以下、本発明を用いた作業機械の周囲監視装置の実施の形態について図面を用いて説明する。ここでは作業機械としてダンプトラックを適用した例について説明するが、作業機械はダンプトラックのみに限定されない。つまり、本発明は、油圧ショベルを含む、所定の作業(運搬や掘削等)を行う任意の作業機械に適用することができる。
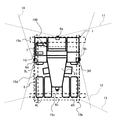
図1は、本発明の実施の形態に係るダンプトラックの上面図を示している。この図に示すダンプトラック1は、車体フレーム2と、車体フレーム2に対して回転可能に取り付けられた前輪3(3L及び3R)と後輪4(4L及び4R)と、車体フレーム2の上方に起伏可能に取り付けられたベッセル5と、シャーシや車体フレーム2等に固定された単眼カメラ6(6a及び6b及び6c及び6d)と、車体フレーム2の前方上部に設けられた運転室7と、車体フレーム2上の任意の場所(例えば運転室7の内部)に搭載された画像処理装置10と、運転室7の内部に設けられた表示装置100とを備えている。車体フレーム2はダンプトラック1の本体を形成するものであり、車体フレーム2の前方に前輪3、後方に後輪4を設けている。なお、前輪3Rは車両右側の前輪であり、前輪3Lは車両左側の前輪である。また、後輪4Rは車両右側の2つの後輪であり、後輪4Lは車両左側の2つの後輪である。ベッセル5はいわゆる荷台であり、土砂や鉱物等を積載するために利用される。なお、図示した前輪3および後輪4の配置および数は一例に過ぎない。
撮像装置である単眼カメラ6は、ダンプトラック1の任意の位置に設置することができる。本実施の形態では、合計4台のカメラ6a,6b,6c,6dが搭載されており、カメラ6aは、その視野範囲11(図1の破線11の範囲)に車両前方15aが含まれるように、ダンプトラック1の前方上部に斜め下方を俯瞰する格好で設置されている。これと同様に、カメラ6bは、視野範囲12に車両右側方15bが含まれるように車両右側方上部に設置されており、カメラ6cは、視野範囲13に車両後方15cが含まれるように車両後方上部に設置されており、カメラ6dは、視野範囲14に車両左側方15dが含まれるように車両左側方上部に設置されている。
図2は図1に示したダンプトラック1の側面図を示している。
前方視野範囲11(図2の破線11の範囲)を有するカメラ6aは運転室7から見て右斜め前方の位置に取り付けられ、右側方視野範囲12(図2の破線12の範囲)を有するカメラ6bは運転室7から見ての右斜め後方の位置に取り付けられ、後方視野範囲13(図2の破線13の範囲)を有するカメラ6cは車体フレーム2の後方に取り付けられている。右側方視野範囲12(図2に示していない)カメラ6dは運転室7から見て左斜め後方の位置に取り付けられているが、図2には示されていない。4台のカメラ6a,6b,6c,6dが撮影した映像は画像データとして画像処理装置10に出力される。
運転室7はオペレータが搭乗してダンプトラック1を操作するためのステアリングハンドル、アクセルペダルおよびブレーキペダルを含む各種の操作手段が設けられている。その他の操作手段としては、例えば、ダンプトラック1を前進または後進させるシフトレバーがある。運転室7には画像処理装置10と表示装置100とが設けられており、4台のカメラ6a,6b,6c,6dにより撮影・生成される画像データは画像処理装置10で所定の画像処理が行なわれる。画像処理が行なわれた画像データは表示装置100に表示される。基本的に表示装置100には4台のカメラ6a,6b,6c,6dが撮影する映像が表示されている。
ここで、図2においては、前方視野範囲11はダンプトラック1の前方の斜め下方の領域となっている。右側方視野範囲12、後方視野範囲13、左側方視野範囲14も同様である。
図3は本発明の実施の形態に係る画像処理装置10の全体構成図である。この図に示す画像処理装置10は、演算装置、記憶装置及び入出力装置を備えるコンピュータであり、画像入力部20、画像記憶部30、画像合成部35、障害物候補領域抽出部50、輝度算出領域設定部60、輝度算出部70、および障害物検知部90として機能する。
4台のカメラ6a,6b,6c,6dで撮影されたカメラ画像(入力画像)は、それぞれ所定のサンプリング間隔で画像入力部20に入力され、画像記憶部30に記憶される。
画像記憶部30は、画像入力部20からの入力画像を予め定められた間隔でサンプリングして記憶する。画像入力部20からの入力画像のサンプリング間隔は一定でも良いがダンプトラック1の速度に応じて異ならせても良い。例えば、停止時はサンプリング間隔を長く、移動時はサンプリング間隔を短くして記憶すると、必要最低限の入力画像による画像処理でよく、時間短縮が図れて処理の適正化を図ることが可能になる。
画像合成部35は、4台のカメラ6a,6b,6c,6dから出力され画像記憶部30に記憶された複数のカメラ画像を1画像に合成する。
本実施の形態の作業機械の周囲監視装置の画像合成部35で実行される処理手順の一例を図4に示す。まず、ステップ35aで、画像合成部35は、画像記憶部30から入力した画像が4台のカメラ6a,6b,6c,6dのうちどのカメラの画像であるか判定する。そして、前方カメラ6aの場合には画像処理画面の左上に配置する処理を行ない(ステップ35b)、右側方カメラ6bの場合には画像処理画面の右上に配置する処理を行ない(ステップ35c)、後方カメラ6cの場合には画像処理画面の右下に配置する処理を行ない(ステップ35d)、左側方カメラ6dの場合には画像処理画面の左下に配置する処理を行う(ステップ35e)。この手順により4台のカメラ6a、6b、6c、6dの画像を1フレームとする合成画像が生成される(ステップ35f)。
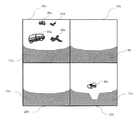
本実施の形態の作業機械の周囲監視装置のカメラ6aの入力画像20aと、カメラ6bの入力画像20bと、カメラ6cの入力画像20cと、カメラ6dの入力画像20dとを画像合成部35で合成した画像の一例を図5に示す。図5には、入力画像20aにおいてカメラ近くに車90a及び地面のしみ90bが存在し、カメラ遠方に車90c及び地面のしみ90dが存在している。また、入力画像20cにおいてカメラ近くに車90eが存在している。
なお、4台のカメラ6a、6b、6c、6dの画像を1枚の画像にした例として図5のものを挙げて説明したが、これは一例に過ぎず、当該1枚の画像における各画像の配置は図5に示したもの以外のものでも良い。また、ここで説明する例では、4台のカメラ画像を利用して障害物検知を行うが、障害物検知に利用するカメラの台数(すなわち、障害物検知に利用する画像の枚数)はいくつでも良い。
輝度算出領域設定部60は、4台のカメラ6a,6b,6c,6dそれぞれで撮影された入力画像20a,20b,20c,20d中に設定される所定の閉領域であって、その内部に含まれる画素の輝度分布が分散する傾向が強い領域(輝度ムラが生じる傾向が強い領域)を予め設定する部分である。ここでは、輝度算出領域設定部60によって設定される領域を輝度算出領域(第2領域)と称することがある。詳細は後述するが、輝度算出領域は、障害物候補領域抽出部50が抽出した障害物候補領域の内部に含まれる複数の画素の輝度を輝度算出部70が算出するか否かを決定するための判定に利用されることがある。
4台のカメラ6a,6b,6c,6dのそれぞれの入力画像20a,20b,20c,20d中に輝度算出領域設定部60によって設定される輝度算出領域60a,60b,60c,60dの一例を図6に示す。図6の輝度算出領域60a,60b,60c,60dは矩形で規定されている。
ダンプトラック1を含む作業機械は、一般的な乗用車と比較して巨大で車高も高いため、周囲監視用のカメラ(撮像装置)6a,6b,6c,6dの設置位置は高くなる傾向がある。そのため、ある程度の高さを有する立体的な障害物(例えば、入力画像20aにおける車90a)がカメラの近くに存在する場合には、その障害物の上部からカメラが撮影するため、カメラ画像(入力画像)にその障害物の全形が表れることが少なくない。そして、その立体的な障害物に光(昼間の日光や夜間のダンプトラック1の照明等)が当たると、光の当たり易い場所(例えば、障害物の上部)と当たり難い場所(例えば、障害物の下部)が発生して、その障害物に係る画素の輝度分布が分散する傾向が強い。これに対して、ほぼ高さの無い平坦な物体(水溜まり・雪溜まり、地面上のシミ等がこれに該当し、例えば、入力画像20aにおけるしみ90b)は略一様に光が当たるので、その全形が表れても、光の当たり方(明るさ)が一様になりやすい(つまり、輝度分布が集中する傾向が強い)。
また、カメラ遠方に物体が存在する場合には、画像中のその物体のサイズが小さくなるため細かい輝度分布が捨象され、また、画像中に現れるその物体の部分が限定される(例えば、立体的な物体(入力画像20aにおける車90c)であれば主に側面が、平坦な物体(入力画像20aにおけるしみ90d)であれば主に上面が画像に現れる)。そのため、その物体が立体的か平坦かに関わらず、その全形が表れても、カメラ近くに存在する場合と比較すると明暗の差は少なくなる(つまり、輝度分布が集中する傾向が強くなる)。
そこで、本実施の形態では、或る物体を示す画素の輝度分布が分散する傾向が強いカメラ近くの領域を輝度算出領域設定部60により輝度算出領域として設定し、当該輝度算出領域に障害物候補領域が重なる場合にその障害物候補領域内に含まれる一部または全部の画素の輝度を輝度算出部70により算出することにした。輝度算出領域は、ダンプトラック(作業機械)の側面から外側(作業機械から離れる方向)に向かって所定の距離に含まれる領域となる。この所定の距離は、各カメラ6a,6b,6c,6dの設置高さ、各カメラ6a,6b,6c,6dのレンズ歪み、及び各画像20a,20b,20c,20d内における各カメラ6a,6b,6c,6dからの距離(これらをカメラパラメータと称することがある)の少なくとも1つに基づいて変化する。
図6の例における輝度算出領域は、入力画像20aにおけるカメラ近くの領域60a、入力画像20bにおけるカメラ近くの領域60b、入力画像20cにおけるカメラ近くの領域60c、入力画像20dにおけるカメラ近くの領域60dである。
輝度算出領域設定部60による輝度算出領域60a,60b,60c,60dの設定方法としては、各入力画像20a,20b,20c,20dに対して、オペレータがマウス等の入力装置を操作して手動入力するものがある。また、上記のカメラパラメータの少なくとも1つに基づいて自動的に設定する方法もある。しかし、適切な輝度算出領域が設定可能な方法であれば上記2つの方法以外の他の方法も利用可能である。また、各入力画像20a,20b,20c,20dで異なる形状(図6の矩形に限らず閉じた図形であれば他の図形でも良い)の輝度算出領域を異なる位置に設定しても良い。輝度ムラが存在し易い領域を輝度算出領域として設定すれば、障害物の検出精度を向上できる。
障害物候補領域抽出部50は、4台のカメラ6a,6b,6c,6dで撮影されたダンプトラック1の周囲の画像20a,20b,20c,20dの特徴量に基づいて、その画像20a,20b,20c,20dの中で障害物が含まれる可能性がある領域(障害物候補領域(第1領域))を抽出する処理(障害物領域抽出処理)を実行する部分である。
図7は本実施の形態の作業機械の周囲監視装置に係る障害物候補領域抽出部50で実行される処理のフローチャートの一例である。図示した処理が開始されると、まず、ステップS51において、4つの入力画像20a,20b,20c,20dのいずれかを選択し、その画像の輝度値から昼夜判定処理を行い、ステップS52において昼間か否かを判定する。昼間と判定された場合、ステップS53で昼間用の平滑化パラメータ設定を行い、昼間でないと判定された場合(すなわち夜間であると判定された場合)、ステップS54で夜間用の平滑化パラメータ設定を行う。次に、ステップS55では、S53又はS54で設定したパラメータに基づいて平滑化処理を画像に行うことでノイズを低減し、その平滑化処理後の画像に対して、ステップS56で輪郭(エッジ)を抽出する輪郭処理を行う。ステップS57では、ステップS56で輪郭を抽出した画像に対して、所定の閾値で2値化処理を施して2値画像を作成し、その2値画像中の図形(輪郭)に対して膨張及び収縮等の整形処理を行う(ステップS58)。
また、ステップS56,S57,S58と並行して、ステップS55の平滑化処理後の画像に対してコーナー点を検知するコーナー点検知処理を行う(ステップS59)。
ステップS60では、ステップS58で作成した輪郭画像とステップS59のコーナー点画像の加算(OR)処理を行い、輪郭とコーナー点が加算された領域が存在する画像を作成する。ステップS61では、ステップS60で作成した画像中の図形の輪郭(エッジ)に基づいて障害物が含まれる可能性がある領域(障害物候補領域)を抽出し、ステップS63で他に未抽出の障害物候補領域が存在せず障害物候補領域の抽出処理が終了したことが確認されたら一連の処理を終了する。
なお、本実施の形態の障害物候補領域抽出部50は、ステップS61において、ステップS60の画像中のエッジに基づいて障害物の可能性のある物体(図形)を抽出し、その物体の外接矩形を障害物候補領域として抽出している。物体の外接矩形を障害物候補領域とすることは一例に過ぎず、例えば当該物体の外接矩形をその中心に向かって所定の大きさだけ縮小したものを障害物候補領域としても良いし、当該物体の内接矩形を障害物候補領域としても良い。
また、上記のステップS51で入力画像の輝度値から昼夜判定処理を行う場合、入力画像全体の輝度値を基準にして判定する方法がある。その他の方法の例としては、入力画像において光の照射されない領域の輝度値を基準にして判定するものもある。輝度値から昼夜判定を行うことに代えて、入力画像の撮影時刻を用いて判定する方法もある。このように本実施の形態では、昼夜が判定できれば特に手法を限定する必要はない。
さらに、図7の例では、エッジ検出処理とコーナー点検出処理を並列して行ったが、エッジとコーナー点の一方が取得できれば本発明は適用可能であるため、エッジとコーナー点の一方が取得できれば一方の処理を実行するだけでも構わない。
次に図7のステップS56からステップS60の処理を実行することにより得られる画像の一部の例について図8および図9を用いて説明する。
図8は、ステップS56からステップS60の処理を入力画像20a中の車90a(図6参照)に適用した場合に得られる画像の模式図である。
ステップS56,57,58で抽出される輪郭(エッジ)は、ソーベル手法やラプラシアン手法等の公知の手法によりエッジを検出した画像に対して、2値化処理(ステップS57)及び整形処理(ステップS58)を施すことにより得られる2値画像中に存在している。例えば入力画像20a中の車90aからは図8に示した複数のエッジ(例えば、エッジS56A、S56B、S56C等)が抽出される。なお、図8の例にはエッジに囲まれた領域の輝度がグレースケールで表示されているが、これは便宜的なものに過ぎず、ステップS56,57,58で得られる実際の画像は図8からエッジのみを抽出した2値画像となる。
また、ステップS59で検知されるコーナー点は、S55で平滑化処理を施した画像に対してハリスの手法等の公知の手法を適用することで検出されるものであり、例えば車90aからは図8に示した複数のコーナー点(例えば、コーナー点S59A、S59B、S59C、‥‥‥、S59Q、S59R)が検出される。なお、図8における各コーナー点は、1点(画素)であるが、説明の都合上、破線を輪郭とする小さい円で示している。また、図8の例では便宜上コーナー点がエッジとともに示されているが、ステップ59で得られる画像は図8からコーナー点のみを抽出した画像となる。
図9は、ステップS56からステップS60の処理を入力画像20a中の地面のしみ90b(図6参照)に適用した場合に得られる画像の模式図である。
この図の例の場合も、ステップS56,57,58の処理により、図8の車90aの場合と同様に複数のエッジ(例えば、エッジS56D、S56E、S56F等)が抽出される。また、ステップS59の処理により、図8の場合と同様に複数のコーナー点(例えば、コーナー点S59S、S59T、S59U、‥‥‥、S59Y、S59Z)が検出される。なお、図8の場合と同様に、ステップS56,57,58で得られる実際の画像は図9からエッジのみを抽出した2値画像となる。また、図9中の各コーナー点は、図8の場合と同様に、破線を輪郭とする小さい円で示している。さらに、図9の例では便宜上コーナー点がエッジとともに示されているが、ステップ59で得られる画像は図9からコーナー点のみを抽出した画像となる。
輝度算出部70は、4つの入力画像20a,20b,20c,20dから障害物候補領域抽出部50が抽出した障害物候補領域(図7のステップ61で得られる領域)のうち、各入力画像20a,20b,20c,20d中に設定された輝度算出領域60a,60b,60c,60dと重なる障害物候補領域の内部に含まれる画素の輝度を算出する部分である。なお、ここにおける「輝度算出領域60a,60b,60c,60dと重なる障害物候補領域」における「重なる」とは、(1)輝度算出領域60a,60b,60c,60dのいずれかに或る障害物候補領域の全部が重なる場合(つまり、輝度算出領域の内部に障害物候補領域が包含される場合)と、(2)或る障害物候補領域の一部が輝度算出領域60a,60b,60c,60dのいずれかと重なる場合の双方を示すものとする。
図10は、障害物候補領域抽出部50によって1以上の障害物候補領域が抽出された場合に、その障害物候補領域が輝度算出部70の輝度算出対象となるか否かを説明するための図である。ところで、輝度算出部70は、図7のフローチャートを経て取得した障害物候補領域を輝度算出に際して参照するが、輝度算出の対象は、入力画像20a,20b,20c,20d中の画素であり、図7のステップS60で作成された2値画像中の画素ではない。つまり、図10の例で説明すれば、入力画像20a上において輝度算出領域60aと重なる外接矩形57,58(障害物候補領域)に含まれる画素の輝度が算出される。ただし、輝度算出の対象とする入力画像20a,20b,20c,20dとして、図7のステップS51〜S55の平滑化処理を施した入力画像20a,20b,20c,20dを利用しても良い。
既述の通り、図7のステップS61において障害物候補領域抽出部50は、複数の輪郭とコーナー点により定義される領域の外接矩形を障害物候補領域として抽出する。図10の入力画像20aでは、外接矩形57(車90aの外接矩形)と外接矩形58(地面のしみ90bの外接矩形)と外接矩形55(車90cの外接矩形)と外接矩形56(地面のしみ90dの外接矩形)の4つが障害物候補領域として抽出されている。このうち外接矩形57と外接矩形58は輝度算出領域60aの内部に存在しているが、残りの外接矩形55と外接矩形56は輝度算出領域60aと共通領域が存在せず、輝度算出領域60aの外部に存在している。
これにより、カメラ近くに位置して輝度算出領域60aとの共通領域が存在する外接矩形57(車90aの外接矩形)と外接矩形58(地面のしみ90bの外接矩形)に限定して輝度算出部70が輝度算出処理を行い、これにより各外接矩形57,58の輝度ヒストグラムの集中度特徴の検討が行われる。
図11は、図10の入力画像20a上で外接矩形57(車90aの外接矩形)内に含まれる画素の輝度を模式的に示した図である。
カメラ近くに存在する障害物(立体物の車90a)はその上部から撮影されるため、図11に示すように、その障害物の全形が表れ、かつ、その上部が明るく下部が暗く表れることが少なくない。図11の例では、車90aを構成する画素の集合は、車90aに係る複数のエッジによって複数の閉領域70A〜70Kに分割されており、各領域70A〜70Kに含まれる画素は同じ輝度(明るさ)を有している。各領域の明るさの特徴としては、車の上部に位置する領域70A,70Bは明るく、車の側面に位置する領域70C,70D,70E,70Fはやや明るく、車の下部に位置する領域70G,70H,70Iは暗く、車のタイヤ部に該当する領域70J,70Kが最も暗くなっている。
これより、領域70Aや70Bは明るいため輝度値が大きく、領域70Cや70Dや70Eや70Fは、領域70Aや70Bよりやや暗いため、輝度値がやや小さくなる。また、領域70G、70H、領域70I、70C等よりも暗いため、輝度値は更に小さくなり、領域70J、70Kのタイヤの部分は更に輝度値が小さくなる。従って、車90aに関しては輝度の分布が4階調の分布となり、外接矩形57における車90aの外側の背景部分70Lの1階調も加えると、外接矩形57の内部全体では輝度の分布が5階調の分布となる。
図12は、外接矩形57(車90aの外接矩形)を構成する画素に関して、横軸45に階級として輝度、縦軸46に度数として画素数をとったヒストグラム(本稿で輝度ヒストグラムと称することがある)を示す図である。なお、図11の例では輝度は5階調しか存在しないため各輝度値を階級としたが、輝度値が広域に亘る場合には階級数が適切な値に収まるように階級間隔を適宜定めてヒストグラムを作成することが好ましい(後述のヒストグラムについても同様)。
図12に示すヒストグラムは、5本の柱72,73,74,75,76によって構成されている。柱72(輝度値は70V1)は、図11におけるタイヤの部分の最も輝度値が小さい領域70J、70Kの画素の合計値、柱73(輝度値は70V2)は、暗い車の下部の領域70G、70H、70Iの画素の合計値、柱74(輝度値は70V3)は、やや明るい車の側面の領域70Cや70Dや70Eや70Fの画素の合計値、柱75(輝度値は70V4)は、明るい車の上部の領域70Aや70Bの画素の合計値、柱76(輝度値は70V5)は、背景部分70Lの画素の合計値となっている。
これより、車90aの外接矩形57の全体に含まれる画素の輝度分布71により5個のピーク部が発生し、輝度ヒストグラムの集中度が低い(分散している)傾向があることが分かる。なお、図12中の輝度分布71は、5本の柱72,73,74,75,76を線グラフに変換したものを平滑化したものである(後述する図14の輝度分布77も同様)。
図13は、図10における外接矩形58(地面のしみ90bの外接矩形)内に含まれる画素の輝度を模式的に示した図である。
この図に示すように、地面のしみ等の外乱は、入力画像中にその全形が表れても、地面と同じく略平坦であり一様に光が当たるため全体的に輝度(明るさ)が比較的均一となる。図11に示したしみ90bは黒いしみであり、しみ90bに係る複数のエッジによって閉領域70Mが形成されており、その領域70Mに含まれるしみを構成する画素は均一の小さい輝度値を有している。従って、しみ90bに関しては輝度の分布が1階調の分布となり、外接矩形58におけるしみ90bの外側の背景部分70Nの1階調も加えると、外接矩形58の内部全体では輝度の分布が2階調の分布となる。
図14は、外接矩形58(地面のしみ90bの外接矩形)を構成する画素に関して、横軸45に階級として輝度、縦軸46に度数として画素数をとったヒストグラムを示す図である。
この図のヒストグラムは2本の柱78,79によって構成されている。柱78(輝度値は70V6)は、図13におけるしみの内部の領域70Mの画素の合計値、柱79(輝度値は70V5)は、図13における背景部分70Nの画素の合計値となっている。これより、しみ90bの外接矩形58の全体に含まれる画素の輝度分布77により2個のピーク部が発生し、輝度ヒストグラムの集中度が高い(画素の輝度が分布している輝度値又は輝度範囲が比較的少ない)傾向があることが分かる。
障害物検知部90は、輝度算出部70で輝度が算出された障害物候補領域(先述の例では外接矩形57,58)の輝度分布の傾向に基づいてその障害物候補領域内の障害物の有無を検知する処理を実行する部分である。本実施の形態では、「輝度分布の傾向」を把握する1つの指標として、輝度算出部70により取得した輝度分布に現れるピークの数を利用している。
図19は、本実施の形態の作業機械の周囲監視装置に係る輝度算出部70及び障害物検知部90で実行される一連の処理のフローチャートの一例である。図示した処理が開始されると、まず、ステップS92において、輝度算出部70は、障害物候補領域抽出部50により抽出された障害物候補領域が、輝度算出領域設定部60で設定した輝度算出領域と重なりがあるか判定を行う。
ステップS92で重なりが存在しない場合、障害物候補領域は輝度算出領域外に存在するため、ステップS101の処理終了判定へ進む。一方、ステップS92で重なりが存在した場合、輝度算出部70は、ステップS93で、輝度算出領域に重なる障害物候補領域の内部に含まれる画素の輝度ヒストグラムを、障害物候補領域ごとに算出する。つまり、輝度算出領域に重なる障害物候補領域が複数存在する場合には、各障害物候補領域に対応する輝度ヒストグラムが算出される。
障害物検知部90は、ステップS94で、ステップS93の輝度ヒストグラムにおける輝度の集中度をチェックし、ステップS95で、その輝度ヒストグラムの輝度分布が幅広い輝度に分散しているか否かの判定を行う。なお、ステップS93の輝度ヒストグラムが複数存在する場合には輝度ヒストグラムごとに判定を行う。
S95の判定に関して、本実施の形態では、ステップS93の輝度ヒストグラムの輝度分布(例えば図12,14の輝度分布71,77)に対して度数が所定の閾値F以上の部分のみを抽出し、その抽出した輝度分布に表れる塊(輝度のピーク)の数が所定の閾値Cを超える場合に「その輝度ヒストグラムの輝度分布は分散している」と判定している。判定に際して閾値Fを超える部分のみを抽出することで、ノイズ的に表れている度数の少ない輝度が捨象され、ピークとして表れている輝度のみに輝度分布の判定対象を限定できるというメリットがある。次に、ステップS93で先述の図12及び図14の輝度ヒストグラム(つまり入力画像20aにおける車90aとしみ90bの輝度ヒストグラム)が算出されたことを前提として、この判定の具体的な方法について説明しつつ、ステップS95,96,S100を説明する。
図20は、車90aの輝度ヒストグラム(図12の輝度分布71)について度数が閾値F以上の輝度分布を示した図である。図12における輝度分布71に対して度数がF未満の部分を除外すると、図20に示すように、ハッチングを施した5個の塊(ピーク)S95a、S95b、S95c、S95d、S95eが算出できる。閾値C=4のとき、図20の場合には塊の数(=5)が閾値C(=4)を超えるので、図19のステップS95で障害物候補領域(外接矩形)57の輝度ヒストグラムの輝度分布は分散していると判定され、障害物検知部90は、ステップS96で障害物候補領域57内に障害物が存在すると判定する。
一方、図21は、地面のしみ90bの輝度ヒストグラム(図14の輝度分布77)について度数が閾値F以上の輝度分布を示した図である。図14における輝度分布77に対して度数がF未満の部分を除去すると、図21に示すように、ハッチングを施した2個の塊(ピーク)S95f、S95gが算出できる。閾値C=4のとき、図21の場合には塊の数(=2)が閾値C以下なので、図19のステップS95で障害物候補領域(外接矩形)58の輝度ヒストグラムの輝度分布は分散していない(集中している)と判定され、障害物検知部90は、ステップS100で障害物候補領域58内に障害物が存在しないと判定する。
図19の説明に戻り、ステップS96で障害物が存在すると判定したら、障害物検知部90は、ステップS97でその障害物が移動物体か否かを判別するために追跡を開始する。ステップS98では、その障害物を所定回数追跡できたか否かを判定し、所定回数追跡できた場合にはステップS99でその障害物が移動物体であり、注意を要する物体であることを検知する。一方、ステップS98で所定回数追跡できない場合には、ステップS92に戻る。
ステップS98において、所定回数追跡できない場合とは、例えば、所定回数過去の入力画像にさかのぼって、その障害物の移動した距離が閾値以下(静止は、移動距離が0)の場合とする。これにより、移動しない障害物(例えば、同一場所で揺れている旗や草木等)が報知されることを防止でき、特に注意を要する移動物体のみを検知の対象とすることができる。ただし、本実施の形態の最たる特徴は平面的な物体を障害物候補対象から除外することが目的であるため、ステップS97,S98,S99の処理は省略して、ステップS96の結果のみに基づいて障害物の検知を行っても構わない。
ステップS99が完了したら、最後にステップS101で処理終了の判定を行い、終了しない場合にはステップS92に戻り処理を続行する。
以上の一連の処理により、本実施の形態に係る作業機械の周囲監視装置は、障害物候補領域内に障害物が存在するか否かを検知する。この障害物の検知結果は表示装置(報知部)100に出力され、表示装置100を介してダンプトラック1の運転者や管理者等に対して報知される。
なお、S95の判定に関して、上記で説明したものに代えて、S93の輝度ヒストグラム(複数の柱で表したグラフ)において度数が所定の閾値F以上の輝度(階級)の数に基づいて行い、当該輝度の数が所定の閾値Cを超える場合に「その輝度ヒストグラムの輝度分布は分散している」と判定しても良い。また、輝度ヒストグラムにおける階級を、上記の例のように或る輝度値ではなく、ある輝度範囲で分類した場合も同様である。ただし、各場合で閾値F,Cの具体的な値は異ならせても良い。また、上記の例では、閾値Cを超える場合を「分散している」と判定したが、これに代えて閾値C以上の場合を「分散している」と判定するように変更しても良い。要は、或る閾値Cを基準にして判定を行えば良い。
既述の通り、障害物となり得るある程度の高さを有する立体的な物体(例えば、車両)は、光(日光や照明等)が当たったときに当該光の当たる場所と当たらない場所が発生するため輝度分布が分散する傾向がある(輝度ムラが生じる傾向がある)。他方、障害物になり難いほぼ高さの無い物体(例えば、水溜まり・雪溜まり、地面上のシミ等)は略一様に光が当たるので輝度分布が集中する傾向がある。上記のように構成した周囲監視装置によれば、画像の特徴量に基づいて障害物を含む可能性があると判定された領域(障害物候補領域(第1領域))の内部の画素の輝度を輝度算出部70により算出することで、その領域(障害物候補領域)の輝度分布を把握することができる。そして、当該輝度分布に分散傾向が見られれば、当該領域に障害物が存在すると判定でき、他方、当該輝度分布に集中傾向が見られれば、当該領域に障害物は存在しないと判定できる。したがって、本実施の形態によれば、障害物が含まれる可能性の有る領域(障害物候補領域)の輝度分布を把握することにより、非障害物を障害物と誤認識する頻度(回数)を低減でき、その結果として障害物検知精度を向上できる。すなわち、ダンプトラック1の周囲を撮影した画像内に存在する水溜りやしみ等を障害物ではないと容易に認識できるので、非障害物を障害物と誤認識することの防止と障害物検知精度の向上が可能となる。
また、本実施の形態の処理では、作業機械の周辺を撮影した1枚の画像が存在すれば、その画像中に障害物が存在するか否かを検知することができる。つまり、ある場所の障害物の検知を単眼カメラの画像(静止画)で行うことができるという点もメリットとなる。
さらに、作業機械が鉱山で利用される場合には、鉱物に由来する色(例えば、鉄鉱石採掘現場では、鉄鉱石特有の赤茶色)が地表に表れることもあるが、本実施の形態では、画像の色を障害物候補を抽出する際の特徴量として用いないため、鉱山などの地面に不規則な色の変化が現れる場所で利用しても、作業機械の周囲の障害物検知に支障をきたすことがない。
上記の説明では、輝度算出領域と重なる障害物候補領域に含まれる全ての画素の輝度を算出して障害物検知を行ったが、輝度算出領域と重なる障害物候補領域に含まれる一部の画素の輝度を算出して障害物検知を行っても良い。次にその場合の一例について説明する。
図15は、図10の入力画像20a上で外接矩形57(車90aの外接矩形)内に含まれるコーナー点周辺の画素の輝度を模式的に示した図である。
本実施の形態における輝度算出部70は、輝度ヒストグラムを算出するために、図7のフローにおけるステップS59で検知された複数のコーナー点(例えば、図8及び図9のコーナー点S59A,S59B,S59S,S59T等)のそれぞれを基準として設定した複数の所定の領域(コーナー周辺領域と称することがある)に含まれる画素の輝度を算出して輝度ヒストグラムを取得する。
本実施の形態におけるコーナー周辺領域は、ステップS59で検知された各コーナー点を中心とし所定の半径を有する円であり、輝度算出部70は、各円の内部に含まれる画素の輝度から輝度ヒストグラムを取得する。
図15には、ステップS59で検知された18個のコーナー点(図8参照)に対応する18個のコーナー周辺領域が示されている。コーナー周辺領域S59AAは、図8に示したコーナー点S59Aに対応するものであり、コーナー周辺領域を領域S59BBは、コーナー点S59Bに対応するものである。残りのコーナー周辺領域S59CC〜S59RRの符号は、これと同様のルールで付されている。各コーナー周辺領域S59AA〜S59RRの内部に含まれる画素の輝度値(輝度値70V1、‥‥、70V5)は図8及び図11と同様にグレースケールで示した。
図16は、図15中のコーナー周辺領域S59AA〜S59RRに含まれる画素の輝度ヒストグラムを示した図であり、5本の柱81、82,83,84,85によって構成されている。図16のグラフの下方において、各柱81、82,83,84,85を構成する画素がどのコーナー周辺領域に属するかを示している。例えば、柱81(輝度値70V1)は、3個の領域S59HH,S59II,S59JJの部分領域によって構成されており、柱82(輝度値70V2)は、10個の領域S59DD,S59EE,S59FF,S59GG,S59HH,S59II,59JJ,S59KK,S59QQ,S59RRの部分領域によって構成されている。
図16から明らかなように、車90aに係るコーナー周辺領域に含まれる画素の輝度分布80にも図12の場合と同様に5個のピーク部が存在し、輝度ヒストグラムの輝度分布が分散している傾向があることが分かる。なお、図16中の輝度分布80は、図12等の場合と同様に5本の柱81,82,83,84,85を線グラフに変換したものを平滑化したものである(図18の輝度分布88も同様)。
図17は、図10の入力画像20a上で外接矩形58(しみ90bの外接矩形)内に含まれるコーナー点周辺の画素の輝度を模式的に示した図である。この図には、ステップS59で検知された8個のコーナー点(図9参照)に対応する8個のコーナー周辺領域S59SS〜S59ZZが示されている。各コーナー周辺領域S59SS〜S59ZZの符号は図15の場合と同じルールで付されている。各コーナー周辺領域S59SS〜S59ZZの内部に含まれる画素の輝度値(輝度値70V5、70V6)は図9及び図12と同様にグレースケールで示した。
図18は、図17中のコーナー周辺領域S59SS〜S59ZZに含まれる画素の輝度ヒストグラムを示した図であり、2本の柱86、87によって構成されている。図18のグラフの下方には、図16と同様に、各柱86、87を構成する画素がどのコーナー周辺領域に属するかを示した。図18から明らかなように、しみ90bに係るコーナー周辺領域に含まれる画素の輝度分布88にも図14と同様に2個のピーク部が存在し、輝度ヒストグラムの輝度分布が集中している傾向があることが分かる。
画像の特徴パターンの1つであるコーナー点の周囲には、その性質上、輝度の異なる画素がエッジに比して集中し易い。そこで本実施の形態においては、障害物候補領域内に含まれるコーナー点を抽出し、その抽出した各コーナー点を基準とした所定の領域(コーナー周辺領域)に含まれる画素の輝度を算出することとした。このように周囲監視装置を構成すると、輝度を算出する画素数を低減しても障害物検出精度を維持できる。
なお、コーナー周辺領域は、コーナー点を基準とした閉領域であれば足りるので、上記の円以外の図形で定義しても良い。
次に、上記の作業機械の周囲監視装置による障害物の検知結果を表示装置100に表示する場合の表示例について図面を用いて具体的に説明する。
図22は、本発明の作業機械の周囲監視装置に係る障害物検知部90により検出された障害物(車)90aを表示装置100に俯瞰画像110で表示した画面の一例を示す図である。図22は、ダンプトラック1の前部を上側に表示しており、運転室7はダンプトラック1の左上の位置に表示される(図23も同様)。
この図の例では、ダンプトラック1の周囲から遠方の距離(約12m程度)まで表示領域に広げて表示装置100に表示している。この図では、入力画像20aを変換した部分俯瞰画像20aaと、入力画像20bを変換した部分俯瞰画像20bbと、入力画像20cを変換した部分俯瞰画像20ccと、入力画像20dを変換した部分俯瞰画像20ddとを合成してダンプトラック1を中心とした俯瞰画像110が作成されている。各部分俯瞰画像20aa,20bb,20cc,20ddには、輝度算出領域60a,60b,60c,60dが設定・表示されている。
図22では、画像20aa内の輝度算出領域60aに車90aとしみ90bが存在し、障害物検知部90が車90aを障害物として検出し、ダンプトラック1に障害物が存在していることを示す警告表示190が表示画面110上に表示されている。なお、表示装置100の中央部に表示した図形は、ダンプトラック1を示しており、図示したもの以外にもダンプトラック1を示すものであれば他の図形を表示しても良い。
図22中の警告表示190は、障害物の外形に略接するように規定された星マークであり、表示装置100の画面上に表示された警告表示190により運転員は障害物の接近を容易に認知できる。警告表示190の形状は、星マーク以外の図形でも良く、図形に色を付しても良いし、時間とともに形状や色を変化させても良い。
図23は、本発明の作業機械の周囲監視装置に係る障害物検知部90により検出された障害物(車)90aを表示装置100に俯瞰画像110Aで表示した画面の一例を示す図である。この図の例では、ダンプトラック1の周囲から比較的近距離(約5m程度)の範囲に俯瞰画像110Aの表示領域を限定して表示装置100に表示している。
図22及び図23に示すように、ダンプトラック1の周囲に俯瞰表示で障害物を表示すると、運転員は運転室7からの方向感覚と違和感のない感覚で前後左右の状況を把握することが可能であり、障害物の存在を瞬時に認識できる。
図24は表示装置100の表示画面の一例を示す図である。この図の例は、画像合成部35で合成された俯瞰画像110と、後方カメラ6cで撮影されたそのままの画像(スルー画像)111とを並列して表示した例であり、俯瞰画像110ではダンプトラック1の前部が上側に表示されており、運転室7がダンプトラック1の左上に表示されている。後方カメラ6cによるスルー画像111を表示することにより、運転員は見慣れたカメラ画像に基づいて違和感なく後方の障害物(車両90e)を判別できる。図示した例では俯瞰画像110とスルー画像111の双方に警告表示190が表示されており、運転員は車両105の接近を容易に把握できる。
図25は表示装置100の表示画面の一例を示す図である。この図の例は、画像合成部35で合成した俯瞰画像112に関して、ダンプトラック1の周囲から比較的近距離(約5m程度)の範囲を表示装置100に表示している。ダンプトラック1を示す図形1aは、表示範囲に追随して図24の場合よりも大きく表示されており、ダンプトラック1aの前部は画像中の右側に表示され、運転室7は表示画面の右上に表示されている。表示範囲をダンプトラック1の近くに限定しており、ダンプトラック1の近くに存在する障害物(車両90e)が大きく表示されるので、運転員はダンプトラック1の近くに存在する最も危険な障害物を明瞭に判別できる。
図26は表示装置100の表示画面の一例を示す図である。この図の例は、画像合成部35で合成した俯瞰画像113に関して、ダンプトラック1の周囲から中距離(約8m程度)の範囲を表示装置100に表示している。ダンプトラック1を示す図形1bは、表示範囲に追随して図25の場合よりも小さく表示されている。表示範囲を中距離に設定すると、運転員はダンプトラック1から中距離の位置に存在する障害物(車両90e)まで判別できる。
図27は表示装置100の表示画面の一例を示す図である。この図の例は、画像合成部35で合成した俯瞰画像114に関して、ダンプトラック1の周囲から遠距離(約12m程度)の範囲を表示装置100に表示している。ダンプトラック1を示す図形1cは、表示範囲に追随して図26の場合よりも小さく表示されている。表示範囲を遠距離に設定すると、運転員はダンプトラック1から遠距離の位置に存在する障害物(車両90e)まで判別できる。
図28は表示装置100の表示画面の一例を示す図である。この図の例は、右側方カメラ6bのスルー画像116と左側方カメラ6dのスルー画像115を並列に表示している。このように左右のスルー画像116,115を表示すると、ダンプトラック1の左右に存在する障害物の判別が容易になるので、ダンプトラック1が左右旋回する場合等の障害物発見が容易になる。
図29は表示装置100の表示画面の一例を示す図である。この図の例は、後方カメラ6cのスルー画像117を表示している。このように後方のスルー画像117を表示すると、ダンプトラック1の後方に存在する最も発見の難しい障害物の発見が容易になる。
図30は本発明の作業機械の周囲監視装置の全体構成のその他の例である。図3と同じ部分については同じ符号を付して説明を省略する。図30において、画像記憶部30は、作業機械の起動時に画像入力部20からの画像を一旦入力したら、これ以降は作業機械稼働データ202に基づいて得られる作業機械の稼働状況をチェックし、作業機械が停止中でない場合(稼働中の場合)には画像入力部20から画像を入力し、作業機械が停止中の場合には画像入力部20からの画像の入力を中断する。これにより、作業機械の稼働状況に応じて異なるサンプリング間隔で画像入力部20から画像をサンプリングすることが可能になる。これにより、必要最低限の入力画像に基づいて障害物検知を行えばよく、処理の適正化が図れる。
なお、画像記憶部30による作業機械稼働データ202に基づいた上記処理を行わない場合には、一定のサンプリング間隔で画像入力部20からの画像をサンプリングすれば良い。
ところで、上記の説明では、障害物検知部90によって障害物が検知されたことを報知する報知装置(報知部)の役割を表示装置100が果たしているが、障害物報知の方法としては、音声を発生する音声装置や警告灯等、公知の報知装置の利用が可能である。
また、上記では、障害物検知部90の障害物の検知結果を運転者や管理者に対して報知することを前提とするシステム構成の説明をしたが、障害物の検知結果をトリガーとしてダンプトラック1が所定の目的の動作をするように制御しても良い。例えば、障害物が検知された場合に、当該障害物を回避する動作を行うようにダンプトラック1を制御しても良い。当該制御はダンプトラック1が自律走行している場合に特に有効となる。
ところで、既述のように本発明の適用対象はダンプトラックに限定されず、他の作業機械にも適用可能である。図31は、本発明の適用対象である作業機械の1つであるいわゆるローダタイプの大型油圧ショベルの側面図である。この油圧ショベルは、下部走行体155と、この下部走行体155の上部に旋回台軸受け157を介して旋回可能に設けた上部旋回体156と、この上部旋回体156に俯仰動可能に連結された多関節型のフロント作業機158とを備えている。多関節型のフロント作業機158に備えられたバケット152が接地状態で開口部が前方側へ向くように配置され、バケット開閉シリンダ164がバケット152に図示するように装設されている。また、ブームシリンダ161、バケットシリンダ162、アームシリンダ163、及びバケット開閉シリンダ164がそれぞれ伸縮動作によりブーム上げ/下げ、アーム押し/引き、バケットクラウド/ダンプ、バケット閉止/開放を行うようになっている。このように構成された油圧ショベルに複数台のカメラ(例えば図中のカメラ6a,6c,6d)及び画像処理装置10をはじめとした上記の各構成を搭載すれば、上記のダンプトラック1の場合と同様に周囲監視装置を構成することができる。
なお、上記の例では、輝度算出部70の算出結果に基づいて作成したヒストグラムから障害物の検知を行ったが、ヒストグラムに代えて、横軸に輝度値、縦軸に画素数をとったグラフに算出結果をプロットし、その結果に基づいて障害物の検知を行っても良い。さらに各種のグラフに変換することなく数値ベースで輝度分布の分散の程度を把握し障害物検知を行っても良い。
ところで、上記では、画像処理装置10及び表示装置100をダンプトラック1(作業機械)に搭載する場合について説明したが、これは一例に過ぎず、画像処理装置10及び表示装置100の設置場所は当該画像処理装置に画像を出力するカメラ6が搭載された作業機械に限定されない。例えば、画像処理装置10における画像入力部20、画像記憶部30、画像合成部35、障害物候補領域抽出部50、輝度算出領域設定部60、輝度算出部70、及び障害物検知部90は、少なくとも図3において通信線で接続されたもの同士が通信可能に構成すれば、その設置場所に限定は無い。また、同様にカメラ6からの画像が入力可能であれば画像入力部20はカメラ6と異なる場所に設置しても良く、障害物検知部90は表示装置(報知部)100に障害物検知結果を出力可能であれば表示装置100と異なる場所に設置しても良い。
また、上記では、1台のダンプトラック(作業機械)のカメラ画像を基にそのダンプトラックの周囲の監視を行うシステム構成について説明したが、管制センタ等に設置した画像処理装置10に対して複数のダンプトラックのカメラ画像を出力し、その画像処理装置10で各ダンプトラックの周囲監視を集中管理するシステムを構成しても良い。すなわち、1台の画像処理装置の処理対象は1台の作業機械のカメラ画像に限らない。また同様に1台の画像処理装置から複数の表示装置100に対して障害物検知結果を出力しても良い。
なお、本発明は、上記の各実施の形態に限定されるものではなく、その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば、本発明は、上記の各実施の形態で説明した全ての構成を備えるものに限定されず、その構成の一部を削除したものも含まれる。また、ある実施の形態に係る構成の一部を、他の実施の形態に係る構成に追加又は置換することが可能である。
また、上記の画像処理装置に係る各構成や当該各構成の機能及び実行処理等は、それらの一部又は全部をハードウェア(例えば各機能を実行するロジックを集積回路で設計する等)で実現しても良い。また、上記の画像処理装置に係る構成は、演算処理装置(例えばCPU)によって読み出し・実行されることで当該画像処理装置の構成に係る各機能が実現されるプログラム(ソフトウェア)としてもよい。当該プログラムに係る情報は、例えば、半導体メモリ(フラッシュメモリ、SSD等)、磁気記憶装置(ハードディスクドライブ等)及び記録媒体(磁気ディスク、光ディスク等)等に記憶することができる。