B2 (en) * | 1999-09-17 | 2016-12-13 | Intuitive Surgical Operations, Inc. | Systems and methods for commanded reconfiguration of a surgical manipulator using the null-space |
| US10029367B2 (en) | 1999-09-17 | 2018-07-24 | Intuitive Surgical Operations, Inc. | System and method for managing multiple null-space objectives and constraints |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| US9510911B2 (en) | 1999-09-17 | 2016-12-06 | Intuitive Surgical Operations, Inc. | System and methods for managing multiple null-space objectives and SLI behaviors |
| US6702805B1 (en) | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| WO2002062199A2 (en) | 2001-01-16 | 2002-08-15 | Microdexterity Systems, Inc. | Surgical manipulator |
| JP2004094399A (ja) * | 2002-08-29 | 2004-03-25 | Mitsubishi Heavy Ind Ltd | 多関節マニピュレータの制御方法及びその制御プログラム、並びにその制御システム |
| KR20080028959A (ko) * | 2005-07-25 | 2008-04-02 | 올림푸스 메디칼 시스템즈 가부시키가이샤 | 의료용 제어 장치 |
| JP4823597B2 (ja) * | 2005-07-25 | 2011-11-24 | オリンパスメディカルシステムズ株式会社 | 医療用制御装置 |
| US7741802B2 (en) * | 2005-12-20 | 2010-06-22 | Intuitive Surgical Operations, Inc. | Medical robotic system with programmably controlled constraints on error dynamics |
| US8467904B2 (en) * | 2005-12-22 | 2013-06-18 | Honda Motor Co., Ltd. | Reconstruction, retargetting, tracking, and estimation of pose of articulated systems |
| US8620473B2 (en) * | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US7843158B2 (en) * | 2008-03-31 | 2010-11-30 | Intuitive Surgical Operations, Inc. | Medical robotic system adapted to inhibit motions resulting in excessive end effector forces |
| CN101327589B (zh) * | 2008-07-10 | 2010-12-22 | 上海交通大学 | 遥操作平面冗余度机械臂指令输入及构型控制系统及方法 |
| KR101948703B1 (ko) * | 2009-11-13 | 2019-02-15 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 곡선형 캐뉼라 및 로봇 조작기 |
| JP5475629B2 (ja) * | 2010-01-12 | 2014-04-16 | 本田技研工業株式会社 | 軌道計画方法、軌道計画システム及びロボット |
| IT1401669B1 (it) * | 2010-04-07 | 2013-08-02 | Sofar Spa | Sistema di chirurgia robotizzata con controllo perfezionato. |
| KR101598773B1 (ko) * | 2010-10-21 | 2016-03-15 | (주)미래컴퍼니 | 수술용 로봇의 움직임 제어/보상 방법 및 장치 |
| US9101379B2 (en) * | 2010-11-12 | 2015-08-11 | Intuitive Surgical Operations, Inc. | Tension control in actuation of multi-joint medical instruments |
| CN102126219B (zh) * | 2010-11-22 | 2012-11-07 | 中山大学 | 一种冗余度机械臂容错型运动规划方法 |
| CN102387532B (zh) | 2011-01-10 | 2013-12-04 | 华为技术有限公司 | 频点信息处理方法和用户设备 |
| WO2013038544A1 (ja) * | 2011-09-15 | 2013-03-21 | 株式会社安川電機 | ロボットシステム及びロボット制御装置 |
| WO2013078529A1 (en) | 2011-11-30 | 2013-06-06 | Titan Medical Inc. | Apparatus and method for supporting a robotic arm |
| CN102902269B (zh) * | 2012-09-21 | 2015-07-01 | 北京邮电大学 | 预选择最小距离指标冗余机器人动态避障方法 |
| CN102896628A (zh) * | 2012-09-27 | 2013-01-30 | 河南科技大学 | 一种四自由度全解耦并联机器人机构 |
| KR102188100B1 (ko) * | 2013-03-15 | 2020-12-07 | 삼성전자주식회사 | 로봇 및 그 제어방법 |
| CN105050526B (zh) * | 2013-03-15 | 2018-06-01 | 直观外科手术操作公司 | 利用零空间以便利进入笛卡尔坐标空间的边缘的系统和方法 |
| WO2014146113A1 (en) * | 2013-03-15 | 2014-09-18 | Intuitive Surgical Operations, Inc. | Systems and methods for tracking a path using the null-space |
| EP4115839A1 (en) | 2013-03-15 | 2023-01-11 | Intuitive Surgical Operations, Inc. | System for managing multiple null-space objectives and sli behaviors |
| US10957077B2 (en) | 2016-09-01 | 2021-03-23 | Warple Inc. | Systems and methods for obtaining opinion data from individuals via a web widget and displaying a graphic visualization of aggregated opinion data with waveforms that may be embedded into the web widget |
-
2014
- 2014-03-18 EP EP22193555.4A patent/EP4115839A1/en active Pending
- 2014-03-18 CN CN201480014809.8A patent/CN105120788B/zh active Active
- 2014-03-18 KR KR1020217024230A patent/KR102391773B1/ko active IP Right Grant
- 2014-03-18 KR KR1020157028814A patent/KR102164195B1/ko active IP Right Grant
- 2014-03-18 EP EP14725289.4A patent/EP2969407B1/en active Active
- 2014-03-18 KR KR1020207027960A patent/KR102285954B1/ko active IP Right Grant
- 2014-03-18 JP JP2016502602A patent/JP6423853B2/ja active Active
- 2014-03-18 WO PCT/US2014/031055 patent/WO2014146095A1/en active Application Filing
- 2014-03-18 CN CN201811194748.4A patent/CN109171975B/zh active Active
- 2014-03-18 CN CN202110307020.3A patent/CN112932676A/zh active Pending
-
2018
- 2018-04-30 US US15/967,545 patent/US10513031B2/en active Active
- 2018-10-19 JP JP2018197373A patent/JP6585265B2/ja active Active
-
2019
- 2019-09-04 JP JP2019160904A patent/JP6793797B2/ja active Active
- 2019-10-31 US US16/670,825 patent/US11173598B2/en active Active
-
2021
- 2021-10-19 US US17/505,566 patent/US11602840B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20150132326A (ko) | 2015-11-25 |
| JP2019048084A (ja) | 2019-03-28 |
| JP2020000904A (ja) | 2020-01-09 |
| JP6585265B2 (ja) | 2019-10-02 |
| KR102164195B1 (ko) | 2020-10-12 |
| KR102285954B1 (ko) | 2021-08-05 |
| CN105120788B (zh) | 2018-10-16 |
| CN105120788A (zh) | 2015-12-02 |
| CN109171975B (zh) | 2021-04-09 |
| EP4115839A1 (en) | 2023-01-11 |
| WO2014146095A1 (en) | 2014-09-18 |
| CN109171975A (zh) | 2019-01-11 |
| JP2016514492A (ja) | 2016-05-23 |
| KR20200116544A (ko) | 2020-10-12 |
| US11602840B2 (en) | 2023-03-14 |
| CN112932676A (zh) | 2021-06-11 |
| KR20210098549A (ko) | 2021-08-10 |
| US20180243906A1 (en) | 2018-08-30 |
| EP2969407A1 (en) | 2016-01-20 |
| US20200061813A1 (en) | 2020-02-27 |
| US11173598B2 (en) | 2021-11-16 |
| US10513031B2 (en) | 2019-12-24 |
| JP6793797B2 (ja) | 2020-12-02 |
| EP2969407B1 (en) | 2022-11-02 |
| KR102391773B1 (ko) | 2022-04-28 |
| US20220032453A1 (en) | 2022-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6585265B2 (ja) | ゼロ空間での複数の目標及びsli動作を取り扱うシステム及び方法 | |
| JP6475804B2 (ja) | ゼロ空間を使用した関節運動の相殺のためのシステム及び方法 | |
| US10029367B2 (en) | System and method for managing multiple null-space objectives and constraints | |
| US9675422B2 (en) | Systems and methods for avoiding collisions between manipulator arms using a null-space | |
| US9931172B2 (en) | Systems and methods for using the null space to emphasize manipulator joint motion anisotropically | |
| US9510911B2 (en) | System and methods for managing multiple null-space objectives and SLI behaviors | |
| EP2969405B1 (en) | Systems for facilitating access to edges of cartesian-coordinate space using the null space | |
| EP2969406B1 (en) | Systems for tracking a path using the null-space | |
| JP6291484B2 (ja) | ゼロ空間を使用して手術用マニピュレータの命令された再構成を取るためのシステム及び方法 | |
| JP2016516487A (ja) | ゼロ空間運動と同時にゼロ直交空間内でのクラッチングによりマニピュレータアームを位置決めするためのシステム及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180410 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181002 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181019 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6423853 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |