JP6301113B2 - 超音波診断装置及び超音波診断装置用のプログラム - Google Patents
超音波診断装置及び超音波診断装置用のプログラム Download PDFInfo
- Publication number
- JP6301113B2 JP6301113B2 JP2013238907A JP2013238907A JP6301113B2 JP 6301113 B2 JP6301113 B2 JP 6301113B2 JP 2013238907 A JP2013238907 A JP 2013238907A JP 2013238907 A JP2013238907 A JP 2013238907A JP 6301113 B2 JP6301113 B2 JP 6301113B2
- Authority
- JP
- Japan
- Prior art keywords
- scan
- ultrasonic
- image data
- dimensional
- contrast
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/481—Diagnostic techniques involving the use of contrast agent, e.g. microbubbles introduced into the bloodstream
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
- A61B8/5253—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode combining overlapping images, e.g. spatial compounding
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Hematology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Computer Graphics (AREA)
- General Engineering & Computer Science (AREA)
Description
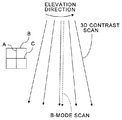
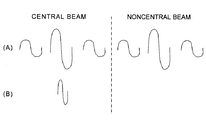
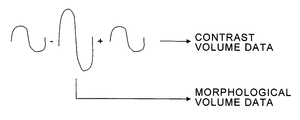
また、本発明の実施形態に係る超音波診断装置は、送受信部、信号処理部、画像生成部、入力装置及びスキャン制御部を備える。送受信部は、第1の超音波および前記第1の超音波の位相を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンを超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する。信号処理部は、前記複数の第1の受信信号を合成し、複数の合成信号を生成する。画像生成部は、前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する。入力装置は、前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための装置である。スキャン制御部は、前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御する。
また、本発明の実施形態に係る超音波診断装置用のプログラムは、コンピュータを、送受信部、信号処理部、画像生成部、入力装置及びスキャン制御部として機能させる。送受信部は、第1の超音波および前記第1の超音波の振幅を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンを超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する。信号処理部は、前記複数の第1の受信信号を合成し、複数の合成信号を生成する。画像生成部は、前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する。入力装置は、前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための装置である。スキャン制御部は、前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御する。
また、本発明の実施形態に係る超音波診断装置用のプログラムは、コンピュータを、送受信部、信号処理部、画像生成部、入力装置及びスキャン制御部として機能させる。送受信部は、第1の超音波および前記第1の超音波の位相を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンを超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する。信号処理部は、前記複数の第1の受信信号を合成し、複数の合成信号を生成する。画像生成部は、前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する。入力装置は、前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための装置である。スキャン制御部は、前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御する。
2 装置本体
3 超音波プローブ
4 制御系
5 データ処理系
6 記憶部
7 表示装置
8 入力装置
9 送受信ユニット
10 スキャン制御部
11 Bモード処理部
12 ドプラ処理部
13 画像生成部
P 被検体
Claims (13)
- 第1の超音波および前記第1の超音波の振幅を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、
前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンと、
を超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する送受信部と、
前記複数の第1の受信信号を合成し、複数の合成信号を生成する信号処理部と、
前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する画像生成部と、
前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための入力装置と、
前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御するスキャン制御部と、
を備える超音波診断装置。 - 第1の超音波および前記第1の超音波の位相を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、
前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンと、
を超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する送受信部と、
前記複数の第1の受信信号を合成し、複数の合成信号を生成する信号処理部と、
前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する画像生成部と、
前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための入力装置と、
前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御するスキャン制御部と、
を備える超音波診断装置。 - 前記送受信部は、前記3次元領域よりも狭い単一又は複数の前記2次元領域から前記複数の第2の反射波を受信する第2のスキャンを前記超音波プローブに実行させるように構成される請求項1又は2記載の超音波診断装置。
- 前記送受信部は、アジマス方向又はエレベーション方向を法線方向とする単一又は複数の前記2次元領域から前記複数の第2の反射波を受信する第2のスキャンを前記超音波プローブに実行させるように構成される請求項1乃至3のいずれか1項に記載の超音波診断装置。
- 前記送受信部は、前記3次元領域を時間的に等間隔に分割するタイミングで前記複数の第2の反射波を複数回受信する第2のスキャンを前記超音波プローブに実行させるように構成される請求項1乃至4のいずれか1項に記載の超音波診断装置。
- 前記送受信部は、前記3次元領域を空間的に2分割し、かつアジマス方向又はエレベーション方向を法線方向とする前記2次元領域から前記複数の第2の反射波を受信する第2のスキャンを前記超音波プローブに実行させるように構成される請求項1乃至5のいずれか1項に記載の超音波診断装置。
- 前記送受信部は、前記2次元超音波画像データのフレームレートが前記更新レート比に対応するフレームレートとなるように前記複数の第2の反射波の受信タイミングを設定するように構成される請求項1乃至6のいずれか1項に記載の超音波診断装置。
- 前記送受信部は、前記入力装置から入力される前記更新レート比の指示情報に従って前記2次元超音波画像データのフレームレートを調整できるように構成される請求項1乃至7のいずれか1項に記載の超音波診断装置。
- 前記送受信部は、前記第1のスキャンにおいて、前記第1の超音波および前記第1の超音波の前記振幅を変調した前記超音波として、それぞれ超音波造影ボリューム画像データの生成に適した周波数特性を有する超音波を前記超音波プローブから送信させる一方、前記第2のスキャンにおいて、前記第2の超音波として、超音波形態画像データの生成に適した周波数特性を有する超音波を前記超音波プローブから送信させるように構成される請求項1記載の超音波診断装置。
- 前記送受信部は、前記第1のスキャンにおいて、前記第1の超音波および前記第1の超音波の前記位相を変調した前記超音波として、それぞれ超音波造影ボリューム画像データの生成に適した周波数特性を有する超音波を前記超音波プローブから送信させる一方、前記第2のスキャンにおいて、前記第2の超音波として、超音波形態画像データの生成に適した周波数特性を有する超音波を前記超音波プローブから送信させるように構成される請求項2記載の超音波診断装置。
- 前記送受信部は、複数の超音波振動子を用いて互いに異なる方向から同時に超音波を受信する並列同時受信によって前記第1のスキャン及び前記第2のスキャンの少なくとも一方を前記超音波プローブに実行させるように構成される請求項1乃至10のいずれか1項に記載の超音波診断装置。
- コンピュータを、
第1の超音波および前記第1の超音波の振幅を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、
前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンと、
を超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する送受信部、
前記複数の第1の受信信号を合成し、複数の合成信号を生成する信号処理部、
前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する画像生成部、
前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための入力装置、及び
前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御するスキャン制御部、
として機能させる超音波診断装置用のプログラム。 - コンピュータを、
第1の超音波および前記第1の超音波の位相を変調した超音波を3次元領域に3次元的に分布する複数の走査線それぞれに少なくとも1回ずつ送信し、当該送信に基づく複数の第1の反射波を受信する第1のスキャンと、
前記第1のスキャンの途中において、第2の超音波を2次元領域に2次元的に分布する複数の走査線それぞれに少なくとも1回送信し、当該送信に基づく複数の第2の反射波を受信する第2のスキャンと、
を超音波プローブに実行させ、前記超音波プローブから前記複数の第1の反射波に基づく複数の第1の受信信号および前記複数の第2の反射波に基づく複数の第2の受信信号を取得する送受信部、
前記複数の第1の受信信号を合成し、複数の合成信号を生成する信号処理部、
前記複数の合成信号に基づいて3次元超音波画像データを生成し、前記複数の第2の受信信号に基づいて2次元超音波画像データを生成する画像生成部、
前記3次元超音波画像データに対する前記2次元超音波画像データの更新レート比を設定するための入力装置、及び
前記3次元領域に分布する複数の走査線それぞれから前記第1の反射波を1回受信する途中において前記2次元領域に分布する複数の走査線から前記第2の反射波を受信する回数を前記更新レート比に基づいて決定し、前記第1のスキャンによって前記3次元的に分布する複数の走査線の一部から前記複数の第1の反射波の一部が受信された後に、前記第2のスキャンによって前記2次元的に分布する複数の走査線から前記複数の第2の反射波が受信され、前記複数の第2の反射波が受信された後に、前記第1のスキャンによって前記3次元的に分布する複数の走査線の残りの全部又は一部から前記複数の第1の反射波の残りの全部又は一部が受信されるように前記送受信部を制御するスキャン制御部、
として機能させる超音波診断装置用のプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013238907A JP6301113B2 (ja) | 2013-11-19 | 2013-11-19 | 超音波診断装置及び超音波診断装置用のプログラム |
| US14/518,440 US20150141828A1 (en) | 2013-11-19 | 2014-10-20 | Ultrasonic diagnostic apparatus and ultrasonic diagnostic method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013238907A JP6301113B2 (ja) | 2013-11-19 | 2013-11-19 | 超音波診断装置及び超音波診断装置用のプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015097634A JP2015097634A (ja) | 2015-05-28 |
| JP2015097634A5 JP2015097634A5 (ja) | 2016-12-08 |
| JP6301113B2 true JP6301113B2 (ja) | 2018-03-28 |
Family
ID=53173991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013238907A Active JP6301113B2 (ja) | 2013-11-19 | 2013-11-19 | 超音波診断装置及び超音波診断装置用のプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20150141828A1 (ja) |
| JP (1) | JP6301113B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108024793B (zh) * | 2015-09-25 | 2020-11-17 | 奥林巴斯株式会社 | 超声波观测装置和超声波观测装置的工作方法 |
| US10835212B2 (en) * | 2016-04-01 | 2020-11-17 | Canon Medical Systems Corporation | Medical image processing apparatus |
| TWI743411B (zh) * | 2017-11-08 | 2021-10-21 | 美商富士膠片索諾聲公司 | 具有高頻細節的超音波系統 |
| JP7313902B2 (ja) * | 2018-05-22 | 2023-07-25 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置 |
| JP7308600B2 (ja) * | 2018-09-12 | 2023-07-14 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置、医用画像処理装置、及び超音波画像表示プログラム |
| CN112638270B (zh) * | 2018-09-19 | 2024-08-30 | 深圳迈瑞生物医疗电子股份有限公司 | 一种多工模式下的超声成像方法和超声成像系统 |
| US20210183521A1 (en) * | 2019-12-13 | 2021-06-17 | Korea Advanced Institute Of Science And Technology | Method and apparatus for quantitative imaging using ultrasound data |
| CN112155595B (zh) * | 2020-10-10 | 2023-07-07 | 达闼机器人股份有限公司 | 超声波诊断设备、超声探头、图像的生成方法及存储介质 |
| JP2024001441A (ja) * | 2022-06-22 | 2024-01-10 | 富士フイルム株式会社 | 画像表示装置および画像表示装置の制御方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3892594B2 (ja) * | 1998-10-07 | 2007-03-14 | 株式会社東芝 | 超音波診断装置 |
| JP3847976B2 (ja) * | 1998-10-14 | 2006-11-22 | 株式会社東芝 | 超音波診断装置 |
| JP3750972B2 (ja) * | 1998-11-06 | 2006-03-01 | 株式会社東芝 | 3次元超音波診断装置 |
| US6245017B1 (en) * | 1998-10-30 | 2001-06-12 | Kabushiki Kaisha Toshiba | 3D ultrasonic diagnostic apparatus |
| US6419633B1 (en) * | 2000-09-15 | 2002-07-16 | Koninklijke Philips Electronics N.V. | 2D ultrasonic transducer array for two dimensional and three dimensional imaging |
| JP4764125B2 (ja) * | 2005-09-21 | 2011-08-31 | 株式会社東芝 | 超音波診断装置、及び超音波診断装置の制御プログラム |
| JP4945277B2 (ja) * | 2007-03-22 | 2012-06-06 | 株式会社東芝 | 超音波診断装置 |
| JP5087324B2 (ja) * | 2007-06-12 | 2012-12-05 | 株式会社東芝 | 超音波診断装置 |
| WO2009130647A1 (en) * | 2008-04-24 | 2009-10-29 | Koninklijke Philips Electronics N.V. | Motion compensated micro-vasculature imaging |
| JP5322522B2 (ja) * | 2008-07-11 | 2013-10-23 | 株式会社東芝 | 超音波診断装置 |
| US20100081936A1 (en) * | 2008-09-29 | 2010-04-01 | Kazuhito Nakata | Ultrasonic diagnosis apparatus and ultrasonic transmission/reception method |
| JP5773642B2 (ja) * | 2010-12-27 | 2015-09-02 | 株式会社東芝 | 超音波診断装置、医用画像処理方法および医用画像処理プログラム |
| JP2012217583A (ja) * | 2011-04-07 | 2012-11-12 | Toshiba Corp | 超音波診断装置及び画像生成制御プログラム |
-
2013
- 2013-11-19 JP JP2013238907A patent/JP6301113B2/ja active Active
-
2014
- 2014-10-20 US US14/518,440 patent/US20150141828A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20150141828A1 (en) | 2015-05-21 |
| JP2015097634A (ja) | 2015-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6301113B2 (ja) | 超音波診断装置及び超音波診断装置用のプログラム | |
| JP4260920B2 (ja) | 超音波診断装置 | |
| US7874988B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic transmission method | |
| JP5366385B2 (ja) | 超音波診断装置及び超音波走査プログラム | |
| JP6193124B2 (ja) | 超音波診断装置及び超音波画像生成方法 | |
| US20070038103A1 (en) | Apparatus for obtaining ultrasonic image and method of obtaining ultrasonic image | |
| CN103315769B (zh) | 超声波诊断装置、图像处理装置以及图像处理方法 | |
| JP2008099729A (ja) | 超音波診断装置、及び超音波診断装置の制御プログラム | |
| US10575823B2 (en) | Medical diagnostic apparatus, medical image processing apparatus and medical image processing method | |
| US20200367862A1 (en) | Ultrasound diagnostic device and ultrasound diagnostic device control method | |
| JP2009131420A (ja) | 超音波画像診断装置 | |
| JP2009061086A (ja) | 超音波診断装置、並びに、画像処理方法及びプログラム | |
| JP5349173B2 (ja) | 超音波診断装置及び超音波診断装置制御プログラム | |
| JP5388416B2 (ja) | 超音波診断装置および超音波診断装置の制御プログラム | |
| US9354300B2 (en) | Ultrasound diagnostic apparatus and ultrasound image producing method | |
| JP4381028B2 (ja) | 超音波診断装置 | |
| JP4537280B2 (ja) | 超音波診断装置 | |
| US11832993B2 (en) | Ultrasound diagnostic device and ultrasound signal processing method | |
| JP5317391B2 (ja) | 超音波診断装置 | |
| JP7273519B2 (ja) | 超音波診断装置、及び学習プログラム | |
| JP4393572B2 (ja) | 超音波診断装置 | |
| JP6727363B2 (ja) | 医用診断装置、医用画像処理装置及び医用画像処理方法 | |
| JP2013013452A (ja) | 超音波診断装置及び制御プログラム | |
| JP2007325664A (ja) | 超音波診断装置 | |
| JP2010005138A (ja) | 超音波診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161017 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161017 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161018 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161017 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6301113 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |