JP6214877B2 - 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 - Google Patents
放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 Download PDFInfo
- Publication number
- JP6214877B2 JP6214877B2 JP2013013672A JP2013013672A JP6214877B2 JP 6214877 B2 JP6214877 B2 JP 6214877B2 JP 2013013672 A JP2013013672 A JP 2013013672A JP 2013013672 A JP2013013672 A JP 2013013672A JP 6214877 B2 JP6214877 B2 JP 6214877B2
- Authority
- JP
- Japan
- Prior art keywords
- distribution map
- radiation
- radioactive substance
- map creation
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T7/00—Details of radiation-measuring instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/167—Measuring radioactive content of objects, e.g. contamination
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/20—Drawing from basic elements, e.g. lines or circles
- G06T11/206—Drawing of charts or graphs
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- High Energy & Nuclear Physics (AREA)
- Molecular Biology (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Measurement Of Radiation (AREA)
Description
図1は、本実施の形態に係る放射性物質分布マップ作成システム1の概要を示す概念図である。放射性物質分布マップ作成システム1は、移動体10と放射性物質分布マップ作成装置100とを備えている。
2−1.移動体10
図5は、本実施の形態における移動体10の構成例を示すブロック図である。移動体10には、放射線検出器20、位置測定器30、及び姿勢測定器40が搭載されている。
図6は、本実施の形態における放射性物質分布マップ作成装置100の構成例を示すブロック図である。放射性物質分布マップ作成装置100は、コンピュータであり、処理装置110、記憶装置120及び表示装置130を備えている。
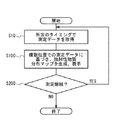
図7及び図8は、それぞれ、本実施形態に係る放射性物質分布マップ作成システム1による処理フローを示すブロック図及びフローチャートである。図7及び図8を参照して、本実施の形態に係る処理フローを説明する。
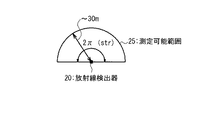
放射線検出器20は、放射性物質の測定を行い、その測定結果を示す放射線測定データNUCを生成する。放射線測定データNUCは、測定された放射線の強度(エネルギー)や、検出器上の検出位置などを示す。そして、放射線検出器20は、放射線測定データNUCを、放射性物質分布マップ作成装置100に出力する。
放射線物質分布マップ作成装置100は、移動体10の移動に伴って得られる複数位置での測定データMSRを組み合わせることによって、放射性物質分布マップDTBを作成する。また、放射線物質分布マップ作成装置100は、作成した放射性物質分布マップDTBを、表示装置130に表示する。図9は、このステップS100における処理を示すフローチャートである。
放射線信号処理部111は、放射線検出器20によって得られた放射線測定データNUCに基づいて、放射線の飛来方向、すなわち、放射線源の方向を算出する。そして、放射線信号処理部111は、算出した放射線源の方向を示す放射線源方向データDIRを生成する。
放射線源同定部112は、放射線源方向データDIR、位置データPOS、及び姿勢データATTを受け取る。そして、放射線源同定部112は、放射線源方向データDIR、位置データPOS、及び姿勢データATTを関連付けて、積算データITGに登録する。この積算データITGは、測定の繰り返しにより蓄積されるデータのかたまりである。
放射線強度算出部113は、放射線源位置データLOCと放射線測定データNUCを受け取り、放射線源の位置と測定された放射線の強度(エネルギー)とを関連付けて、積算データITGに登録する。このとき、同じ放射線源位置に関する放射線強度が既に登録されている場合は、放射線強度を積算して登録する。つまり、放射線強度算出部113は、同定されたそれぞれの放射線源位置に関して測定された放射線強度を積算していく。そして、放射線強度算出部113は、積算放射線強度を示す放射線強度データINTを生成する。
核種分析部114は、観測された放射性物質の核種を判別する。具体的には、核種分析部114は、放射線強度データINTに基づいてエネルギースペクトルを作成し、既知の核種固有のエネルギーデータを参照して放射性物質の核種を判別する。そして、核種分析部114は、核種判別結果を示す核種分析データSPEを生成する。
分布マップ生成部115は、積算データITGに登録されている放射線源位置データLOCを組み合わせて、放射性物質分布マップDTBを作成、更新する。このとき、分布マップ生成部115は、放射線強度データINTを参照して、それぞれの放射線源での放射線強度が分かるように放射性物質分布マップDTBを作成してもよい。また、分布マップ生成部115は、核種分析データSPEを参照して、核種毎に識別可能なように放射性物質分布マップDTBを作成してもよい。
分布マップ表示部116は、作成された放射性物質分布マップDTBを表示装置130に表示する。放射性物質分布マップDTBが核種毎に識別可能なように作成されている場合、表示装置130においても、核種毎に識別可能なように放射性物質分布マップDTBは表示される。また、分布マップ表示部116は、国土地理院発行の地図を示す地図データMAPを読み出し、放射性物質分布マップDTBを地図に重ね合わせて表示してもよい。
再度図8を参照して、測定を継続する場合(ステップS200;Yes)、処理は上記のステップS10に戻る。測定を終了する場合(ステップS200;No)、処理は終了する。
次に、本実施の形態の変形例を説明する。図10は、変形例における移動体10の構成例を示すブロック図である。図11は、変形例における処理フローを示すブロック図である。上述の説明と重複する説明は適宜省略する。
以上に説明されたように、本実施の形態によれば、放射線検出器20が移動体10に搭載される。そして、移動体10の移動に伴って得られる複数位置での測定データMSRを組み合わせることによって、広範囲の放射性物質分布マップDTBが迅速に作成される。
10 移動体
20 放射線検出器
25 測定可能範囲
30 位置測定器
40 姿勢測定器
50 可視光カメラ
100 放射性物質分布マップ作成装置
110 処理装置
111 放射線信号処理部
112 放射線源同定部
113 放射線強度算出部
114 核種分析部
115 分布マップ生成部
116 分布マップ表示部
120 記憶装置
130 表示装置
NUC 放射線測定データ
POS 位置データ
ATT 姿勢データ
MSR 測定データ
DIR 放射線源方向データ
LOC 放射線源位置データ
INT 放射線強度データ
SPE 核種分析データ
ITG 積算データ
DTB 放射性物質分布マップ
MAP 地図データ
VIS 可視光画像データ
PROG プログラム
Claims (9)
- 移動体に搭載され、放射線源としての1以上の放射性物質の測定を行う放射線検出器と、
前記移動体の位置データを発生する位置測定器と、
前記放射線検出器の姿勢データを生成する姿勢測定器と、
前記放射線検出器による測定結果と、前記位置測定器によって生成された前記移動体の位置データと、前記姿勢測定器により生成される前記放射線検出器の姿勢データとを含む測定データを受け取る放射性物質分布マップ作成装置と
を備え、
前記放射性物質分布マップ作成装置は、前記放射線検出器による前記測定結果に基づいて放射線源の方向データを算出し、
前記放射性物質分布マップ作成装置は、前記放射線検出器の前記姿勢データと、前記移動体の前記位置データと、前記移動体が移動している間に複数位置で得られた前記放射線源の方向データとに基づいて前記放射線源の位置を同定し、
前記放射性物質分布マップ作成装置は、前記放射線源の位置を組み合わせることによって前記放射性物質の分布マップを作成する
放射性物質分布マップ作成システム。 - 請求項1に記載の放射性物質分布マップ作成システムであって、
前記放射線検出器は、コンプトンカメラである
放射性物質分布マップ作成システム。 - 請求項1又は2に記載の放射性物質分布マップ作成システムであって、
前記放射性物質分布マップ作成装置は、表示装置を備え、前記作成した分布マップを前記表示装置に表示する
放射性物質分布マップ作成システム。 - 請求項3に記載の放射性物質分布マップ作成システムであって、
前記放射線検出器による前記測定結果は、観測された放射線の強度を含み、
前記放射性物質分布マップ作成装置は、前記観測された放射線の前記強度に基づいて前記放射性物質の核種を判別し、前記核種毎に識別可能なように前記作成した分布マップを前記表示装置に表示する
放射性物質分布マップ作成システム。 - 請求項3又は4に記載の放射性物質分布マップ作成システムであって、
前記放射性物質分布マップ作成装置は、前記作成した分布マップを地図に重ね合わせて前記表示装置に表示する
放射性物質分布マップ作成システム。 - 請求項3乃至5のいずれか一項に記載の放射性物質分布マップ作成システムであって、
更に、
前記移動体に搭載された可視光カメラ
を備え、
前記放射性物質分布マップ作成装置は、前記可視光カメラによって撮像された可視光画像を受け取り、前記作成した分布マップを前記可視光画像に重ね合わせて前記表示装置に表示する
放射性物質分布マップ作成システム。 - 請求項1乃至6のいずれか一項に記載の放射性物質分布マップ作成システムであって、
前記移動体は、航空機である
放射性物質分布マップ作成システム。 - 請求項1乃至6のいずれか一項に記載の放射性物質分布マップ作成システムであって、
前記移動体は、車両である
放射性物質分布マップ作成システム。 - 移動体に搭載された放射線検出器を用いて、放射線源としての1以上の放射性物質からの放射線を測定を行うステップと、
前記移動体の位置データを生成するステップと、
前記放射線検出器の姿勢データを生成するステップと、
前記放射線検出器による測定結果に基づいて前記放射線源の方向データを算出するステップと、
前記移動体を移動させるステップと、
前記放射線検出器の前記姿勢データと、前記移動体の前記位置データと、前記移動体が移動している間に複数位置で得られた前記放射線源の方向データとに基づいて前記放射線源の位置を同定するステップと、
前記同定された放射線源の位置を組み合わせることによって前記放射性物質の分布マップを作成するステップと
を含む
放射性物質分布マップ作成方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013672A JP6214877B2 (ja) | 2013-01-28 | 2013-01-28 | 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 |
| EP13873014.8A EP2950118A4 (en) | 2013-01-28 | 2013-05-16 | SYSTEM AND METHOD FOR CREATING MAPS FOR DISTRIBUTING RADIOACTIVE MATERIALS |
| CN201380071572.2A CN105026957A (zh) | 2013-01-28 | 2013-05-16 | 放射性物质分布图制作系统以及放射性物质分布图制作方法 |
| US14/763,623 US9990751B2 (en) | 2013-01-28 | 2013-05-16 | Radioactive substance distribution map producing system and method of producing radioactive substance distribution map |
| PCT/JP2013/063627 WO2014115348A1 (ja) | 2013-01-28 | 2013-05-16 | 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013672A JP6214877B2 (ja) | 2013-01-28 | 2013-01-28 | 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014145628A JP2014145628A (ja) | 2014-08-14 |
| JP2014145628A5 JP2014145628A5 (ja) | 2015-11-19 |
| JP6214877B2 true JP6214877B2 (ja) | 2017-10-18 |
Family
ID=51227158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013013672A Active JP6214877B2 (ja) | 2013-01-28 | 2013-01-28 | 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9990751B2 (ja) |
| EP (1) | EP2950118A4 (ja) |
| JP (1) | JP6214877B2 (ja) |
| CN (1) | CN105026957A (ja) |
| WO (1) | WO2014115348A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6677568B2 (ja) * | 2016-04-18 | 2020-04-08 | 日立Geニュークリア・エナジー株式会社 | 放射能分布解析システムおよび放射能分布解析方法 |
| GB201611506D0 (en) * | 2016-06-30 | 2016-08-17 | Create Tech Ltd | Radiation imaging apparatus |
| WO2018116584A1 (ja) * | 2016-12-21 | 2018-06-28 | 三菱電機株式会社 | 放射能分布測定装置及び方法 |
| KR102057189B1 (ko) | 2018-04-24 | 2019-12-18 | (주)엔씨스퀘어 | 무인항공기를 이용한 방사성물질 탐지방법 |
| JP7165348B2 (ja) * | 2018-09-14 | 2022-11-04 | 株式会社千代田テクノル | 放射線分布の3次元表示方法及び装置 |
| CN110045409A (zh) * | 2018-12-29 | 2019-07-23 | 同方威视技术股份有限公司 | 放射性物质监测装置、系统及其监测方法 |
| CN112180418A (zh) * | 2020-04-21 | 2021-01-05 | 宁波甬东核辐射监测有限公司 | 一种定位放射源的方法、飞行设备、地面工作站及系统 |
| KR102606441B1 (ko) * | 2023-06-21 | 2023-11-24 | 고등기술연구원연구조합 | 방사선 측정장치 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9810434D0 (en) | 1998-05-15 | 1998-07-15 | British Nuclear Fuels Plc | Improvements in and relating to monitoring emissions |
| JP2001153952A (ja) * | 1999-11-26 | 2001-06-08 | Nippon Anzen Hosho Keibi Kk | 放射能拡散状況把握システム |
| JP2001208848A (ja) * | 2000-01-27 | 2001-08-03 | Aloka Co Ltd | 放射線測定システム及び方法 |
| JP2001311791A (ja) * | 2000-04-28 | 2001-11-09 | Hitachi Engineering & Services Co Ltd | 放射線汚染状況監視方法および装置 |
| JP3897245B2 (ja) | 2002-04-24 | 2007-03-22 | 三菱重工業株式会社 | 多層放射線検出器を用いたガンマ線源の距離測定装置 |
| US7994926B2 (en) * | 2007-07-05 | 2011-08-09 | Purdue Research Foundation | Nuclear detection via a system of widely distributed low cost detectors having data including gamma intensities, time stamps and geo-positions |
| JP4634494B2 (ja) | 2008-10-31 | 2011-02-16 | 独立行政法人 宇宙航空研究開発機構 | 放射線源位置検出システム、及び放射線源位置検出用プローブ |
| JP2010266304A (ja) * | 2009-05-14 | 2010-11-25 | Genden Information System Co Ltd | 緊急時環境放射線モニタリングシステム及びその方法 |
| US8335363B2 (en) | 2009-06-16 | 2012-12-18 | Jefferson Science Associates, Llc | Method for image reconstruction of moving radionuclide source distribution |
| US20120008828A1 (en) | 2010-04-13 | 2012-01-12 | Brian David Yanoff | Target-linked radiation imaging system |
| US20120043467A1 (en) * | 2010-08-17 | 2012-02-23 | Andrey Gueorguiev | Single plane compton camera |
| JP2012251918A (ja) * | 2011-06-06 | 2012-12-20 | Kodaira Associates Kk | 放射能量分布情報生成装置 |
| JP5955546B2 (ja) | 2011-12-26 | 2016-07-20 | 国立大学法人京都大学 | 放射線量率マップデータ収集システム |
| CN102692637B (zh) | 2012-05-25 | 2014-04-16 | 西南科技大学 | 基于遥操作装置的核辐射环境虚拟重建系统及方法 |
| JP3181739U (ja) | 2012-12-03 | 2013-02-21 | いであ株式会社 | 曳航式水中放射能測定システム |
-
2013
- 2013-01-28 JP JP2013013672A patent/JP6214877B2/ja active Active
- 2013-05-16 CN CN201380071572.2A patent/CN105026957A/zh active Pending
- 2013-05-16 EP EP13873014.8A patent/EP2950118A4/en not_active Withdrawn
- 2013-05-16 WO PCT/JP2013/063627 patent/WO2014115348A1/ja active Application Filing
- 2013-05-16 US US14/763,623 patent/US9990751B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2950118A1 (en) | 2015-12-02 |
| JP2014145628A (ja) | 2014-08-14 |
| US9990751B2 (en) | 2018-06-05 |
| US20150363956A1 (en) | 2015-12-17 |
| EP2950118A4 (en) | 2016-09-21 |
| WO2014115348A1 (ja) | 2014-07-31 |
| CN105026957A (zh) | 2015-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6214877B2 (ja) | 放射性物質分布マップ作成システム及び放射性物質分布マップ作成方法 | |
| CN105510952B (zh) | 飞行模式CdZnTe巡检系统和巡检方法 | |
| CN103163548A (zh) | 基于伽马相机的放射性物质探测方法及其装置和系统 | |
| Pavlovsky et al. | 3-D radiation mapping in real-time with the localization and mapping platform LAMP from unmanned aerial systems and man-portable configurations | |
| US10401510B2 (en) | Gamma ray detector with two-dimensional directionality | |
| WO2021026280A1 (en) | Radiation source localization systems and methods | |
| Burtniak et al. | Application of a territorial remote radiation monitoring system at the Chornobyl nuclear accident site | |
| Bukartas et al. | A Bayesian method to localize lost gamma sources | |
| JP2014145628A5 (ja) | ||
| KR20160081307A (ko) | 방사선원의 3차원 영상 처리 장치 및 방법 | |
| Nampalliwar et al. | Testing horizon topology with electromagnetic observations | |
| JP2011047950A (ja) | デッドレコニング装置 | |
| ES2827957T3 (es) | Aparato y método para la inspección no invasiva de cuerpos sólidos mediante la obtención de imágenes mediante muones | |
| Cooper et al. | Intelligent radiation sensor system (irss) advanced technology demonstrator (atd) | |
| KR101741246B1 (ko) | 회전 변조 시준기를 이용한 감마선/중성자 이중 영상 처리 장치 및 방법 | |
| Lazna | Optimizing the localization of gamma radiation point sources using a UGV | |
| McCann et al. | Which is better, a SCoTSS gamma imager, or an ARDUO UAV-borne directional detector? | |
| US11054535B2 (en) | Efficient, dual-particle directional detection system using a rotating scatter mask | |
| Lazna et al. | Multi-robotic area exploration for environmental protection | |
| US8878138B2 (en) | Multi-sensor neutron source location system | |
| Barnowski | Development and evaluation of real-time volumetric Compton gamma-ray imaging | |
| Cooper et al. | Integration of inertial measurement data for improved localization and tracking of radiation sources | |
| Jacobs et al. | Multiple Source Localization by Sensor Fusion of Digital Magnetic Compass Data with Spectroscopic Data | |
| Stadnikia et al. | Data-fusion for a vision-aided radiological detection system: sensor dependence and source tracking | |
| KR101308937B1 (ko) | 차량을 이용한 방사능오염 탐사장치 및 그를 이용한 탐사 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151001 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151001 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170823 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6214877 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |