JP6231816B2 - 撮像装置およびその制御方法、プログラム並びに記憶媒体 - Google Patents
撮像装置およびその制御方法、プログラム並びに記憶媒体 Download PDFInfo
- Publication number
- JP6231816B2 JP6231816B2 JP2013170818A JP2013170818A JP6231816B2 JP 6231816 B2 JP6231816 B2 JP 6231816B2 JP 2013170818 A JP2013170818 A JP 2013170818A JP 2013170818 A JP2013170818 A JP 2013170818A JP 6231816 B2 JP6231816 B2 JP 6231816B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- motion vector
- geometric deformation
- imaging
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Studio Devices (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
以下、本発明を、例えば、動画や静止画を撮影するデジタルビデオカメラなどの撮像装置に適用した実施形態について説明する。

焦点距離が短い場合には、あおり、回転、並進成分のいずれも大きい。一方、焦点距離が中程度の場合には、回転、並進成分は大きく、あおり成分は小さい。また、焦点距離が長い場合には、並進成分は大きく、あおりと回転の成分は小さい。
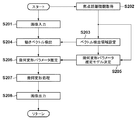
(1)焦点距離が所定の閾値T1より短い場合は、あおり、回転、並進成分の全ての成分を防振対象と判定する。
(2)焦点距離が所定の閾値T1とT2(T1<T2)の間である場合は、支配的な回転、並進成分だけを防振対象と判定する。
(3)焦点距離が所定の閾値T2より長い場合は、支配的な並進成分だけを防振対象と判定する。
本発明は、以下の処理を実行することによっても実現される。即ち、本実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPUなど)がプログラムを読み出して実行する処理である。
Claims (11)
- 画像の像振れを補正する撮像装置であって、
画像を撮影する撮像手段と、
前記撮像手段による撮影パラメータを取得する取得手段と、
前記撮像手段から得られる第1の画像と第2の画像から動きベクトルを検出する動きベクトル検出手段と、
前記動きベクトル検出手段により検出された動きベクトルを用いて、前記第1の画像と前記第2の画像の間の像振れを幾何変形パラメータとして推定する幾何変形パラメータ推定手段と、
前記幾何変形パラメータ推定手段により推定された幾何変形パラメータを用いて前記第1の画像と前記第2の画像に幾何変形を施して像振れを補正する幾何変形手段と、
前記撮影パラメータに基づいて、前記幾何変形パラメータ推定手段よる幾何変形パラメータ推定方法を変更する防振制御手段と、を有することを特徴とする撮像装置。 - 前記防振制御手段は、前記撮影パラメータに基づいて、前記動きベクトル検出手段による動きベクトルの検出方法を変更し、前記撮影パラメータに応じて、前記動きベクトル検出手段による動きベクトルの検出領域の大きさと検出数を変更することを特徴とする請求項1に記載の撮像装置。
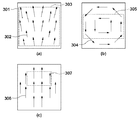
- 前記動きベクトル検出手段が検出対象とする像振れの動き成分は、並進、回転、およびあおりの少なくともいずれかを含み、
前記動きベクトルの検出領域の大きさは、前記動きベクトル検出手段が検出対象とする像振れの動き成分の種類が少ないほど小さくなり、
前記動きベクトルの検出数は、前記動きベクトル検出手段が検出対象とする像振れの動き成分の種類が少ないほど少なくなることを特徴とする請求項2に記載の撮像装置。 - 前記撮影パラメータは、前記撮像装置の焦点距離と被写体距離のいずれかを含み、
前記防振制御手段は、前記撮影パラメータとして前記焦点距離が長いほど、前記動きベクトル検出手段が検出対象とする像振れの動き成分の種類が少なくなるように制御することを特徴とする請求項2または3に記載の撮像装置。 - 前記防振制御手段は、前記撮影パラメータとして前記焦点距離が得られない場合は、前記被写体距離を用いて前記動きベクトルの検出方法と前記幾何変形パラメータ推定方法を変更し、
前記被写体距離が長い場合は、前記被写体距離が短い場合と比べて、前記防振の対象となる像振れの動き成分の種類が少なくなるように制御することを特徴とする請求項4に記載の撮像装置。 - 前記防振制御手段は、前記撮影パラメータに応じて、前記幾何変形パラメータ推定手段が算出する幾何変形パラメータの数を変更することを特徴とする請求項1ないし5のいずれか1項に記載の撮像装置。
- 前記撮影パラメータは、前記撮像装置の焦点距離と被写体距離のいずれかを含み、
前記防振制御手段は、前記撮影パラメータとして前記焦点距離が長いほど、前記幾何変形パラメータ推定手段が算出する幾何変形パラメータの数が少なくなるように制御することを特徴とする請求項6に記載の撮像装置。 - 前記幾何変形パラメータ推定手段は、算出された幾何変形パラメータに対して、過去に算出された幾何変形パラメータを用いた平滑化処理を行うことを特徴とする請求項6または7に記載の撮像装置。
- 画像の像振れを補正する撮像装置の制御方法であって、
撮像手段による撮影パラメータを取得する取得ステップと、
前記撮像手段から得られる第1の画像と第2の画像から動きベクトルを検出する動きベクトル検出ステップと、
前記動きベクトル検出ステップにより検出された動きベクトルを用いて、前記第1の画像と前記第2の画像の間の像振れを幾何変形パラメータとして推定する幾何変形パラメータ推定ステップと、
前記幾何変形パラメータ推定ステップにより推定された幾何変形パラメータを用いて前記第1の画像と前記第2の画像に幾何変形を施して像振れを補正する幾何変形ステップと、
前記撮影パラメータに基づいて、前記幾何変形パラメータ推定ステップよる幾何変形パラメータ推定方法を変更する防振制御ステップと、を有することを特徴とする撮像装置の制御方法。 - コンピュータを、請求項1ないし8のいずれか1項に記載された撮像装置の各手段として機能させるためのプログラム。
- コンピュータを、請求項1ないし8のいずれか1項に記載された撮像装置の各手段として機能させるためのプログラムを記憶した記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013170818A JP6231816B2 (ja) | 2013-08-20 | 2013-08-20 | 撮像装置およびその制御方法、プログラム並びに記憶媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013170818A JP6231816B2 (ja) | 2013-08-20 | 2013-08-20 | 撮像装置およびその制御方法、プログラム並びに記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015041819A JP2015041819A (ja) | 2015-03-02 |
| JP2015041819A5 JP2015041819A5 (ja) | 2016-09-15 |
| JP6231816B2 true JP6231816B2 (ja) | 2017-11-15 |
Family
ID=52695763
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013170818A Expired - Fee Related JP6231816B2 (ja) | 2013-08-20 | 2013-08-20 | 撮像装置およびその制御方法、プログラム並びに記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6231816B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6667268B2 (ja) | 2015-11-26 | 2020-03-18 | キヤノン株式会社 | 動きベクトル検出装置およびその制御方法、撮像装置 |
| JP6702729B2 (ja) * | 2016-01-18 | 2020-06-03 | キヤノン株式会社 | 発光制御装置、その制御方法、および制御プログラム、並びに撮像装置 |
| EP3958566B1 (en) * | 2020-08-17 | 2026-02-18 | Axis AB | Wearable camera and a method for encoding video captured by the wearable camera |
| EP3989530A1 (en) | 2020-10-23 | 2022-04-27 | Axis AB | Generating substitute image frames based on camera motion |
| CN115022548B (zh) * | 2022-06-23 | 2024-12-27 | Oppo广东移动通信有限公司 | 控制方法、控制装置、电子设备和介质 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004062270A1 (ja) * | 2002-12-26 | 2004-07-22 | Mitsubishi Denki Kabushiki Kaisha | 画像処理装置 |
| JP4958610B2 (ja) * | 2007-04-06 | 2012-06-20 | キヤノン株式会社 | 画像防振装置、撮像装置及び画像防振方法 |
| JP5074322B2 (ja) * | 2008-08-05 | 2012-11-14 | オリンパス株式会社 | 画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置 |
| JP2012085205A (ja) * | 2010-10-14 | 2012-04-26 | Canon Inc | 画像処理装置、撮像装置、画像処理方法および画像処理プログラム |
| JP6046931B2 (ja) * | 2011-08-18 | 2016-12-21 | キヤノン株式会社 | 撮像装置およびその制御方法 |
-
2013
- 2013-08-20 JP JP2013170818A patent/JP6231816B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015041819A (ja) | 2015-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205337B2 (ja) | ターゲット追跡装置および画像追跡装置ならびにそれらの動作制御方法ならびにディジタル・カメラ | |
| US9467625B2 (en) | Imaging device capable of combining images | |
| US9794500B2 (en) | Imaging device, imaging method, and image processing device | |
| US9906732B2 (en) | Image processing device, image capture device, image processing method, and program | |
| JP5189678B2 (ja) | 動画像の手ぶれ補正装置及び方法 | |
| JP6231816B2 (ja) | 撮像装置およびその制御方法、プログラム並びに記憶媒体 | |
| EP3836540B1 (en) | Image processing apparatus and image capturing apparatus | |
| US8644555B2 (en) | Device and method for detecting movement of object | |
| JP2013074313A (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP2017175364A (ja) | 画像処理装置、撮像装置および画像処理装置の制御方法 | |
| KR102592745B1 (ko) | 자세 추정 장치, 자세 추정 방법 및 기록 매체에 저장된 컴퓨터 프로그램 | |
| JP6178646B2 (ja) | 撮像装置及び像振れ補正処理方法 | |
| JP2011239157A5 (ja) | ||
| JP6282133B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP2017049947A (ja) | 画像処理装置および画像処理方法 | |
| EP4002830B1 (en) | Image pick up apparatus, image pick up method, and storage medium | |
| JP2008160300A (ja) | 画像処理装置及び撮像装置 | |
| JP6245847B2 (ja) | 画像処理装置および画像処理方法 | |
| JP6316030B2 (ja) | 撮像装置及びその制御方法 | |
| JP6808446B2 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| US20110249130A1 (en) | Electronic camera | |
| JP2012235255A (ja) | 画像処理装置及びプログラム | |
| JP5146223B2 (ja) | プログラム、カメラ、画像処理装置および画像の輪郭抽出方法 | |
| JP6381212B2 (ja) | 撮像装置及びその制御方法 | |
| JP2017173920A (ja) | 画像処理装置、画像処理方法、画像処理プログラム、および記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160802 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170922 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171020 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6231816 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |