JP6237326B2 - 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム - Google Patents
姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム Download PDFInfo
- Publication number
- JP6237326B2 JP6237326B2 JP2014034439A JP2014034439A JP6237326B2 JP 6237326 B2 JP6237326 B2 JP 6237326B2 JP 2014034439 A JP2014034439 A JP 2014034439A JP 2014034439 A JP2014034439 A JP 2014034439A JP 6237326 B2 JP6237326 B2 JP 6237326B2
- Authority
- JP
- Japan
- Prior art keywords
- marker
- image
- unit
- imaging unit
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/245—Aligning, centring, orientation detection or correction of the image by locating a pattern; Special marks for positioning
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- User Interface Of Digital Computer (AREA)
Description
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を制限するものではないことを理解されたい。
なお、マーカの四隅及び自然特徴点の三次元座標は、複数の画像からその画像に写っている物体の位置を求める様々な方法、例えば、山田他、「2画像からの3次元復元の最新アルゴリズム」、情報処理学会研究報告、vol.2009-CVIM-168-15、pp.1-8、2009年に開示された方法に従って求められてもよい。
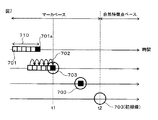
また制御部6は、撮像部3から画像を受け取る度に、その画像に写っているマーカまたは自然特徴点に基づいて撮像部3の位置及び姿勢を推定する。
なお、以下では、マーカに基づく撮像部3の位置及び姿勢の推定処理を、マーカベースの姿勢推定処理と呼ぶ。一方、自然特徴点に基づく撮像部3の位置及び姿勢の推定処理を、自然特徴点ベースの姿勢推定処理と呼ぶ。

この変換行列は次式で表される。
また、カメラ座標系と、撮像部3により生成される画像上の座標系との関係は、透視変換モデルに従って次式で表される。
また、自然特徴点ベースの姿勢推定処理への移行準備の開始後に取得された画像に関して、上記の何れの失敗指標についても移行準備開始基準が満たされなくなると、移行準備開始判定部13は、初期姿勢設定部14に、その移行準備を停止する旨通知してもよい。あるいは、連続する複数の画像に関して、上記の何れの失敗指標についても移行準備開始基準が満たされなくなったときに、移行準備開始判定部13は、初期姿勢設定部14に、その移行準備を停止する旨通知してもよい。
(1)先ず、初期姿勢設定部14は、撮像部3の位置及び姿勢を表す6次元の状態量(x,y,z,rx,ry,rz)と、その状態量の尤度とを持つ粒子をランダムに複数生成する。なお、2順目以降では、初期姿勢設定部14は、残っている粒子の状態量はそのままとする。そして初期姿勢設定部14は、粒子数が所定数に達するまで、新規に粒子を生成する。また、各粒子の尤度は同一とする。
(5)初期姿勢設定部14は、残りの粒子の状態量を、その粒子の尤度で重みづけ平均することで、撮像部3の位置及び姿勢の推定値を求める。
特徴点ベース姿勢推定部16は、(2)式及び(3)式に従って、各自然特徴点801を画像平面800に投影して、各自然特徴点の世界座標系の座標に対応する画像平面800上の投影点802の座標を求める。そして特徴点ベース姿勢推定部16は、各自然特徴点について、投影点802と、画像から検出された、対応する自然特徴点803間の距離の二乗和を評価値として算出する。
マーカ再検出判定部17は、マーカの探索範囲をマーカ検出部11に通知する。そしてマーカ再検出判定部17は、その探索範囲内で、マーカ検出部11にマーカ検出処理を実行させる。
一方、移行判定部18は、自然特徴点ベースの姿勢推定処理が実行されている間において、画像からマーカが検出できると、マーカベースの姿勢推定処理へ移行すると判定する。そして移行判定部18は、特徴点検出部15及び特徴点ベース姿勢推定部16を停止させ、マーカ検出部11及びマーカベース姿勢推定部12を起動させる。なお、移行判定部18は、連続する数フレームにわたって画像からマーカが検出された場合に、マーカベースの姿勢推定処理へ移行すると判定してもよい。
2 表示部
3 撮像部
4 記憶媒体アクセス装置
5 記憶部
6 制御部
7 筐体
11 マーカ検出部
12 マーカベース姿勢推定部
13 移行準備開始判定部
14 初期姿勢設定部
15 特徴点検出部
16 特徴点ベース姿勢推定部
17 マーカ再検出判定部
18 移行判定部
Claims (8)
- 所定の撮影周期にて、撮影した範囲の画像を生成する撮像部と、
予め設置されたマーカの実空間での位置及び前記マーカの周囲の複数の特徴点の実空間での位置を記憶する記憶部と、
前記画像から前記マーカを検出するマーカ検出部と、
前記画像上での前記マーカの位置及び実空間での前記マーカの位置に基づいて前記撮像部の位置及び姿勢を推定するマーカベース姿勢推定部と、
前記画像から前記複数の特徴点を検出する特徴点検出部と、
前記画像上での前記複数の特徴点の位置と、実空間での前記複数の特徴点の位置と、前記撮像部の位置及び姿勢の初期値とに基づいて前記撮像部の位置及び姿勢を推定する特徴点ベース姿勢推定部と、
前記画像から前記マーカが検出されなかった場合に、当該画像及び当該画像以降に取得される画像について、前記特徴点検出部に前記複数の特徴点を検出させ、かつ、前記特徴点ベース姿勢推定部に前記撮像部の位置及び姿勢を推定させる移行判定部と、
前記マーカベース姿勢推定部により前記撮像部の位置及び姿勢が推定されている間に取得された第1の画像から、前記マーカの検出に失敗する可能性を表す少なくとも一つの失敗指標を算出し、当該少なくとも一つの失敗指標が移行準備開始基準を満たすか否か判定する移行準備開始判定部と、
前記少なくとも一つの失敗指標が前記移行準備開始基準を満たす場合、前記第1の画像よりも前の所定期間に取得された前記画像上での前記マーカの位置に基づいて推定された前記撮像部の位置及び姿勢から、前記撮像部の位置及び姿勢の前記初期値を設定する初期姿勢設定部と、
を有する姿勢推定装置。 - 前記移行準備開始判定部は、前記第1の画像上での前記マーカの位置または前記マーカの移動速度と、前記画像上での前記マーカの面積と、前記マーカの法線方向と前記撮像部の光軸方向とがなす角と、前記マーカの検出の信頼度のうちの少なくとも一つを前記失敗指標として算出する、請求項1に記載の姿勢推定装置。
- 前記初期姿勢設定部は、前記少なくとも一つの失敗指標が前記移行準備開始基準を満たす場合、前記所定期間に取得された前記画像上での前記マーカの位置に基づいて推定された前記撮像部の位置及び姿勢に対して予測フィルタを適用することで推定された前記撮像部の位置及び姿勢を前記初期値とする、請求項1または2に記載の姿勢推定装置。
- 前記特徴点ベース姿勢推定部により前記撮像部の位置及び姿勢が推定されている間に取得された第2の画像から前記マーカの検出に成功する可能性を表す少なくとも一つの成功指標を算出し、当該少なくとも一つの成功指標が再移行準備開始基準を満たすか否か判定し、当該再移行準備開始基準が満たされる場合、前記マーカ検出部に前記第2の画像から前記マーカを検出させるマーカ再検出判定部をさらに有し、
前記移行判定部は、前記マーカ検出部が前記第2の画像から前記マーカを検出できた場合、前記第2の画像以降に取得される画像について、前記マーカ検出部に前記マーカを検出させ、かつ、前記マーカベース姿勢推定部に前記撮像部の位置及び姿勢を推定させる、請求項1〜3の何れか一項に記載の姿勢推定装置。 - 前記マーカ再検出判定部は、前記マーカの実空間での位置を、推定された前記撮像部の位置及び姿勢に基づいて前記第2の画像に投影して得られる前記第2の画像上での前記マーカを含み、かつ、前記第2の画像よりも小さい探索範囲を設定し、当該探索範囲内で前記マーカ検出部にマーカを検出させる、請求項4に記載の姿勢推定装置。
- 前記マーカ再検出判定部は、前記マーカの実空間での位置を、推定された前記撮像部の位置及び姿勢に基づいて前記第2の画像に投影して得られる前記第2の画像上での前記マーカの位置と、前記第2の画像上での前記マーカの面積と、前記マーカの法線方向と前記撮像部の光軸方向とがなす角のうちの少なくとも一つを前記成功指標として算出する、請求項4または5に記載の姿勢推定装置。
- 所定の撮影周期にて撮影した範囲の画像を生成する撮像部から取得した前記画像から予め設置されたマーカを検出し、
前記画像上での前記マーカの位置と実空間での前記マーカの位置に基づいて前記撮像部の位置及び姿勢を推定し、
前記画像から前記マーカが検出されなかった場合に、当該画像及び当該画像以降に取得される画像から前記マーカの周囲の複数の特徴点を検出し、
前記画像上での前記複数の特徴点の位置と、実空間での前記複数の特徴点の位置と、前記撮像部の位置及び姿勢の初期値とに基づいて前記撮像部の位置及び姿勢を推定し、
前記画像上での前記マーカの位置と実空間での前記マーカの位置に基づいて前記撮像部の位置及び姿勢が推定されている間に取得された第1の画像から、前記マーカの検出に失敗する可能性を表す少なくとも一つの失敗指標を算出し、当該少なくとも一つの失敗指標が移行準備開始基準を満たすか否か判定し、
前記少なくとも一つの失敗指標が前記移行準備開始基準を満たす場合、前記第1の画像よりも前の所定期間に取得された前記画像上での前記マーカの位置に基づいて推定された前記撮像部の位置及び姿勢から、前記撮像部の位置及び姿勢の前記初期値を設定する、
ことを含む姿勢推定方法。 - 所定の撮影周期にて撮影した範囲の画像を生成する撮像部から取得した前記画像から予め設置されたマーカを検出し、
前記画像上での前記マーカの位置と実空間での前記マーカの位置に基づいて前記撮像部の位置及び姿勢を推定し、
前記画像から前記マーカが検出されなかった場合に、当該画像及び当該画像以降に取得される画像から前記マーカの周囲の複数の特徴点を検出し、
前記画像上での前記複数の特徴点の位置と、実空間での前記複数の特徴点の位置と、前記撮像部の位置及び姿勢の初期値とに基づいて前記撮像部の位置及び姿勢を推定し、
前記画像上での前記マーカの位置と実空間での前記マーカの位置に基づいて前記撮像部の位置及び姿勢が推定されている間に取得された第1の画像から、前記マーカの検出に失敗する可能性を表す少なくとも一つの失敗指標を算出し、当該少なくとも一つの失敗指標が移行準備開始基準を満たすか否か判定し、
前記少なくとも一つの失敗指標が前記移行準備開始基準を満たす場合、前記第1の画像よりも前の所定期間に取得された前記画像上での前記マーカの位置に基づいて推定された前記撮像部の位置及び姿勢から、前記撮像部の位置及び姿勢の前記初期値を設定する、
ことをコンピュータに実行させるための姿勢推定用コンピュータプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034439A JP6237326B2 (ja) | 2014-02-25 | 2014-02-25 | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム |
| US14/611,330 US9542745B2 (en) | 2014-02-25 | 2015-02-02 | Apparatus and method for estimating orientation of camera |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034439A JP6237326B2 (ja) | 2014-02-25 | 2014-02-25 | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015158461A JP2015158461A (ja) | 2015-09-03 |
| JP6237326B2 true JP6237326B2 (ja) | 2017-11-29 |
Family
ID=53882696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014034439A Expired - Fee Related JP6237326B2 (ja) | 2014-02-25 | 2014-02-25 | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9542745B2 (ja) |
| JP (1) | JP6237326B2 (ja) |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6237326B2 (ja) * | 2014-02-25 | 2017-11-29 | 富士通株式会社 | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム |
| US10462406B2 (en) * | 2014-08-01 | 2019-10-29 | Sony Corporation | Information processing apparatus and information processing method |
| JP6575325B2 (ja) * | 2015-11-27 | 2019-09-18 | 富士通株式会社 | カメラ位置姿勢推定装置、カメラ位置姿勢推定方法およびカメラ位置姿勢推定プログラム |
| JP2017129567A (ja) * | 2016-01-20 | 2017-07-27 | キヤノン株式会社 | 情報処理装置、情報処理方法、プログラム |
| US10685490B2 (en) * | 2016-03-10 | 2020-06-16 | Canon Kabushiki Kaisha | Information processing apparatus, information processing method, and storage medium |
| JP6744747B2 (ja) * | 2016-04-01 | 2020-08-19 | キヤノン株式会社 | 情報処理装置およびその制御方法 |
| JP6681278B2 (ja) * | 2016-06-01 | 2020-04-15 | 京セラ株式会社 | 位置検出システム及び位置検出方法 |
| DE102016121281A1 (de) | 2016-11-08 | 2018-05-09 | 3Dqr Gmbh | Verfahren und Vorrichtung zum Überlagern eines Abbilds einer realen Szenerie mit virtuellen Bild- und Audiodaten und ein mobiles Gerät |
| JP6917701B2 (ja) * | 2016-11-30 | 2021-08-11 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法及びプログラム |
| US10963055B2 (en) | 2016-12-15 | 2021-03-30 | Sony Interactive Entertainment Inc. | Vibration device and control system for presenting corrected vibration data |
| US10963054B2 (en) | 2016-12-15 | 2021-03-30 | Sony Interactive Entertainment Inc. | Information processing system, vibration control method and program |
| US10969867B2 (en) | 2016-12-15 | 2021-04-06 | Sony Interactive Entertainment Inc. | Information processing system, controller device, controller device control method and program |
| US10957068B2 (en) * | 2017-01-06 | 2021-03-23 | Canon Kabushiki Kaisha | Information processing apparatus and method of controlling the same |
| JP6894707B2 (ja) * | 2017-01-06 | 2021-06-30 | キヤノン株式会社 | 情報処理装置およびその制御方法、プログラム |
| JP6822209B2 (ja) * | 2017-02-24 | 2021-01-27 | セイコーエプソン株式会社 | プロジェクターおよびプロジェクターの制御方法 |
| JP6922348B2 (ja) * | 2017-03-31 | 2021-08-18 | 富士通株式会社 | 情報処理装置、方法、及びプログラム |
| EP3385912B1 (en) * | 2017-04-06 | 2022-08-24 | Hexagon Technology Center GmbH | Near field manoeuvring for ar-devices using image tracking |
| WO2018193513A1 (ja) | 2017-04-18 | 2018-10-25 | 株式会社ソニー・インタラクティブエンタテインメント | 振動制御装置 |
| WO2018193514A1 (ja) | 2017-04-18 | 2018-10-25 | 株式会社ソニー・インタラクティブエンタテインメント | 振動制御装置 |
| US11013990B2 (en) | 2017-04-19 | 2021-05-25 | Sony Interactive Entertainment Inc. | Vibration control apparatus |
| JP6757466B2 (ja) | 2017-04-26 | 2020-09-16 | 株式会社ソニー・インタラクティブエンタテインメント | 振動制御装置 |
| JP6762913B2 (ja) * | 2017-07-11 | 2020-09-30 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| JP6771435B2 (ja) * | 2017-07-20 | 2020-10-21 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置および位置情報取得方法 |
| JP6721550B2 (ja) * | 2017-08-04 | 2020-07-15 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置および位置情報取得方法 |
| US10235774B1 (en) | 2017-11-14 | 2019-03-19 | Caterpillar Inc. | Method and system for calibration of an image capturing device mounted on a machine |
| CN108062776B (zh) * | 2018-01-03 | 2019-05-24 | 百度在线网络技术(北京)有限公司 | 相机姿态跟踪方法和装置 |
| US11364004B2 (en) * | 2018-02-08 | 2022-06-21 | Covidien Lp | System and method for pose estimation of an imaging device and for determining the location of a medical device with respect to a target |
| WO2019234936A1 (ja) * | 2018-06-08 | 2019-12-12 | マクセル株式会社 | 携帯端末、カメラ位置推定システム、カメラ位置推定方法および標識板 |
| JP7225762B2 (ja) * | 2018-12-17 | 2023-02-21 | カシオ計算機株式会社 | 自己位置推定装置、自己位置推定方法及びプログラム |
| WO2020152810A1 (ja) * | 2019-01-23 | 2020-07-30 | 株式会社ソシオネクスト | カメラ情報算出装置、システム、カメラ情報算出方法およびプログラム |
| WO2021215246A1 (ja) * | 2020-04-21 | 2021-10-28 | ソニーグループ株式会社 | 画像処理装置、画像処理方法、および、プログラム |
| KR20230027537A (ko) * | 2021-08-19 | 2023-02-28 | 엘지전자 주식회사 | 이동 단말기 및 그의 동작 방법 |
| JP7533402B2 (ja) * | 2021-09-08 | 2024-08-14 | 株式会社豊田自動織機 | 姿勢推定装置、産業車両、姿勢推定プログラム、及び記憶媒体 |
| JP7669887B2 (ja) * | 2021-09-16 | 2025-04-30 | カシオ計算機株式会社 | 情報処理装置、プログラム |
| JP2024082464A (ja) * | 2022-12-08 | 2024-06-20 | 株式会社豊田自動織機 | 画像処理装置 |
| US20240386750A1 (en) * | 2023-05-19 | 2024-11-21 | WowYow, Inc. | Markerless motion capture |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4095320B2 (ja) | 2002-03-19 | 2008-06-04 | キヤノン株式会社 | センサ較正装置、センサ較正方法、プログラム、記憶媒体 |
| JP2003281504A (ja) * | 2002-03-22 | 2003-10-03 | Canon Inc | 撮像部位置姿勢推定装置及びその制御方法並びに複合現実感提示システム |
| NZ539632A (en) * | 2002-10-22 | 2008-01-31 | Artoolworks | Tracking a surface in a 3-dimensional scene using natural visual features of the surface |
| WO2005010817A1 (ja) * | 2003-07-24 | 2005-02-03 | Olympus Corporation | 画像処理装置 |
| JP3991020B2 (ja) * | 2003-09-30 | 2007-10-17 | キヤノン株式会社 | 画像表示方法及び画像表示システム |
| JP4532982B2 (ja) | 2004-05-14 | 2010-08-25 | キヤノン株式会社 | 配置情報推定方法および情報処理装置 |
| JP2013141049A (ja) * | 2010-03-24 | 2013-07-18 | Hitachi Ltd | 世界座標系データベースを利用したサーバ及び端末 |
| CA2870480A1 (en) * | 2012-04-13 | 2013-10-17 | Lightcraft Technology Llc | Hybrid precision tracking |
| JP6237326B2 (ja) * | 2014-02-25 | 2017-11-29 | 富士通株式会社 | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム |
-
2014
- 2014-02-25 JP JP2014034439A patent/JP6237326B2/ja not_active Expired - Fee Related
-
2015
- 2015-02-02 US US14/611,330 patent/US9542745B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20150243016A1 (en) | 2015-08-27 |
| US9542745B2 (en) | 2017-01-10 |
| JP2015158461A (ja) | 2015-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6237326B2 (ja) | 姿勢推定装置、姿勢推定方法及び姿勢推定用コンピュータプログラム | |
| US11830216B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN110411441B (zh) | 用于多模态映射和定位的系统和方法 | |
| JP6507730B2 (ja) | 座標変換パラメータ決定装置、座標変換パラメータ決定方法及び座標変換パラメータ決定用コンピュータプログラム | |
| US9208395B2 (en) | Position and orientation measurement apparatus, position and orientation measurement method, and storage medium | |
| TWI419081B (zh) | 提供擴增實境的標籤追蹤方法、系統與電腦程式產品 | |
| JP6435750B2 (ja) | 3次元座標算出装置、3次元座標算出方法および3次元座標算出プログラム | |
| US9420265B2 (en) | Tracking poses of 3D camera using points and planes | |
| JP5746477B2 (ja) | モデル生成装置、3次元計測装置、それらの制御方法及びプログラム | |
| US9519968B2 (en) | Calibrating visual sensors using homography operators | |
| US7554575B2 (en) | Fast imaging system calibration | |
| US20210374978A1 (en) | Capturing environmental scans using anchor objects for registration | |
| JP6609640B2 (ja) | 電子デバイス上における環境マッピング用のフィーチャ・データの管理 | |
| EP3028252A1 (en) | Rolling sequential bundle adjustment | |
| WO2016029939A1 (en) | Method and system for determining at least one image feature in at least one image | |
| CN102612704A (zh) | 用于提供针对图像的至少一个特征的描述符的方法和用于匹配特征的方法 | |
| Kurz et al. | Gravity-aware handheld augmented reality | |
| JP2017146938A (ja) | 書籍検出装置、書籍検出方法及び書籍検出用コンピュータプログラム | |
| CN112912936A (zh) | 混合现实系统、程序、移动终端装置和方法 | |
| US11935286B2 (en) | Method and device for detecting a vertical planar surface | |
| CN104937608B (zh) | 道路区域检测 | |
| Fioraio et al. | SlamDunk: affordable real-time RGB-D SLAM | |
| Li et al. | A hybrid pose tracking approach for handheld augmented reality | |
| US20240083038A1 (en) | Assistance system, image processing device, assistance method and non-transitory computer-readable storage medium | |
| Mair et al. | Efficient camera-based pose estimation for real-time applications |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161102 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6237326 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |