以下、実施形態の配達支援装置、及び配達支援プログラムを、図面を参照して説明する。
(第1の実施形態)
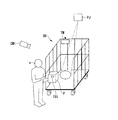
図1は、配達支援システム1の概要図である。配達支援システム1は、小包などの配達対象物Pを、宛先に応じた区分箇所に区分する際に、配達対象物Pを運搬する作業者を支援するシステムである。本実施形態の配達支援システム1は、副搬送路20と、区分台30と、カメラCMと、投影部PJと、支援装置50とを含んでよいが、これに限定されない。
配達支援システム1の副搬送路20は、分岐機構104を含む主搬送路102に連結されている。主搬送路102は、例えば周回(循環)経路を形成する。主搬送路102は、例えば搬送ベルト、駆動プーリ、および駆動モータを含む。駆動プーリは、駆動モータの駆動により出力される駆動力により回転する。搬送ベルトは、駆動プーリの回転力により駆動されて配達対象物Pを搬送する。駆動モータは、上位装置100の制御に基づいて、搬送ベルトに作用させる搬送力を制御する。駆動モータは、搬送ベルトを任意の速度および加速度で作動させる。
分岐機構104は、主搬送路102と副搬送路20とが連結される付近に配置される。分岐機構104は、主搬送路102において搬送されている配達対象物Pを、副搬送路20に搬出する。分岐機構104は、副搬送路20の搬送方向に駆動される搬送ベルトを備える。この搬送ベルトが副搬送路20に配達対象物Pを搬出する。
上位装置100は、主搬送路102および分岐機構104を制御する。また、上位装置100は、主搬送路102に搬送されている配達対象物Pに関する情報を管理する。また、上位装置100は、主搬送路102に搬送されている配達対象物Pに関する情報に基づいて、分岐機構104を制御して、予め設定された副搬送路20に配達対象物Pを搬出させる。
副搬送路20は、分岐機構104により搬出された配達対象物Pをシュータ28に搬送する。副搬送路20は、搬送ベルトや、駆動プーリ、駆動モータを含む。搬送ベルトは、駆動プーリの回転力により動作して配達対象物Pを搬送する。駆動モータは、支援装置50の制御に基づいて、搬送ベルトに作用させる搬送力を制御する。駆動モータは、搬送ベルトを任意の速度および加速度で搬送する。
副搬送路20には、スライドシューソータ24、およびバッファ部26Aから26Dが設けられる。以下、バッファ部26Aから26Dを区別しない場合は、単にバッファ部26と称する。スライドシューソータ24は、副搬送路20の搬送ベルトの隙間から鉛直上向きに突出したり、搬送ベルトの内側に引っ込んだりする。スライドシューソータ24は、支援装置50の制御に基づいて、配達対象物Pをいずれかのバッファ部26に誘導する。
バッファ部26には、配達対象物Pが一時的に集積(退避)される。バッファ部26は、駆動ローラおよび駆動モータを備える。駆動モータは、支援装置50の制御によって駆動する。駆動ローラは、駆動モータの回転方向および回転速度に基づいて回転する。バッファ部26内の駆動ローラは、副搬送路20の搬送ベルトの回転方向と交差する方向に駆動される。駆動ローラが第1の方向に回転することで、スライドシューソータ24により誘導された配達対象物Pは、バッファ部26の奥側に退避される。駆動ローラが第2の方向に回転することで、バッファ部26に退避された配達対象物Pは、副搬送路20に搬出される。
副搬送路20と、区分台30との間にはシュータ28が連結されている。シュータ28は、副搬送路20から区分台30に向けて配達対象物Pが滑り落ちる勾配を有している。副搬送路20を搬送される配達対象物Pはシュータ28に到達すると、シュータ28の勾配を滑り落ちて区分台30(集積箇所の一例)に移動する。区分台30は、シュータ28を滑り落ちた配達対象物Pが、一時的に置かれる。作業者は、区分台30に置かれた配達対象物Pを、区分先に応じたカゴ車80(積載部の一例)に運搬する。
カメラCMは、例えばシュータ28を滑り落ちる配達対象物Pおよび区分台30に置かれた配達対象物Pを、所定時間間隔で繰り返し撮像する。また、カメラCMは、シュータ28および区分台30の周辺だけでなく、区分台30の周辺に配置されたカゴ車80の周辺を含めて撮像する。カメラCMは、撮像した画像データを支援装置50に供給する。
投影部PJは、例えばスライドプロジェクタである。投影部PJは、支援装置50の指示に基づいて、シュータ28または区分台30に存在する配達対象物Pに向けて複数の色彩画像を切り替えて投影する。なお、配達支援システム1は、複数の投影部PJを含んでもよい。また、投影部PJは、異なる色の光を切り替えて配達対象物Pに照射するライト(照射部)であってもよい。作業者は、投影部PJにより配達対象物Pに投影された画像に基づいて、区分台30において配達対象物Pを移動させたり、配達対象物Pに対応する区分先のカゴ車80に配達対象物Pを載せたりする。
カゴ車80は、配達先が同じ区分先に属する配達対象物Pが積載され、移動可能な配達補助具である。カゴ車80は、配達対象物Pが積載された状態で、トラック等の移動体に載置され、別の場所に運搬される。
図2は、支援装置50の構成図である。支援装置50は、通信インターフェース52と、データ管理部54と、搬送制御部56と、画像認識部58と、位置特定部60と、制御部62と、記憶部70とを含んでよいが、これに限定されない。データ管理部54と、搬送制御部56と、画像認識部58と、位置特定部60と、制御部62とは、CPU(Central Processing Unit)などのプロセッサがプログラムを実行することで実現されてもよい。また、これらの機能部(回路部)のうち一部または全部は、LSI(Large Scale Integration)やASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)などのハードウェアで実現されてもよい。記憶部70は、例えば、RAM(Random Access Memory)やROM(Read Only Memory)、HDD(Hard Disk Drive)、フラッシュメモリ等の記憶装置により実現される。
通信インターフェース52は、ネットワークNWに接続され、上位装置100と通信する。ネットワークNWは、例えば、LAN(Local Area Network)である。上位装置100は、主搬送路102に搬送されている配達対象物Pに関する情報を、ネットワークNWを介して支援装置50に供給する。
データ管理部54は、上位装置100から取得した配達対象物Pに関する情報を統合し、処理前配達対象物データ72として管理する。また、データ管理部54は、画像認識部58、位置特定部60、および制御部62等により処理された結果を、処理後配達対象物データ74として管理する。データ管理部54は、対応情報76を管理する。処理前配達対象物データ72、処理後配達対象物データ74、および対応情報76の詳細については後述する。
搬送制御部56は、副搬送路20に含まれる駆動モータおよび搬送ベルトを制御して、配達対象物Pが搬送される速度を調整する。
画像認識部58は、カメラCMによって撮像された画像の画像データに対して認識処理を行う。
位置特定部60は、画像認識部58の認識結果、その他の情報に基づいて、データ管理部54が取得した配達対象物Pの識別情報に対応する位置を特定する。
制御部62は、負荷推定部64と、投影制御部66と、バッファ制御部68とを含む。負荷推定部64は、画像認識部58の認識結果を解析し、区分先ごとの作業者の負荷を推定する。
投影制御部66は、位置特定部60により特定された配達対象物Pの位置、およびデータ管理部54により取得された配達対象物Pの区分先に基づいて、投影部PJに、区分先を示す情報を作業者に提示させる。
バッファ制御部68は、バッファ部26の駆動ローラおよび駆動モータを制御する。また、バッファ制御部68は、スライドシューソータ24を制御する。バッファ制御部68は、負荷推定部64により推定された作業者の負荷に対応する区分先を有する配達対象物Pを、優先的にバッファ部26に退避させる。バッファ制御部68は、バッファ部26に退避させた配達対象物Pを副搬送路20に搬出させる。
図3は、支援装置50により実行される処理の流れを示すフローチャートである。本フローチャートの処理は、データ管理部54が、上位装置100から供給された情報を取得したときに開始される。また、本フローチャートの処理は、配達対象物Pごとに並行して実行される。支援装置50は、上位装置100から当該配達対象物Pに関する情報を取得して、処理前配達対象物データ72に登録する(ステップS100)。
図4は、処理前配達対象物データ72の一例を示す図である。処理前配達対象物データ72は、上位装置100により事前に取得された情報である。処理前配達対象物データ72は、配達対象物Pの識別情報に、配達対象物Pの区分先を示す情報、配達対象物Pが載せられるカゴ車80に関する情報(カゴ車情報)、荷主の情報、配達先の情報、配達対象物Pの大きさ、形状、重量、特性(割れ物、天地無用等)、配達対象物Pが特定の箇所に到達した時刻等が対応付けられて情報である。処理前配達対象物データ72は、上述した情報のうち一部を省略したものであってもよい。
配達対象物Pの区分先は、例えば予め設定された配達先のグループを示す情報である。配達先のグループとは、例えば、郵便番号が共通するなど、一括して運搬するのが適切なグループである。カゴ車80に関する情報は、配達対象物Pが積載されるカゴ車80を識別する情報、またはカゴ車80が配置された位置を識別する情報である。なお、配達対象物Pの区分先またはカゴ車に関する情報は、上位装置100から取得したデータを用いて、配達先と区分先が対応付けられたテーブルを参照し、データ管理部54が導出してもよい。この場合、記憶部70には、配達先、区分先およびカゴ車に関する情報が互いに対応付けられた情報テーブルが記憶されている。
上位装置100から処理前配達対象物データ72を取得すると、搬送制御部56は、搬送されている配達対象物Pの位置の監視を開始する(ステップS102)。位置特定部60は、例えば所定時間間隔で副搬送路20の搬送速度と、配達対象物Pが副搬送路20に載せられた時刻とに基づいて、配達対象物Pの位置を特定する。
次に、データ管理部54は、処理前配達対象物データ72に基づいて、配達対象物Pの区分先を特定する(ステップS104)。次に、位置特定部60が、画像認識部58の認識結果に基づいて、バッファ処理が必要であるか否かを判定する(ステップS106)。バッファ処理とは、搬送されている配達対象物Pを一時的にバッファ部26に退避させる処理である。位置特定部60は、作業者の負荷が高い場合、その作業者に対応付けられた区分先について、バッファ処理が必要であると判定する。位置特定部60は、作業者の負荷が高くない場合、その作業者に対応付けられた区分先について、バッファ処理が不要であると判定する。作業者の負荷を推定する処理の詳細については後述する。
バッファ処理が必要である場合、バッファ制御部68が、スライドシューソータ24およびバッファ部26を制御して、搬送されている配達対象物Pを一時的にバッファ部26に退避させる(ステップS108)。
バッファ処理が不要である場合、カメラCMがシュータ28および区分台30に存在する配達対象物Pを撮像する(ステップS110)。次に、位置特定部60は、シュータ28および区分台30に存在する配達対象物Pを識別するための情報を取得することができたか否かを判定する(ステップS112)。
上位装置100は、例えば、配達対象物Pが主搬送路102から副搬送路20に搬出されるタイミングで、支援装置50に配達対象物Pに関する情報を供給する。位置特定部60は、搬送制御部56から搬送速度を取得しておき、配達対象物Pが主搬送路102から副搬送路20に搬出されてからの搬送速度を考慮して、配達対象物Pがシュータ28または区分台30に到達する時刻を算出する。そして、位置特定部60は、算出した時刻通りに(例えば誤差が所定時間以内に)シュータ28または区分台30に到達したことがカメラCMの撮像画像から認識できた場合に、当該配達対象物Pと、監視していた(上位装置100から供給された情報を取得した)配達対象物Pとの同一性の確からしさが高い、ひいては、当該配達対象物Pの区分先の確からしさが高いと判定する。この場合、位置特定部60は、上位装置100から取得した配達対象物Pに関する情報から、配達対象物Pの識別情報および区分先の情報を特定する。また、位置特定部60は、配達対象物Pがシュータ28または区分台30に到達する時刻においてカメラCMの撮像画像から認識された配達対象物Pの位置を、初期位置として特定する。
また、位置特定部60は、配達対象物Pの大きさや、形状、位置等に基づいて、配達対象物Pの同一性の確からしさを判定してもよい。位置特定部60は、画像認識部58の認識結果に基づいて、例えば配達対象物Pの大きさや、形状、位置等を特定する。例えば、位置特定部60は、上位装置100から取得した配達対象物Pの大きさや、形状、位置等と、位置特定部60により特定された配達対象物Pの大きさや、形状、位置等の合致度が所定度合以上であるか否かを判定する。合致度が所定度合以上である場合、位置特定部60は、監視していた配達対象物PとカメラCMにより撮像された配達対象物Pの同一性が確からしいと判定する。
位置特定部60により処理された情報は、データ管理部54によって処理後配達対象物データ74として管理される。図5は、処理後配達対象物データ74の一例を示す図である。処理後配達対象物データ74には、配達対象物Pの識別情報に、区分先の情報、カゴ車に関する情報、ある時刻における配達対象物Pの位置、角度(向き)、確からしさを示す情報、配達対象物Pの大きさ、形状等が対応付けて記憶される。また、処理後配達対象物データ74には、配達対象物Pの識別情報に対して、配達対象物Pが載せられるカゴ車に関する情報、および上位装置100により指定されたカゴ車80に正しく載せられたか否かを示す情報が対応付けて記憶される。処理後配達対象物データ74は、上述した情報のうち一部を省略してもよい。
配達対象物Pを識別するための情報を取得することができた場合、投影制御部66は、区分先を示す情報を投影部PJに投影させる(ステップS114)。配達対象物Pを識別するための情報を取得することができなかった場合、投影制御部66は、区分先を取得することができなかったことを示す情報を投影部PJに投影させる(ステップS116)。これにより本フローチャートの処理は終了する。
図6は、区分台30の俯瞰図である。区分台30は、例えば、区分台30の長手方向に並べられ、短手方向に沿った軸を中心に回転する複数のローラコンベアを備える。また、ローラコンベアの表面は摩擦係数の低い金属で形成されている。シュータ28を滑り落ちてくる配達対象物Pは、ローラコンベアの回転や、ローラコンベア上の摺動によって、区分台30上を移動する。区分台30は、例えばボールコンベア、ベルトコンベア等により形成されてもよい。
図6に示すように、区分台30は、例えば区分台30の長手および短手を半分に区切って4分割にしたAからDの領域が仮想的に設定されている。AからDの領域は、例えば作業者aからdの作業範囲に、それぞれ対応する。また、AからDの領域は、配達先の集合である区分先に、それぞれ対応する。すなわち、本実施形態では、作業者と区分先は互いに対応している。また、区分台30の周辺には作業者が作業する領域を挟んで複数のカゴ車80が配置されている。支援装置50は、カゴ車80が配置される位置、またはカゴ車80に対して、カゴ車の識別情報1から16を付与して処理を行う。
図7は、対応情報76の一例を示す図である。対応情報は、領域の識別情報に対して、区分台30に設定された領域の範囲や、設定された領域の作業を担当する作業者、区分台30の周辺に配置されたカゴ車80の位置、カゴ車80の位置に対応したカゴ車の識別情報、投影部PJに投影させる色彩の情報、画像の情報等が対応付けられている。対応情報76は、上位装置100から取得されてもよいし、支援装置50が備える入力部(不図示)により入力された情報に基づいて設定されてもよい。例えば、各領域や、カゴ車80が配置される位置は、床面を基準としたXY座標として対応情報76に記憶されている。
投影制御部66は、図3のフローチャートで説明したように、配達対象物Pの位置、区分先、運搬先のカゴ車の情報を取得し、投影部PJに、区分先の情報、およびカゴ車の識別情報を示す画像を配達対象物Pに向けて投影させる。例えば、投影制御部66は、区分先に対応する色彩で、カゴ車の識別情報に対応する数字などの情報を含めた画像を配達対象物Pに投影する。
これにより、作業者は、自身が担当する配達対象物Pを容易に認識することができる。また、配達対象物Pを載せる必要があるカゴ車80を容易に認識することができる。この結果、利便性を向上させることができる。
また、投影制御部66は、位置特定部60により特定された位置を参照し、配達対象物Pが、区分台30における区分先に対応する領域(AからD)に存在する場合と、存在しない場合とで、投影部PJに、異なる情報を作業者に投影させる。異なる情報とは、区分台30における区分先に対応する領域に配達対象物Pが存在する場合に投影される画像とは、異なる態様の画像である。例えば、投影制御部66は、配達対象物Pが区分台30における区分先に対応する領域に配達対象物Pが存在する場合、上記説明した画像をそのまま作業者に投影し、配達対象物Pが存在しない場合、上記説明した画像を点滅表示等(図6、「AT」)させる。
また、支援装置50が配達対象物Pの区分先を取得することができなかった場合、投影部PJは、配達対象物Pに向けて区分先を取得できなかったことを示す情報を投影してもよい。例えば投影部PJは、配達対象物Pに向けてカゴ車を特定する数字などを含まない画像を点滅して投影させたり、区分先が取得できた場合の色彩とは異なる色彩を投影したりする。また、位置特定部60により導出された配達対象物Pの確からしさが低い場合、投影部PJは、確からしさが低いことを示す情報を、該当する配達対象物Pに向けて投影してもよい。これにより、作業者は、配達先の視認が必要な配達対象物Pを認識することができる。
このように投影制御部66は、位置特定部60の処理結果に基づいて、投影部PJが投影する情報を切り替えることで、作業者は区分先の確認が必要である配達対象物Pであることを認識することができる。この結果、作業者が配達対象物Pの区分先を視認して配達対象物Pを仕分けることで、より確実に配達対象物Pが正しいカゴ車80に載せられる。
また、支援装置50が配達対象物Pの区分先を取得することができなかった場合、または配達対象物Pの確からしさが低い場合、投影制御部66は、所定の作業者が担当する区分先の領域に対応する画像を、配達対象物Pに向けて投影部PJに投影させてもよい。ここでの所定の作業者とは、予め設定された作業者であり、例えば処理効率や、技能が高い作業者である。また、所定の作業者とは、負荷推定部64により推定された負荷が最も低い作業者である。これにより、より精度よく、且つ迅速に配達対象物Pを所定のカゴ台車に載せることができる。
[バッファ処理]
図8は、支援装置50により実行されるバッファ処理の詳細について説明するための図である。まず、位置特定部60が、画像認識部58の認識結果に基づいて、区分台30に置かれた配達対象物Pの状態を区分台30に設定された領域ごとに認識する(ステップS200)。
次に、負荷推定部64は、配達対象物Pの区分先に対応する領域の負荷が高いか否かを判定する(ステップS202)。すなわち、負荷推定部64は、作業者の負荷が高いか否かを判定する。図9は、負荷推定部64の判定処理について説明するための区分台30の俯瞰図である。負荷推定部64は、位置特定部60の特定結果に基づいて、区分台30に置かれた配達対象物Pの位置を特定する。図示するように、例えば、負荷推定部64は、区分台30の全体に置かれた、区分先ごとの配達対象物Pの数が第1の閾値以上である場合、或いは、区分先ごとの領域内における配達対象物Pの数が第1の閾値以上である場合などに、当該区分先に対応する作業者の負荷が高いと判定する。例えば、負荷推定部64は、区分台30の全体に置かれた、区分先ごとの配達対象物Pの数に加え、副搬送路20およびシュータ28に存在する配達対象物Pの数を加え、区分先ごとの配達対象物Pの数が第1の閾値以上であるか否かを判定してもよい。
配達対象物Pの区分先に対応する領域の負荷が高い場合、バッファ制御部68が、バッファ部26を制御して、負荷が高い区分先に対応する配達対象物Pを、バッファ部26に退避させる(ステップS204)。配達対象物Pの区分先に対応する領域の負荷が高くない場合、搬送制御部56が、副搬送路20を制御して、対象の配達対象物Pを区分台30に搬送させる(ステップS206)。
次に、負荷推定部64は、配達対象物Pの区分先に対応する領域の負荷が低いか否かを判定する(ステップS208)。例えば、負荷推定部64は、区分台30の全体に置かれた、区分先ごとの配達対象物Pの数が第2の閾値以下である場合、或いは、区分先ごとの領域内における配達対象物Pの数が第2の閾値以下である場合などに、当該区分先に対応する作業者の負荷が低いと判定する。例えば負荷推定部64は、区分台30の全体に置かれた、区分先ごとの配達対象物Pの数に加え、副搬送路20およびシュータ28に存在する配達対象物Pの数を加え、区分先ごとの配達対象物Pの数が第2の閾値以上であるか否かを判定してもよい。
配達対象物Pの区分先に対応する領域の負荷が低くない場合、本フローチャートの処理は終了する。配達対象物Pの区分先に対応する領域の負荷が低い場合、バッファ制御部68が、バッファ部26を制御して、バッファ部26に退避された配達対象物Pを区分台30に搬出させる(ステップS210)。これにより本フローチャートの処理は終了する。
上述した処理により区分先に対応する領域の負荷が高い場合、配達対象物Pはバッファ部26に退避される。また、バッファ部26に退避された配達対象物Pは、退避された配達対象物Pの区分先に対応する領域の負荷が低い場合、区分先に対応する区分台30の領域に搬送され、作業者によりカゴ車80に載せられる。バッファ制御部68が、負荷推定部64により推定された負荷に対応する区分先を有する配達対象物Pを、優先的にバッファ部26に退避させる。この結果、作業者の負荷を均一化させることができる。
なお、バッファ部26は、U字型に配置され、バッファ部26の一端および他端が副搬送路20に連結されてもよい。この場合、バッファ部26の一端から順に配達対象物Pが蓄積され、先入れ先出し(FIFO)の規則で配達対象物Pが副搬送路20に戻される。
[カゴ車への積載確認]
図10は、支援装置50により実行されるカゴ車80への積載確認処理の流れを示すフローチャートである。まず、カメラCMが、区分台30に置かれた配達対象物Pがカゴ車80に載せられる様子を撮像する(ステップS300)。次に、位置特定部60(積載判定部)が、画像認識部58により認識結果に基づいて、配達対象物Pが載せられたカゴ車80を特定する(ステップS302)。位置特定部60は、図3のフローチャートのステップS102において開始した監視を継続することで、カゴ車80に載せられた配達対象物Pを特定する。次に、位置特定部60が、配達対象物Pの区分先に対応するカゴ車80に配達対象物Pが載せられたか否かを判定する(ステップS304)。
配達対象物Pの区分先に対応するカゴ車80に配達対象物Pが載せられた場合、データ管理部54が、カゴ車の識別情報を処理後配達対象物データ74に記憶させる(ステップS306)。配達対象物Pの区分先に対応するカゴ車80に配達対象物Pが載せられていない場合、投影部PJが、所定時間の間、注意を促す情報を誤ったカゴ車80に載せられた配達対象物Pに向けて投影する(ステップS308)。なお、注意を促す情報は、例えば配達支援システム1が備えるスピーカ(不図示)により出力されてもよい。
次に、位置特定部60が、画像認識部58による認識結果に基づいて、配達対象物Pが誤ったカゴ車80に載せられた状態が維持されているか否かを判定する(ステップS310)。配達対象物Pが誤ったカゴ車80に載せられた状態が維持されていない場合、本フローチャートの1ルーチンは終了し、ステップS300の処理に進む。配達対象物Pが誤ったカゴ車80に載せられた状態が維持されている場合、データ管理部54が、配達対象物Pが載せられたカゴ車の識別情報を処理後配達対象物データ74に記憶させる(ステップS312)。これにより本フローチャートの処理は終了する。
このようにデータ管理部54が、カゴ車80およびカゴ車80に積載された配達対象物Pの識別情報を対応付けて処理後配達対象物データ74に記憶させることで、支援装置50は、配達対象物Pが載せられたカゴ車80を特定することができる。
図11は、配達対象物Pがカゴ車80に載せられる様子を示す図である。図11の例では、正しいカゴ車80(識別情報10のカゴ車80)とは異なるカゴ車80(識別情報11のカゴ車)に載せられようとしている。この場合、投影部PJが、対象の配達対象物Pに向けて、区分先に対応するカゴ車80とは異なるカゴ車80に配達対象物Pが載せられようとしていることを示す情報を投影する。これにより、作業者は、配達対象物Pの区分先に対応するカゴ車80とは異なるカゴ車80に配達対象物Pを載せようとしていることを認識することができる。また、データ管理部54が、配達対象物Pが載せられたカゴ車80の情報を処理後配達対象物データ74に記憶させるため、配達対象物Pと、配達対象物Pが載せられたカゴ車80との対応関係を管理することができる。
なお、配達支援システム1は、カメラCMに加えて、更に区分台30に置かれた配達対象物Pがカゴ車80に載せられる様子を撮像するカメラを別体として備えてもよい。この場合、位置特定部60は、配達対象物Pがカゴ車80に載せられる様子を撮像するカメラによって撮像された画像に基づいて、配達対象物Pが載せられたカゴ車80を特定してもよい。
以上説明した第1の実施形態の配達支援システムによれば、支援装置50が配達対象物Pの識別情報および区分先に関する情報を取得し、位置特定部60および位置特定部60が、カメラCMにより撮像された画像に基づいて、取得した識別情報に対応する配達対象物Pの位置を特定し、投影制御部66が、位置特定部60および位置特定部60により特定された位置および上位装置100から取得した区分先に関する情報に基づいて、投影部PJに、区分先を示す情報を作業者に提示させることで、利便性を向上させることができる。
(第1の実施形態の変形例)
以下、第1の実施形態の変形例について説明する。第1の実施形態の変形例は、投影制御部66は、区分先に対応する搬送先(例えば配達対象物Pが載せられるカゴ車80)を示す情報であるオブジェクトを、配達対象物Pに対応付けて投影部PJに投影させる。以下、この相違点を中心に説明する。
投影制御部66は、配達対象物Pから見た搬送先の方向に基づいて、投影部PJが投影するオブジェクトの向きを決定する。「オブジェクト」とは、人が視認することによって指し示す方向が認識できるものであって、例えば図形や記号、数字等を含む。オブジェクトは、作業者が搬送先のカゴ車80、または搬送先のカゴ車80の方向を認識しやすい形態であればよく、環境や、作業者の属性によって、任意に選択することができる。以下の説明では、オブジェクトの一例として搬送先の方向を示す矢印を用いて説明する。
図12は、オブジェクトOBが配達対象物Pに対応付けて投影される場面の一例を示す図である。投影制御部66は、位置特定部60により特定された配達対象物Pの位置と、搬送先(識別情報10のカゴ車80)の位置とに基づいて、投影部PJに、オブジェクトOBを、矢印の向きを搬送先に向けた状態で配達対象物Pに対応付けて、投影対象(配達対象物P)に投影させる。例えば投影制御部66は、その時刻における、XY平面における配達対象物Pの中心と、搬送先であるカゴ車80の中心とを仮想的に結んだ仮想線と矢印の向きが平行になるように、矢印の向きを決定する。これにより、図示するように時刻t、時刻t+1、および時刻t+2のとき、配達対象物Pの位置が変化しても、配達対象物Pに投影される矢印の向きは、それぞれ搬送先のカゴ車80の方向に向くように制御される。また、投影制御部66は、配達対象物P(の中心)が、搬送先の近傍である領域X内に到達した場合、作業者に配達対象物Pの搬送先のカゴ車80が近くに存在することを知らせるために、オブジェクトOBを点滅させたり、オブジェクトOBを投影する画像の色を変更したりしてもよい。この結果、作業者は、矢印の向きを視認することで、直感的に配達対象物Pの搬送先を認識することができる。
投影制御部66は、投影されるオブジェクトOBを、所定周期で変化させてもよい。すなわち、投影制御部66は、いわゆるアニメーション処理を実行してもよい。図13は、配達対象物Pに投影されるオブジェクトOBの一例を示す図である。投影制御部66は、投影部PJに、所定周期でオブジェクトOBを1つずつ増加させながら配達対象物Pに投影させ、所定数まで増加させたら、1つのオブジェクトOBを配達対象物Pに投影させることを繰り返す。例えば、時刻tでは1つのオブジェクトOB、時刻t+1では2つのオブジェクトOB、時刻t+2では3つのオブジェクトOBが投影される。この場合、オブジェクトOBが指し示す方向、およびオブジェクトOBが増加される方向は、搬送先のカゴ車80の方向である。投影制御部66が、投影部PJに投影させるオブジェクトOBは、指し示す方向が視認者によって認識可能であればよい。
図14は、配達対象物Pに投影されるオブジェクトOBの別の一例(1)を示す図である。図15は、配達対象物Pに投影されるオブジェクトOBの別の一例(2)を示す図である。オブジェクトOBは、図14に示すような記号であってもよいし、図15に示すような指で方向を示す図形であってもよい。
また、投影制御部66は、所定周期でオブジェクトOBの位置を変化させてもよい。図16は、配達対象物Pに投影されるオブジェクトOBの別の一例(3)を示す図である。位置の変化とは、例えば、配達対象物Pの上面において、搬送先のカゴ車80に遠い位置から搬送先のカゴ車80の存在する方向の位置への変化である。
また、投影制御部66は、所定周期でオブジェクトOBの大きさや、形状を変化させてもよい。図17は配達対象物Pに投影されるオブジェクトOBの別の一例(4)を示す図である。図17に示すように投影制御部66は、投影部PJに、周期ごとに矢印の長さを変化させて、配達対象物Pに投影させる。例えば、配達対象物Pに投影される矢印の長さは、時刻t、時刻t+1、時刻t+2の順で長くなるように投影される。
上述した例では、所定周期でオブジェクトOBが変化するように制御される場合について説明したが、これに限られない。投影制御部66は、所定周期によらずに、配達対象物Pの位置と、搬送先のカゴ車80の位置との距離に応じて、オブジェクトOBの数や長さ、大きさなどを変更してもよい。例えば、投影制御部66は、配達対象物Pの位置と、搬送先のカゴ車80の位置との距離が長くなる程、オブジェクトOBの数を多く(例えば図13から図15の時刻t+2に示す3つのオブジェクトOBを)投影し、距離が短くなる程、オブジェクトOBの数を少なく(例えば図13から図15の時刻tに示す1つのオブジェクトOBを)投影する。
また、投影制御部66は、配達対象物Pの位置と、搬送先のカゴ車80の位置との距離が長くなる程、図17の時刻t+2で示したようにオブジェクトOBの長さを長くし、距離が短くなる程、図17の時刻tで示したようにオブジェクトOBの長さを短くしてもよい。
なお、オブジェクトOBの変化の形態については、環境や作業者の属性によって、自動的に、或いは手動操作によって任意の形態が選択されてよい。
また、投影制御部66は、処理前配達対象物データ72を参照し、配達対象物Pの重量、特性(割れ物、天地無用等)によって、オブジェクトOBの長さや大きさを変更してもよい。この場合、例えば配達対象物Pの重量が重い場合は、オブジェクトOBの大きさが大きく投影されてよい。
このように、投影制御部66が、投影部PJに、オブジェクトOBを変化させて配達対象物Pに投影することによって、作業者にとって、より分かりやすい情報を投影することができる。
また、投影制御部66は、投影部PJに、色または輝度が異なる部分を含む画像を投影させてもよい。ここで「色」とは、例えば、投影部PJが画像を投影したときに、人の視覚において認識または識別されるものである。例えば、投影制御部66は、投影部PJが画像を投影する対象とする配達対象物Pの外観の色、画像が投影される空間の状態を加味して、人が視認した場合に認識する色が意図した色となるように、投影部PJの投影する色を制御する。
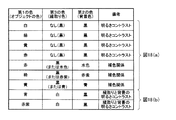
投影制御部66は、投影部PJに、第1の色でオブジェクトOBを投影させ、オブジェクトOBとは異なる領域であるオブジェクトOBの背景を第2の色で投影させてもよい。図18は、第1の色でオブジェクトOBが投影され、オブジェクトOBの背景Bが第2の色で投影された配達対象物Pの一例を示す図である。図18(a)に示すように、投影制御部66は、第1の色と第2の色との輝度差(コントラスト)が所定の輝度差以上となるように、オブジェクトOBを配達対象物Pに対応付けて投影させる。所定の輝度差は、例えば、人が視覚においてオブジェクトOBを認識または識別することができる程度に設定される。より具体的には、所定の輝度差以上とは、例えば輝度比が0.1以上、より好ましくは0.25以上であることを意味する。輝度比Cは、例えば背景Bの輝度L1から視認対象(オブジェクトOB)の輝度L2を減算した結果の絶対値を、背景Bの輝度L1で除算することで算出される(C=|L1−L2|/L1)。
また、所定の輝度差は、視認対象の色と背景の色との組み合わせにより、変更されてもよい。色の組み合わせにより、人の視覚による背景に対する視認対象の識別のしやすさは異なるためである。例えばある環境において、背景を白、視認対象を黄色とした場合、白の輝度L1は「255」、黄色の輝度L2は「227」となり、輝度比Cは、約0.11となる。また、背景を黄色、視認対象を水色(シアン、青緑)とした場合、L1は「227」、L2は「179」となり、輝度比Cは0.21となる。また、背景を水色(シアン、青緑)、視認対象を緑色とした場合、L1は「179」、L2は「150」となり、輝度比Cは0.16となる。上述した例を適用したとき、色が異なるため、わずかな時間(例えば1秒程度)で、人は視認対象を識別することができる。このように、所定の輝度差は、人の識別程度と色の組み合わせに基づいて設定されてもよい。
また、所定の輝度差は、画像を投影する対象物の色に応じて変更されてもよい。例えば対象物が明るい色(例えば白い箱)である場合に、背景の色を輝度が小さい色(例えば黒)に設定した場合であっても、白の輝度L1が大きいため、輝度比Cが相対的に小さくなる場合がある。このような場合であっても、人が背景と視認対象とを識別することができる程度の小さい値に、所定の輝度差は設定されてもよい。
また、投影制御部66は、第1の色と第2の色とを補色関係(complementary color)として、投影部PJに、オブジェクトOBを配達対象物Pに対応付けて投影させてもよい。
また、図18(b)に示すように、投影制御部66は、投影部PJに、第3の色でオブジェクトOBを縁取り(図中、領域E)させてもよい。投影制御部66は、第3の色と第2の色との輝度差が所定の輝度差以上となるように、オブジェクトOBを配達対象物Pに対応付けて投影させる。この輝度差は、前述した輝度差と異なる輝度差であってもよい。
図19は、投影制御部66が、投影部PJに投影させる色の一例を示す図である。投影部PJに投影させる色は、例えば日本工業規格のJIS9101、9103(以下、JIS規格という。)の安全色、またはマンセル表色系における安全色に対応するマンセル値を含む色である。
安全色とは、赤(7.5R)、黄赤(2.5YR)、黄(2.5Y)、緑(10G)、青(2.5PB)、赤紫(2.5RP)、白(N9.5)、黒(N1)のうち、いずれかの色を含む色である(カッコ内はマンセル表色系におけるマンセル値の色相)。なお、図19に示す色は、マンセル値におけるアルファベットの一部が重複する色に置き換えてもよい。例えば、黄(Y)に代えて黄赤(YR)、赤(R)に代えて黄赤(YR)、青(PB)に代えて赤紫(RP)を用いてもよい。
また、投影部PJに投影させる色は、安全色に類似する色であってもよい。安全色に類似する色とは、マンセル表色系の10色(赤R、黄Y、緑G、青B、紫P、黄赤YR、黄緑GY、青緑BG,青紫PB,赤紫RP)の各色を4分割にした40分割領域で形成された色循環において、対象とする色が含まれる分割領域に隣接する領域、或いはさらにその領域に隣接する領域に示される色までをいう。
第1の色と第2の色との輝度差が所定の輝度差以上となるように、オブジェクトOBを配達対象物Pに対応付けて投影させる場合(明るさコントラスト)、第1の色は、白、緑、黄、または赤である。第2の色は、黒である。また、第1の色と、第2の色とは入れ替えられてよい。この場合、第1の色は黒であり、第2の色は、白、緑、黄、または赤である。
第1の色と第2の色とを補色関係として、オブジェクトOBを配達対象物Pに対応付けて投影させる場合、第1の色と、第2の色との関係は、この順に、赤と水色(青緑)、緑と赤紫、または黄と青の組み合わせである。また、上述したように第1の色と、第2の色とは入れ替えられてよい。
また、第3の色でオブジェクトOBを縁取りさせてもよい。縁取りされる色は、例えば黒である。補色関係とは、例えばマンセル表色系の色循環において、正対する方向に存在する色である。正対する方向とは、例えば上記色循環において、正対する方向を中心として、90度(=中心から円周方向に45度)の範囲に含まれる色と定義される。
また、第2の色と第3の色との輝度差が所定の輝度差以上となるように、オブジェクトOBを配達対象物Pに対応付けて投影させる場合(縁取りと背景の明るさコントラスト)、第1の色、第2の色、および第3の色の組み合わせは、この順に、青と白と黒との組み合わせ、または赤紫と白と黒との組み合わせである。
また、投影制御部66は、処理前配達対象物データ72を参照し、配達対象物Pの重量、特性(割れ物、天地無用等)によって、オブジェクトOBの色を選択してもよい。この場合、投影制御部66は、配達対象物Pの重量が重い場合や配達対象物Pの特性が割れ物等の場合は、オブジェクトOBの色を特定の色に設定し、投影部PJに投影させてもよい。
このように、オブジェクトOBを投影する色と、オブジェクトOBとは異なる領域(縁取りも含む。)を投影する色とを、所定の色の組み合わせにすることにより、利用者にとってオブジェクトOBを認識させやすくすることができる。
上述した例では、「区分先に対応する搬送先を示す情報であるオブジェクトを、配達対象物Pに対応付けて投影部PJに投影させる」処理の一例として、配達対象物Pにオブジェクトを投影する例について説明したが、「配達対象物Pに対応付けて投影部PJに投影させる」処理の他の例として、投影制御部66は、投影部PJに、オブジェクトOBが配達対象物Pから延出するようにオブジェクトOBを投影させてもよい。
図20は、オブジェクトOBが配達対象物Pから延出するようにオブジェクトOBが投影された様子の一例を示す図である。例えば、投影制御部66は、投影部PJに、オブジェクトOBの指し示す矢印方向を、搬送先のカゴ車80(図中、識別情報10)に向け、配達対象物P内を始点SとしてオブジェクトOBを、配達対象物Pと区分台30とに投影させる。なお、始点Sに代えて、始点S#とされてもよい。始点S#は、配達対象物Pの外側であって、配達対象物Pが搬送されてくる(シュータ28)側に設定される。
また、「配達対象物Pに対応付けて投影部PJに投影させる」処理の他の例として、投影制御部66は、投影部PJに、オブジェクトOBと配達対象物Pとを重ねることなく、配達対象物Pの近くからオブジェクトOBを投影させてもよい。図21は、配達対象物Pの近くからオブジェクトOBが投影された様子の一例を示す図である。例えば、投影制御部66は、投影部PJに、オブジェクトOBの指し示す矢印方向を、搬送先のカゴ車80(図中、識別情報10)に向け、配達対象物Pの外側を始点S#1としてオブジェクトOBを区分台30に投影させる。始点S#1は、例えば、作業者がオブジェクトOBを視認した場合に、搬送対象の配達対象物Pに対応して投影されていることが認識できる位置に設定される。この始点S#1の位置は、搬送対象の配達対象物Pの周辺に存在する配達対象物Pの位置や数によって変更されてもよい。
なお、オブジェクトOBの長さは、任意に変更されてもよい。また、オブジェクトOBは、区分台30に加え、区分台30が置かれた床面および/またはカゴ車80と重なるように投影されてもよい。
以上説明した第1の実施形態の変形例の配達支援システムによれば、投影制御部66が、投影部PJに、区分先に対応する搬送先を示すオブジェクトOBを配達対象物Pに対応付けて投影させることにより、より利便性を向上させることができる。
(第2の実施形態)
以下、第2の実施形態について説明する。第2の実施形態は、カゴ車80内における配達対象物Pを載せる位置を教示する点で第1の実施形態とは異なる。以下、この相違点を中心に説明する。
図22は、第2の実施形態の配達支援システム1Aの構成を示す図である。第2の実施形態の配達支援システム1Aは、第1の実施形態の配達支援システム1の構成に加え、更にカメラCM1、および積載位置特定部63を備える。
カメラCM1は、カゴ車80およびカゴ車80に表示された識別情報を撮像した画像を、撮像した時刻と共に、ネットワークNWを介して支援装置50に送信する。
画像認識部58は、カゴ車80内に積載される複数の配達対象物Pによって形成される荷姿の情報をカメラCM1から取得する。画像認識部58は、例えば、カメラCM1から取得される荷姿の3次元形状の画像データに所定の画像処理を行うことによって、荷姿の3次元形状を認識する。
積載位置特定部63は、画像認識部58により認識された荷姿と積載対象の配達対象物Pとに基づき、配達対象物Pが積載されるカゴ車80内の位置を導出する。積載位置特定部63は、予め設定されたアルゴリズムに基づいて、搬送されてくる配達対象物Pを効率的にカゴ車80に積載するための積載パターンを導出する。積載位置特定部63は、導出された積載パターンに基づいて、積載対象の配達対象物Pが積載される位置を特定する。また、積載位置特定部63は、画像認識部58の認識結果に基づいて、積載対象の配達対象物Pが積載された位置を特定する。積載位置特定部63は、積載対象の配達対象物Pが、積載パターンに対応する位置に積載されたか否かを判定する。
投影制御部66は、積載位置特定部63により特定されたカゴ車80内の配達対象物Pが積載される位置を示す情報を投影部PJに投影させる。図23は、投影部PJにより、カゴ車80内に配達対象物Pが積載される位置を示す情報を含む画像が投影される様子を示す図である。作業者は投影部PJに投影された画像の情報に従って、配達対象物Pをカゴ車80に載せることで、効率的にカゴ車80に配達対象物Pを積載することができる。
また、投影制御部66は、積載位置特定部63により特定されたカゴ車80内に積載された配達対象物Pが、積載パターンに対応する位置に積載されていない場合、作業者に注意を促す情報や、修正を指示する情報を投影部PJに投影させる。
支援装置50のデータ管理部54は、画像認識部58により認識されたカゴ車80の識別情報を、カゴ車80に載せられた配達対象物Pに対応する処理後配達対象物データ74に記憶させる。また、データ管理部54は、画像認識部58により認識されたカゴ車80内における配達対象物Pの位置を、配達対象物Pの識別情報に対応付けて処理後配達対象物データ74に記憶させる。これにより、支援装置50は、配達対象物Pが載せられたカゴ車80およびカゴ車80内の配達対象物Pの位置を特定することができる。
なお、図示するように配達対象物Pには、予めRFID(Radio Frequency IDentifier)タグTG1が取り付けられている状態で区分台30に搬送されてもよいし、作業者aによってRFIDタグTG1が取り付けられてもよい。RFIDタグTG1は、通信によって自身の識別情報であるタグIDを送信する。
また、カゴ車80には、通信機TMが取り付けられていてもよい。通信機TMは、カゴ車80に載せられるときに配達対象物PのRFIDタグTG1を検知する。通信機TMは、RFIDタグTG1のタグIDを、例えば通信時刻と共に支援装置50に送信する。
支援装置50のデータ管理部54は、通信機TMから送信された情報を処理後配達対象物データ74に記憶させる。これにより、支援装置50は、より精度よく配達対象物Pが載せられたカゴ車80を特定することができる。
なお、支援装置50は、ネットワークNWを介して取得した処理後配達対象物データ74の情報を、上位装置100に送信してもよい。これにより、上位装置100側においても、配達対象物Pが積載されたカゴ車80を特定することができる。
以上説明した第2の実施形態によれば、支援装置50が、作業者は投影部PJに投影された画像の情報に従って、配達対象物Pをカゴ車80に載せることで、効率的にカゴ車80に配達対象物Pを積載することができる。また、支援装置50は、配達対象物Pが載せられたカゴ車80を特定することができる。この結果、配達支援システム1は、利便性を向上させることができる。
(第3の実施形態)
以下、第3の実施形態について説明する。第3の実施形態は、ハンディターミナル120から送信された情報に基づいて、投影制御部66が投影部PJを制御する点で第1の実施形態とは異なる。以下、この相違点を中心に説明する。
図24は、第3の実施形態の配達支援システム1Bの構成を示す図である。第3の実施形態の配達支援システム1Bは、第1の実施形態の配達支援システム1の構成に加え、更に、ハンディターミナル120を備える。
ハンディターミナル120は、バーコードやQRコード(登録商標)を読み取るコード読み取り部、文字を読み取る文字読み取り部(OCR(Optical Character Recognition)部)、あるいはOCR依頼を外部装置(例えば支援装置50)に送信する依頼部、RFIDタグTG1と通信するタグ通信部、ユーザの入力操作を受け付ける入力部、情報を表示する表示部、セルラー網またはWi−Fi網を介してネットワークNWに接続するためのネットワーク通信部等を備える。ハンディターミナル120から、これらの機能構成のうち一部が省略されてもよい。
ハンディターミナル120は、作業者によって保持され、区分先が不明であることを示す画像が投影された配達対象物Pに翳されることで、区分先などの情報を配達対象物Pから読み取る。
ハンディターミナル120は、作業者の操作に応じて、配達対象物Pに表示されたバーコードやQRコードにエンコードされた識別情報を、ネットワークNWを介して支援装置50に送信する。なお、ハンディターミナル120により取得された情報の送信は、支援装置50と直接的に行われてもよいし、上位装置100にデータが取得されてから、ネットワークNWを介して支援装置50に送信されてもよい。
支援装置50のデータ管理部54は、ハンディターミナルにより取得された配達対象物Pの情報に基づいて、配達対象物Pの識別情報を特定する。投影制御部66は、データ管理部54により特定された識別情報に基づいて、配達対象物Pの区分先を示す情報を投影部PJに投影させる。
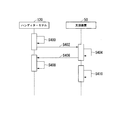
図25は、支援装置50が配達対象物Pに向けて区分先を示す情報を投影する過程を示すシーケンス図である。まず、ハンディターミナル120により配達対象物Pの識別情報IDが取得される(ステップS400)。次に、ハンディターミナル120が、取得した配達対象物Pの識別情報IDを支援装置50に送信する(ステップS402)。次に、支援装置50のデータ管理部54が、ハンディターミナル120から送信された配達対象物Pの識別情報IDに対応する配達対象物Pの区分先を特定する(ステップS404)。次に、支援装置50が、特定した区分先をハンディターミナル120に送信する(ステップS406)。次に、ハンディターミナル120は、自装置の表示部に支援装置50から送信された区分先を表示させる(ステップS408)。次に、支援装置50の投影制御部66が、ステップS404で特定した区分先に対応する情報を投影部PJに投影させる(ステップS410)。
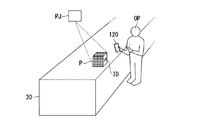
図26は、作業者がハンディターミナル120を用いて配達対象物Pの識別情報を取得する様子を示す図である。例えば、支援装置50の位置特定部60が、副搬送路20により搬送されていた配達対象物Pと、カメラCMにより撮像された配達対象物Pとの確からしさが低いと判定した場合、投影部PJは、確からしさが低いことを示す情報を含む画像を、その配達対象物Pに向けて投影する。このとき作業者は、ハンディターミナル120を用いて配達対象物Pに表示されたバーコード等(ID)を読み取る。読み取られた情報は、支援装置50に送信される。支援装置50のデータ管理部54は、ハンディターミナル120から送信された情報に基づいて、配達対象物Pの区分先を特定する。投影制御部66は、特定した区分先に対応する情報を投影部PJに投影させる。図27は、投影部PJにより区分先に対応する情報を含む画像が投影される様子を示す図である。これにより、作業者OPは、配達対象物Pの区分先を容易に認識することができる。
以上説明した第3の実施形態によれば、支援装置50は、ハンディターミナル120により取得された識別情報に基づいて、配達対象物Pの識別情報に対応する区分先を特定し、特定した区分先に対応する情報を投影部PJに投影させる。この結果、支援装置50は、確からしさが低いと判定された配達対象物Pに対しても、ハンディターミナル120から送信された情報に基づいて区分先に対応する情報を配達対象物Pに投影させることができる。この結果、配達支援システム1Bは、利便性を向上させることができる。
なお、上述した第1の実施形態から第3の実施形態では、配達対象物Pの区分先に応じて色彩を切り替えるものとしたが、配達支援システム1から1Bは、負荷推定部64により推定された負荷に応じて、一時的に、例えば負荷の低い作業者aに領域Bに対応する区分先の配達対象物Pを担当させるようにしてもよい。この場合、投影制御部66は、領域Bに対応する区分先である配達対象物Pの一部について、領域Aの区分先と同じ色彩を投影する。そうすると、作業者aは領域Aに対応する区分先と同じ色彩が投影された配達対象物Pを、領域Bに対応する区分先に対応するカゴ車80に運搬することになる。
(第4の実施形態)
以下、第4の実施形態について説明する。第1の実施形態では、区分先を示す情報を投影部PJに投影させるものとしたが、第4の実施形態の配達支援システム1は、配達対象物Pを運搬すべき作業者に関する情報を投影部PJに投影させる点で、第1の実施形態とは異なる。以下、この相違点を中心に説明する。
図28は、第4の実施形態の対応情報76Aの一例を示す図である。対応情報76Aは、作業者の識別情報に対して、作業者が担当する作業領域の範囲を示す情報、作業範囲に対応するカゴ車80の識別情報、およびカゴ車80の位置を示す情報が対応付けられている。
データ管理部54は、負荷推定部64の負荷の推定結果に基づいて、対応情報76Aを変更する。データ管理部54は、作業者が担当する作業領域の範囲を変更する。また、データ管理部54は、対応情報76Aの作業者に対応付けられたカゴ車80に関する情報を変更する。データ管理部54は、カゴ車80の情報を変更した作業者の作業範囲内に配置されているカゴ車80に関する情報に変更する。また、対応情報76Aには、配達対象物Pの識別情報と、作業者の識別情報とが互いに対応付けられていてもよい。
図29は、各領域の負荷が高くない状態における作業者が担当する作業領域の状態を示す図である。図示する例では、作業者aは識別情報1から5に対応するカゴ台車を含む領域a#、作業者bは識別情報6から8に対応するカゴ台車を含む領域b#、作業者cは識別情報9から13に対応するカゴ台車を含む領域c#、作業者dは識別情報14から16に対応するカゴ台車を含む領域d#が、担当する作業領域として設定されているものとする。例えば、設定されている作業領域の範囲は、作業者の処理能力等により設定される。
図30は、各領域の負荷が高い状態における作業者が担当する作業領域の状態を示す図である。図示する例では、作業者cの作業領域c#に配達対象物Pが他の領域よりも多く置かれている。負荷推定部64は、作業者cの負荷が高いと推定する。この場合、データ管理部54は、負荷推定部64の負荷の推定結果に基づいて、対応情報76Aを変更する。データ管理部54は、例えば負荷の高い作業者cの作業領域c#の範囲を縮小し、負荷の高くない作業領域d#の範囲を拡張するように対応情報76Aを変更する。データ管理部54は、例えば識別情報9から12に対応するカゴ車80を含むように作業領域c#の範囲を変更し、識別情報13から16に対応するカゴ車80を含むように作業領域d#の範囲を変更する。これにより、例えば作業者に対する負荷を均一化することができる。
以上説明した第4の実施形態によれば、データ管理部54は、対応情報76Aに記憶された作業者が担当する作業領域の範囲を変更することで、作業者に対する負荷を均一化することができる。この結果、配達支援システム1は、利用者の利便性を向上させることができる。
なお、第1の実施形態において、第4の実施形態の配達対象物Pを運搬すべき作業者に関する情報を投影部PJに投影させる処理を適用してもよい。この場合、例えば、バッファ部26AからDは、作業者に対応付けて設定される。負荷推定部64は、区分台30に置かれた配達対象物Pの数量が多い作業者を負荷が高いと判定する。負荷の高い作業者が存在する場合、バッファ制御部68は、負荷が高い作業者が運搬すべき配達対象物Pをバッファ部26に退避させる。
また、第2の実施形態において、第4の実施形態を適用してもよい。また、第3の実施形態において、第4の実施形態の配達対象物Pを運搬すべき作業者に関する情報を投影部PJに投影させる処理を適用してもよい。例えば、支援装置50のデータ管理部54は、ハンディターミナル120により取得された配達対象物Pの情報に基づいて、配達対象物Pの識別情報を特定する。投影制御部66は、データ管理部54により特定された識別情報に基づいて、配達対象物Pを運搬すべき作業者に関する情報を投影部PJに投影させる。
(第5の実施形態)
以下、第5の実施形態について説明する。第5の実施形態は、支援装置50により処理された配達対象物Pの数量等を統計処理する統計部69および表示部78を備える点で第1の実施形態から第4の実施形態とは異なる。以下、この相違点を中心に説明する。
図31は、第5の実施形態の配達支援システム1Cの構成を示す図である。配達支援システム1Cは、第1の実施形態の配達支援システム1の構成に加え、更に統計部69を備える。統計部69は、画像認識部58、位置特定部60、負荷推定部64、および投影制御部66、またはバッファ制御部68の処理結果に基づいて、統計処理を実行する。統計部69は、例えば統計処理の結果を、支援装置50の表示部78に表示させる。表示部78は、統計部69の統計結果を示す画像を表示する。
図32は、統計部69の統計結果の一例を示す図である。統計部69は、例えば作業者ごとの配達対象物Pの合計処理数、単位時間当たりの処理数、区分先とは異なる誤ったカゴ車80に配達対象物Pを載せた数、誤ったカゴ車80に配達対象物Pを載せた割合、処理した配達対象物Pの総重量、処理した配達対象物Pが割れ物等である数である。このように、統計部69が、各部の処理結果に基づいて、統計処理を実行することにより、作業者の作業効率や、作業の精度を導出することができる。この結果、利用者の利便性を向上させることができる。
なお、本実施形態では、支援装置50が統計部69を含むものとして説明したが、上位装置100が統計部69を含んでもよい。この場合、支援装置50は、自装置の処理結果を上位装置100に送信する。
以上説明した第5の実施形態によれば、統計部69が、統計処理を実行することにより作業者の作業効率や、作業の精度を導出することができ、利用者の利便性を向上させることができる。この結果、配達支援システム1は、利便性を向上させることができる。
なお、配達支援システム1は、副搬送路20、シュータ28、または区分台30で配達対象物Pの識別情報を取得してもよい。例えば、配達支援システム1は、カメラCMに加え、更に副搬送路20、シュータ28、または区分台30の配達対象物Pの識別情報を撮像するカメラ(ラインセンサ)を備える。画像認識部58は、カメラによって撮像された画像の画像データに対して認識処理を行う。位置特定部60は、画像認識部58の認識結果に基づいて、配達対象物Pの識別情報を取得する。投影制御部66が、位置特定部60により特定された配達対象物Pの識別情報に対応する区分先に基づいて、画像を投影部PJに投影させてもよい。この結果、より精度よく配達対象物Pの識別情報を取得することができる。
なお、区分台30は、自動搬送機構を備えてもよい。自動搬送機構は、搬送ベルト、および搬送ベルトを駆動させる駆動モータを含む。搬送ベルトは、駆動モータの制御に基づいて配達対象物Pを搬送する。駆動モータは、例えば搬送制御部56の制御に基づいて駆動する。搬送制御部56は、例えば配達対象物Pの区分先に基づいて、シュータ28から滑り落ちてくる配達対象物Pを、区分先に対応する領域、または配達対象物Pを区分する作業者の存在する位置付近に移動させる。
また、上述した第1の実施形態から第5の実施形態の投影部PJに代えて、ウェアラブルグラスや、スピーカを備えてもよい。この場合、支援装置50は、投影制御部66に代えて、ウェアラブルグラスや、スピーカを制御する情報制御部を備える。ウェアラブルグラスや、スピーカは、情報制御部の制御に基づいて、配達対象物Pの区分先を示す情報や、配達対象物Pを運搬すべき作業者に関する情報を出力する。
ウェアラブルグラスは、作業者に装着される。ウェアラブルグラスの表示部には、作業者が見ている位置特定部60により特定された配達対象物Pの位置に重畳されて、配達対象物Pの区分先に対応する情報が表示される。また、ウェアラブルグラスの表示部には、作業者が見ている位置特定部60により特定された配達対象物Pの位置に重畳されて、配達対象物Pを運搬すべき作業者に関する情報が表示される。スピーカは、情報制御部の制御に基づいて、位置特定部60により特定された配達対象物Pの位置が所定の位置の到達したときに、配達対象物Pの区分先を示す情報、または配達対象物Pを運搬すべき作業者に関する情報を出力する。
また、作業者に代えて、作業用ロボットを適用してもよい。この場合、配達支援システム1は、配達対象物Pの位置を示す信号と、区分先を示す信号とを無線または有線で作業用ロボットに送信する通信装置(提示部の一例)を備える。
以上説明した少なくともひとつの実施形態によれば、主搬送経路から搬出され、集積箇所に集積される配達対象物を撮像する撮像部と、前記配達対象物の識別情報および区分先に関する情報を取得する取得部と、前記撮像部により撮像された画像に基づいて、前記取得部により取得された識別情報に対応する前記配達対象物の位置を特定する位置特定部と、画像を投影する投影部と、前記位置特定部により特定された位置および前記取得部により取得された区分先に関する情報に基づいて、前記投影部に、前記区分先に対応する搬送先を示すオブジェクトを前記配達対象物に対応付けて投影させる制御部とを持つことにより、利便性を向上させることができる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。