JP6336992B2 - モバイルデバイスのマップ支援センサーベース測位 - Google Patents
モバイルデバイスのマップ支援センサーベース測位 Download PDFInfo
- Publication number
- JP6336992B2 JP6336992B2 JP2015537723A JP2015537723A JP6336992B2 JP 6336992 B2 JP6336992 B2 JP 6336992B2 JP 2015537723 A JP2015537723 A JP 2015537723A JP 2015537723 A JP2015537723 A JP 2015537723A JP 6336992 B2 JP6336992 B2 JP 6336992B2
- Authority
- JP
- Japan
- Prior art keywords
- mobile device
- estimated
- trajectory
- estimating
- indoor environment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C22/00—Measuring distance traversed on the ground by vehicles, persons, animals or other moving solid bodies, e.g. using odometers, using pedometers
- G01C22/006—Pedometers
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
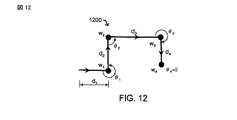
2.慣性オドメトリ:ステップのシーケンス(s1,s2,...sn)、ただし、各sj=<φj,lj>は角度と距離とに関連付けられ得る。

以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。
[C1]少なくとも1つのコンピューティングプラットフォームを用いて、
屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定することと、
前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて前記推定された軌道に作用することと
を備える方法。
[C2]前記軌道を前記推定することは、
前記モバイルデバイスにおける少なくとも1つの加速度計から取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、動きモードに関連する少なくとも1つのアクションの発生を検出することと、
前記少なくとも1つのアクションの前記発生に少なくとも部分的に基づいて、ある時間期間中に前記モバイルデバイスが移動した距離、または前記時間期間中の前記モバイルデバイスの速度のうちの少なくとも1つを推定することと
をさらに備える、[C1]に記載の方法。
[C3]前記動きモードが二足歩行移動モードを備え、前記少なくとも1つのアクションが少なくとも1つのステッピングアクションを備え、
前記少なくとも1つのステッピングアクションの、推定ストライド長、または推定ストライド頻度のうちの少なくとも1つに少なくとも部分的に基づいて、移動した前記距離、または前記速度のうちの少なくとも1つを推定すること
をさらに備える、[C2]に記載の方法。
[C4]移動した前記距離、または前記速度のうちの少なくとも1つを推定することが、
ステップカウントを積算すること
をさらに備える、[C3]に記載の方法。
[C5]前記軌道を前記推定することは、
前記モバイルデバイスにおけるジャイロスコープ、または前記モバイルデバイスにおける磁力計のうちの少なくとも1つから取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、前記モバイルデバイスの配向の変化が発生したのか発生しなかったのかを判断することと、
前記配向の前記変化が発生したのか発生しなかったのかの前記判断に少なくとも部分的に基づいて前記モバイルデバイスの現在のヘッディングを推定することと
をさらに備える、[C1]に記載の方法。
[C6]前記モバイルデバイスの前記現在のヘッディングを前記推定することが、
少なくとも1つの前に推定されたヘッディングに少なくとも部分的に基づいて前記モバイルデバイスの前記現在のヘッディングを推定すること
をさらに備える、[C5]に記載の方法。
[C7]前記推定された軌道に前記作用することが、
前記電子マップにおいて識別された前記1つまたは複数の物体のうちの少なくとも1つに少なくとも部分的に基づいて定義された1つまたは複数の中間地点の1つまたは複数のロケーションを使用すること
をさらに備える、[C1]に記載の方法。
[C8]前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記モバイルデバイスのユーザインターフェースから受信された少なくとも1つの入力に少なくとも部分的に基づいて前記1つまたは複数の中間地点の前記1つまたは複数のロケーションのうちの少なくとも1つを取得すること
をさらに備える、[C7]に記載の方法。
[C9]前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記電子マップに少なくとも部分的に基づいて前記1つまたは複数の中間地点の前記1つまたは複数のロケーションのうちの少なくとも1つを判断すること
をさらに備える、[C7]に記載の方法。
[C10]前記推定された軌道に前記作用することが、
少なくとも部分的に、粒子フィルタを使用して、前記推定された軌道のドリフトを補正すること
をさらに備える、[C1]に記載の方法。
[C11]前記粒子フィルタは、前記電子マップ上の前記モバイルデバイスの推定位置、前記モバイルデバイスの推定ヘッディング、ある時間期間中に前記モバイルデバイスが移動した推定距離、または前記時間期間中の前記モバイルデバイスの推定速度のうちの少なくとも1つに少なくとも部分的に基づいて、粒子状態を維持する、[C10]に記載の方法。
[C12]前記推定ヘッディングが、推定回転特性に少なくとも部分的に基づくヘッディングエラーに関連付けられる、[C11]に記載の方法。
[C13]前記粒子フィルタが、前記推定された軌道からしきい値測定値超だけそれる伝搬粒子を除去することに少なくとも部分的に基づいて粒子状態を維持する、[C10]に記載の方法。
[C14]前記粒子フィルタが、前記モバイルデバイスにおいて取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて粒子を伝搬する、[C10]に記載の方法。
[C15]前記推定された軌道に前記作用することが、
少なくとも部分的に、コスト関数に少なくとも部分的に基づく個別回転割当てを使用して、前記推定された軌道のドリフトを補正すること
をさらに備える、[C1]に記載の方法。
[C16]前記コスト関数は、ある時間期間中の前記推定された軌道と比較される前記モバイルデバイスの配向の差に対応するコスト、または前記時間期間中に前記モバイルデバイスが移動した推定された距離に対する前記推定された軌道上の連続する中間地点間の距離に対応するコストのうちの少なくとも1つを考慮に入れる、[C15]に記載の方法。
[C17]前記コスト関数が、マッチングコストを最小限に抑えるための動的関数を使用して計算される、[C15]に記載の方法。
[C18]前記少なくとも1つのコンピューティングプラットフォームが前記モバイルデバイス中に設けられる、[C1]に記載の方法。
[C19]前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記推定された軌道と前記電子マップとに少なくとも部分的に基づいて前記モバイルデバイスのロケーションを推定すること
をさらに備える、[C18]に記載の方法。
[C20]前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記モバイルデバイスの少なくとも1つのユーザ出力デバイスを介して前記モバイルデバイスの前記推定されたロケーションの提示を開始すること
をさらに備える、[C19]に記載の方法。
[C21]前記推定することが、前記屋内環境の前記電子マップに少なくとも部分的に基づいて、前記屋内環境における複数の潜在的な軌道から前記軌道を推定することを備える、[C1]に記載の方法。
[C22]前記推定することが、信号ベース測位情報を使用せずに前記モバイルデバイスの前記軌道を推定することを備える、[C1]に記載の方法。
[C23]屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定するための手段と、
前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて前記推定された軌道に作用するための手段と
を備える装置。
[C24]メモリと、
屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定することと、
前記メモリを介してアクセス可能な前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて前記推定された軌道に作用することと
を行うための1つまたは複数の処理ユニットと
を備えるコンピューティングプラットフォーム。
[C25]前記1つまたは複数の処理ユニットは、
前記モバイルデバイスにおける少なくとも1つの加速度計から取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、動きモードに関連する少なくとも1つのアクションの発生を検出することと、
前記少なくとも1つのアクションの前記発生に少なくとも部分的に基づいて、ある時間期間中に前記モバイルデバイスが移動した距離、または前記時間期間中の前記モバイルデバイスの速度のうちの少なくとも1つを推定することと
をさらに行うためのものである、[C24]に記載のコンピューティングプラットフォーム。
[C26]前記動きモードが二足歩行移動モードを備え、前記少なくとも1つのアクションが少なくとも1つのステッピングアクションを備え、前記1つまたは複数の処理ユニットが、
前記少なくとも1つのステッピングアクションの、推定ストライド長、または推定ストライド頻度のうちの少なくとも1つに少なくとも部分的に基づいて、移動した前記距離、または前記速度のうちの少なくとも1つを推定すること
をさらに行うためのものである、[C25]に記載のコンピューティングプラットフォーム。
[C27]前記1つまたは複数の処理ユニットが、
さらにステップカウントを積算すること
によって、移動した前記距離、または前記速度のうちの少なくとも1つを推定することをさらに行うためのものである、[C26]に記載のコンピューティングプラットフォーム。
[C28]前記1つまたは複数の処理ユニットは、
前記モバイルデバイスにおけるジャイロスコープ、または前記モバイルデバイスにおける磁力計のうちの少なくとも1つから取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、前記モバイルデバイスの配向の変化が発生したのか発生しなかったのかを判断することと、
前記配向の前記変化が発生したのか発生しなかったのかの前記判断に少なくとも部分的に基づいて前記モバイルデバイスの現在のヘッディングを推定することと
をさらに行うためのものである、[C24]に記載のコンピューティングプラットフォーム。
[C29]前記1つまたは複数の処理ユニットが、
少なくとも1つの前に推定されたヘッディングに少なくとも部分的に基づいて前記モバイルデバイスの前記現在のヘッディングを推定すること
をさらに行うためのものである、[C28]に記載のコンピューティングプラットフォーム。
[C30]前記1つまたは複数の処理ユニットが、前記電子マップにおいて識別された前記1つまたは複数の物体のうちの少なくとも1つに少なくとも部分的に基づいて定義された1つまたは複数の中間地点の1つまたは複数のロケーションに少なくとも部分的に基づいて前記推定された軌道に作用することを行うためのものである、[C24]に記載のコンピューティングプラットフォーム。
[C31]前記1つまたは複数の処理ユニットが、
前記モバイルデバイスのユーザインターフェースから受信され、前記メモリを介してアクセス可能な少なくとも1つの入力に少なくとも部分的に基づいて前記1つまたは複数の中間地点の前記1つまたは複数のロケーションのうちの少なくとも1つを取得すること
をさらに行うためのものである、[C30]に記載のコンピューティングプラットフォーム。
[C32]前記1つまたは複数の処理ユニットが、
前記電子マップに少なくとも部分的に基づいて前記1つまたは複数の中間地点の前記1つまたは複数のロケーションのうちの少なくとも1つを判断すること
をさらに行うためのものである、[C30]に記載のコンピューティングプラットフォーム。
[C33]前記1つまたは複数の処理ユニットが、少なくとも部分的に、粒子フィルタを使用して、前記推定された軌道のドリフトを補正することによって少なくとも部分的に基づいて、前記推定された軌道に作用することをさらに行うためのものである、[C24]に記載のコンピューティングプラットフォーム。
[C34]前記粒子フィルタは、前記電子マップ上の前記モバイルデバイスの推定位置、前記モバイルデバイスの推定ヘッディング、ある時間期間中に前記モバイルデバイスが移動した推定距離、または前記時間期間中の前記モバイルデバイスの推定速度のうちの少なくとも1つに少なくとも部分的に基づいて、粒子状態を維持する、[C33]に記載のコンピューティングプラットフォーム。
[C35]前記推定ヘッディングが、推定回転特性に少なくとも部分的に基づくヘッディングエラーに関連付けられる、[C34]に記載のコンピューティングプラットフォーム。
[C36]前記粒子フィルタが、前記推定された軌道からしきい値測定値超だけそれる伝搬粒子を除去することに少なくとも部分的に基づいて粒子状態を維持する、[C33]に記載のコンピューティングプラットフォーム。
[C37]前記粒子フィルタが、前記モバイルデバイスにおいて取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて粒子を伝搬する、[C33]に記載のコンピューティングプラットフォーム。
[C38]前記1つまたは複数の処理ユニットが、少なくとも部分的に、コスト関数に少なくとも部分的に基づく個別回転割当てを使用して、前記推定された軌道のドリフトを補正することに少なくとも部分的によって、前記推定された軌道に作用することを行うためのものである、[C24]に記載のコンピューティングプラットフォーム。
[C39]前記コスト関数は、ある時間期間中の前記推定された軌道と比較される前記モバイルデバイスの配向の差に対応するコスト、または前記時間期間中に前記モバイルデバイスが移動した推定された距離に対する前記推定された軌道上の連続する中間地点間の距離に対応するコストのうちの少なくとも1つを考慮に入れる、[C38]に記載のコンピューティングプラットフォーム。
[C40]前記コスト関数が、マッチングコストを最小限に抑えるための動的関数を使用して計算される、[C38]に記載のコンピューティングプラットフォーム。
[C41]前記コンピューティングプラットフォームが前記モバイルデバイス中に設けられる、[C24]に記載のコンピューティングプラットフォーム。
[C42]前記1つまたは複数の処理ユニットが、
前記推定された軌道と前記電子マップとに少なくとも部分的に基づいて前記モバイルデバイスのロケーションを推定すること
をさらに行うためのものである、[C41]に記載のコンピューティングプラットフォーム。
[C43]前記モバイルデバイスが少なくとも1つのユーザ出力デバイスをさらに備え、前記1つまたは複数の処理ユニットが、前記少なくとも1つのユーザ出力デバイスを介して前記モバイルデバイスの前記推定されたロケーションの提示を開始することをさらに行うためのものである、[C42]に記載のコンピューティングプラットフォーム。
[C44]屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定することと、
前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて前記推定された軌道に作用することと
を行うようにコンピューティングプラットフォーム中の1つまたは複数の処理ユニットによって実行可能なコンピュータ実装可能命令を記憶した非一時的コンピュータ可読媒体。
Claims (15)
- 少なくとも1つのコンピューティングプラットフォームを用いて、
屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定することと、
前記モバイルデバイスのユーザインターフェースから受信された少なくとも1つの入力に少なくとも部分的に基づいて中間地点の1つまたは複数のロケーションのうちの少なくとも1つを取得することと、前記1つまたは複数の中間地点の前記ロケーションが、前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて定義され、前記1つまたは複数の中間地点はさらに、前記モバイルデバイスのユーザが従う予定ルートのルーティング方向に少なくとも部分的に基づいて判断され、前記中間地点は、前記屋内環境内の1つまたは複数の物体の配置に関して定義され、
前記推定された軌道のドリフトを補正するために、前記1つまたは複数の中間地点の前記1つまたは複数のロケーションに少なくとも部分的に基づいて前記推定された軌道に作用することと
を備え、
前記推定された軌道に前記作用することが、
少なくとも部分的に、コスト関数に少なくとも部分的に基づく個別回転割当てアルゴリズムを使用して、前記推定された軌道のドリフトを補正すること
をさらに備え、前記個別回転割当てアルゴリズムは、前記中間地点を、前記1つまたは複数のセンサー測定値から取得されたオドメトリ情報中の検出されたステッピングアクションに割り当てる、方法。 - 前記軌道を前記推定することは、
前記モバイルデバイスにおける少なくとも1つの加速度計から取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、動きモードに関連する少なくとも1つのアクションの発生を検出することと、
前記少なくとも1つのアクションの前記発生に少なくとも部分的に基づいて、ある時間期間中に前記モバイルデバイスが移動した距離、または前記時間期間中の前記モバイルデバイスの速度のうちの少なくとも1つを推定することと
をさらに備える、請求項1に記載の方法。 - 前記動きモードが二足歩行移動モードを備え、前記少なくとも1つのアクションが少なくとも1つのステッピングアクションを備え、
前記少なくとも1つのステッピングアクションの、推定ストライド長、または推定ストライド頻度のうちの少なくとも1つに少なくとも部分的に基づいて、移動した前記距離、または前記速度のうちの少なくとも1つを推定すること
をさらに備える、請求項2に記載の方法。 - 移動した前記距離、または前記速度のうちの少なくとも1つを推定することが、
ステップカウントを積算すること
をさらに備える、請求項3に記載の方法。 - 前記軌道を前記推定することは、
前記モバイルデバイスにおけるジャイロスコープ、または前記モバイルデバイスにおける磁力計のうちの少なくとも1つから取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて、前記モバイルデバイスの配向の変化が発生したのか発生しなかったのかを判断することと、
前記配向の前記変化が発生したのか発生しなかったのかの前記判断に少なくとも部分的に基づいて前記モバイルデバイスの現在のヘッディングを推定することと
をさらに備える、請求項1に記載の方法。 - 前記モバイルデバイスの前記現在のヘッディングを前記推定することが、
少なくとも1つの前に推定されたヘッディングに少なくとも部分的に基づいて前記モバイルデバイスの前記現在のヘッディングを推定すること
をさらに備える、請求項5に記載の方法。 - 前記推定された軌道に前記作用することが、
少なくとも部分的に、粒子フィルタを使用して、前記推定された軌道のドリフトを補正すること
をさらに備え、
前記粒子フィルタは、前記電子マップ上の前記モバイルデバイスの推定位置、前記モバイルデバイスの推定ヘッディング、ある時間期間中に前記モバイルデバイスが移動した推定距離、または前記時間期間中の前記モバイルデバイスの推定速度のうちの少なくとも1つに少なくとも部分的に基づいて、粒子状態を維持し、
前記推定ヘッディングは、回転量に比例するようにモデル化されたヘッディングエラーに関連付けられる、請求項1に記載の方法。 - 前記粒子フィルタが、前記推定された軌道からしきい値超だけそれる伝搬粒子を除去することに少なくとも部分的に基づいて粒子状態を維持する、および/または、
前記粒子フィルタが、前記モバイルデバイスにおいて取得された前記1つまたは複数のセンサー測定値のうちの少なくとも1つに少なくとも部分的に基づいて粒子を伝搬する、請求項7に記載の方法。 - 前記コスト関数は、ある時間期間中の前記推定された軌道と比較される前記モバイルデバイスの配向の差に対応するコスト、または前記時間期間中に前記モバイルデバイスが移動した推定された距離に対する前記推定された軌道上の連続する中間地点間の距離に対応するコストのうちの少なくとも1つを考慮に入れる、請求項1に記載の方法。
- 前記コスト関数が、マッチングコストを最小限に抑えるための動的関数を使用して計算される、請求項9に記載の方法。
- 前記少なくとも1つのコンピューティングプラットフォームが前記モバイルデバイス中に設けられ、
前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記推定された軌道と前記電子マップとに少なくとも部分的に基づいて前記モバイルデバイスのロケーションを推定すること
をさらに備え、
前記少なくとも1つのコンピューティングプラットフォームを用いて、
前記モバイルデバイスの少なくとも1つのユーザ出力デバイスを介して前記モバイルデバイスの前記推定されたロケーションの提示を開始すること
をさらに備える、請求項1に記載の方法。 - 前記推定することが、前記屋内環境の前記電子マップに少なくとも部分的に基づいて、前記屋内環境における複数の潜在的な軌道から前記軌道を推定することを備える、請求項1に記載の方法。
- 前記推定することが、信号ベース測位情報を使用せずに前記モバイルデバイスの前記軌道を推定することを備える、請求項1に記載の方法。
- 屋内環境内のモバイルデバイスにおいて取得された1つまたは複数のセンサー測定値に少なくとも部分的に基づいて前記モバイルデバイスの軌道を推定するための手段と、
前記モバイルデバイスのユーザインターフェースから受信された少なくとも1つの入力に少なくとも部分的に基づいて中間地点の1つまたは複数のロケーションのうちの少なくとも1つを取得するための手段と、前記1つまたは複数の中間地点の前記ロケーションが、前記屋内環境の電子マップにおいて識別された1つまたは複数の物体に少なくとも部分的に基づいて定義され、前記1つまたは複数の中間地点はさらに、前記モバイルデバイスのユーザが従う予定ルートのルーティング方向に少なくとも部分的に基づいて判断され、前記中間地点は、前記屋内環境内の1つまたは複数の物体の配置に関して定義され、
前記推定された軌道のドリフトを補正するために、前記1つまたは複数の中間地点の前記1つまたは複数のロケーションに少なくとも部分的に基づいて前記推定された軌道に作用するための手段と
を備え、
前記推定された軌道に作用するための前記手段が、
少なくとも部分的に、コスト関数に少なくとも部分的に基づく個別回転割当てアルゴリズムを使用して、前記推定された軌道のドリフトを補正するための手段
をさらに備え、前記個別回転割当てアルゴリズムは、前記中間地点を、前記1つまたは複数のセンサー測定値から取得されたオドメトリ情報中の検出されたステッピングアクションに割り当てる、装置。 - 請求項1乃至13のいずれかの方法ステップを実行するようにコンピューティングプラットフォーム中の1つまたは複数の処理ユニットによって実行可能なコンピュータ実装可能命令を記憶した非一時的コンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/657,428 | 2012-10-22 | ||
| US13/657,428 US9116000B2 (en) | 2012-10-22 | 2012-10-22 | Map-assisted sensor-based positioning of mobile devices |
| PCT/US2013/063756 WO2014066024A1 (en) | 2012-10-22 | 2013-10-08 | Map-assisted sensor-based positioning of mobile devices |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016502069A JP2016502069A (ja) | 2016-01-21 |
| JP2016502069A5 JP2016502069A5 (ja) | 2016-11-04 |
| JP6336992B2 true JP6336992B2 (ja) | 2018-06-06 |
Family
ID=49486668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015537723A Active JP6336992B2 (ja) | 2012-10-22 | 2013-10-08 | モバイルデバイスのマップ支援センサーベース測位 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9116000B2 (ja) |
| EP (1) | EP2909582B1 (ja) |
| JP (1) | JP6336992B2 (ja) |
| KR (1) | KR20150074124A (ja) |
| CN (1) | CN104736964B (ja) |
| WO (1) | WO2014066024A1 (ja) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8635023B2 (en) * | 2011-11-22 | 2014-01-21 | Google Inc. | Position indication controls for device locations |
| US20140129177A1 (en) * | 2012-11-07 | 2014-05-08 | Motorola Mobility Llc | Systems and Methods for Frequency-Based Stride Length Correction in a Pedometer Device |
| US9730029B2 (en) * | 2012-11-08 | 2017-08-08 | Duke University | Unsupervised indoor localization and heading directions estimation |
| TWI457539B (zh) * | 2012-12-19 | 2014-10-21 | Ind Tech Res Inst | 多姿態步距校正定位系統與方法 |
| US9292936B2 (en) * | 2013-01-09 | 2016-03-22 | Omiimii Ltd. | Method and apparatus for determining location |
| JP6062251B2 (ja) * | 2013-01-11 | 2017-01-18 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置、情報処理方法、携帯端末、およびサーバ |
| US10094905B2 (en) * | 2014-02-28 | 2018-10-09 | Qualcomm Incorporated | Opportunistic calibration of a barometer in a mobile device |
| US9510154B2 (en) | 2014-04-28 | 2016-11-29 | Samsung Electronics Co., Ltd | Location determination, mapping, and data management through crowdsourcing |
| US9528837B2 (en) * | 2014-06-04 | 2016-12-27 | Qualcomm Incorporated | Mobile device position uncertainty based on a measure of potential hindrance of an estimated trajectory |
| US9212924B1 (en) * | 2014-08-21 | 2015-12-15 | Microsoft Technology Licensing, Llc | Multimode transportation transitions |
| EP3191795A1 (en) * | 2014-09-08 | 2017-07-19 | InvenSense, Inc. | Method and apparatus for using map information aided enhanced portable navigation |
| JP6183716B2 (ja) * | 2014-09-19 | 2017-08-23 | カシオ計算機株式会社 | 運動支援装置及び運動支援方法、運動支援プログラム |
| US9891072B2 (en) * | 2014-12-08 | 2018-02-13 | Here Global B.V. | Method and apparatus for providing a map display based on velocity information |
| US10451708B2 (en) * | 2015-04-01 | 2019-10-22 | Tata Consultancy Services Limited | Backtracking indoor trajectories using mobile sensors |
| CA2926505A1 (en) * | 2015-05-04 | 2016-11-04 | Wal-Mart Stores, Inc. | System and method for mapping product locations |
| CN104931057B (zh) * | 2015-07-02 | 2018-07-27 | 深圳乐动机器人有限公司 | 一种机器人的任意位置定位方法、装置及系统 |
| CN105136143B (zh) * | 2015-07-29 | 2017-09-29 | 哈尔滨工业大学 | 基于imu数据的用户室内运动轨迹匹配方法 |
| FR3039737B1 (fr) | 2015-07-31 | 2017-09-01 | Intersec | Dispositif de determination de trajectoire |
| KR102398320B1 (ko) * | 2015-08-07 | 2022-05-16 | 삼성전자주식회사 | 경로 정보 제공 방법 및 그 방법을 처리하는 전자 장치 |
| CN105160659B (zh) * | 2015-08-14 | 2018-01-12 | 无锡物讯科技有限公司 | 二维平面拓扑区域中获取目标物补充位置轨迹的方法 |
| US9686767B2 (en) * | 2015-08-24 | 2017-06-20 | Qualcomm Incorporated | Device, method, and system for determining location |
| CN105115497B (zh) * | 2015-09-17 | 2018-07-24 | 南京大学 | 一种可靠的室内移动机器人精确导航定位系统及方法 |
| FR3042089B1 (fr) | 2015-10-02 | 2017-11-24 | Intersec | Dispositif de communication ameliore |
| US10185788B2 (en) * | 2015-10-13 | 2019-01-22 | Samsung Electronics Co., Ltd. | Rule based completion of maps with partial data |
| US10317243B2 (en) | 2015-10-15 | 2019-06-11 | Intertrust Technologies Corporation | Sensor information management systems and methods |
| US9888390B2 (en) | 2015-11-02 | 2018-02-06 | Wal-Mart Stores, Inc. | System and method for mapping wireless network coverage |
| CN105716608A (zh) * | 2015-11-23 | 2016-06-29 | 南京华苏科技股份有限公司 | 一种建筑物内活动轨迹的定位显示方法 |
| CN105547299A (zh) * | 2015-12-29 | 2016-05-04 | 哈尔滨工业大学 | 基于轨迹匹配的radio map转角矩阵自动生成的WLAN室内定位方法 |
| CN105865445A (zh) * | 2016-03-29 | 2016-08-17 | 全感(苏州)智能技术有限公司 | 一种惯性导航室内定位系统及其使用方法 |
| WO2017184040A1 (en) * | 2016-04-20 | 2017-10-26 | Telefonaktiebolaget Lm Ericsson (Publ) | A wireless device, a positioning node and methods therein for positioning of a wireless device in a wireless communications network |
| US10547976B2 (en) * | 2016-09-07 | 2020-01-28 | Invensense, Inc. | Method and system for assigning point of sale information |
| US20180143024A1 (en) * | 2016-11-22 | 2018-05-24 | Microsoft Technology Licensing, Llc | Automated generation of indoor map data |
| US10234299B2 (en) * | 2016-12-16 | 2019-03-19 | Osvaldo Morales | Geo-location tracking system and method |
| FR3063168B1 (fr) * | 2017-02-23 | 2022-06-03 | Intersec | Dispositif de determination de trajectoire |
| US10794986B2 (en) * | 2017-06-02 | 2020-10-06 | Apple Inc. | Extending a radio map |
| US10979854B2 (en) | 2017-06-02 | 2021-04-13 | Apple Inc. | Extending a radio map |
| JP6747404B2 (ja) * | 2017-08-23 | 2020-08-26 | 株式会社デンソー | 移動体通信システム |
| US11582576B2 (en) | 2018-06-01 | 2023-02-14 | Apple Inc. | Feature-based slam |
| US11788845B2 (en) | 2018-06-29 | 2023-10-17 | Baidu Usa Llc | Systems and methods for robust self-relocalization in a visual map |
| EP3680618A1 (en) * | 2019-01-10 | 2020-07-15 | Technische Universität München | Method and system for tracking a mobile device |
| WO2020175778A1 (en) | 2019-02-28 | 2020-09-03 | Samsung Electronics Co., Ltd. | Electronic device for supporting user state-based geofencing services |
| CN109974690B (zh) * | 2019-03-18 | 2021-07-09 | 汉海信息技术(上海)有限公司 | 车辆定位方法、设备及系统 |
| JP7243530B2 (ja) * | 2019-08-29 | 2023-03-22 | 新東工業株式会社 | 管理方法及び管理装置 |
| JP7226192B2 (ja) | 2019-08-29 | 2023-02-21 | 新東工業株式会社 | 管理方法及び移動端末 |
| CN110906830B (zh) * | 2019-12-17 | 2022-02-11 | 美国西北仪器公司 | 智能测距轮系统及其测距方法 |
| CN114095853B (zh) * | 2020-07-30 | 2023-04-14 | 华为技术有限公司 | 一种生成室内地图的方法和装置 |
| CN114485627B (zh) * | 2020-10-23 | 2023-10-31 | 广东博智林机器人有限公司 | 一种有轨小车的导航方法、装置、有轨小车及存储介质 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6581000B2 (en) | 2001-01-04 | 2003-06-17 | Carnegie Mellon University | Position location system and method |
| AU2003900863A0 (en) | 2003-02-26 | 2003-03-20 | Commonwealth Scientific & Industrial Research Organisation | Inertial and radiolocation method |
| US7236091B2 (en) | 2005-02-10 | 2007-06-26 | Pinc Solutions | Position-tracking system |
| US8836580B2 (en) * | 2005-05-09 | 2014-09-16 | Ehud Mendelson | RF proximity tags providing indoor and outdoor navigation and method of use |
| US7496445B2 (en) | 2005-04-27 | 2009-02-24 | Proxemics, Llc | Wayfinding |
| US7522999B2 (en) | 2006-01-17 | 2009-04-21 | Don Wence | Inertial waypoint finder |
| US8204684B2 (en) | 2007-06-28 | 2012-06-19 | Apple Inc. | Adaptive mobile device navigation |
| FR2918745B1 (fr) * | 2007-07-12 | 2009-09-18 | Commissariat Energie Atomique | Dispositif d'assistance a la navigation d'une personne |
| SG183690A1 (en) | 2007-08-06 | 2012-09-27 | Trx Systems Inc | Locating, tracking, and/or monitoring personnel and/or assets both indoors and outdoors |
| US8825388B2 (en) | 2010-07-13 | 2014-09-02 | Qualcomm Incorporated | Indoor likelihood heatmap |
| JP5059932B2 (ja) * | 2010-12-02 | 2012-10-31 | 株式会社エヌ・ティ・ティ・ドコモ | 移動端末、システム及び方法 |
| US8498811B2 (en) * | 2011-02-09 | 2013-07-30 | SenionLab AB | Method and device for indoor positioning |
| US20130191019A1 (en) * | 2012-01-23 | 2013-07-25 | Qualcomm Incorporated | Methods and apparatuses for use in mobile device state/trajectory estimation within an indoor environment |
-
2012
- 2012-10-22 US US13/657,428 patent/US9116000B2/en active Active
-
2013
- 2013-10-08 KR KR1020157013311A patent/KR20150074124A/ko not_active Application Discontinuation
- 2013-10-08 WO PCT/US2013/063756 patent/WO2014066024A1/en active Application Filing
- 2013-10-08 CN CN201380054624.5A patent/CN104736964B/zh active Active
- 2013-10-08 EP EP13783143.4A patent/EP2909582B1/en active Active
- 2013-10-08 JP JP2015537723A patent/JP6336992B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN104736964B (zh) | 2018-06-19 |
| JP2016502069A (ja) | 2016-01-21 |
| KR20150074124A (ko) | 2015-07-01 |
| WO2014066024A1 (en) | 2014-05-01 |
| EP2909582B1 (en) | 2019-05-29 |
| EP2909582A1 (en) | 2015-08-26 |
| CN104736964A (zh) | 2015-06-24 |
| US9116000B2 (en) | 2015-08-25 |
| US20140114561A1 (en) | 2014-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6336992B2 (ja) | モバイルデバイスのマップ支援センサーベース測位 | |
| CN108700421B (zh) | 使用离线地图信息辅助增强的便携式导航的方法和系统 | |
| US10281279B2 (en) | Method and system for global shape matching a trajectory | |
| JP6783751B2 (ja) | 地図情報支援の質を高められたポータブルナビゲーションを使用する方法および装置 | |
| US10126134B2 (en) | Method and system for estimating uncertainty for offline map information aided enhanced portable navigation | |
| US9146113B1 (en) | System and method for localizing a trackee at a location and mapping the location using transitions | |
| CN104395697B (zh) | 用于移动设备的协作式导航技术 | |
| US9182240B2 (en) | Method, apparatus and system for mapping a course of a mobile device | |
| US20130065604A1 (en) | Method for seamless transition from urban outdoor environments to indoor navigation | |
| EP2769333A1 (en) | Image and video based pedestrian traffic estimation | |
| JP2017520762A (ja) | 推定された軌道の潜在的な妨害の尺度に基づく、移動体デバイスのポジションの不確実性 | |
| US20220357463A1 (en) | Delivery detection-based positioning information extraction | |
| YuTian et al. | Integrated Bluetooth Fingerprinting and Pedestrian Dead Reckoning for Indoor Positioning on Apple’s iOS platform | |
| Bhatt et al. | Walking artifacts mitigation for improved heading estimation in a reduced multi-sensor configuration |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160909 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160909 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6336992 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |