JP6226731B2 - 撮像装置、制御方法、およびプログラム - Google Patents
撮像装置、制御方法、およびプログラム Download PDFInfo
- Publication number
- JP6226731B2 JP6226731B2 JP2013256439A JP2013256439A JP6226731B2 JP 6226731 B2 JP6226731 B2 JP 6226731B2 JP 2013256439 A JP2013256439 A JP 2013256439A JP 2013256439 A JP2013256439 A JP 2013256439A JP 6226731 B2 JP6226731 B2 JP 6226731B2
- Authority
- JP
- Japan
- Prior art keywords
- display
- posture
- imaging device
- imaging
- optical axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Studio Devices (AREA)
- Details Of Cameras Including Film Mechanisms (AREA)
- Structure And Mechanism Of Cameras (AREA)
Description
Claims (16)
- 所定の光学部品が装着可能な撮像装置であって、
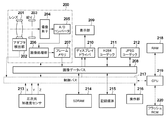
レンズ部に入射された被写体像を撮像する撮像手段と、
前記撮像手段により撮像された画像を表示するための表示手段と、
前記撮像装置の姿勢を検出する検出手段と、
前記所定の光学部品が装着されているか否かを判定する判定手段と、
前記検出手段の検出結果に応じて、前記撮像装置の姿勢を示す姿勢表示を前記表示手段に表示する制御手段と、を有し、
前記制御手段は、前記所定の光学部品が装着されているか否かに応じて、前記撮像装置の姿勢を示す姿勢表示の表示方法を切り替えることを特徴とする撮像装置。 - 前記制御手段は、前記所定の光学部品が装着されていない場合には、前記レンズ部の光軸周りの前記撮像装置の傾きを前記姿勢表示として表示し、
前記所定の光学部品が装着されている場合には、前記レンズ部の光軸の傾きを前記姿勢表示として表示することを特徴とする請求項1に記載の撮像装置。 - 前記検出手段は、前記所定の光学部品が装着されていない場合には、前記レンズ部の光軸に平行な軸方向と、前記レンズ部の光軸と直交する2つの軸のうち1つの軸方向の傾きにより前記撮像装置の姿勢を検出し、
前記所定の光学部品が装着されている場合には、前記レンズ部の光軸に直交する軸方向の傾きにより前記姿勢を検出することを特徴とする請求項1に記載の撮像装置。 - 前記制御手段は、前記所定の光学部品が装着されていない場合には、前記レンズ部の光軸に直交する軸方向の傾きを示す指標を前記表示手段に表示し、
前記所定の光学部品が装着されている場合には、鉛直方向に対する傾きを示す指標を前記表示手段に表示することを特徴とする請求項1に記載の撮像装置。 - 前記判定手段は、前記レンズ部または前記所定の光学部品の種類を識別することを特徴とする請求項1ないし4のいずれか1項に記載の撮像装置。
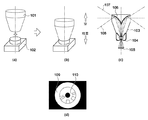
- 前記所定の光学部品は、前記レンズ部の光軸まわりの360°の被写体を前記撮像手段に結像させる全方位撮影アダプタであることを特徴とする請求項1ないし5のいずれか1項に記載の撮像装置。
- 前記制御手段は、前記全方位撮影アダプタが装着されている場合は、前記撮像手段により撮像された環状の画像と重ならない位置に前記姿勢表示を表示することを特徴とする請求項6に記載の撮像装置。
- 前記判定手段は、接写レンズを識別し、
前記制御手段は、前記接写レンズが識別されない場合には、前記レンズ部の光軸と平行な軸と、前記レンズ部の光軸と直交する2つの軸のうち1つの軸方向の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示し、
前記接写レンズが識別された場合は、前記レンズ部の光軸と直交する2つの軸のうち1つの軸方向の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示することを特徴とする請求項5に記載の撮像装置。 - 前記判定手段は、魚眼レンズを識別し、
前記制御手段は、前記魚眼レンズが識別されない場合には、前記レンズ部の光軸と平行な軸と、前記レンズ部の光軸と直交する2つの軸のうち1つの軸方向の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示し、
前記魚眼レンズが識別された場合には、前記レンズ部の光軸と直交する2つの軸方向の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示することを特徴とする請求項5に記載の撮像装置。 - 前記判定手段は、シフトレンズを識別し、
前記制御手段は、前記シフトレンズが識別された場合には、左右方向のシフトを行うときには前記レンズ部の光軸と平行な軸の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示し、
上下方向のチルトを行うときには前記レンズ部の光軸と直交する2つの軸方向の傾きにより検出された前記撮像装置の姿勢に応じて前記姿勢表示を表示することを特徴とする請求項5に記載の撮像装置。 - 前記表示手段は、表示面の角度が前記撮像装置に対して可変であり、
前記表示面の角度に応じて、前記検出手段は、前記姿勢を検出するための軸方向の傾きの値を反転し、前記制御手段は、前記姿勢表示の表示を反転させることを特徴とする請求項1ないし10のいずれか1項に記載の撮像装置。 - 前記姿勢表示は、前記撮像装置の傾きを示す電子水準器であることを特徴とする請求項1ないし11のいずれか1項に記載の撮像装置。
- レンズ部に入射された被写体像を撮像する撮像手段と、
前記撮像手段により撮像された画像を表示するための表示手段と、
撮像装置の姿勢を検出する検出手段と、
前記検出手段の検出結果に応じて、前記撮像装置の姿勢を示す姿勢表示を前記表示手段に表示させる制御手段と、を有し、
前記制御手段は、前記撮像装置が第1の状態の場合には、前記レンズ部の光軸周りの前記撮像装置の傾きを前記姿勢表示として表示し、前記撮像装置が第2の状態の場合には、前記レンズ部の光軸の傾きを前記姿勢表示として表示させることを特徴とする撮像装置。 - レンズ部に入射された被写体像を撮像する撮像手段を有し且つ所定の光学部品が装着可能な撮像装置によって撮像された画像を表示手段に表示するための制御を行う制御装置の制御方法であって、
検出手段が検出した前記撮像装置の姿勢を取得する取得工程と、
前記所定の光学部品が装着されているか否かを判定する判定工程と、
前記取得工程により取得した前記撮像装置の姿勢に応じて、前記撮像装置の姿勢を示す姿勢表示を前記表示手段に表示する制御工程と、を有し、
前記制御工程では、前記所定の光学部品が装着されているか否かに応じて、前記撮像装置の姿勢を示す姿勢表示の表示方法を切り替えることを特徴とする制御装置の制御方法。 - レンズ部に入射された被写体像を撮像する撮像手段を有する撮像装置によって撮像された画像を表示手段に表示するための制御を行う制御装置の制御方法であって、
検出手段が検出した前記撮像装置の姿勢を取得する取得工程と、
前記取得工程により取得した前記撮像装置の姿勢に応じて、前記撮像装置の姿勢を示す姿勢表示を前記表示手段に表示させる制御工程と、を有し、
前記制御工程では、前記撮像装置が第1の状態の場合には、前記レンズ部の光軸周りの前記撮像装置の傾きを前記姿勢表示として表示し、前記撮像装置が第2の状態の場合には、前記レンズ部の光軸の傾きを前記姿勢表示として表示させることを特徴とする制御装置の制御方法。 - コンピュータに、請求項14又は15に記載の制御装置の制御方法の各工程を実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013256439A JP6226731B2 (ja) | 2013-12-11 | 2013-12-11 | 撮像装置、制御方法、およびプログラム |
| US14/565,037 US9389697B2 (en) | 2013-12-11 | 2014-12-09 | Image capturing apparatus and control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013256439A JP6226731B2 (ja) | 2013-12-11 | 2013-12-11 | 撮像装置、制御方法、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015115778A JP2015115778A (ja) | 2015-06-22 |
| JP2015115778A5 JP2015115778A5 (ja) | 2017-01-26 |
| JP6226731B2 true JP6226731B2 (ja) | 2017-11-08 |
Family
ID=53271681
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013256439A Active JP6226731B2 (ja) | 2013-12-11 | 2013-12-11 | 撮像装置、制御方法、およびプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9389697B2 (ja) |
| JP (1) | JP6226731B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016025638A (ja) * | 2014-07-24 | 2016-02-08 | エイオーエフ イメージング テクノロジー リミテッド | 撮像装置および水平表示方法、並びにプログラム |
| JP7350510B2 (ja) | 2019-05-14 | 2023-09-26 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 |
| JP7350511B2 (ja) | 2019-05-14 | 2023-09-26 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 |
| JP2023093929A (ja) * | 2021-12-23 | 2023-07-05 | キヤノン株式会社 | 撮像装置 |
| JP2024170842A (ja) * | 2023-05-29 | 2024-12-11 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法、プログラム、および記憶媒体 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2806809B1 (fr) * | 2000-03-22 | 2002-11-22 | Powell Group | Dispositif d'aquisition d'image panoramique |
| US7554578B2 (en) * | 2000-07-11 | 2009-06-30 | Phase One A/S | Digital camera with integrated accelerometers |
| CN101674413B (zh) * | 2005-09-09 | 2011-12-21 | 佳能株式会社 | 摄像设备 |
| JP5499658B2 (ja) * | 2008-12-22 | 2014-05-21 | リコーイメージング株式会社 | 撮像装置 |
| JP2011114496A (ja) * | 2009-11-25 | 2011-06-09 | Olympus Imaging Corp | 撮像装置 |
| JP5402612B2 (ja) * | 2009-12-22 | 2014-01-29 | ソニー株式会社 | 表示装置、表示方法及びプログラム |
| JP5287706B2 (ja) * | 2009-12-25 | 2013-09-11 | ソニー株式会社 | 撮像装置、撮像装置の制御方法及びプログラム |
| JP5570316B2 (ja) * | 2010-06-17 | 2014-08-13 | キヤノン株式会社 | 撮像装置、その制御方法及びプログラム |
| JP2012095206A (ja) * | 2010-10-28 | 2012-05-17 | Canon Inc | 撮像装置およびその制御方法 |
| ITTO20110410A1 (it) * | 2011-05-10 | 2012-11-11 | Sisvel Technology Srl | Apparato per la cattura di immagini con correzione e gestione delle inclinazioni |
| JP5423836B2 (ja) * | 2011-08-15 | 2014-02-19 | 株式会社ニコン | ファインダユニット、撮像装置および表示制御プログラム |
-
2013
- 2013-12-11 JP JP2013256439A patent/JP6226731B2/ja active Active
-
2014
- 2014-12-09 US US14/565,037 patent/US9389697B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9389697B2 (en) | 2016-07-12 |
| JP2015115778A (ja) | 2015-06-22 |
| US20150161761A1 (en) | 2015-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5550989B2 (ja) | 撮影装置、その制御方法、及びプログラム | |
| JP5506499B2 (ja) | 撮像装置、その制御方法、プログラム及び記録媒体 | |
| US10205878B2 (en) | Image processing apparatus, image-capturing apparatus, image processing method, and non-transitory computer-readable storage medium | |
| US7978254B2 (en) | Image capturing apparatus, its controlling method, and program | |
| JP6226731B2 (ja) | 撮像装置、制御方法、およびプログラム | |
| JP5203657B2 (ja) | 拡大表示機能付きカメラ | |
| JP5248951B2 (ja) | カメラ装置、画像撮影支援装置、画像撮影支援方法、及び画像撮影支援プログラム | |
| JP2009069170A (ja) | 撮影装置および撮影装置の制御方法 | |
| JP2013012978A (ja) | デジタルカメラ | |
| JP2012120053A (ja) | 撮像装置およびその調整方法 | |
| JP5869046B2 (ja) | 撮影装置、その制御方法、及びプログラム | |
| JP2009048123A (ja) | 撮影装置および撮影装置の制御方法 | |
| JP6493746B2 (ja) | 画像追尾装置及び画像追尾方法 | |
| JP2002014405A (ja) | 電子カメラ用レンズアダプタおよび電子カメラ | |
| JP2016085248A (ja) | 露出演算装置 | |
| JP2013128165A (ja) | 撮像装置 | |
| JP2014164028A (ja) | 撮像装置および撮影パラメータの切り替え方法ならびにプログラム | |
| JP6222170B2 (ja) | 撮像装置 | |
| WO2024145837A1 (en) | Imaging apparatus, imaging-apparatus control method, and computer program product | |
| JP5764907B2 (ja) | 撮像装置 | |
| JP2011211260A (ja) | パノラマ画像撮像装置及びそのパノラマ画像合成方法 | |
| JP2010183364A (ja) | 撮像装置 | |
| JP2009229983A (ja) | 拡大表示機能付きカメラおよびカメラの制御方法 | |
| JP6121004B2 (ja) | 撮影装置、その制御方法、及びプログラム | |
| JP2018081124A (ja) | 画像処理装置、撮像装置および制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171010 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6226731 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |